Improved van Zyl Polarimetric Decomposition Lessening the Overestimation of Volume Scattering Power



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Scattering Models
2.1. Helix Scattering Model
2.2. Volume Scattering Model
2.3. Ground Scattering Model
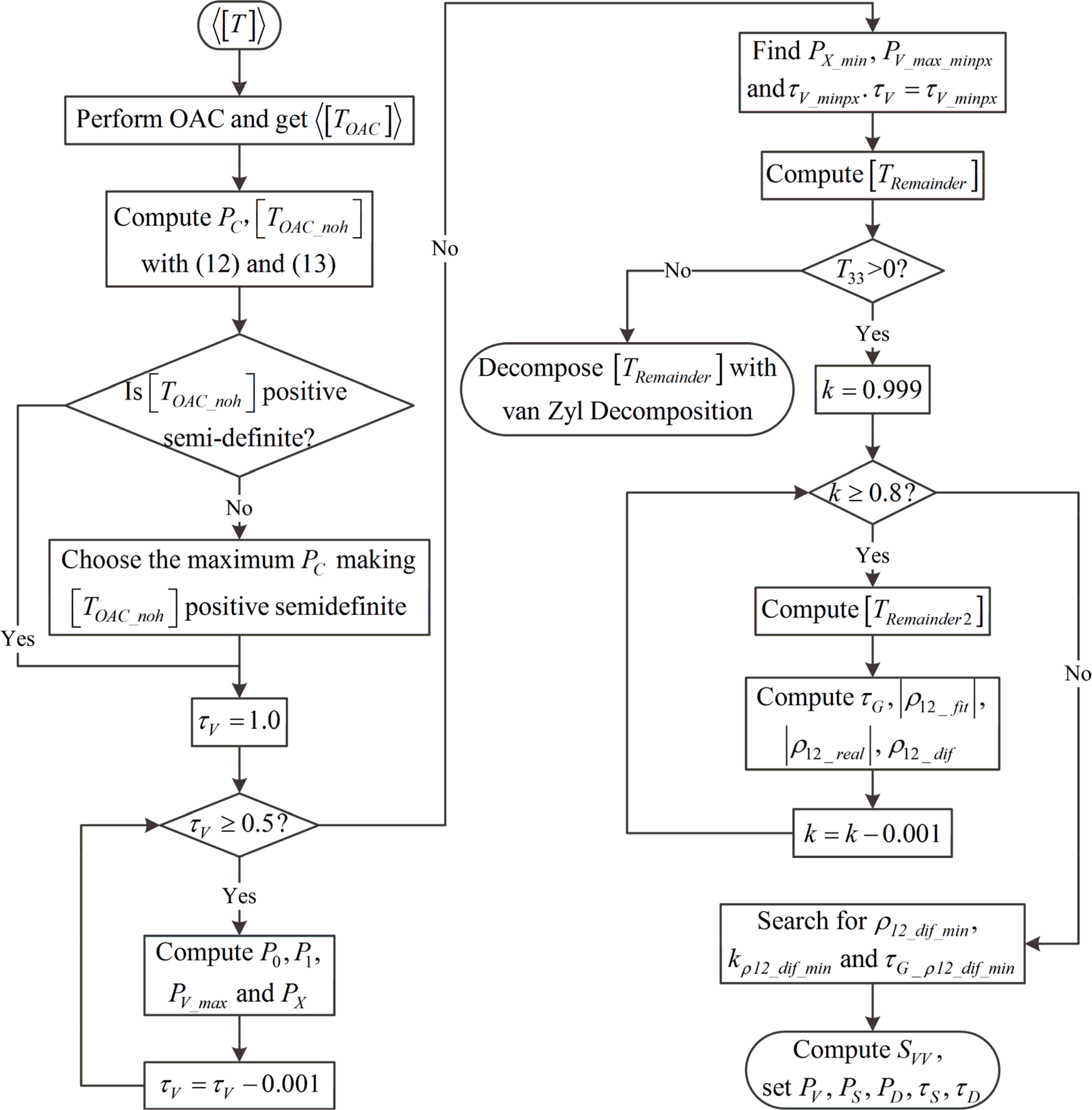
3. Polarimetric Decomposition
3.1. Orientation Angle Compensation
3.2. Helix Scattering Power Computation
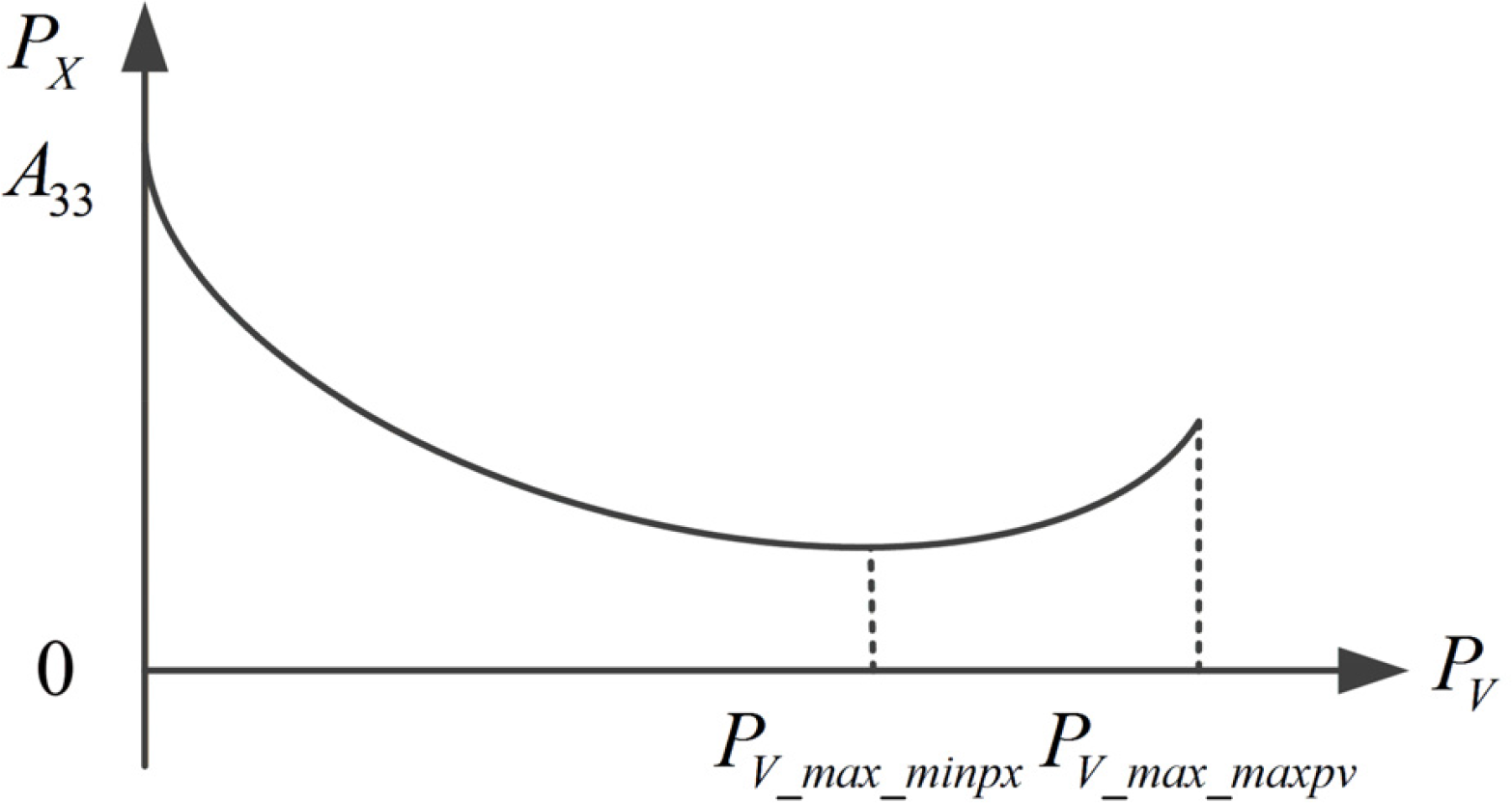
3.3. Volume Scattering Parameter Computation
3.4. Ground Scattering Solution
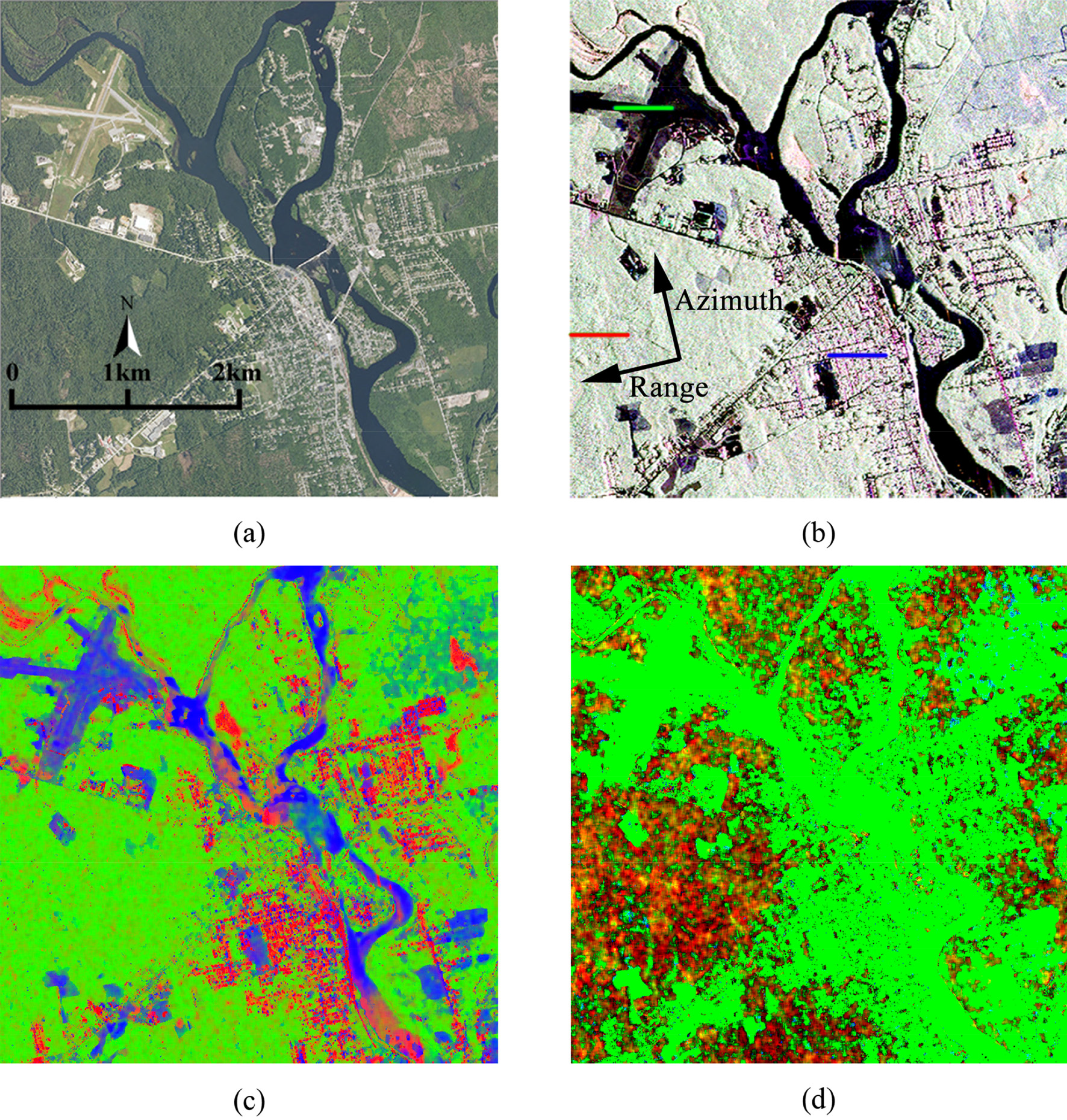
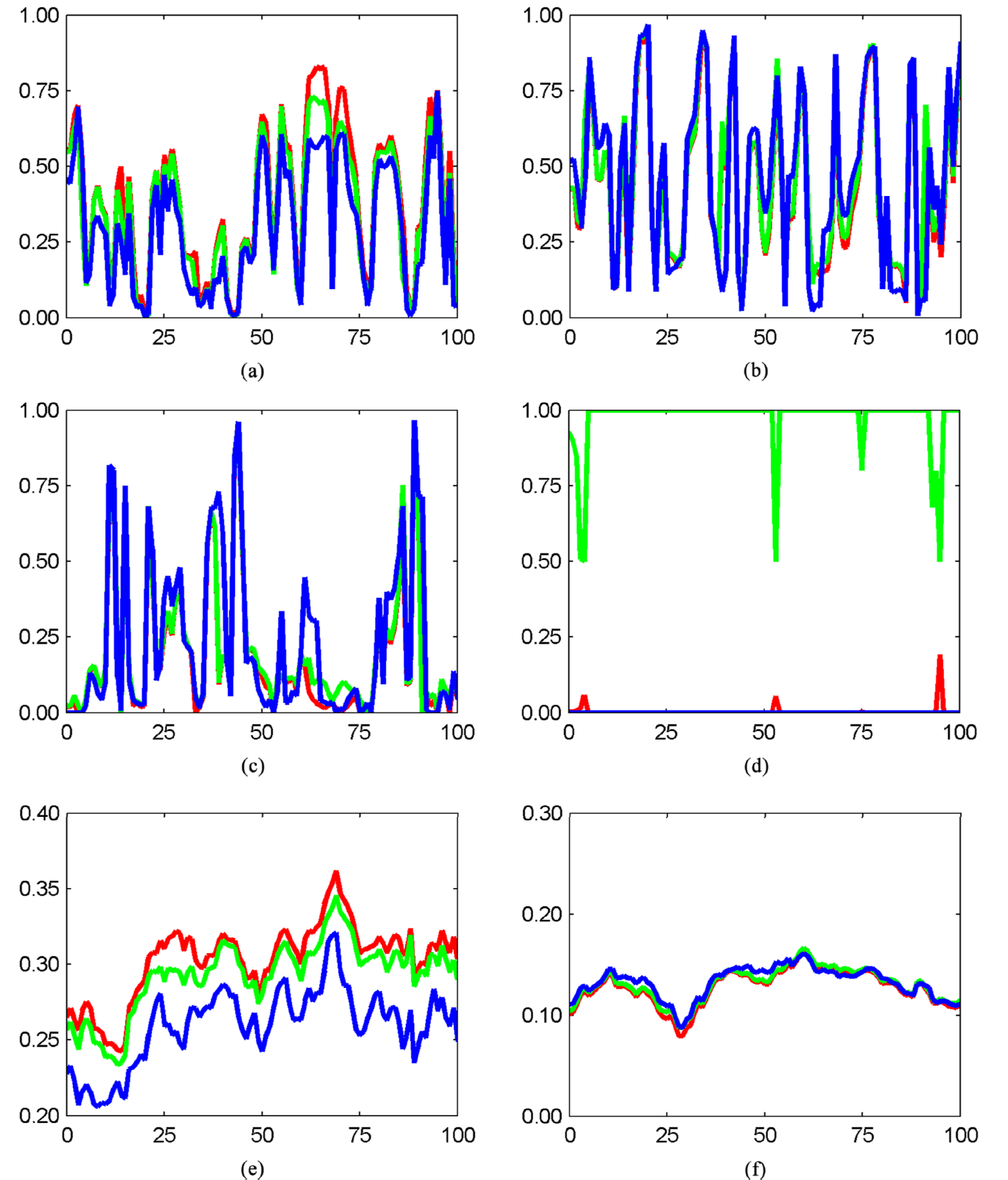
4. Experiment
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ouchi, K. Recent trend and advance of synthetic aperture radar with selected topics. Remote Sens 2013, 5, 716–807. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model to describe polarimetric SAR data. Proc. SPIE 1992, 1748, 213–225. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens 1998, 36, 963–973. [Google Scholar]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens 2005, 43, 1699–1706. [Google Scholar]
- An, W.; Cui, Y.; Yang, J. Three-component model-based decomposition for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens 2010, 48, 2732–2739. [Google Scholar]
