
Provenance Information Representation and Tracking for Remote Sensing Observations in a Sensor Web Enabled Environment


Abstract
:1. Introduction
- (1)
- We propose a method for representing and tracking provenance information in the Sensor Web enabled environment for remote sensing applications.
- (2)
- We tested this method by applying it to vegetation condition applications.
2. Provenance Method
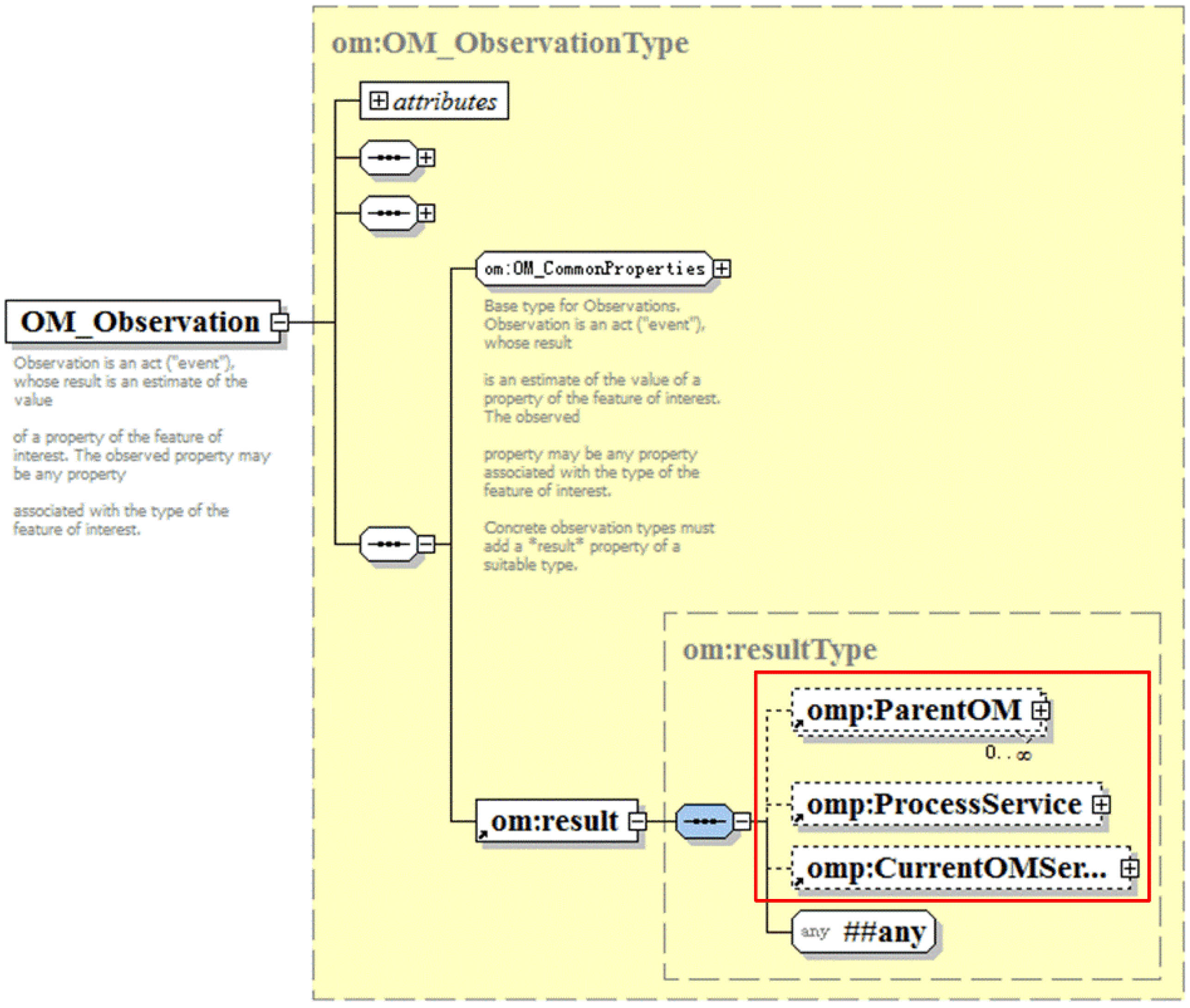
2.1. Description Model


2.2. Encoding Method




2.3. Service Implementation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Service Name | Operation Name | Input Parameters | Output Parameters |
|---|---|---|---|
| SOS | GetObservation | any parameters that can be O&M and also cannot be O&M | O&M |
| SOS | InsertObservation | O&M | SOS response |
| SPS | Submit | any parameters that can be O&M and also cannot be O&M | Can generate an O&M Output for DescribeResultAccess operation exposing |
| WPS | Execute | May include O&M | Can be O&M |
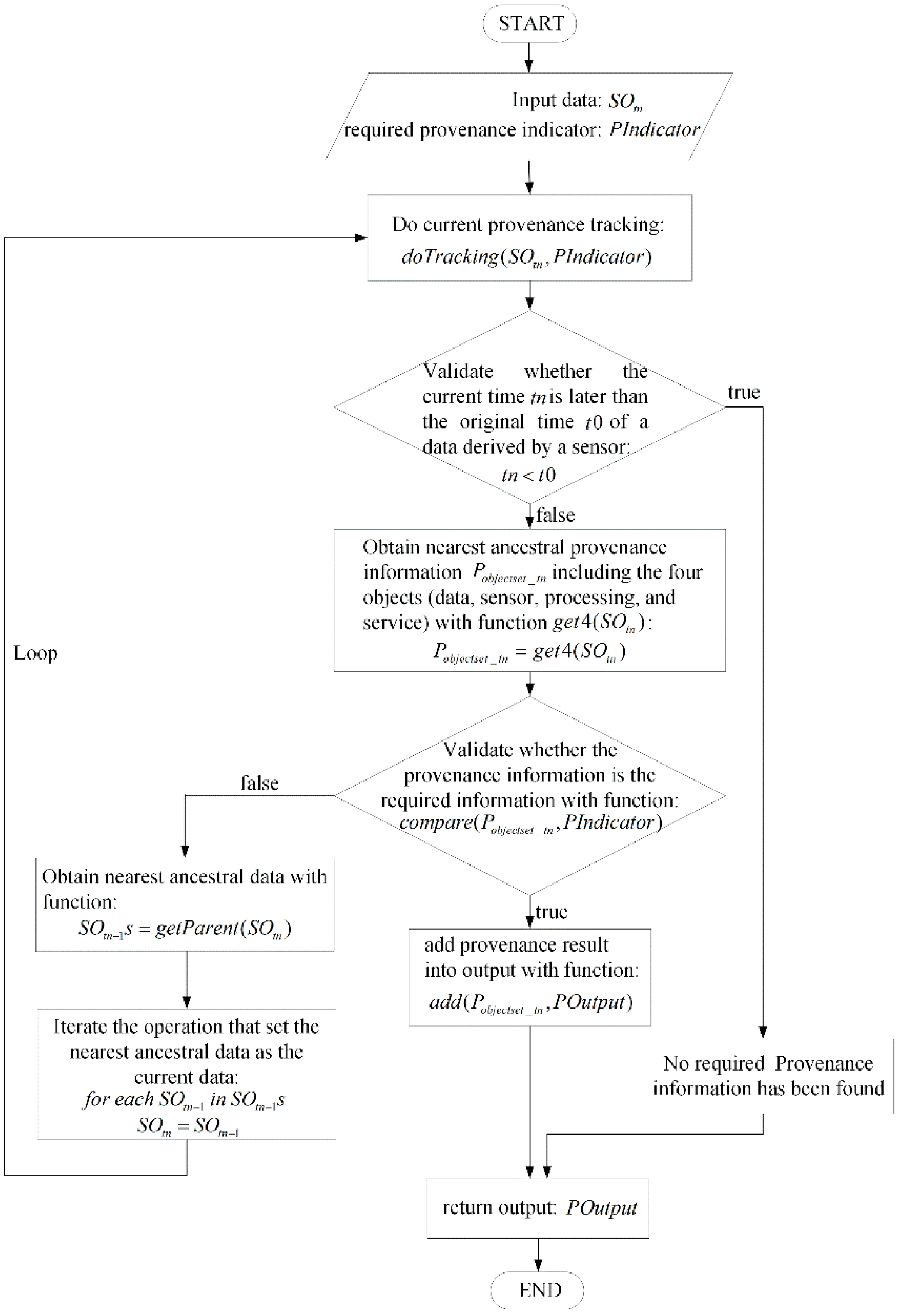
2.4. Tracking Algorithm

| Algorithm 1: Abstract tracking algorithm |
| Input: current status observation SOtn required provenance information indicator PIndicator |
| Output: provenance result POutput indicated by PIndicator Use:
STEP 1: Start tracking using the function . STEP 2: Validate that the current observation time (tn) occurs before the initial time of the sensor t0(tn < t0). If this is true, the correct result cannot be found, even at the initial observation, and we return a “not found” exception. If it is false, we proceed to the next step. STEP 3: Obtain the set of four objects () from SOtn using the