1. Introduction
“Random Forest” (RF) is now a widely used algorithm for remote sensing image classification [
1]. Its ability to handle high dimensional and non-normally distributed data has made it an attractive and powerful option for integrating different imagery sources and ancillary data sources into image classification workflows [
2]. RF is an ensemble classifier that produces many Classification and Regression (CART)-like trees, where each tree is grown with a different bootstrapped sample of the training data, and approximately one third of the training data are left out in the construction of each tree [
3]. The input variables (
i.e., image channels) are also randomly selected for building trees. These characteristics of the algorithm allow RF to produce an accuracy assessment called “out-of-bag” error (rfOOB error) using the withheld training data as well as measures of variable importance based on the mean decrease in accuracy when a variable is not used in a building a tree. Breiman considers rfOOB error to be an independent assessment of accuracy, as the sample points used in error calculation are not used in building that tree of the “forest” for classification [
3].
A number of studies have compared the results of RF classification with other classifiers (e.g., [
4,
5,
6]) and the different model parameters within RF (e.g., [
7]). However, very little has been written about the sensitivity of RF to different strategies for selecting the training data used in classification (see [
8] for a recent example). RF classifications are generally thought to be more stable than CART and commonly used parametric techniques, such as Maximum Likelihood, due to the use of bootstrapping and a random subset of data in building the RF model [
9]. However, like other classification techniques, several aspects of the sampling strategy used to collect training data play an important role in the resulting classification. In this study we assess three aspects of the sampling strategy and resulting training data: sample size, spatial autocorrelation and proportions of classes within the training sample.
Supervised image classification requires the collection of both training and validation data to produce thematic maps of features of interest (e.g., general land cover, agricultural crops, wetland classes,
etc.) [
10]. Regardless of the choice of classifier, accuracy assessments are used to determine the quality of the classification, and several factors can affect the results of an accuracy assessment, including training sample size [
11,
12], the number of classes in the classification [
13], the ability of the training data to adequately characterize the classes being mapped [
10], and dimensionality of the data [
13]. Generally, when performing image classification and accuracy assessments, training and validation data should be statistically independent (e.g., not clustered) [
14] and representative of the entire landscape [
10,
12], and there should be abundant training data in all classes [
15]. Many different training and validation sampling schemes are used throughout the literature, but without careful scrutiny of each dataset used and the specific assessment method, it may be difficult to compare results of classifications [
11,
16]. Ideally, a randomly distributed sampling strategy should be used for obtaining training and validation data, but this method can be time consuming and difficult to implement if ground validation is required for each point [
11,
16]. However, when training and validation data are not randomly distributed (as in the use of polygon data or homogenous areas of training data), these data violate the assumption of independence, which has been shown to lead to optimistic bias in classification [
14,
17,
18], where reported accuracy of the classification is inflated [
14]. Care must be taken to ensure validation points are drawn from a sample independent of training data to avoid optimistic bias [
14].
It has also been noted that statistical classifiers and machine learning algorithms may be biased where the proportions of training or validation data classes are distributed unequally or are imbalanced relative to the actual land cover proportions. In these cases, the classification may favour the ‘majority’ classes within the training data [
12,
19,
20] (
i.e., the class that represents the largest proportion in the training sample). Classes that are over-represented in the training data may dominate the resulting classification, whereas classes that are under-represented in the training data may also be under-represented in the classification. In such cases, the magnitude of the bias is a function of the training data class imbalance [
21]. To work with imbalanced datasets or instances where a class represents a small portion of the training data (
i.e., rare classes), over-sampling and under-sampling are sometimes used to produce more balanced datasets [
20]. For example, Puissant
et al. [
22] noted classes that were rare in the landscape were also often under-represented or not present in resulting classifications. To increase the presence of rare classes of interest, they devised a targeted sampling strategy in which training data were selected only in areas where the rare classes were known to be found. This targeting of the rare class resulted in a higher proportion of the class in the training data and better representation in the resulting classification. On the other hand, such targeted sampling could lead to overestimation of actual class proportions if not implemented judiciously. Cases of imbalanced data are likely common in remote sensing classification, but the sensitivity of machine learning classifiers such as RF to class proportions has not yet been thoroughly investigated.
