FUEGO — Fire Urgency Estimator in Geosynchronous Orbit — A Proposed Early-Warning Fire Detection System


 ,
,
Abstract
:1. Introduction
1.1. Overview
1.2. Technological Enablers and Challenges
1.3. Fire in California
1.4. Current Wildland Fire Detection
1.5. Fire Spreading Rate
1.6. Fire Detection with Remote Sensing
1.6.1. Fire Detection from Low Earth Orbit
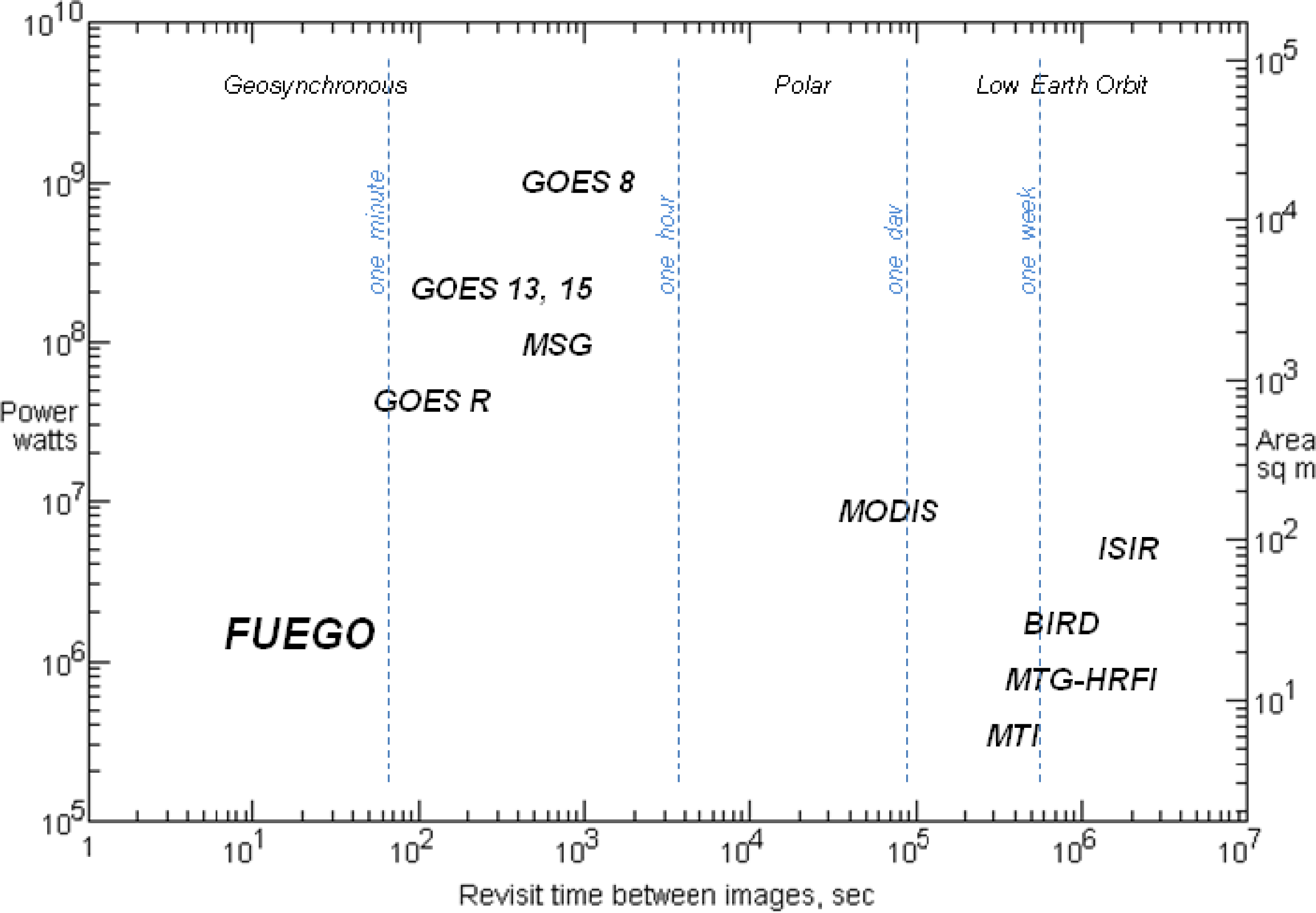
1.6.2. Fire Visibility from Geosynchronous Orbit
1.6.3. GOES R and Fires
2. The Proposed FUEGO System
- Multi-spectral sensing using newly available large format HgCdTe sensors;
- Rapid mathematical classification of trends using subtraction of images from a few seconds to minutes before, dithering of images to improve resolution, and other spectral and time domain algorithms to reject false alarms;
- Onboard software and computational hardware that can yield calibrated decisions;
- Time-sensitive autonomous, multi-spectral adjustment of detection thresholds that deliver robust detections with low false alarm rates in the face of constantly varying conditions; and
- Precision space craft pointing and replicability for robust image acquisition.