- Arii, M.; van Zyl, J.J.; Kim, Y. Adaptive model-based decomposition of polarimetric SAR covariance matrices. IEEE Trans. Geosci. Remote Sens 2011, 49, 1104–1113. [Google Scholar]
- Van Zyl, J.J.; Arii, M.; Kim, Y. Model-based decomposition of polarimetric SAR covariance matrices constrained for nonnegative eigenvalues. IEEE Trans. Geosci. Remote Sens 2011, 49, 3452–3459. [Google Scholar]
- Cui, Y.; Yamaguchi, Y.; Yang, J.; Park, S.-E.; Kobayashi, H.; Singh, G. Three-component power decomposition for polarimetric SAR data based on adaptive volume scatter modeling. Remote Sens 2012, 4, 1559–1572. [Google Scholar]
- Singh, G.; Yamaguchi, Y.; Park, S.E. General four-component scattering power decomposition with unitary transformation of coherency matrix. IEEE Trans. Geosci. Remote Sens 2013, 51, 3014–3022. [Google Scholar]
- Singh, G.; Yamaguchi, Y.; Park, S.E.; Cui, Y.; Kobayashi, H. Hybrid freeman/eigenvalue decomposition method with extended volume scattering model. IEEE Geosci. Remote Sens. Lett 2013, 10, 81–85. [Google Scholar]
- Chen, S.-W.; Wang, X.-S.; Xiao, S.-P.; Sato, M. General polarimetric model-based decomposition for coherency matrix. IEEE Trans. Geosci. Remote Sens 2014, 52, 1843–1855. [Google Scholar]