function get4(SOtn). The implementation of is based on the encoding method of the provenance model in SOtn. STEP 4: Compare the provenance objects from PIndicator with the objects in using . The function will return true if the objects in are in , and then the result is added to the output () using ). Otherwise, we obtain the latest historical observations (parent observations), using and proceed to the next step. The observations for each in comprise the current observation set. STEP 5: Reset each in as and invoke . If and its recursive functions are finished, return the provenance result, . |
| Algorithm 2: Tracking historical data |
| Input: current status observation SOtn required provenance information indicator PIndicator = Pdata tm |
| Output: historical data Pdata tm Annotation: Algorithm 2 is an implementation of Algorithm 1. The steps are the same as in Algorithm 1, and we define the necessary functions as follows. For get4(SOtn), SOtn is an O&M. The O&M embeds the four objects of the provenance model and thus returns SOtn. returns true if the times match. Otherwise, it returns false. directly adds Pdata tn to , where Pdata tn is obtained from the child element of //result/om:OM_Observation/result. executes the following steps.
|
| Algorithm 3: Tracking processing objects |
| Input: current status observation required provenance information indicator |
| Output: processing object Annotation: Algorithm 3 is an implementation of Algorithm 1. The steps are the same as Algorithm 1, and we define two specific functions as follows. returns true if the times match. Otherwise, it returns false. executes the following steps.