2.1. Signal to Noise Calculations
- Fire detection at night; clear or lightly overcast sky;
- Fire detection at night, heavy cloud cover and/or smoke;
- Fire detection during daytime, clear or lightly overcast sky; and
- Fire detection during daytime, heavy cloud cover and/or smoke.
2.2. Rejection of False Positives
2.2.1. Utilizing Inherent Information in the Signal to Reject False Alarms
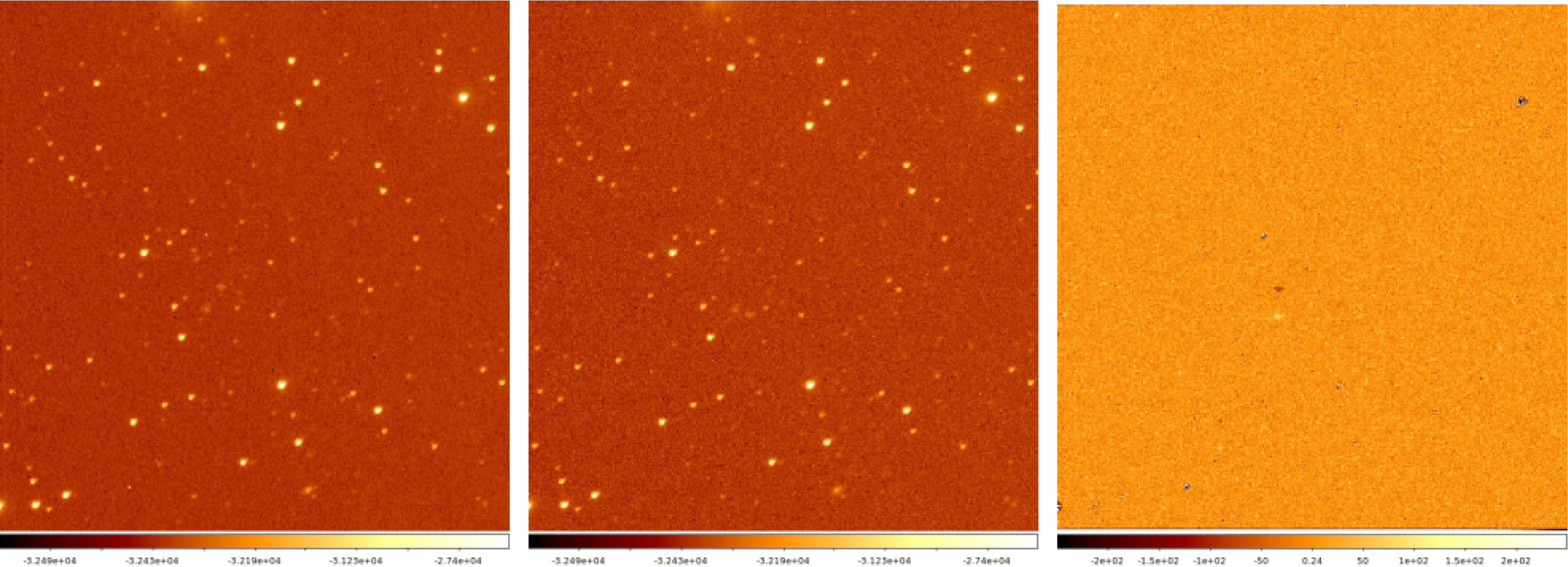
2.2.2. Image Subtraction and Related Algorithms
2.2.3. Follow-Up of Candidates
3. Exploring the Proposed FUEGO System
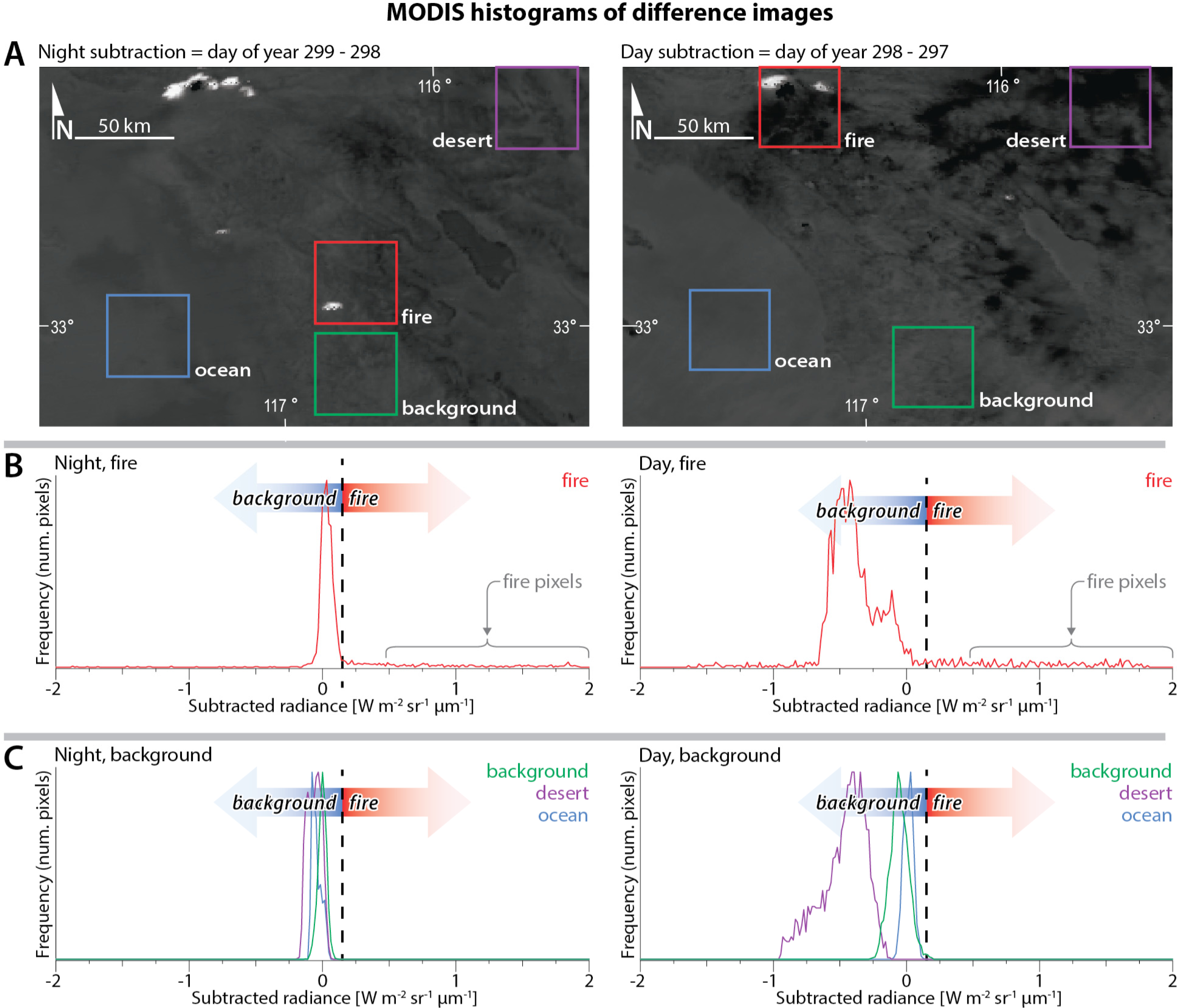
3.1. Examples of Fire Detection with MODIS
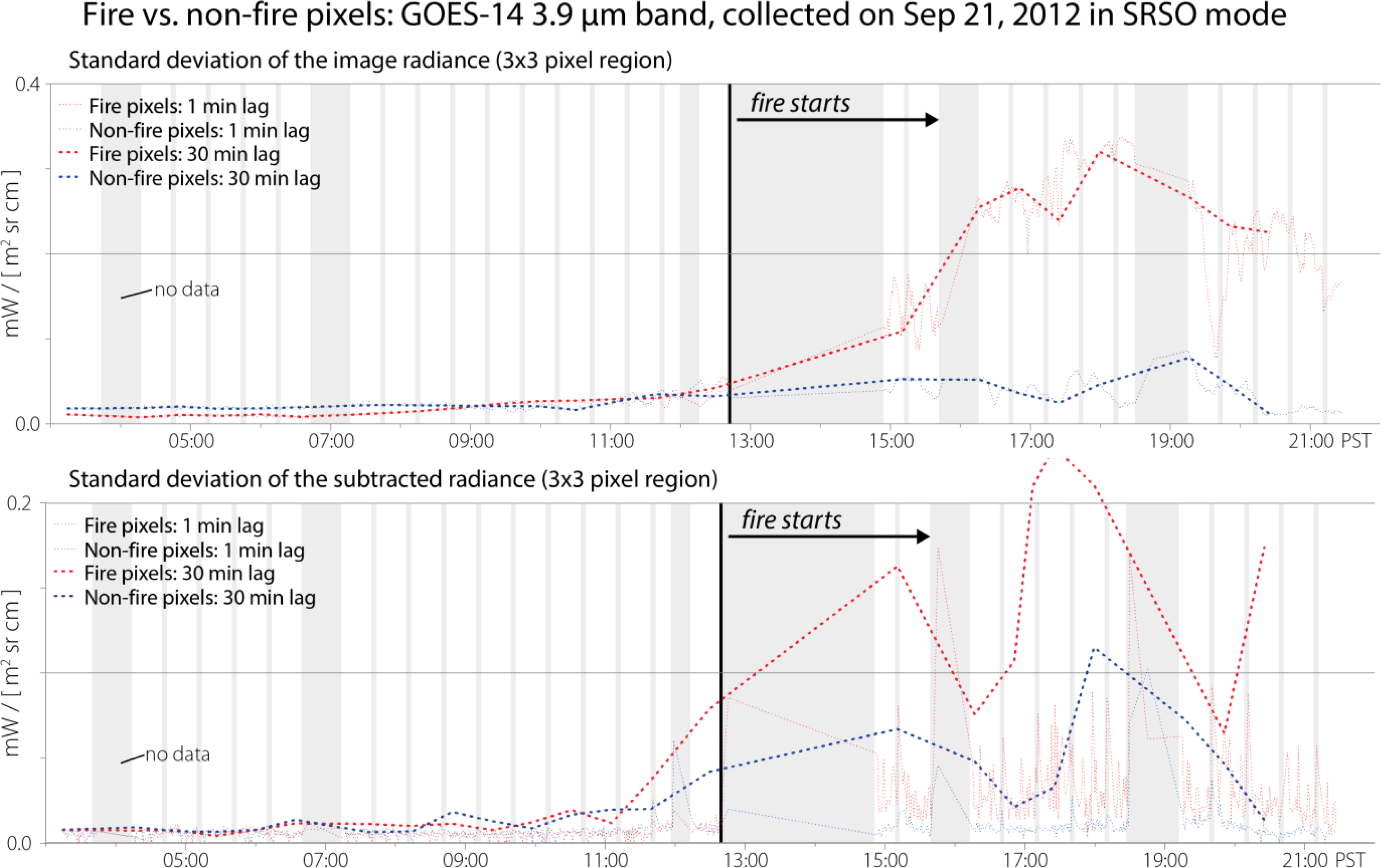
3.2. Shorter Time Gaps between Images Reduce Standard Deviation of the Background in Subtracted Images
3.3. Reduction of False Alarms with Optimal Subtractions
4. Opportunities for FUEGO Instrumentation and Computing
5. Preliminary FUEGO Satellite Design Concepts
6. Conclusions
Acknowledgments
Conflict of Interest
