Automatic Seamline Network Generation for Urban Orthophoto Mosaicking with the Use of a Digital Surface Model

Abstract
:
1. Introduction
1.1. Background

1.2. Related Works
1.3. Proposed Approach
2. Methodology
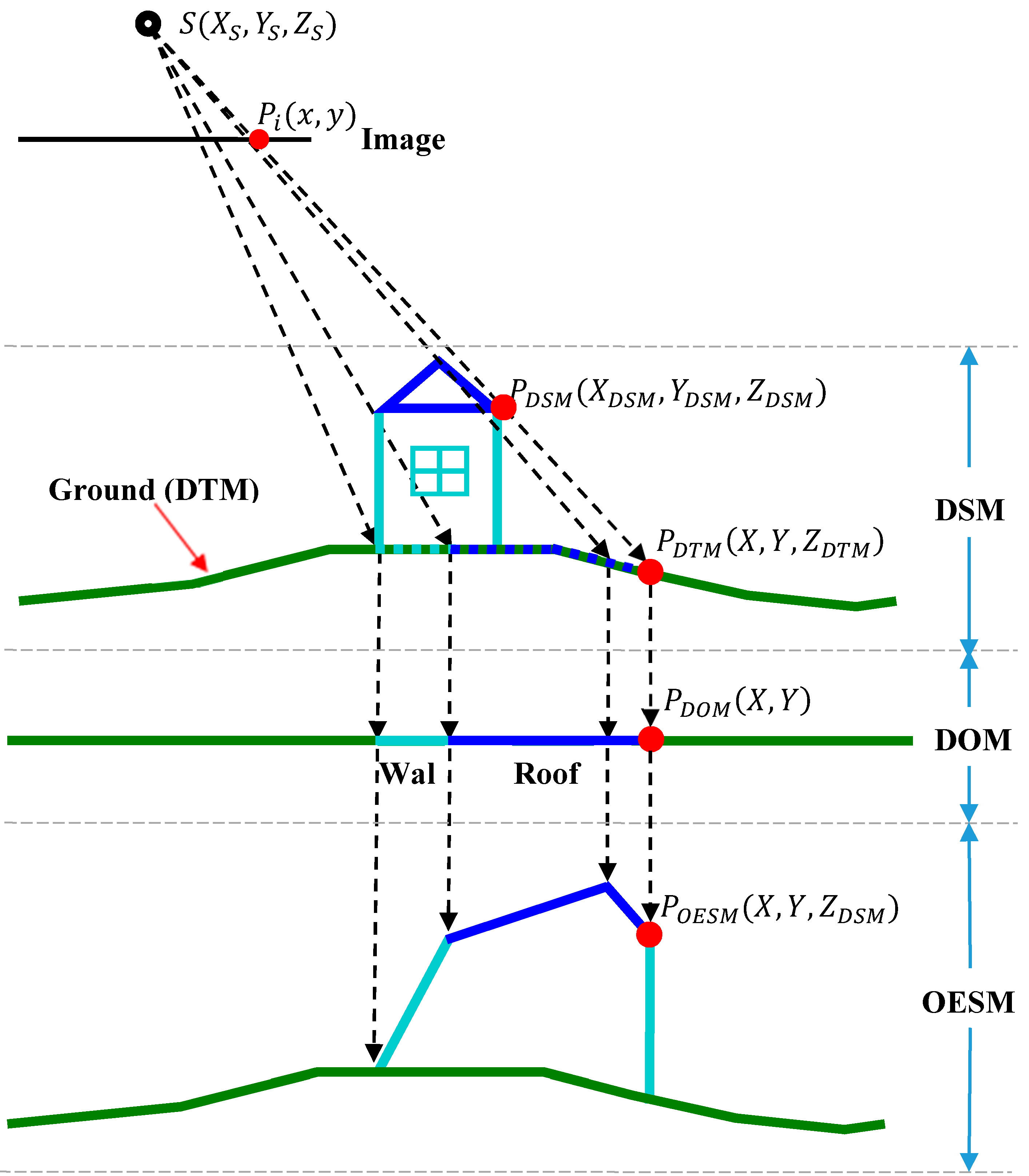
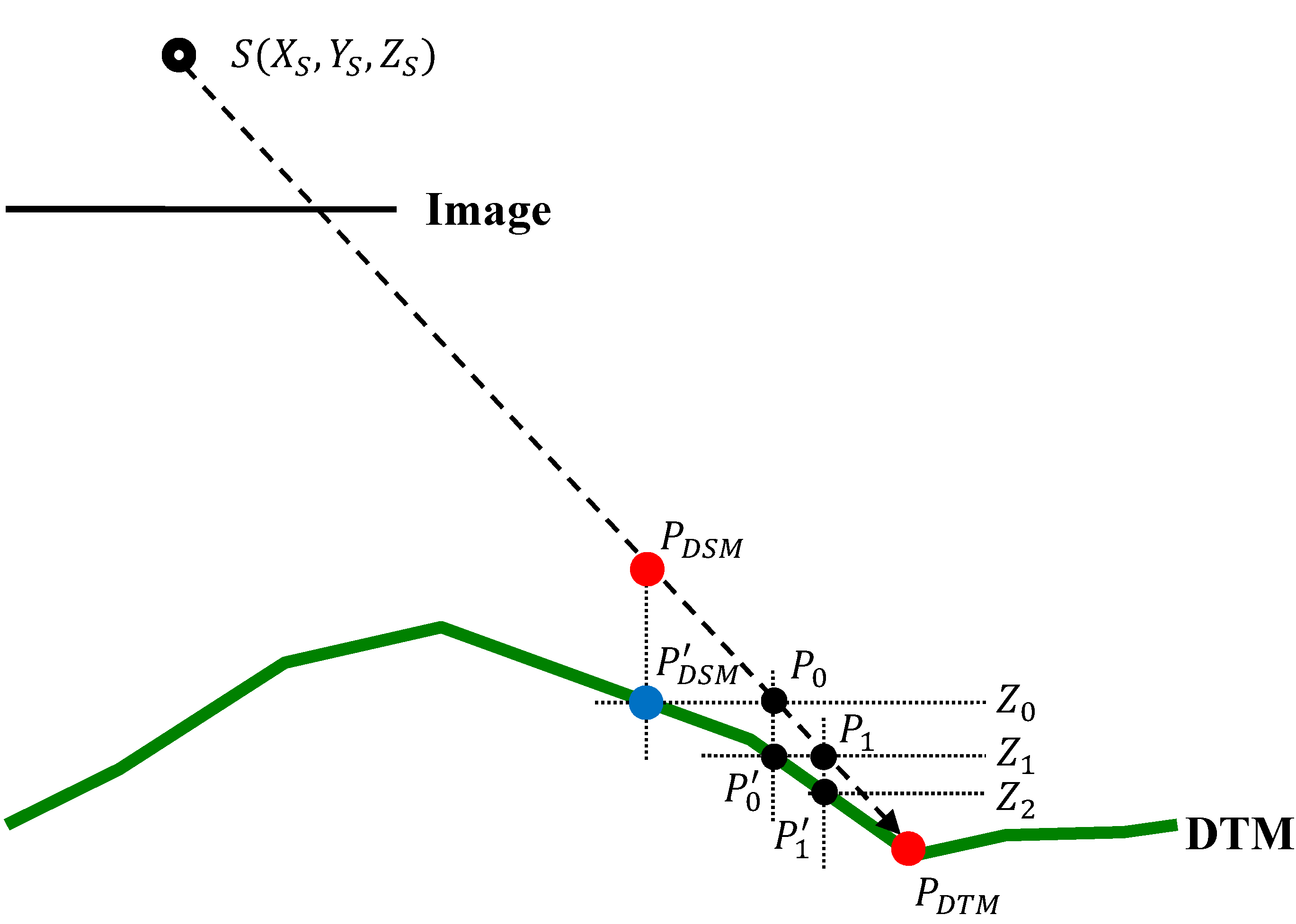
2.1. Orthoimage Elevation Synchronous Model


- (1)
- A blank OESM is created with the same range and grid size as those of the DTM.
- (2)
- The coordinates for each point projected from the DSM to the DTM are calculated, and the elevation value of the projected point is replaced with that of the DSM point using the aforementioned method. The point with an updated elevation is then added to the created OESM. When two or more DSM points are projected onto the same grid in OESM, the principle of Z-buffer [32] is adopted to determine which points are occluded by others. The distances from the projection center to all of the points are calculated; the point with a minimum distance is considered visible, and its elevation will be assigned to the OESM grid, whereas other points are regarded as occluded.
- (3)
- After completing the projection for all DSM points, a Delaunay triangulated irregular network is constructed using all of the added grid points [33], and the complete OESM can be obtained through interpolation.