The problems associated with imbalanced training data may be exacerbated when high dimensional datasets are combined with small sample sizes in training datasets [
20]. In such scenarios, the ability of machine learning algorithms to learn is compromised due to the complexity involved in making decisions to address a large number of features with limited sample points. Due to increased complexity in high dimensional datasets, classifiers generally require a larger training sample to achieve an acceptable level of accuracy [
13]. It is common practice to reduce dimensionality of remote sensing datasets before classification (e.g., through Principal Components Analysis) [
25]. Although RF is able to deal with high dimensional data [
23,
24], the results of image classification can be significantly improved if only the most important variables are used [
25]. RF produces measures of variable importance that indicate the influence of each variable on the classification. Several authors have noted that RF “importance” metrics are useful in determining the variables that provide the most valuable information to the classification (e.g., [
5,
6,
7,
25]). To produce the accurate RF classifications, only the most important input data should be used (
i.e., only the derivatives that are most important to the classification) [
9,
25], and correlated variables must first be removed from the classification.
The goal of this paper is to demonstrate the sensitivity of RF classification to different strategies for selecting training sample points. Our case study focused on land cover mapping with LiDAR terrain and point cloud derivatives at Alfred Bog, a large peatland complex in southeastern Ontario, Canada. This work builds on previous research in which RF was applied to map ecosystem types in another nearby peatland complex using a combination of LiDAR and Synthetic Aperture Radar (SAR) derivatives [
25]. The specific objectives of the current study are to: (1) determine the uncorrelated important variables in our classification and use these data in producing classifications for subsequent analysis; (2) quantify the variability in classification results when bootstrapped classifications are run with RF; (3) quantify the effects of training data sample size on rfOOB error and independent accuracy assessments; (4) assess the effects of training class proportions on mapped class proportions; and (5) assess the effects of spatial autocorrelation in training data on classification accuracy. To our knowledge, there are currently no other systematic, quantitative assessments of how training sample size and sample selection methods impact RF image classification results.
Study Area and Data
Alfred Bog is a large northern peatland complex in southeastern Ontario, Canada (
Figure 1). In the past three hundred years it has been subject to intense peat extraction, and reports suggest that the current 10,000 acres of Alfred Bog is less than half its original size [
26].
Figure 1.
Study area map. Top left shows location within Canada (purple star). Top right shows Landsat-8 4-3-2 red/greed/blue image with training data points overlain. Bottom left shows LiDAR Digital Surface Model (DSM). Bottom right shows LiDAR Digital Elevation Model (DEM).
Figure 1.
Study area map. Top left shows location within Canada (purple star). Top right shows Landsat-8 4-3-2 red/greed/blue image with training data points overlain. Bottom left shows LiDAR Digital Surface Model (DSM). Bottom right shows LiDAR Digital Elevation Model (DEM).
Figure 2.
Peatland and upland classes at Alfred Bog. Top panel indicates dominant species found in each class with a corresponding photo. The middle panel shows boxplots of the standard deviation of Height Vegetation classified points in each class. Boxplots in the bottom panel indicate the Valley Depth DEM derivative in each class. Valley Depth is a LiDAR derivative that measures the vertical distance to an inverted channel network and indicates the local magnitude of relief. If notches in boxplots do not overlap there is strong evidence that their medians are statistically different [
34]. Photos by Marisa Ramey (2014).
Figure 2.
Peatland and upland classes at Alfred Bog. Top panel indicates dominant species found in each class with a corresponding photo. The middle panel shows boxplots of the standard deviation of Height Vegetation classified points in each class. Boxplots in the bottom panel indicate the Valley Depth DEM derivative in each class. Valley Depth is a LiDAR derivative that measures the vertical distance to an inverted channel network and indicates the local magnitude of relief. If notches in boxplots do not overlap there is strong evidence that their medians are statistically different [
34]. Photos by Marisa Ramey (2014).