References
- Stephens, S.L.; McIver, J.D.; Boerner, R.E.J.; Fettig, C.J.; Fontaine, J.B.; Hartsough, B.R.; Kennedy, P.; Schwilk, D.W. The effects of forest fuel-reduction treatments in the United States. BioScience 2012, 62, 549–560. [Google Scholar]
- Westerling, A.; Bryant, B. Climate change and wildfire in California. Clim. Chang 2008, 87, 231–249. [Google Scholar]
- Hayhoe, K.; Cayan, D.; Field, C.B.; Frumhoff, P.C.; Maurer, E.P.; Miller, N.L.; Moser, S.C.; Schneider, S.H.; Cahill, K.N.; Cleland, E.E. Emissions pathways, climate change, and impacts on California. Proc. Natl. Acad. Sci. USA 2004, 101, 12422–12427. [Google Scholar]
- Millar, C.I.; Stephenson, N.L.; Stephens, S.L. Climate change and forests of the future: Managing in the face of uncertainty. Ecol. Appl 2007, 17, 2145–2151. [Google Scholar]
- Sugihara, N.; Wagtendonk, J.; Shaffer, K.; Fites-Kaufman, J.; Thode, A. Fire in California’s Ecosystems; Univ of California Press: Berkeley, CA, USA, 2006; p. 596. [Google Scholar]
- Rothermal, R.C. How to Predict the Spread and Intensity of Forest and Range Fires; National Advanced Resource Technology Center: Marana, AZ, USA, 1983; p. 3. [Google Scholar]
- Wooster, M.J.; Zhukov, B.; Oertel, D. Fire radiative energy for quantitative study of biomass burning: Derivation from the BIRD experimental satellite and comparison to MODIS fire products. Remote Sens. Environ 2003, 86, 83–107. [Google Scholar]
- FUEGOSAT. Demonstration Satellite, European Space Agency’s Living Planet Program; European Space Agency: Noordwijk, The Netherlands, 2006. [Google Scholar]
- FUEGOSAT. Exploitation of BIRD Data and Preparation for Risk Management Concept Validation (FIREBIRD); European Space Agency Publications Division: Noordwijk, The Netherlands, 2002; p. 4423. [Google Scholar]
- FUEGOTEC. Technology Demonstration Small Mission—FUEGOTEC. Available online: http://www.esa.int/About_Us/GSP/Infrastructure_br_96_N21 (accessed on 30 September 2013).