2.2. Seamline Selection between Two DOMs





- (1)
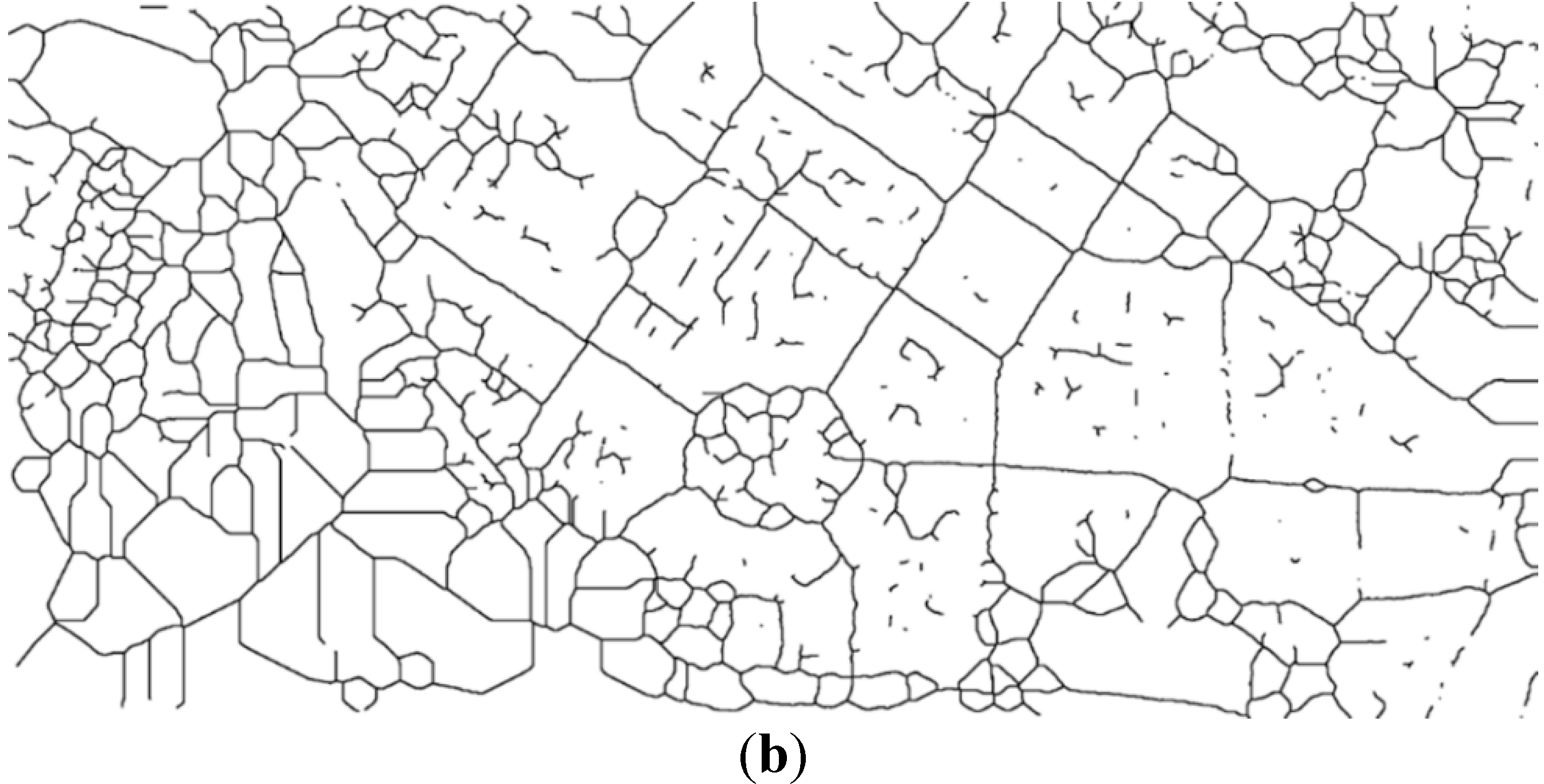
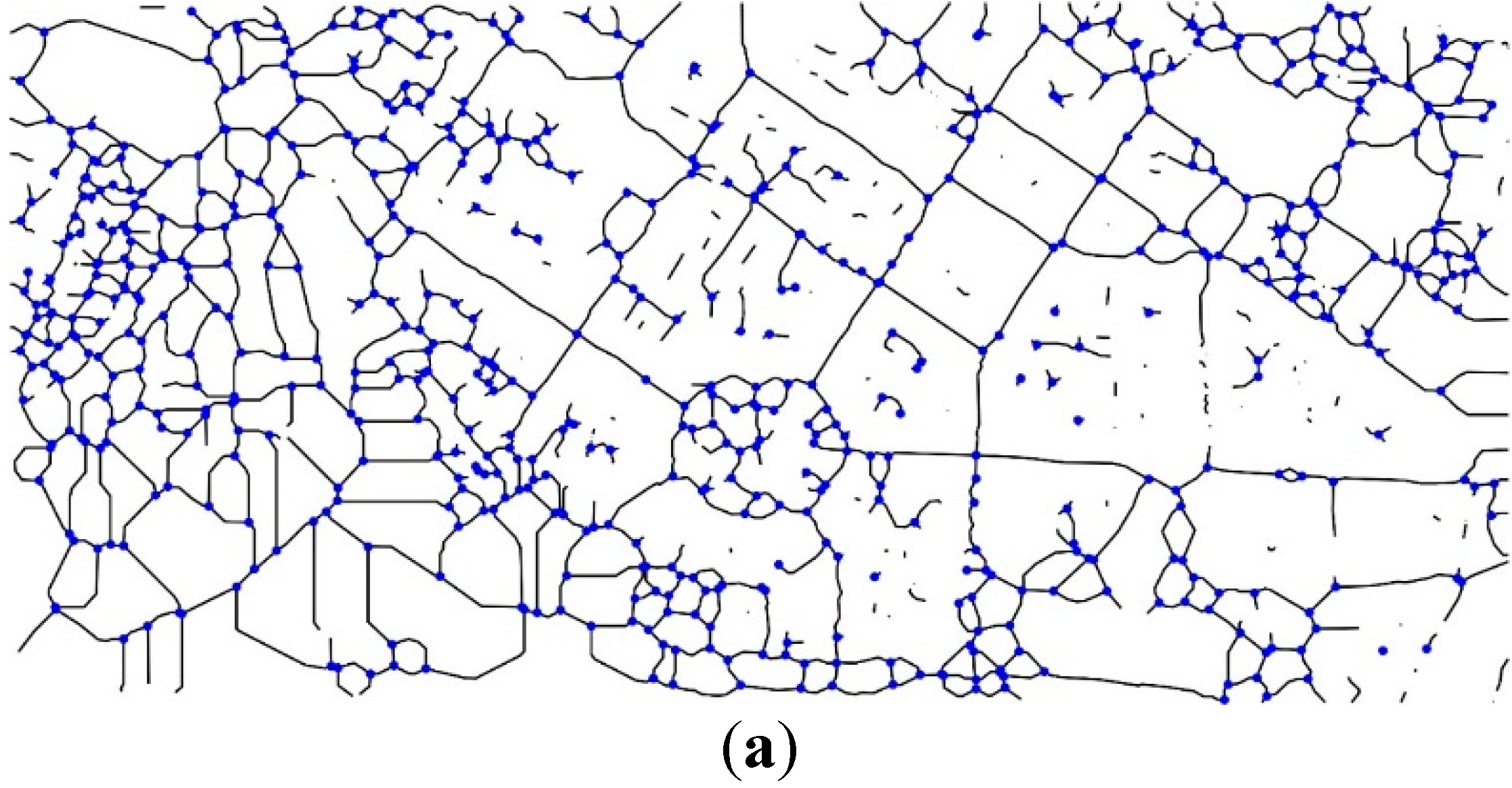
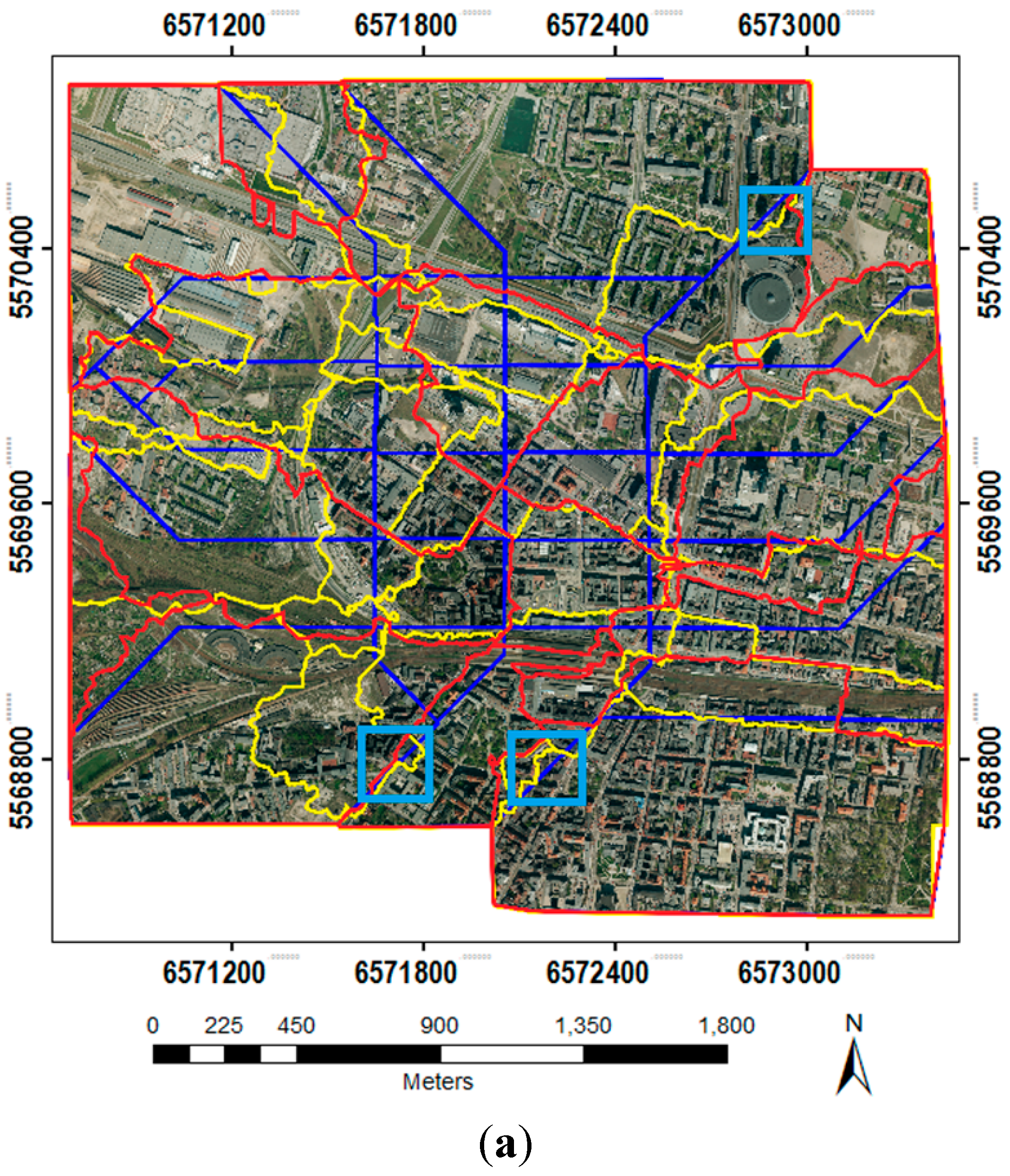
- Candidate nodes and segments are determined from the network. First, intersection points with at least three paths crossing are selected as candidate nodes, as shown in the blue solid dots in Figure 7a. Next, the lines connected by two neighboring candidate nodes are considered as segments.
- (2)
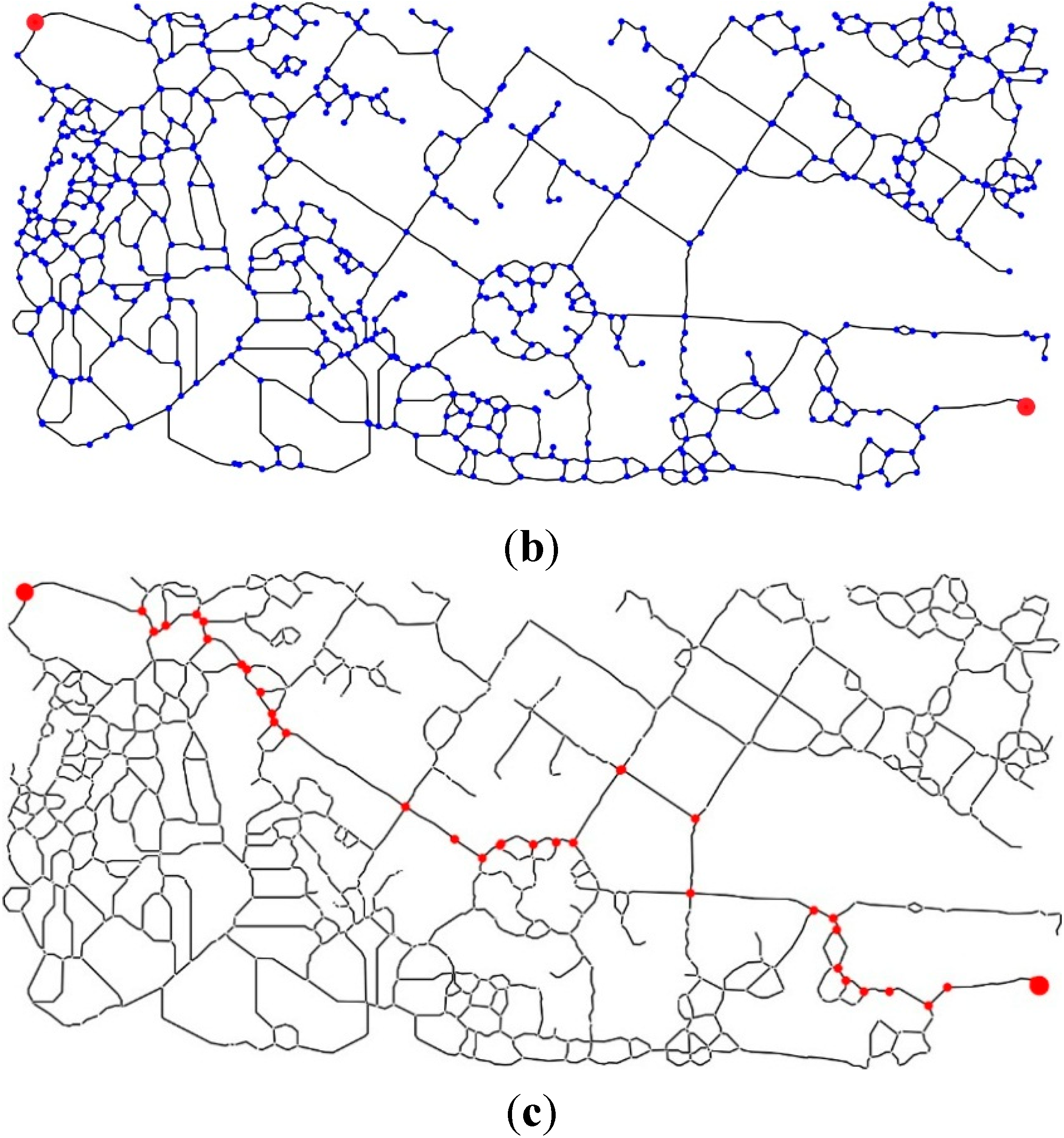
- The useless nodes and segments are removed. First, the two candidate nodes nearest to the endpoints of the initial seamline (the skeleton) are chosen as the entrance and exit points, respectively (as shown in the red solid dots in Figure 7b). Subsequently, every candidate node is checked by assessing whether such a node can be connected to the entrance and exit through several segments. If the node is disconnected from the entrance or exit, this node is deleted. After removing all of the useless nodes, the segments that meet the condition that any endpoint is no longer a candidate node are also deleted. Figure 7b shows the path network without the redundant nodes and segments.
- (3)
- The least-cost path is determined as the seamline from the simplified network.