Additionally, drainage ditches exist throughout the bog as a result of efforts to lower the water table in certain areas for subsequent mining of peat. Vegetation varies throughout the bog and appears to be affected by the presence of the drainage ditches and mined edges of the bog. The main peatland classes that exist at Alfred Bog are poor fen, open shrub bog and treed bog, but these classes can be quite similar in both vegetation and topography (
Figure 2). Surrounding the peatland there are mixed, coniferous and deciduous forests with moss and low shrub understory, as well as vast agricultural areas with various crops. In this study, we use the peatland and surrounding area as our test site for investigating the sensitivity of RF classification to various different characteristics of training data. A LiDAR dataset is available for the entire bog and surrounding area. A number of recent studies have demonstrated that LiDAR derivatives provide superior classification accuracies compared with use of optical and radar imagery (e.g., [
25,
26,
27,
28,
29]) for both general land cover mapping and specifically in peatland mapping. Optical imagery captures spectral reflectance from the different vegetation species visible from above. Whereas vegetation species can be useful for differentiating many land use classes, peatland species diversity can be very low, with a few of the same dominant species occurring in many of the classes (
Figure 2). LiDAR captures information about the form of both topography and vegetation which, in peatlands, allows distinction between classes (
Figure 2). Peatland classes often form along hydrologic gradients, and boundaries between classes may not be clear on the ground. Also, peatland classes often vary in vegetation structure (height, density,
etc.). The ability of LiDAR to capture both topographic and vegetation components of the landscape has been shown to improve classification accuracies in peatlands [
25,
30]. In this study, we used LiDAR data for Alfred Bog to investigate the effects of training data characteristics and selection on classification results, although our findings likely generalize to other types of imagery.
2. Methods
2.1. LiDAR Data and Derivative Processing
LiDAR data were acquired by Leading Edge Geomatics on 30 October 2011. Data were obtained from the vendor in Log ASCII Standard (LAS) format and were classified (ground, non-ground) using LAStools software [
31], and height above ground for each point was calculated using the LASheight command. A Digital Elevation Model (DEM) was created from the ground classified points and a Digital Surface Model (DSM; elevations of the top of reflective surfaces) was developed from the all-hits data using inverse distance weighted interpolation. Several derivatives were calculated from ground and non-ground points (using LAStools) and several were calculated based on DEM or DSM raster values (using SAGA GIS [
32]—see
Table 1). Point spacing of the raw LiDAR data was approximately one point per square meter. The calculation of derivatives requires several points per grid, therefore, these derivatives were created at 8 m spatial resolution, as in Millard and Richardson [
25]. These derivatives are hereafter referred to as “variables.”
2.2. Training Data Collection
Selecting a random sample of training data distributed across a landscape ensures a sample that has class proportions that are representative of the actual landscape class proportions. Training data were classified using both field validation and high resolution image interpretation. A set of 500 randomly located points (with a minimum point spacing of 8 m) were distributed throughout the study area. Due to the difficult nature of access to peatlands, not all of these sites could be visited. Instead, the classes at most locations were manually interpreted from imagery. Expert knowledge resulting from a number of on-site field activities between 2012 and 2014 in conjunction with several ancillary image datasets were used to determine the class at each point. The interpreter visited representative sites and recorded the location with a GPS unit, as well as the peatland class. High- and medium-resolution optical imagery from spring, summer and fall seasons was then used along with derived and textural parameters to interpret the class at each of the randomly located points. These ancillary image sources were not used in subsequent classification steps.
Table 1.
List of Digital Elevation Model (DEM), Digital Surface Model (DSM) and point cloud derivatives used in classification created in SAGA [
32]. Raster/point describes if the derivative was calculated from raw LiDAR points or a raster surface [
35]. Abbreviations: HAG = height above ground; veg = vegetation; hgt = height; avg= average; and std= standard deviation.
Table 1.
List of Digital Elevation Model (DEM), Digital Surface Model (DSM) and point cloud derivatives used in classification created in SAGA [32]. Raster/point describes if the derivative was calculated from raw LiDAR points or a raster surface [35]. Abbreviations: HAG = height above ground; veg = vegetation; hgt = height; avg= average; and std= standard deviation.