|
| Algorithm 4: Tracking service objects |
| Input: current status observation required provenance information indicator |
| Output: service object Annotation: Algorithm 4 is an implementation of Algorithm 1. The steps of Algorithm 4 are the same as Algorithm 1, and we define two specific functions. returns true if the times match. Otherwise, it returns false. executes the following steps.
|
| Algorithm 5: Tracking sensor objects |
| Input: current status observation required provenance information indicator |
| Output: sensor object Annotation: Algorithm 5 is an implementation of Algorithm 1. The steps of Algorithm 5 are the same as Algorithm 1, and we define two specific functions. returns true if the times match. Otherwise, it returns false. executes the following steps.
|
3. Experimental Section
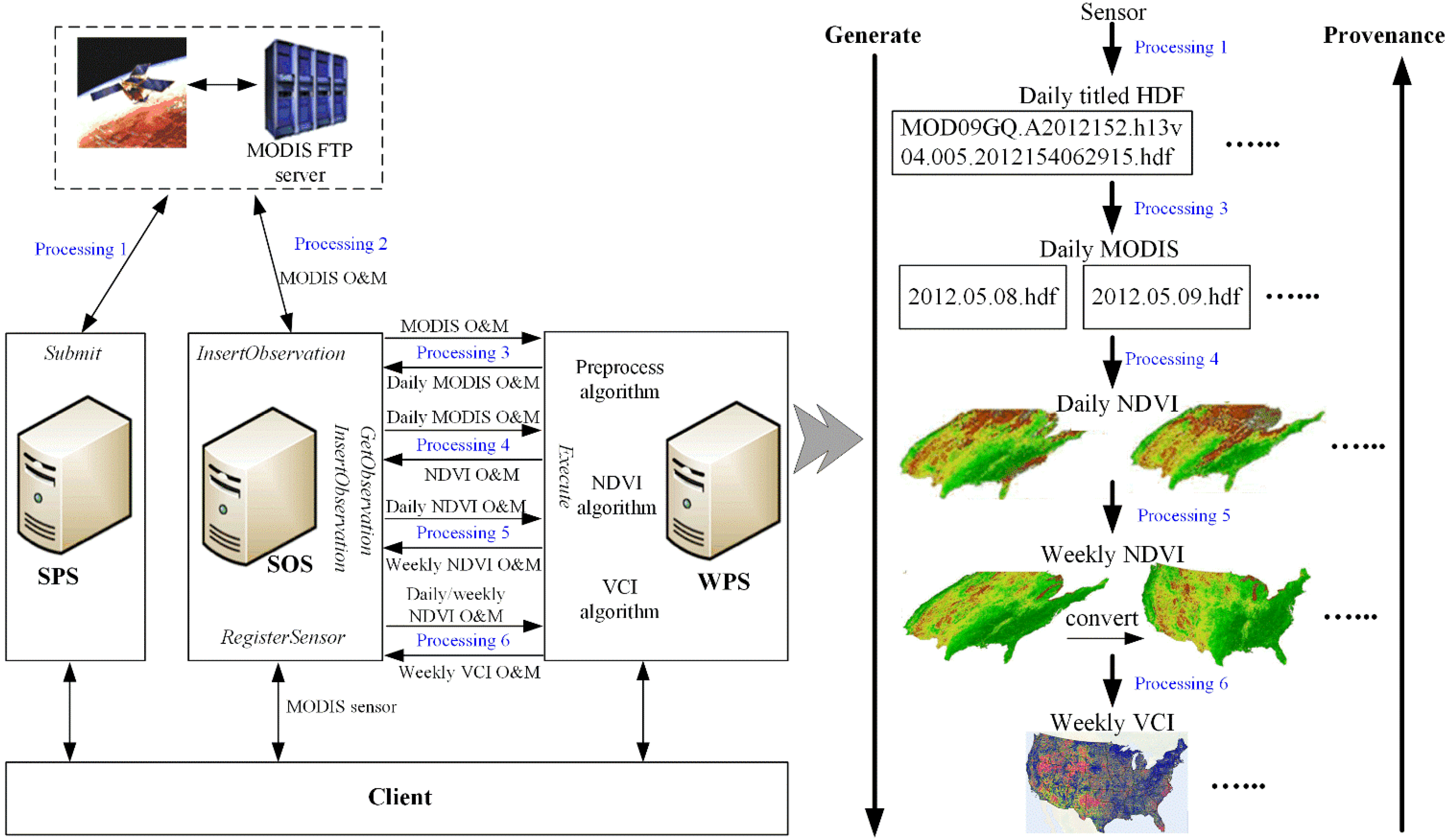
3.1. Experiment Design

3.2. Experiment Results and Discussion
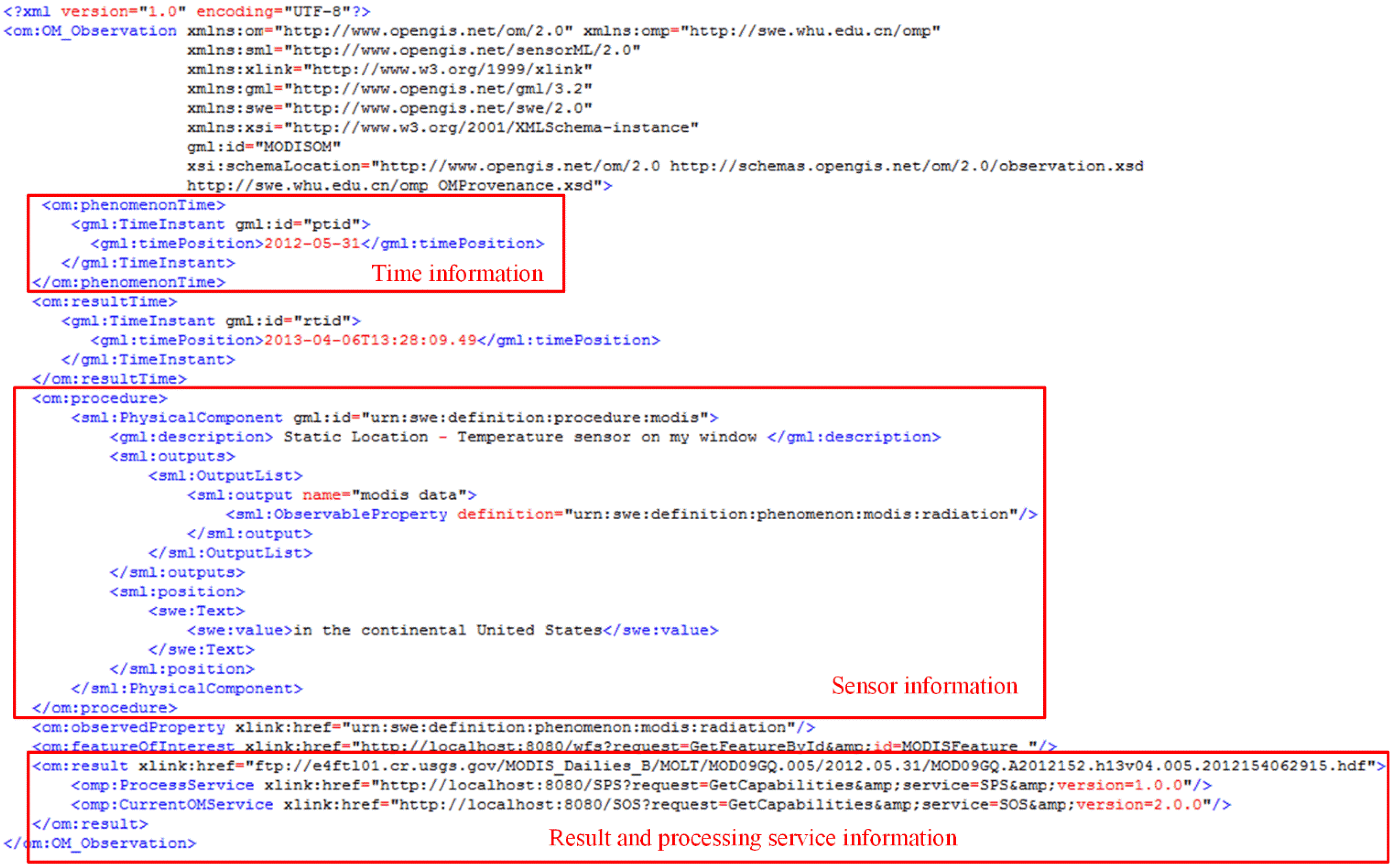
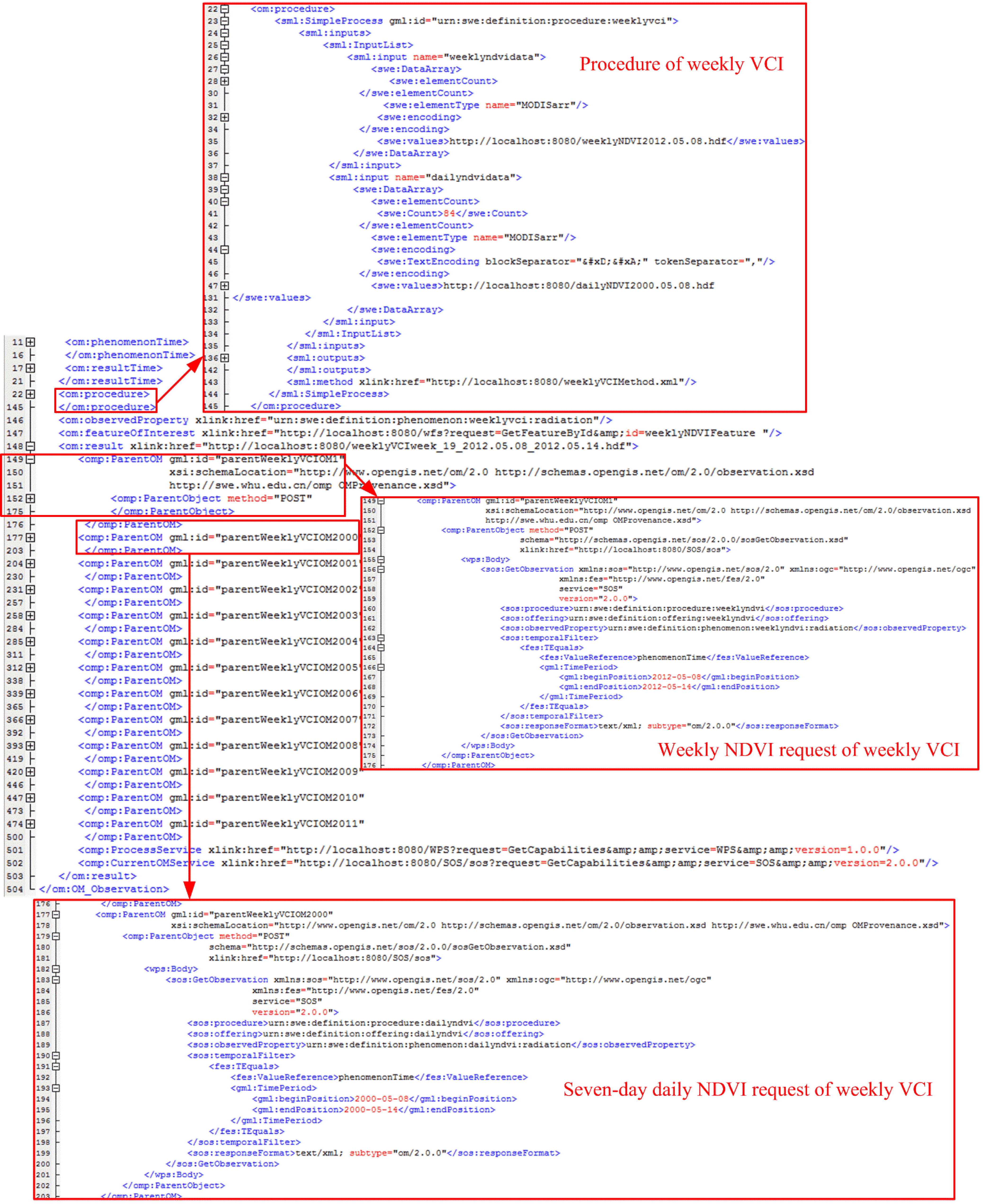
3.2.1. Representation of the Provenance Model in O&M



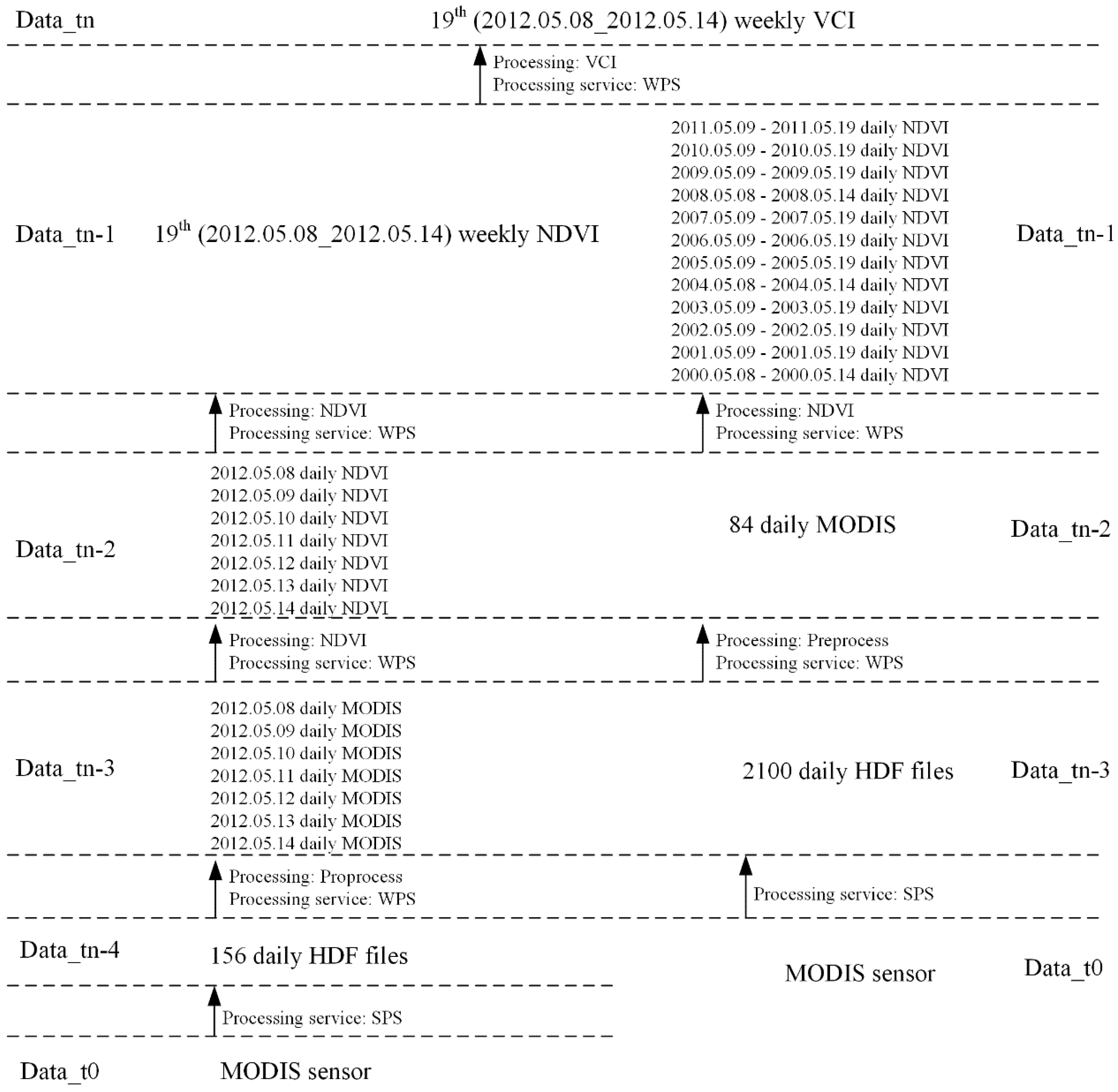
3.2.2. Tracking Objects with the Tracking Algorithm from O&M

3.2.3. Performance Analysis

4. Discussion and Conclusions
- The proposed provenance representation model is a Sensor Web, domain-specific model. Compared with provenance studies in terms of database, workflow, Web, international specification, and distributed system methods, the work of this paper mainly focused on a provenance representation that can be integrated with Sensor Web specifications. The provenance model was integrated into the Sensor Web specifications without affecting the structures, semantic relationships, and framework. We proposed a provenance model and a tracking approach, but did not consider the implementation, which is left to a developer.