2.3. Construction of the Seamline Network
- (1)
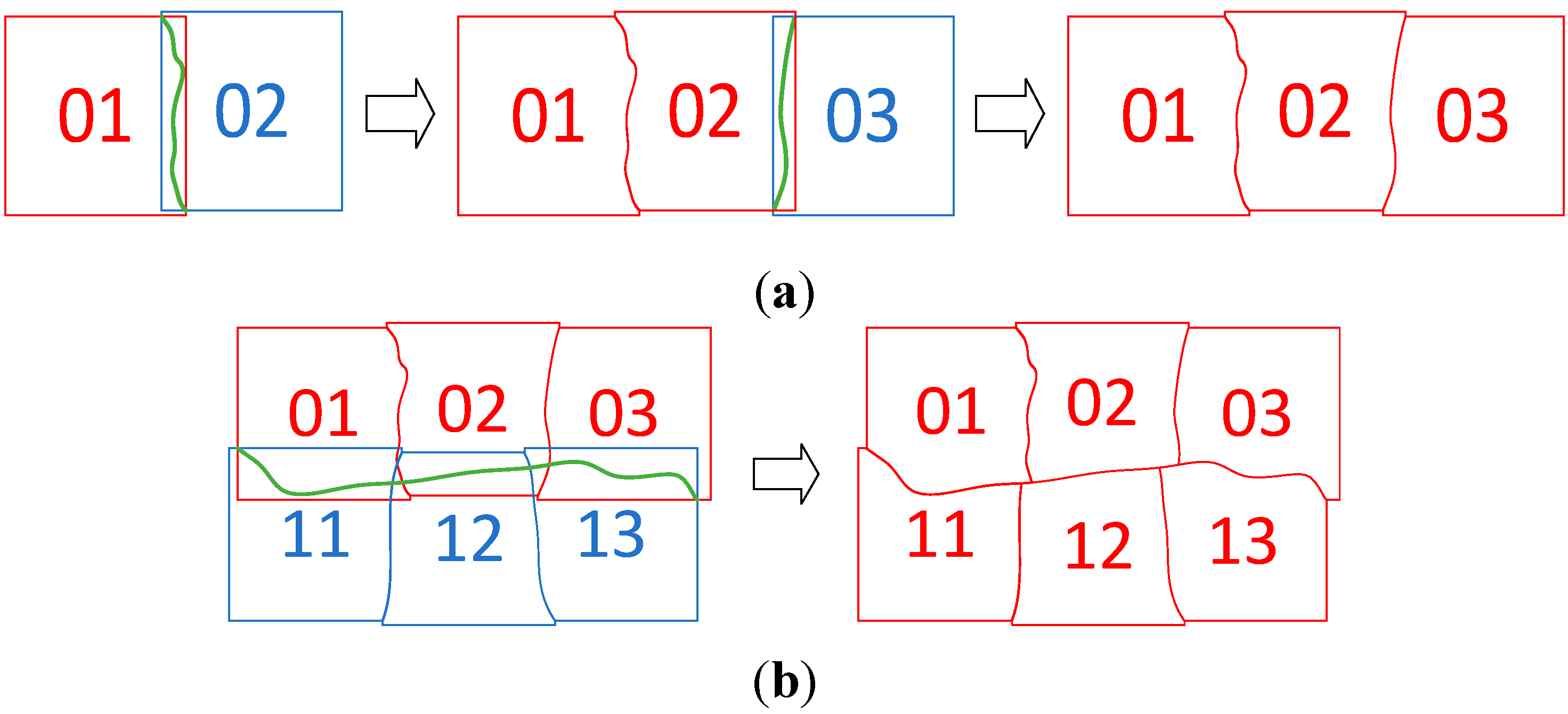
- According to the flight order, the seamline between each of two adjacent DOMs in one flight strip is selected successively. When the seamline between the first image and the adjacent image is determined, the two images are treated as a mosaic. If another image exists in the same strip, a new seamline is determined between the mosaic and the newly-added image, and a new mosaic with three images is obtained. Therefore, all of the images along the same strip are processed, and the EMPs for these images are determined.
- (2)
- With the use of the same method, the seamline between each two adjacent strips is selected according to the strip order. Every time a seamline between two strips is determined, the EMPs of all of the preprocessed images are updated with the newly-added seamline.