| Variable | Description | Raster/Point |
|---|
| Catchment Slope | Average gradient above the flow path | DEM |
| Channel Network Base Level | Elevation at the channel bottom at the point where all runoff from the watershed leaves the watershed | DEM |
| Diff. from Mean | Difference between DEM value and mean DEM value | DEM, DSM |
| LS Factor | Slope length gradient factor [36] | DEM |
| Max Value | Maximum value of DEM within 10 × 10 grid cell window | DEM, DSM |
| Mean Value | Mean value of DEM within 10 × 10 grid cell window | DEM, DSM |
| Min Value | Minimum value of DEM within 10 × 10 grid cell window | DEM, DSM |
| Relative Slope Pos. | Distance from base of slope to grid cell | DEM |
| Slope | Slope of DEM grid cell from neighbouring grid cells [37] | DEM |
| Standard Deviation | Standard deviation of DEM surface elevations in 10 pixel window | DEM, DSM |
| Topographic Wetness Index | DEM derivative that models topographic control of hydrologic processes; function of slope and upslope contributing area [38] | DEM |
| Valley Depth | Vertical distance to inverted channel network | DEM |
| Distance Ch. Net. | Distance from grid cell to Channel Network | DEM |
| Avg. Veg. Hgt. | Average HAG of LiDAR vegetation points | Point |
| Canopy Density | Num. of points above breast height (1.32 m) divided by num. of all returns | Point |
| Count of All-hits | Total number of LiDAR points in each grid cell | Point |
| Count Ground Points | Total number of ground-classified LiDAR points in each grid cell | Point |
| DEM Difference from Polynomial Surface | Difference between DEM and nth order polynomial trend surface where n = 1 to 4. | DEM |
| Deviation from Mean | Deviation of DEM grid cell values from mean DEM value | DEM, DSM |
| Maximum Veg. Hgt. | Maximum HAG of vegetation-classified LiDAR | Point |
| Minimum Veg. Hgt. | Min. HAG of LiDAR vegetation points above breast height (1.32 m) | Point |
| Modified Catchment Area | Catchment area (calculation does not treat the flow as a thin film as done in in conventional algorithms) | DEM |
| Ratio Gr. to All-hits | Ratio of ground-classified LiDAR points to all points per grid cell | Point |
| SAGA Topographic Wetness Index | Topographic wetness calculated using the Modified Catchment Area | DEM |
| Std. Veg. Hgt. | Standard deviation of HAG of vegetation-classified LiDAR | Point |
| Terrain Ruggedness | Sum of change in each grid cell based on neighboring grid cells | DEM |
| Trend Surface nth Order | 1st-order polynomial of DEM surface | DEM |
| Vegetation Cover | The number of first returns above the breast height (1.32 m) divided by the number of all first returns and output as a percentage | Point |
Five land cover classes were chosen based on descriptions of wetland types in the Canadian Wetland Inventory [
33] and using knowledge of the field site acquired through numerous field surveys. The map classes included open shrub bog, treed bog, and fen, as well as two upland classes (mixed forest and agricultural areas).
2.3. RF Classification
RF classification was run in R Statistics [
34] open-source statistical software. The
randomForest [
39] and
raster [
40] packages were used to produce all classifications. One thousand trees were grown for each classification. The number of trees required to maintain a certain level of accuracy has been assessed by several authors, and the minimum number of trees for optimal classification appears to be somewhat variable (fewer than 100 [
7] to 300 trees [
4]). Therefore, using 1000 may not be necessary, but does not harm the model [
3], and variable importance is said to stabilize with a larger number of trees [
39]. Other variables that can be set in the
randomForest package, including
mtry (the number of variables tried at each split in node), were left at their default values. The basic script used for RF classification is provided in Appendix A. RF classification produces measures of “out-of-bag error” (rfOOB error).
Independent validation was also conducted for comparison to rfOOB error. For each classification, 100 data points were withheld from the training data used for classification. Once the classification was completed, the manually interpreted class for each reserved point was compared with the RF predicted class. From this, the number of incorrectly classified points divided by the total number of points provided the percentage classification error.
2.4. Variable Reduction
Previous research has shown that although RF can handle high dimensional data, classification accuracy remains relatively unchanged when only the most important predictor variables are used [
25]. When running the classification several times with all variables (referred to as “
All Variables”) classification (number of variables = 28), we noted that the most important variables varied among classifications, even when the same training data were used. Therefore, we ran the RF classification 100 times and recorded importance rankings of the top five most important variables for each iteration (
Table 2). It was evident that among these important variables, several of the variables were highly correlated. Spearman’s rank-order correlation was used to determine pair-wise correlations. Starting with the most frequently classified important variable and moving to successively less important ones, highly correlated (r > 0.9) variables were systematically removed leaving a set of only the most important and uncorrelated training data variables (
Table 3). This allowed us to run two additional classifications, one with all of the variables that were found to be very important (referred to as “
Important Variables” classification (number of variables = 15)) and one with only the uncorrelated important variables (referred to as “
Uncorrelated Important” classification (number of variables = 9)). We note that if the training set size is reduced, the set of variables in these subsets may be different, as they are chosen based on the data available (e.g., n = 100). The set of variables used also affects the classification quality, and, thus, error may be higher when there is more uncertainty about the important variables. Therefore, the results obtained in this study when reducing the size of the training set are most likely optimistic. The alternative is to re-select the important variables for every different subset of sample points. This would not allow the classifications to be fairly compared, as they would be created using different variables. Therefore, we have chosen to use the same variables in all subsets.