- Cui, Y.; Yamaguchi, Y.; Yang, J.; Kobayashi, H.; Park, S.E.; Singh, G. On complete model-based decomposition of polarimetric SAR coherency matrix data. IEEE Trans. Geosci. Remote Sens 2014, 52, 1991–2001. [Google Scholar]
- Wang, C.; Yu, W.; Wang, R.; Deng, Y.; Zhao, F. Comparison of nonnegative eigenvalue decompositions with and without reflection symmetry assumptions. IEEE Trans. Geosci. Remote Sens 2014, 52, 2278–2287. [Google Scholar]
- Freeman, A. Fitting a two-component scattering model to polarimetric SAR data from forests. IEEE Trans. Geosci. Remote Sens 2007, 45, 2583–2592. [Google Scholar]
- Jong-Sen, L.; Ainsworth, T.L.; Yanting, W. Generalized polarimetric model-based decompositions using incoherent scattering models. IEEE Trans. Geosci. Remote Sens 2014, 52, 2474–2491. [Google Scholar]
- Antropov, O.; Rauste, Y.; Hame, T. Volume scattering modeling in POLSAR decompositions: Study of ALOS PALSAR data over boreal forest. IEEE Trans. Geosci. Remote Sens 2011, 49, 3838–3848. [Google Scholar]