3. Experiments and Results
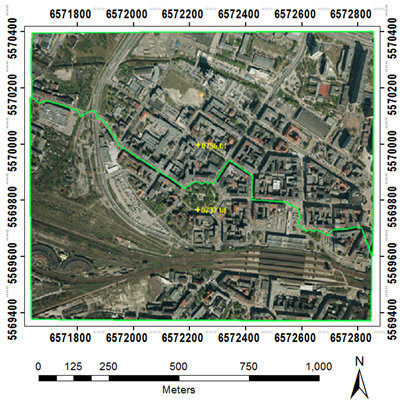
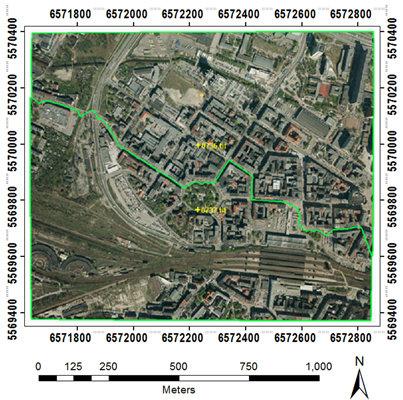
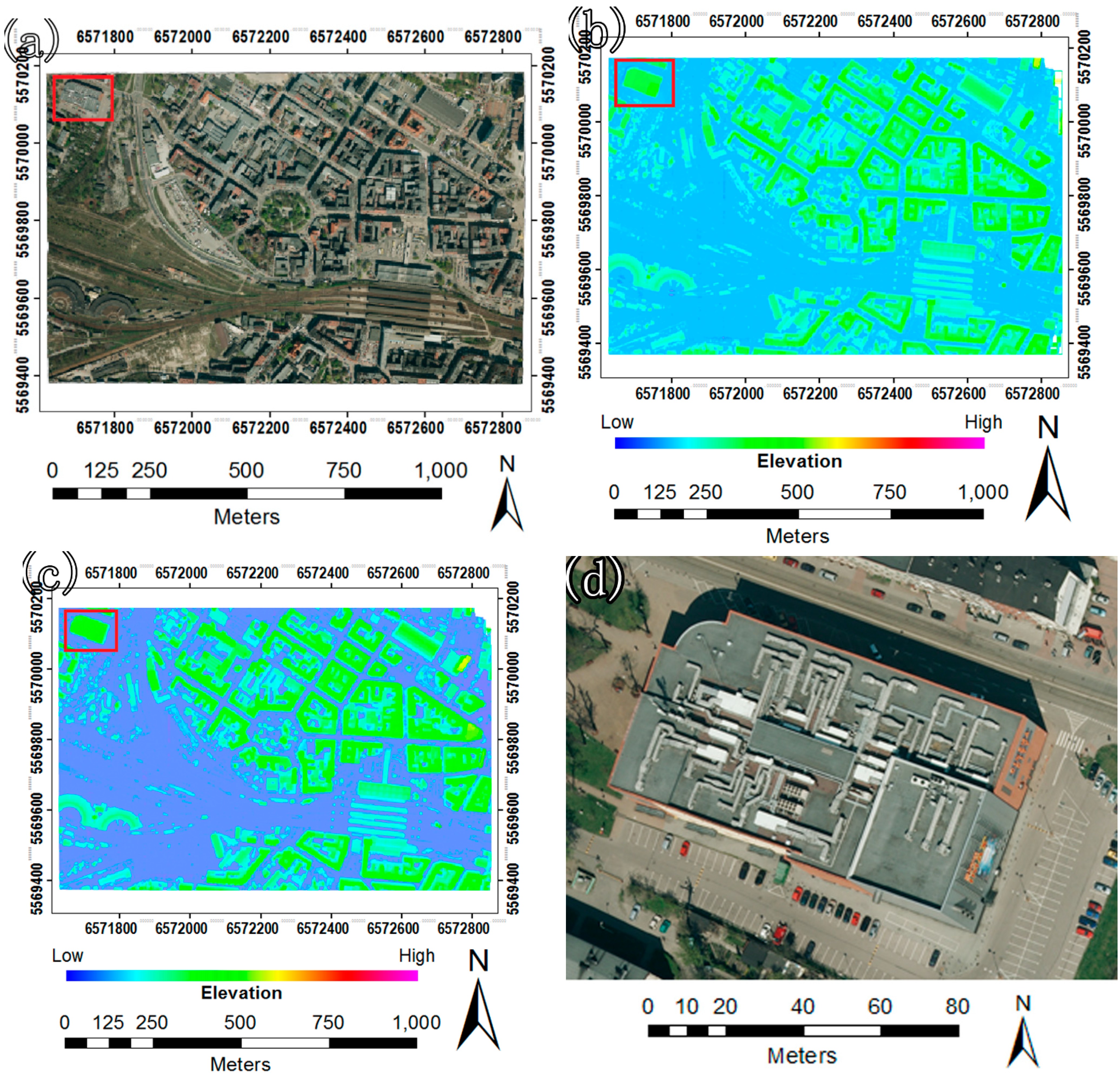
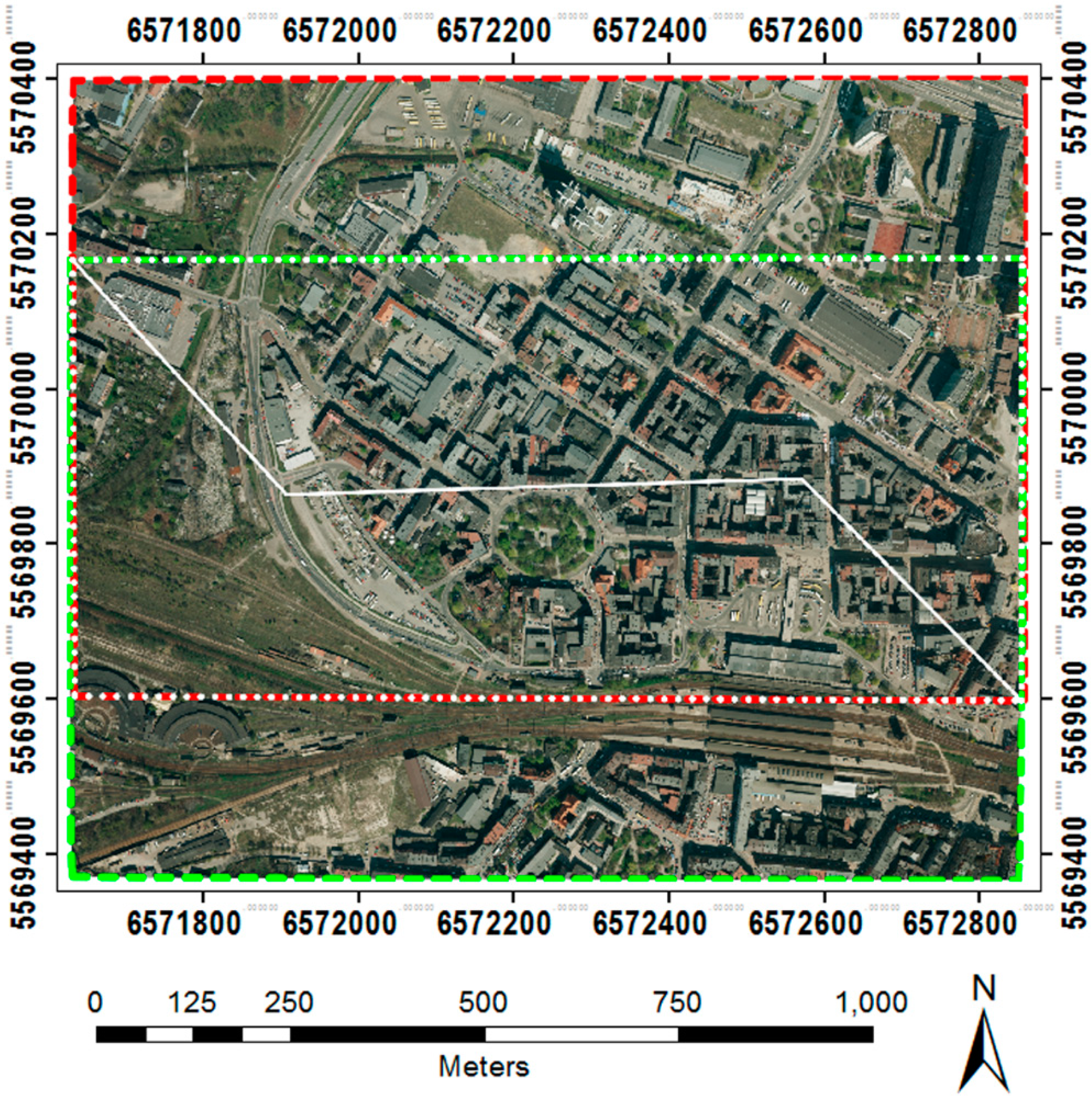
3.1. Data Preparation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset ID | Location | Camera | Focal Length | Flying Height | Forward Overlap | Side Lap | Resolution | Spectral Bands |
|---|---|---|---|---|---|---|---|---|
| 1 | Katowice | UltraCam X | 100.5 mm | 1200 m | 70% | 70% | 8 cm | R-G-B |
| 2 | Vaihingen | DMC | 120 mm | 900 m | 60% | 60% | 8 cm | IR-R-G |
| 3 | San Francisco | UltraCam D | 105.2 mm | 1800 m | 60% | 30% | 15 cm | R-G-B |
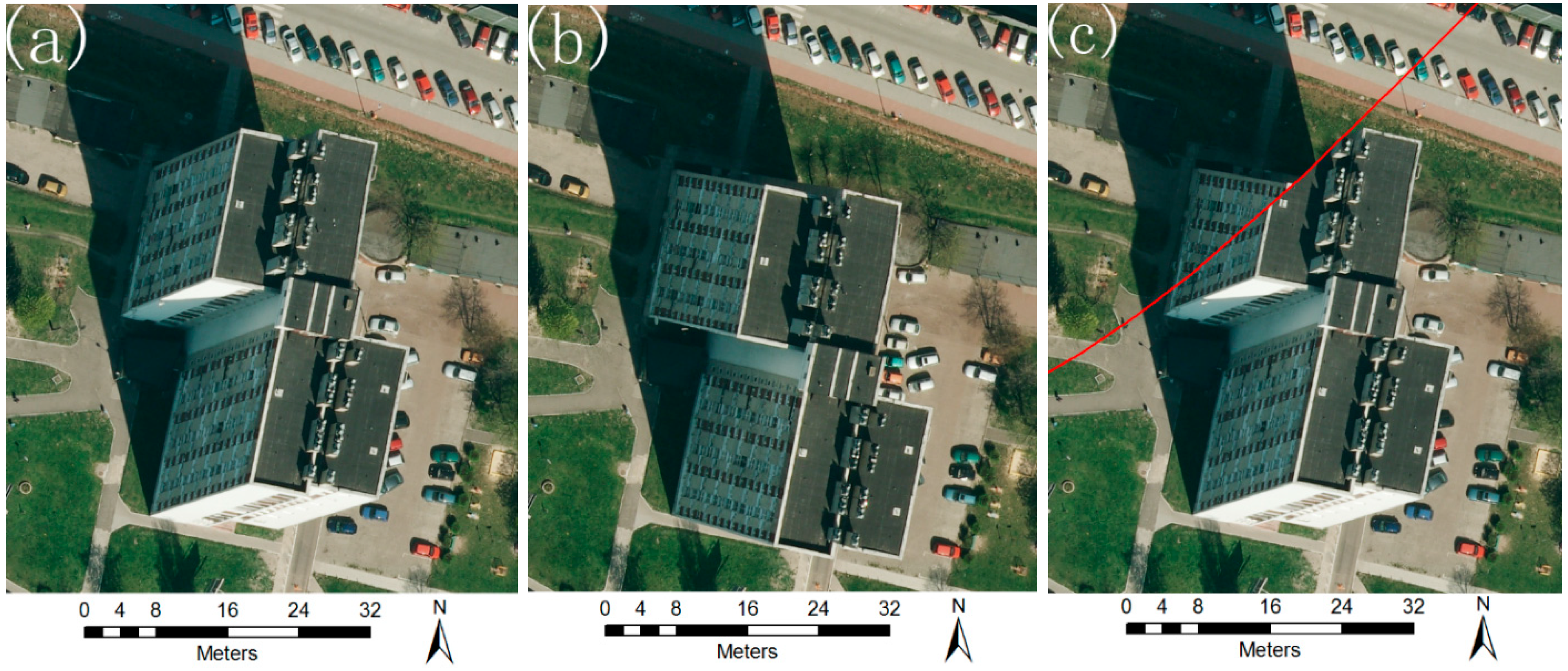
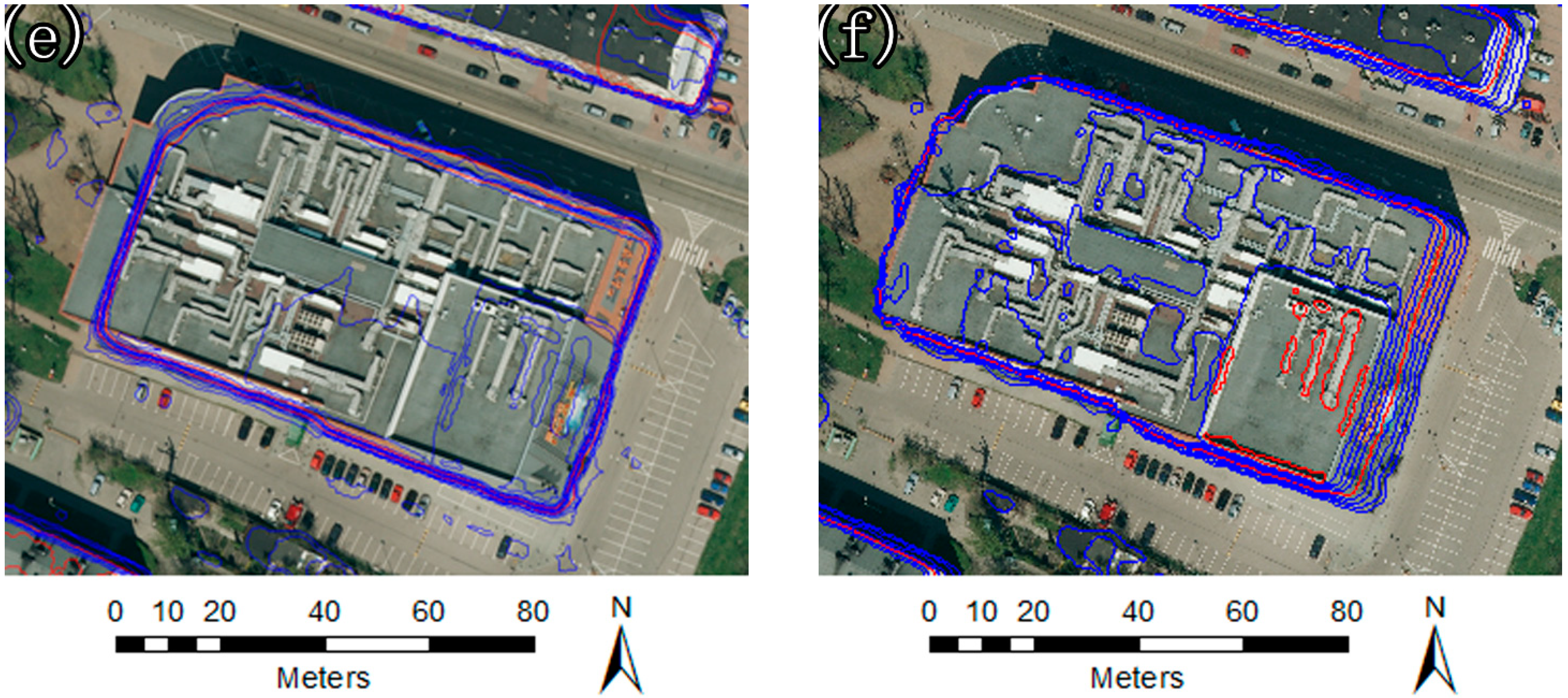
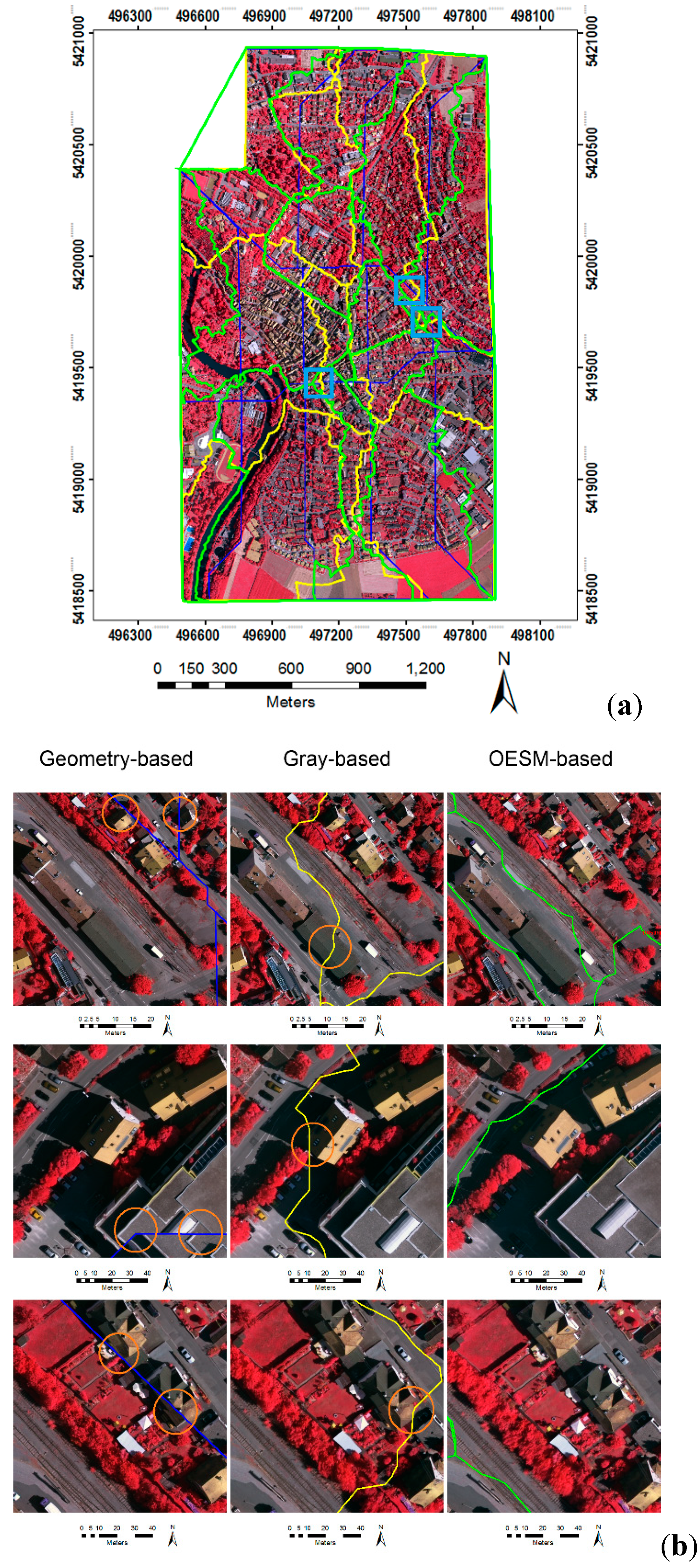
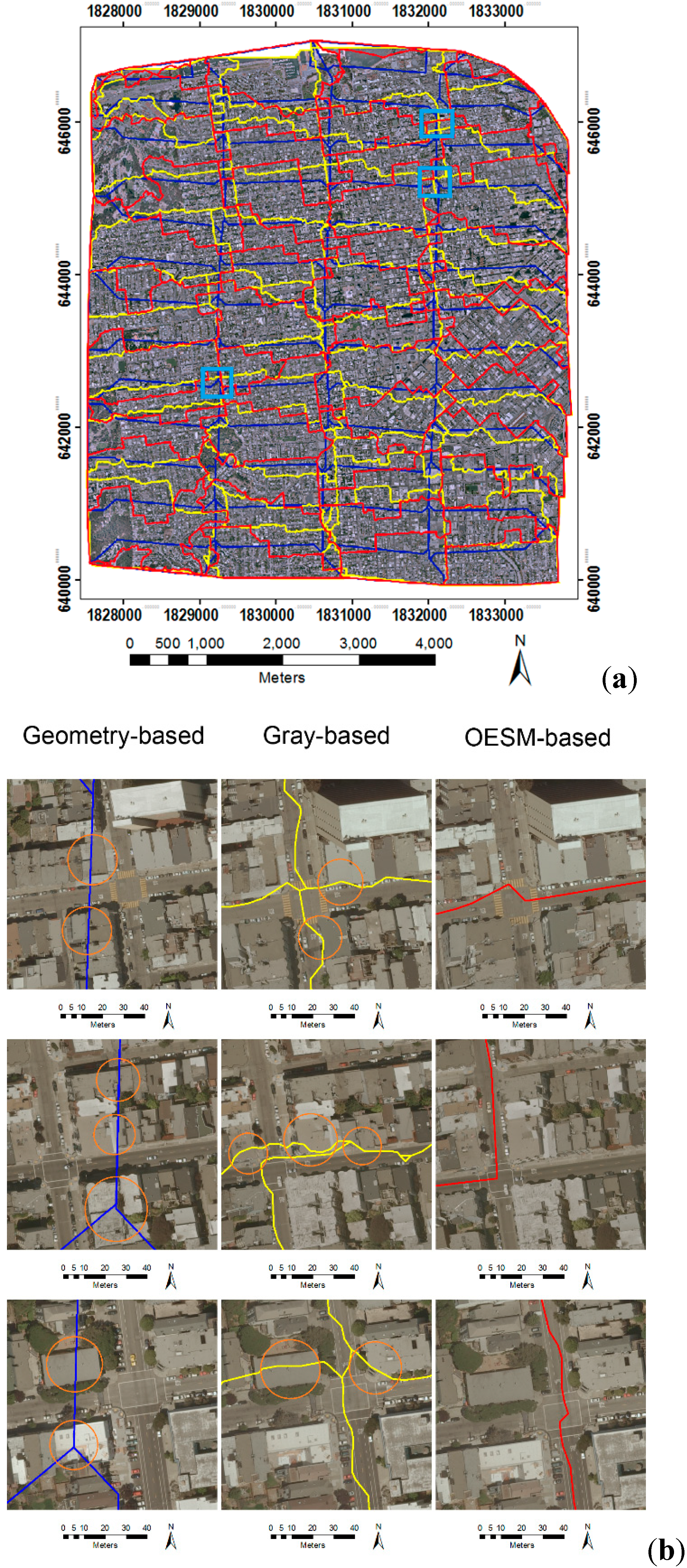
3.2. Evaluation and Comparison