The McNemar test [
10,
41] was used to determine whether statistically significant differences existed between pairs of classifications (e.g.,
All Variables vs.
Important Variables,
Important Variables vs.
Important Uncorrelated Variables). This test requires the number of grid cells classified correctly by both classifications, the number of grid cells classified incorrectly by both classifications, the number of grid cells classified correctly by the first classification but not the second and
vice versa [
41,
42], which are derived from the confusion matrices produced through both rfOOB error and independent error assessments.
Each classification was run 25 times and classification probability maps were created that indicate the number of times a grid cell was labeled as the most frequently classified class, showing the uncertainty of each cell in the classification. For example, in a two-class classification, if a cell is labeled as the most frequently occurring class in 51 of 100 classifications, then the classification is somewhat unstable for that cell. Conversely, a cell that is labelled as the winning class 99 of 100 times indicates a more stable classification and hence higher confidence.
Table 2.
The number of times each variable was determined to be among the top five most important variables for each of 100 classification runs.
Table 2.
The number of times each variable was determined to be among the top five most important variables for each of 100 classification runs.
| | Removed due to Correlation | Number of Times “Most Important” | Number of Times “2nd Most Important” | Number of Times “3rd Most Important” | Number of Times “4th Most Important” | Number of Times “5th Most Important” |
|---|
| Valley Depth | | 52 | 22 | 10 | 4 | 6 |
| Std. Veg Height | | 20 | 37 | 20 | 7 | 7 |
| Max. Veg Height | | 13 | 17 | 21 | 23 | 8 |
| Trend Surface 1 | | 10 | 0 | 0 | 1 | 0 |
| Veg Cover | ✓ | 4 | 10 | 18 | 16 | 17 |
| Veg Density | ✓ | 1 | 3 | 3 | 19 | 17 |
| Trend Surface 2 | | 0 | 10 | 20 | 16 | 18 |
| DEM Diff Trend 1 | | 0 | 1 | 1 | 0 | 1 |
| Avg. Veg Height | ✓ | 0 | 0 | 1 | 44 | 0 |
| Mean DEM | | 0 | 0 | 3 | 1 | 6 |
| Canopy Height Model | | 0 | 0 | 1 | 0 | 1 |
| Max Dem | ✓ | 0 | 0 | 1 | 2 | 3 |
| DEM | ✓ | 0 | 0 | 1 | 1 | 5 |
| Min DEM | ✓ | 0 | 0 | 0 | 8 | |
| DEM Diff Trend 3 | | 0 | 0 | 0 | 1 | 2 |
2.5. Effect of Training Data Sample Size on RF Image Classification
Classifications were run with varying sizes of the training dataset. For each iteration, 100 random points were set aside for validation from the original 500 points. From the remaining 400 points for training, we created different random sample subsets for training with 90%, 80%, 70%, 60%, 50%, 40%, and 30% of the data, and ran classifications based on these subsets 25 times each. For each classification, rfOOB error was calculated and an independent validation was performed using the withheld points.
Table 3.
Most important variables selected by randomForest, and pairwise correlation.
Table 3.
Most important variables selected by randomForest, and pairwise correlation.