- The designed provenance method can represent and track provenance information for remote sensing observations in a Sensor Web enabled environment. We conducted an experiment to test the representation and tracking in terms of the sensor, processing, data, and service objects, considering vegetation conditions represented by the NDVI and VCI for May from 2000 to 2012.
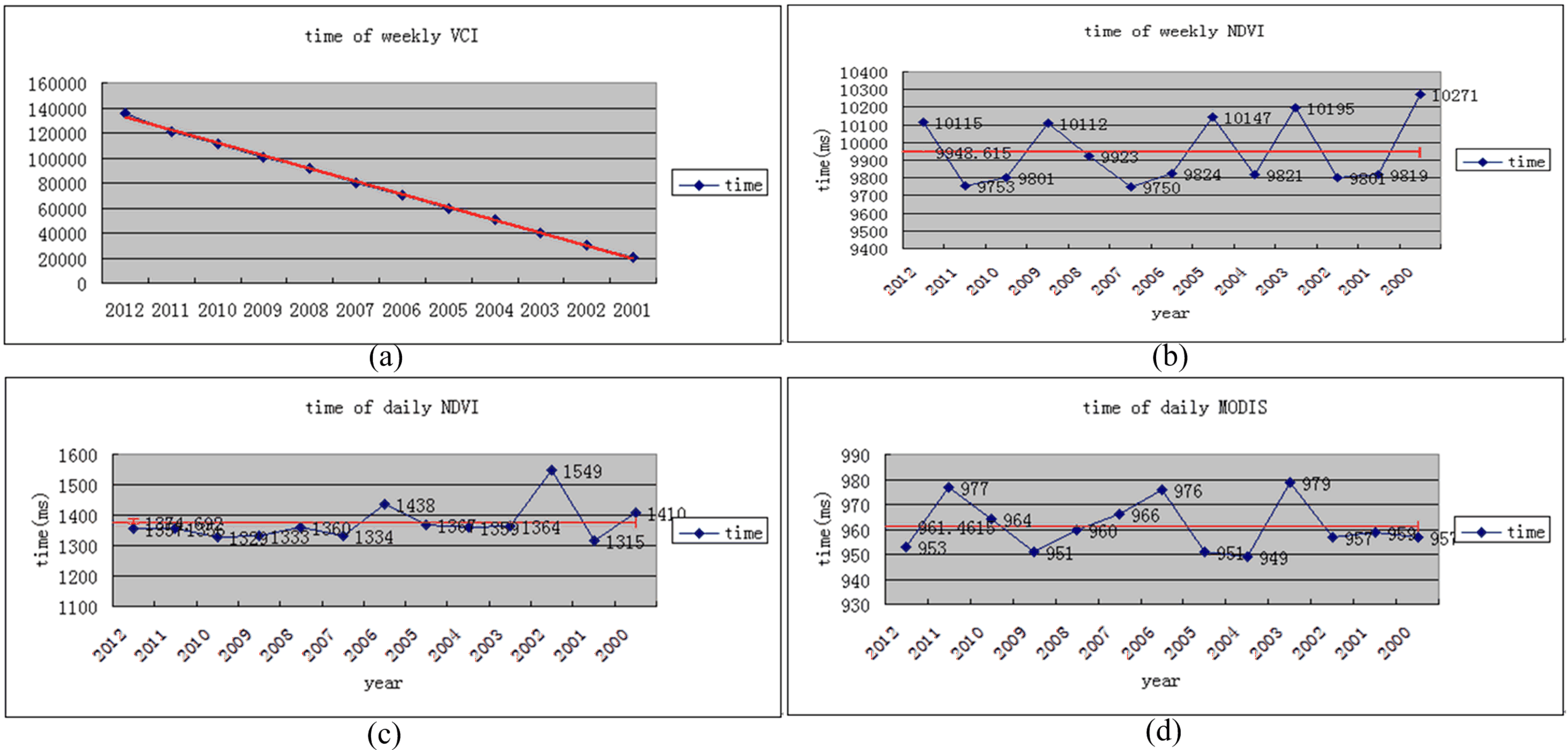
- Although the performance of the provenance method is associated with its implementation, we can consider the time and space complexities in this experiment. The time cost of tracking several depths and hundreds or thousands of documents was in the order of tens to hundreds of seconds. We analyzed the performance for our experiment based on six provenance depths. The average tracking time per document ranged from 50 to 60 ms. The size of the O&M documents was in the order of 10 KBs. Numerous remotely sensed observations may be processed up to a dozen times in this application. The execution time grew linearly with the tracked documents Figure 13a. The average time cost per tracking document was not significantly affected, as shown in Figure 13a–d. Therefore, we can deduce that as the execution time and required storage increased, the cost increased linearly.