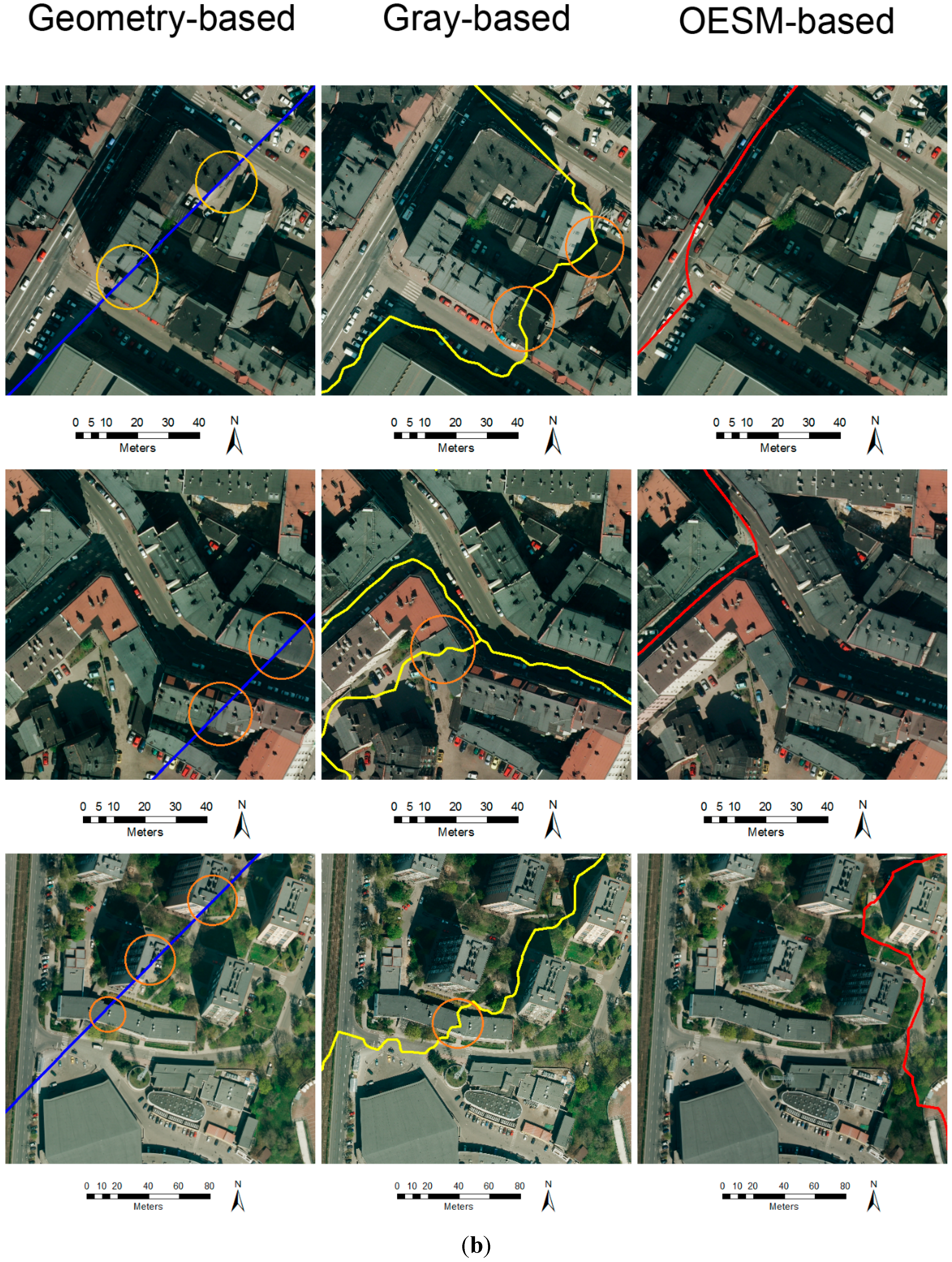
- (1)
- Without any optimization, the straight skeleton of the overlapping area was directly used as the seamline. In actual production, this method (or a similar method) is often used to generate an initial seamline network. Afterwards, manual editing is adopted on this basis.
- (2)
- Based on the image gray information, the seamline in the overlapping areas with minimal gray difference was selected. OrthoVista is one of the most powerful gray-based image mosaicking software; thus, the mosaicking function of the OrthoVista software [40] was adopted for comparison.
- (3)
- The proposed OESM method.




| Method | Number of Times the Seamlines Pass through Obvious Objects | Processing Time (s) | ||||
|---|---|---|---|---|---|---|
| Dataset 1 | Dataset 2 | Dataset 3 | Dataset 1 | Dataset 2 | Dataset 3 | |
| Geometry-based | 236 | 193 | Over 1500 | 47 | 20 | 80 |