- Da Silva, A.; Paradella, W.; Freitas, C.; Oliveira, C. Evaluation of digital classification of polarimetric SAR data for iron-mineralized laterites mapping in the amazon region. Remote Sens 2013, 5, 3101–3122. [Google Scholar]
- Lönnqvist, A.; Rauste, Y.; Molinier, M.; Häme, T. Polarimetric SAR data in land cover mapping in boreal zone. IEEE Trans. Geosci. Remote Sens 2010, 48, 3652–3662. [Google Scholar]
- Lardeux, C.; Frison, P.L.; Tison, C.; Souyris, J.C.; Stoll, B.; Fruneau, B.; Rudant, J.P. Support vector machine for multifrequency SAR polarimetric data classification. IEEE Trans. Geosci. Remote Sens 2009, 47, 4143–4152. [Google Scholar]
- Lee, J.-S.; Grunes, M.R.; Pottier, E.; Ferro-Famil, L. Unsupervised terrain classification preserving polarimetric scattering characteristics. IEEE Trans. Geosci. Remote Sens 2004, 42, 722–731. [Google Scholar]
- Qi, Z.; Yeh, A.G.-O.; Li, X.; Lin, Z. A novel algorithm for land use and land cover classification using RADARSAT-2 polarimetric SAR data. Remote Sens. Environ 2012, 118, 21–39. [Google Scholar]
- Lee, J.-S.; Grunes, M.R.; Schuler, D.L.; Pottier, E.; Ferro-Famil, L. Scattering-model-based speckle filtering of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens 2006, 44, 176–187. [Google Scholar]