- The proposed framework can be applied in other environments. Although the provenance model is based on the Sensor Web framework, it may be extended to record provenance information for Web services. If the processed observations are described with O&M, and the parent O&M is tracked with a xlink:href in omp:ParentOM without sending a GET/POST request, the provenance information can also be tracked. If an O&M document is used to describe the observation’s metadata, the provenance information can also be recorded. The service information should be set to null. However, the procedure information should be described in more detail to explain how the observations were handled, which may increase the scope of this model.
Acknowledgments
Author Contributions
Conflicts of Interest
References and Notes
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New generation sensor web enablement. Sensors 2011, 11, 2652–2699. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Chen, N.; Yang, C.; Di, L. Cloud computing enabled Web Processing Service for Earth Observation data processing. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2012, 5, 1637–1649. [Google Scholar] [CrossRef]
- Kridskron, A.; Chen, N.; Peng, C.; Yang, C.; Gong, J. Flood detection and mapping of the Thailand Central plain using RADARSAT and MODIS under a Sensor Web enabled environment. Int. J. Appl. Earth Obs. GeoInform. 2012, 13, 245–255. [Google Scholar]
- Chen, N.; Di, L.; Chen, Z.; Gong, J. An efficient method for near-real-time on-demand retrieval of remote sensing observations. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2011, 4, 615–625. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, N.; Di, L.; Gong, J. A flexible Data and Sensor Planning Service for virtual sensors based on Web Service. IEEE Sens. J. 2011, 11, 1429–1439. [Google Scholar] [CrossRef]
- Chen, N.; Li, D.; Di, L.; Gong, J. An automatic SWILC classification and extraction for the AntSDI under a Sensor Web enabled environment. Can. J. Remote Sens. 2010, 36 (Supplement 1), 1–12. [Google Scholar] [CrossRef]
- Chen, N.; Di, L.; Yu, G.; Gong, J. Geo-processing workflow driven wildfire hot pixel detection under sensor web enabled environment. Comput. Geosci. 2010, 36, 362–372. [Google Scholar] [CrossRef]
- W3C Workshop RDF Next Steps document, Provenance requirements for the next version of rdf. 2010, p. 5. Available online: http://www.w3.org/2005/Incubator/prov/wiki/images/3/3f/RDFNextStep_ProvXG-submitted.pdf (accessed on 11 January 2014).
- A White Paper for NSF EarthCube, Provenance in earth science cyberinfrastructure. 2011, p. 7. Available online: http://semanticommunity.info/@api/deki/files/13808/020_Di.pdf (accessed on 11 January 2014).
- Groth, P.; Miles, S.; Moreau, L. PReServ: Provenance Recording for Services. In Proceedings of the UK OST e-Science second All Hands Meeting 2005, Nottingham, UK, 19–22 September 2005.
- Michlmayr, A.; Rosenberg, F.; Leitner, P.; Dustdar, S. Service provenance in qos-aware web service runtimes. In Proceedings of the IEEE International Conference on Web Services 2009, Los Angeles, CA, USA, 6–10 July 2009; pp. 115–122.
- Buneman, P.; Khanna, S.; Tan, W. Why and where: A characterization of data provenance. In Proceedings of the 8th International Conference on Database Theory, London, UK, 4–6 January 2001.
- Cheney, J.; Chiticariu, L.; Tan, W. Provenance in databases: Why, how, and where. Found. Trends Databases. 2009, 1, 379–474. [Google Scholar] [CrossRef]
- Ram, S.; Liu, J. A new perspective on semantics of data provenance. In Proceedings of the First International Workshop on the role of Semantic Web in Provenance Management (SWPM 2009), Washington, DC, USA, 25–26 October 2009.
- Simmhan, Y.; Plale, B.; Gannon, D. A framework for collecting provenance in data-centric scientific workflows. In Proceedings of the International Conference on Web Services, Chicago, IL, USA, 18–22 September 2006; pp. 427–436.
- Zhao, Y.; Wilde, M.; Foster, I. Applying the virtual data provenance model. In Proceedings of the International Provenance and Annotation Workshop 2006 (IPAW2006), Chicago, IL, USA, 3–5 May 2006.