- Prins, E.M.; Feltz, J.M.; Menzel, W.P.; Ward, D.E. An overview of GOES-8 diurnal fire and smoke results for SCAR-B and the 1995 fire season in South America. J. Geophys. Res 1998, 103, 821–835. [Google Scholar]
- van den Bergh, F.; Frost, P.E. A Multi-Temporal Approach to Fire Detection Using MSG Data. Proceedings of the 2nd IEEE International Workshop on the Analysis of Multitemporal Remote Sensing Images, Biloxi, MS, USA, 16–18 May 2005; pp. 156–160.
- Sifakis, N.I.; Iossifidis, C.; Kontoes, C.; Keramitsoglou, I. Wildfire detection and tracking over Greece using MSG-SEVIRI satellite data. Remote Sens 2011, 3, 524–538. [Google Scholar]
- Alard, C.; Lupton, R.H. A method for optimal image subtraction. Astrophys. J 1998, 503, 325. [Google Scholar]
- Hartung, S.; Shukla, H.; Miller, J.P.; Pennypacker, C. GPU Acceleration of Image Convolution Using Spatially-Varying Kernel. Proceedings of IEEE International Conference on Image Processing (ICIP), Orlando, FL, USA, 30 September 2012; pp. 1685–1688.
- Miller, J.P.; Pennypacker, C.R.; White, G.L. Optimal image subtraction method: Summary derivations, applications, and publicly shared application using IDL. Publ. Astron. Soc. Pac 2008, 120, 449–464. [Google Scholar]
- Hartung, S.H. Personal Communication. 30 September 2012. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed/Suggested System Parameter | Value |
|---|---|
| Wave Band | 3.4 to 4 microns |
| Diameter of Primary Mirror | 0.5 m |
| Infrared Detector and Pixels | Teledyne H4RGT 4,096 × 4,096 pixels2 |
| Areal Coverage in One Field | 295 km × 295 km |
| Projected Pixel Size at Nadir Viewing | 72 m |
| Projected Diffraction Diam @ 2 microns | 72 m |
| Projected Diffraction Diam @ 4 microns | 144 m |
| Signal detected from a 3 m × 3 m 1100 K fire (assume 10% system efficiency) at FUEGO | 1.2 × 106 photons/second detected |
| Noon Background per Resolution Element (assume a 290 m resolution element) | 4 × 107 photons/second detected |
| Noon Signal/noise in One second integration (assuming Poisson counting statistics) | 387 |
| Comments | Noise will almost certainly arise from artifacts of subtraction of image. |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Pennypacker, C.R.; Jakubowski, M.K.; Kelly, M.; Lampton, M.; Schmidt, C.; Stephens, S.; Tripp, R. FUEGO — Fire Urgency Estimator in Geosynchronous Orbit — A Proposed Early-Warning Fire Detection System. Remote Sens. 2013, 5, 5173-5192. https://doi.org/10.3390/rs5105173
Pennypacker CR, Jakubowski MK, Kelly M, Lampton M, Schmidt C, Stephens S, Tripp R. FUEGO — Fire Urgency Estimator in Geosynchronous Orbit — A Proposed Early-Warning Fire Detection System. Remote Sensing. 2013; 5(10):5173-5192. https://doi.org/10.3390/rs5105173
Chicago/Turabian StylePennypacker, Carlton R., Marek K. Jakubowski, Maggi Kelly, Michael Lampton, Christopher Schmidt, Scott Stephens, and Robert Tripp. 2013. "FUEGO — Fire Urgency Estimator in Geosynchronous Orbit — A Proposed Early-Warning Fire Detection System" Remote Sensing 5, no. 10: 5173-5192. https://doi.org/10.3390/rs5105173