- Ballester-Berman, J.D.; Lopez-Sanchez, J.M. Applying the freeman-durden decomposition concept to polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens 2010, 48, 466–479. [Google Scholar]
- Yajima, Y.; Yamaguchi, Y.; Sato, R.; Yamada, H.; Boerner, W.-M. Polsar image analysis of wetlands using a modified four-component scattering power decomposition. IEEE Trans. Geosci. Remote Sens 2008, 46, 1667–1673. [Google Scholar]
- Shi, J.; Lee, J.-S.; Chen, K.; Sun, Q. Evaluate usage of decomposition technique in estimation of soil moisture with vegetated surface by multi-temporal measurements. Proceedings of the 2000 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2000; 3, pp. 1098–1100.
- Hajnsek, I.; Jagdhuber, T.; Schön, H.; Papathanassiou, K.P. Potential of estimating soil moisture under vegetation cover by means of POLSAR. IEEE Trans. Geosci. Remote Sens 2009, 47, 442–454. [Google Scholar]
- Jagdhuber, T.; Schön, H.; Hajnsek, I.; Papathanassiou, K.P. Soil moisture estimation under vegetation applying polarimetric decomposition techniques. In Proceedings of the 4th International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry, Frascati, Italy, 26–30 January 2009; ESA: Frascati, Italy, 2009. pp. 1–8.