- Technical Report, Tracking RDF Graph Provenance Using RDF Molecules. 2005, p. 13. Available online: http://ebiquity.umbc.edu/get/a/publication/178.pdf (accessed on 11 January 2014).
- Hausenblas, M.; Slany, W.; Ayers, D. A performance and scalability metric for virtual RDF graphs. In Proceedings of the 3rd Workshop on Scripting for the Semantic Web (SFSW) at ESWC, Innsbruck, Austria, 30 May 2007.
- Hartig, O. Provenance information in the web of data. In Proceedings of the Linked Data on the Web Workshop 2009, Madrid, Spain, 20 April 2009.
- Moreaua, L.; Clifford, B.; Freireb, J.; Futrellec, J.; Gild, Y.; Grothe, P.; Kwasnikowskaf, N.; Milesg, S.; Missierh, P.; Myersc, J.; et al. The open provenance model core specication (v1.1). Future Gener. Comput. Syst. 2011, 27, 743–756. [Google Scholar] [CrossRef]
- Missier, P.; Belhajjame, K.; Cheney, J. The W3C PROV family of specifications for modelling provenance metadata. In Proceedings of the 16th International Conference on Extending Database Technology, Genoa, Italy, 18–22 March 2013.
- Di, L.; Shao, Y.; Kang, L. Implementation of geospatial data provenance in a web service workflow environment with ISO 19115 and ISO 19115-2 lineage model. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5082–5089. [Google Scholar]
- Baumann, P. OGC Implementation Standard 09-110r4: OGC® WCS 2.0 Interface Standard—Core: Corrigendum, Version 2.0.1; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Ledlie, J.; NG, C.; Holland, D.; Muniswamy-Reddy, K.; Braun, U.; Seltzer, M. Provenance-aware sensor data storage. In Proceedings of the 21st International Conference on Data Engineering Workshops 2005, Tokyo, Japan, 5 April 2005.
- Botts, M.; Robin, A. OGC Implementation Standard 12-000: OpenGIS SensorML: Model and XML Encoding Standard, Version 2.0.0; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Cox, S. OGC Abstract Specification 10-004r3: Geographic Information: Observations and Measurements OGC Abstract Specification Topic 20; Open Geospatial Consortium: Wayland, MA, USA, 2010. [Google Scholar]
- Cox, S. OGC Implementation Standard 10-025r1: Observations and Measurements—XML Implementation, Version 2.0; Open Geospatial Consortium: Wayland, MA, USA, 2011. [Google Scholar]
- Bröring, A.; Stasch, C.; Echterhoff, J. OGC Implementation Specification 12-006: OGC® Sensor Observation Service Interface Standard, Version 2.0; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Schut, P. OGC Implementation Specification 05-007r7: OGC® Web Processing Service, Version 1.0.0; Open Geospatial Consortium: Wayland, MA, USA, 2007. [Google Scholar]
- Simonis, I.; Echterhoff, J. OGC Implementation Standard 09-000: OGC® Sensor Planning Service Implementation Standard; Open Geospatial Consortium: Wayland, MA, USA, 2011. [Google Scholar]
- Singh, R.; Roy, S.; Kogan, F. Vegetation and temperature condition indices from NOAA AVHRR data for drought monitoring over India. Int. J. Remote Sens. 2003, 24, 4393–4402. [Google Scholar] [CrossRef]
- Yang, Z.; Di, L.; Yu, G.; Chen, Z. Vegetation condition indices for crop vegetation condition monitoring. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, Canada, 24–29 July 2011; pp. 3534–3537.
- MODIS Surface Reflectance User’s Guide. 2011, p. 40. Available online: http://www.modis-sr.ltdri.org/products/MOD09_UserGuide_v1_3.pdf (accessed on 11 January 2014).
- Kurita, H.; Hatano, K.; Miyazaki, J.; Uemura, S. Efficient query processing for large XML data in distributed environments. In Proceeding of the 21st International Conference on Advanced Information Networking and Applications 2007, Niagara Falls, Canada, 21–23 May 2007; pp. 317–322.
- Ng, W.; Lam, W.Y.; Cheng, J. Comparative analysis of XML compression technologies. World Wide Web. 2006, 9, 5–33. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Chen, N. Provenance Information Representation and Tracking for Remote Sensing Observations in a Sensor Web Enabled Environment. Remote Sens. 2015, 7, 7646-7670. https://doi.org/10.3390/rs70607646
Chen Z, Chen N. Provenance Information Representation and Tracking for Remote Sensing Observations in a Sensor Web Enabled Environment. Remote Sensing. 2015; 7(6):7646-7670. https://doi.org/10.3390/rs70607646
Chicago/Turabian StyleChen, Zeqiang, and Nengcheng Chen. 2015. "Provenance Information Representation and Tracking for Remote Sensing Observations in a Sensor Web Enabled Environment" Remote Sensing 7, no. 6: 7646-7670. https://doi.org/10.3390/rs70607646
APA StyleChen, Z., & Chen, N. (2015). Provenance Information Representation and Tracking for Remote Sensing Observations in a Sensor Web Enabled Environment. Remote Sensing, 7(6), 7646-7670. https://doi.org/10.3390/rs70607646