| Gray-based | 26 | 24 | 325 | 2618 | 774 | 1718 |
| OESM-based | 9 | 15 | 80 | 1186 | 489 | 1375 |
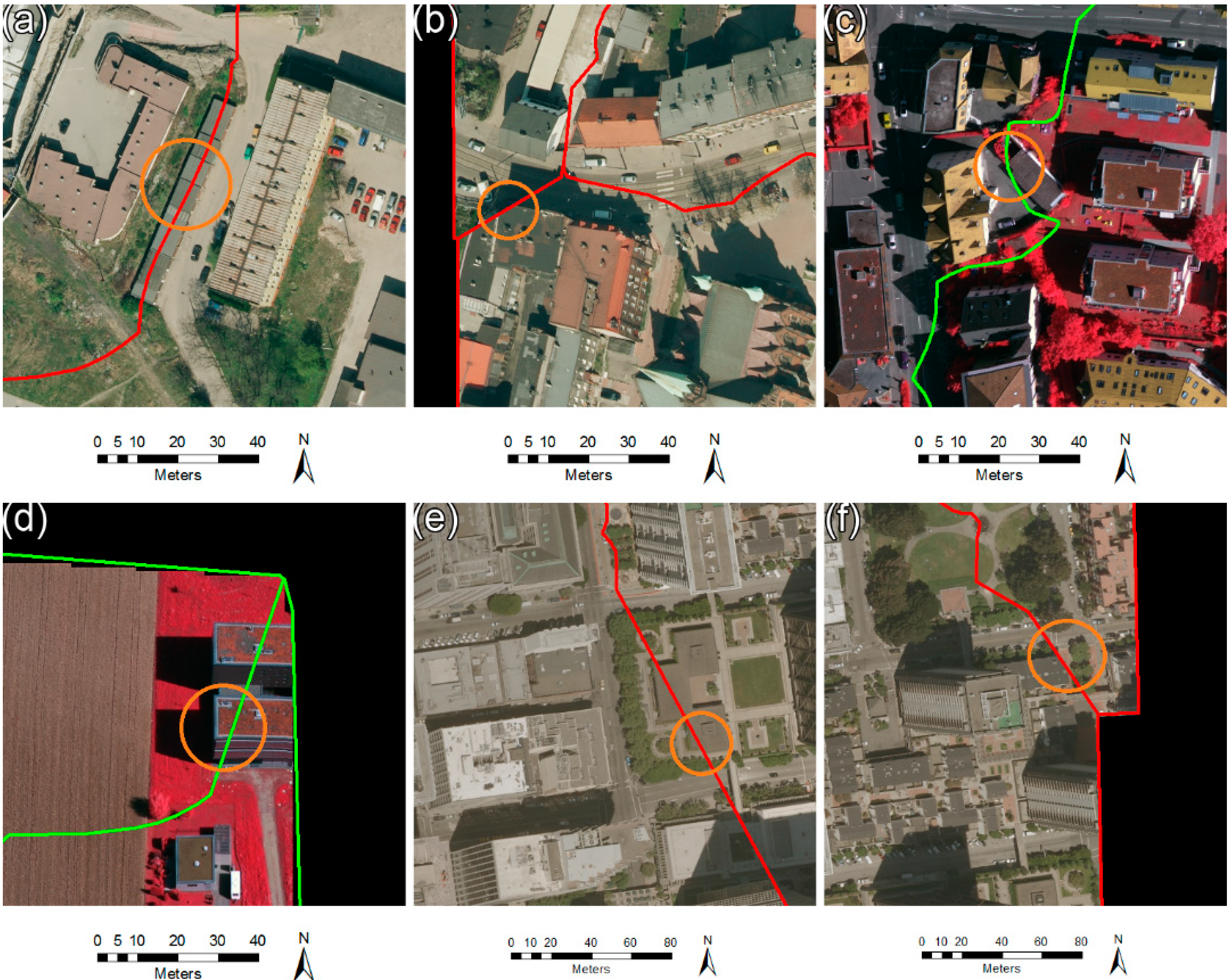
4. Discussion
4.1. Seamline Selection Strategy
4.2. Accuracies, Errors and Uncertainties

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Helmer, E.H.; Ruefenacht, B. Cloud-free satellite image mosaics with regression trees and histogram matching. Photogramm. Eng. Remote Sens. 2005, 71, 1079–1089. [Google Scholar] [CrossRef]
- Soille, P. Morphological image compositing. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 673–683. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Gao, Y.; Li, H.; Han, Y. An algorithm for remote sensing image mosaic based on valid area. In Proceedings of the IEEE International Symposium on Image and Data Fusion, Tengchong, Yunnan, China, 9–11 August 2011.