- Tello, M.; López-Martínez, C.; Mallorqui, J.J. A novel algorithm for ship detection in SAR imagery based on the wavelet transform. IEEE Geosci. Remote Sens. Lett 2005, 2, 201–205. [Google Scholar]
- Sato, R.; Takahashi, Y.; Yamaguchi, Y.; Yamada, H. stricken man-made object detection using scattering power decomposition with NNED and rotation of the covariance matrix. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5121–5124.
- Yonezawa, C.; Watanabe, M.; Saito, G. Polarimetric decomposition analysis of ALOS PALSAR observation data before and after a landslide event. Remote Sens 2012, 4, 2314–2328. [Google Scholar]
- Arii, M.; van Zyl, J.J.; Kim, Y. A general characterization for polarimetric scattering from vegetation canopies. IEEE Trans. Geosci. Remote Sens 2010, 48, 3349–3357. [Google Scholar]
- Neumann, M. Remote Sensing of Vegetation Using Multi-Baseline Polarimetric Sar Interferometry: Theoretical Modeling and Physical Parameter Retrieval.
- Lee, J.-S.; Ainsworth, T.L. The effect of orientation angle compensation on coherency matrix and polarimetric target decompositions. IEEE Trans. Geosci. Remote Sens 2011, 49, 53–64. [Google Scholar]
- Chen, S.-W.; Ohki, M.; Shimada, M.; Sato, M. Deorientation effect investigation for model-based decomposition over oriented built-up areas. IEEE Geosci. Remote Sens. Lett 2013, 10, 273–277. [Google Scholar]
- Neumann, M.; Ferro-Famil, L.; Pottier, E. A. General model based polarimetric decomposition scheme for vegetated areas. Proceedings of the 4th International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry (ESRIN), Frascati, Italy, 26–30 January 2009.
- Cheng, X.; Huang, W.; Gong, J. An unsupervised scattering mechanism classification method for polsar images. IEEE Geosci. Remote Sens. Lett 2014, 11, 1677–1681. [Google Scholar]
- Cheng, X.; Huang, W.; Gong, J. A decomposition-free scattering mechanism classification method for PoLSAR images with Neumann’s model. Remote Sens. Lett 2013, 4, 1176–1184. [Google Scholar]
- Cheng, X. Research of Model-Based Polarimetric Sar Decomposition Constrained for Nonnegative Eigenvalues.
- Rosen, P.A.; Hensley, S.; Wheeler, K.; Sadowy, G.; Miller, T.; Shaffer, S.; Muellerschoen, R.; Jones, C.; Zebker, H.; Madsen, S. UAVSAR: A new NASA Airborne SAR system for science and technology research. Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 22–29.
- UAVSAR-Home. Available online: http://uavsar.jpl.nasa.gov/instrument.html (accessed on 4 September 2013).
- Vertex: ASF’s Data Portal. Available online: https://vertex.daac.asf.alaska.edu (accessed on 1 May 2012).
- Lee, J.-S.; Wen, J.-H.; Ainsworth, T.L.; Chen, K.-S.; Chen, A.J. Improved sigma filter for speckle filtering of SAR imagery. IEEE Trans. Geosci. Remote Sens 2009, 47, 202–213. [Google Scholar]
- Cheng, X.; Pinto, N.; Gong, J. Terrain radiometric calibration of airborne UAVSAR for forested area. Geo-Spat. Inf. Sci 2012, 15, 229–240. [Google Scholar]
Appendix







© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Cheng, X.; Huang, W.; Gong, J. Improved van Zyl Polarimetric Decomposition Lessening the Overestimation of Volume Scattering Power. Remote Sens. 2014, 6, 6365-6385. https://doi.org/10.3390/rs6076365
Cheng X, Huang W, Gong J. Improved van Zyl Polarimetric Decomposition Lessening the Overestimation of Volume Scattering Power. Remote Sensing. 2014; 6(7):6365-6385. https://doi.org/10.3390/rs6076365
Chicago/Turabian StyleCheng, Xiaoguang, Wenli Huang, and Jianya Gong. 2014. "Improved van Zyl Polarimetric Decomposition Lessening the Overestimation of Volume Scattering Power" Remote Sensing 6, no. 7: 6365-6385. https://doi.org/10.3390/rs6076365
APA StyleCheng, X., Huang, W., & Gong, J. (2014). Improved van Zyl Polarimetric Decomposition Lessening the Overestimation of Volume Scattering Power. Remote Sensing, 6(7), 6365-6385. https://doi.org/10.3390/rs6076365