- Afek, Y.; Brand, A. Mosaicking of orthorectified aerial images. Photogramm. Eng. Remote Sens. 1998, 64, 115–124. [Google Scholar]
- Fernandez, E.; Garfinkel, R.; Arbiol, R. Mosaicking of aerial photographic maps via seams defined by bottleneck shortest paths. Oper. Res. 1998, 46, 293–304. [Google Scholar] [CrossRef]
- Fernández, E.; Martí, R. GRASP for seam drawing in mosaicking of aerial photographic maps. J. Heuristics 1999, 5, 181–197. [Google Scholar] [CrossRef]
- Botterill, T.; Mills, S.; Green, R. Real-time aerial image mosaicing. In Proceedings of the IEEE International Conference of Image and Vision Computing New Zealand, Queenstown, New Zealand, 8–9 November 2010.
- Zhou, G. Near real-time orthorectification and mosaic of small UAV video flow for time-critical event response. IEEE Trans. Geosci. Remote Sens. 2009, 47, 739–747. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, J.; Hao, L. Photogrammetric processing of low-altitude images acquired by unpiloted aerial vehicles. Photogramm. Rec. 2011, 26, 190–211. [Google Scholar] [CrossRef]
- Agarwala, A.; Dontcheva, M.; Agrawala, M.; Drucker, S.; Colburn, A.; Curless, B.; Salesin, D.; Cohen, M. Interactive digital photomontage. ACM Trans. Graph. 2004, 23, 294–302. [Google Scholar] [CrossRef]
- Kang, Z.; Zhang, L.; Zlatanova, S.; Li, J. An automatic mosaicking method for building facade texture mapping using a monocular close-range image sequence. ISPRS J. Photogramm. Remote Sens. 2010, 65, 282–293. [Google Scholar] [CrossRef]
- Mills, S.; McLeod, P. Global seamline networks for orthomosaic generation via local search. ISPRS J. Photogramm. Remote Sens. 2013, 75, 101–111. [Google Scholar] [CrossRef]
- Sun, M.W.; Zhang, J.Q. Dodging research for digital aerial images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 349–353. [Google Scholar]
- Zhou, G.; Chen, W.; Kelmelis, J.A.; Zhang, D. A comprehensive study on urban true orthorectification. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2138–2147. [Google Scholar] [CrossRef]
- Milgram, D.L. Computer methods for creating photomosaics. IEEE Trans. Comput. 1975, 24, 1113–1119. [Google Scholar] [CrossRef]
- Zomet, A.; Levin, A.; Peleg, S.; Weiss, Y. Seamless image stitching by minimizing false edges. IEEE Trans. Image Process. 2006, 15, 969–977. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.; Wang, M. A seam-line optimized method based on difference image and gradient image. In Proceedings of the International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011.
- Zhang, J.; Sun, M.; Zhang, Z. Automated Seamline Detection for Orthophoto Mosaicking Based on Ant Colony Algorithm. Geomat. Inf. Sci. Wuhan Univ. 2009, 6, 675–678. (In Chinese) [Google Scholar]
- Chon, J.; Kim, H.; Lin, C. Seam-line determination for image mosaicking: A technique minimizing the maximum local mismatch and the global cost. ISPRS J. Photogramm. Remote Sens. 2010, 65, 86–92. [Google Scholar] [CrossRef]
- Yu, L.; Holden, E.J.; Dentith, M.C.; Zhang, H. Towards the automatic selection of optimal seam line locations when merging optical remote sensing images. Int. J. Remote Sens. 2012, 33, 1000–1014. [Google Scholar] [CrossRef]
- Hsu, S.; Sawhney, H.S.; Kumar, R. Automated mosaics via topology inference. IEEE Comput. Graph. Appl. 2002, 22, 44–54. [Google Scholar] [CrossRef]
- Davis, J. Mosaics of scenes with moving objects. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Santa Barbara, CA, USA, 23–25 June 1998.
- Efros, A.; Freeman, W. Image quilting for texture synthesis and transfer. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 12–17 August 2011.
- Wan, Y.; Wang, D.; Xiao, J.; Wang, X.; Yu, Y.; Xu, J. Tracking of vector roads for the determination of seams in aerial image mosaics. IEEE Geosci. Remote Sens. Lett. 2012, 9, 328–332. [Google Scholar] [CrossRef]
- Pan, J.; Zhou, Q.; Wang, M. Seamline Determination Based on Segmentation for Urban Image Mosaicking. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1335–1339. [Google Scholar] [CrossRef]
- Kerschner, M. Seamline detection in colour orthoimage mosaicking by use of twin snakes. ISPRS J. Photogramm. Remote Sens. 2001, 56, 53–64. [Google Scholar] [CrossRef]
- Wan, Y.; Wang, D.; Xiao, J.; Lai, X.; Xu, J. Automatic determination of seamlines for aerial image mosaicking based on vector roads alone. ISPRS J. Photogramm. Remote Sens. 2013, 76, 1–10. [Google Scholar] [CrossRef]
- Pan, J.; Wang, M.; Li, D.; Li, J. Automatic generation of seamline network using area Voronoi diagrams with overlap. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1737–1744. [Google Scholar] [CrossRef]
- Ma, H.; Sun, J. Intelligent optimization of seam-line finding for orthophoto mosaicking with LiDAR point clouds. J. Zhejiang Univ. Sci. C 2011, 12, 417–429. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, J.; Hu, X. Measurable orthoimage elevation synchronous model and its application in mapping. Acta Geodaetica et Cartographica Sinica 2014, 43, 5–12. [Google Scholar]
- Sheng, Y. Theoretical analysis of the iterative photogrammetric method to determining ground coordinates from photo coordinates and a DEM. Photogramm. Eng. Remote Sens. 2005, 71, 863–871. [Google Scholar] [CrossRef]
- Amhar, F.; Jansa, J.; Ries, C. The generation of true orthophotos using a 3D building model in conjunction with a conventional DTM. In Proceedings of the International Archives of Photogrammetry and Remote Sensing, Stuttgart, Germany, 7–10 September 1998.
- Lee, D.T.; Schachter, B.J. Two algorithms for constructing a delaunay triangulation. Int. J. Comput. Inf. Sci. 1980, 9, 219–242. [Google Scholar] [CrossRef]
- Ghuneim, A.G. Contour Tracing. 2000. Available online: http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/contour_tracing_Abeer_George_Ghuneim/algorithm.html (accessed on 10 November 2014).
- Douglas, D.; Peuker, T. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar]
- Aichholzer, O.; Aurenhammer, F.; Alberts, D.; Gärtner, B. A novel type of skeleton for polygons. J. Univers. Comput. Sci. 1996, 752–761. [Google Scholar]
- Hilditch, C.J. Linear Skeletons from Square Cupboards. Mach. Intell. 1969, 4, 403–420. [Google Scholar]
- Hirschmüller, H. Stereo Processing by Semi-Global Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Sithole, G. Filtering of laser altimetry data using a slope adaptive filter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 203–210. [Google Scholar]
- Inpho GmbH and Stellacore Corp. Orthovista Direct. 2010. Available online: http://www.orthovista.com/ (accessed on 20 September 2014).
- Li, C.; Zhang, G.; Lei, T.; Gong, A. Quick image-processing method of UAV without control points data in earthquake disaster area. Trans. Nonferr. Met. Soc. China 2011, 21, 523–528. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Sun, M.; Hu, X.; Zhang, Z. Automatic Seamline Network Generation for Urban Orthophoto Mosaicking with the Use of a Digital Surface Model. Remote Sens. 2014, 6, 12334-12359. https://doi.org/10.3390/rs61212334
Chen Q, Sun M, Hu X, Zhang Z. Automatic Seamline Network Generation for Urban Orthophoto Mosaicking with the Use of a Digital Surface Model. Remote Sensing. 2014; 6(12):12334-12359. https://doi.org/10.3390/rs61212334
Chicago/Turabian StyleChen, Qi, Mingwei Sun, Xiangyun Hu, and Zuxun Zhang. 2014. "Automatic Seamline Network Generation for Urban Orthophoto Mosaicking with the Use of a Digital Surface Model" Remote Sensing 6, no. 12: 12334-12359. https://doi.org/10.3390/rs61212334