| | Valley Depth | Std. Veg Height | Max. Veg Height | Trend Surface 1 | Veg Cover | Veg Density | Trend Surface 2 | DEM Diff Trend 1 | Avg. Veg Height | Mean DEM | Canopy Height Model | Max Dem | DEM | Min DEM | DEM Diff Trend 3 |
|---|
| Valley Depth | | −0.19 | −0.14 | 0.25 | −0.06 | −0.08 | 0.21 | −0.52 | −0.14 | −0.06 | −0.05 | −0.06 | −0.07 | −0.06 | −0.56 |
| Std. Veg Height | −0.19 | | 0.87 | 0.30 | 0.80 | 0.82 | 0.40 | 0.24 | 0.87 | 0.47 | 0.80 | 0.47 | 0.47 | 0.47 | 0.15 |
| Max. Veg Height | −0.14 | 0.87 | | 0.26 | 0.94 | 0.96 | 0.38 | 0.26 | 0.99 | 0.46 | 0.88 | 0.46 | 0.46 | 0.47 | 0.15 |
| Trend Surface 1 | 0.25 | 0.30 | 0.26 | | 0.25 | 0.25 | 0.90 | −0.41 | 0.26 | 0.69 | 0.25 | 0.70 | 0.69 | 0.69 | −0.37 |
| Veg Cover | −0.06 | 0.80 | 0.94 | 0.25 | | 0.99 | 0.37 | 0.19 | 0.93 | 0.42 | 0.90 | 0.42 | 0.42 | 0.43 | 0.09 |
| Veg Density | −0.08 | 0.82 | 0.96 | 0.25 | 0.99 | | 0.37 | 0.22 | 0.95 | 0.44 | 0.90 | 0.43 | 0.44 | 0.44 | 0.11 |
| Trend Surface 2 | 0.21 | 0.40 | 0.38 | 0.89 | 0.37 | 0.37 | | −0.14 | 0.38 | 0.83 | 0.37 | 0.84 | 0.83 | 0.83 | −0.32 |
| DEM Diff Trend 1 | −0.52 | 0.24 | 0.26 | -0.41 | 0.19 | 0.22 | −0.14 | | 0.26 | 0.30 | 0.18 | 0.30 | 0.30 | 0.31 | 0.79 |
| Avg. Veg Height | −0.14 | 0.87 | 0.99 | 0.26 | 0.93 | 0.95 | 0.38 | 0.26 | | 0.46 | 0.87 | 0.46 | 0.46 | 0.47 | 0.16 |
| Mean DEM | −0.06 | 0.47 | 0.46 | 0.69 | 0.42 | 0.44 | 0.83 | 0.30 | 0.46 | | 0.40 | 0.999 | 0.999 | 0.999 | 0.20 |
| Canopy Height Model | −0.05 | 0.80 | 0.88 | 0.25 | 0.90 | 0.90 | 0.37 | 0.18 | 0.87 | 0.40 | | 0.40 | 0.40 | 0.41 | 0.07 |
| Max Dem | −0.06 | 0.47 | 0.46 | 0.70 | 0.42 | 0.43 | 0.84 | 0.30 | 0.46 | 0.999 | 0.40 | | 0.998 | 0.996 | 0.20 |
| DEM | −0.07 | 0.47 | 0.46 | 0.69 | 0.42 | 0.44 | 0.83 | 0.30 | 0.46 | 0.999 | 0.40 | 0.998 | | 0.998 | 0.21 |
| Min DEM | −0.06 | 0.47 | 0.47 | 0.69 | 0.43 | 0.44 | 0.83 | 0.31 | 0.47 | 0.999 | 0.41 | 0.996 | 0.998 | | 0.21 |
| DEM Diff Trend 3 | −0.56 | 0.15 | 0.15 | −0.37 | 0.09 | 0.11 | -0.32 | 0.79 | 0.16 | 0.20 | 0.07 | 0.20 | 0.21 | 0.21 | |
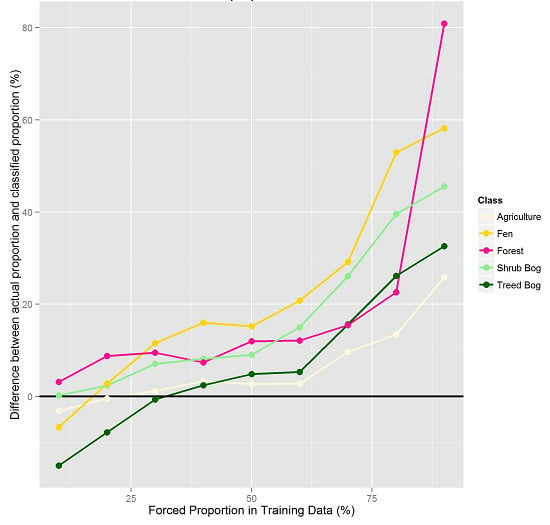
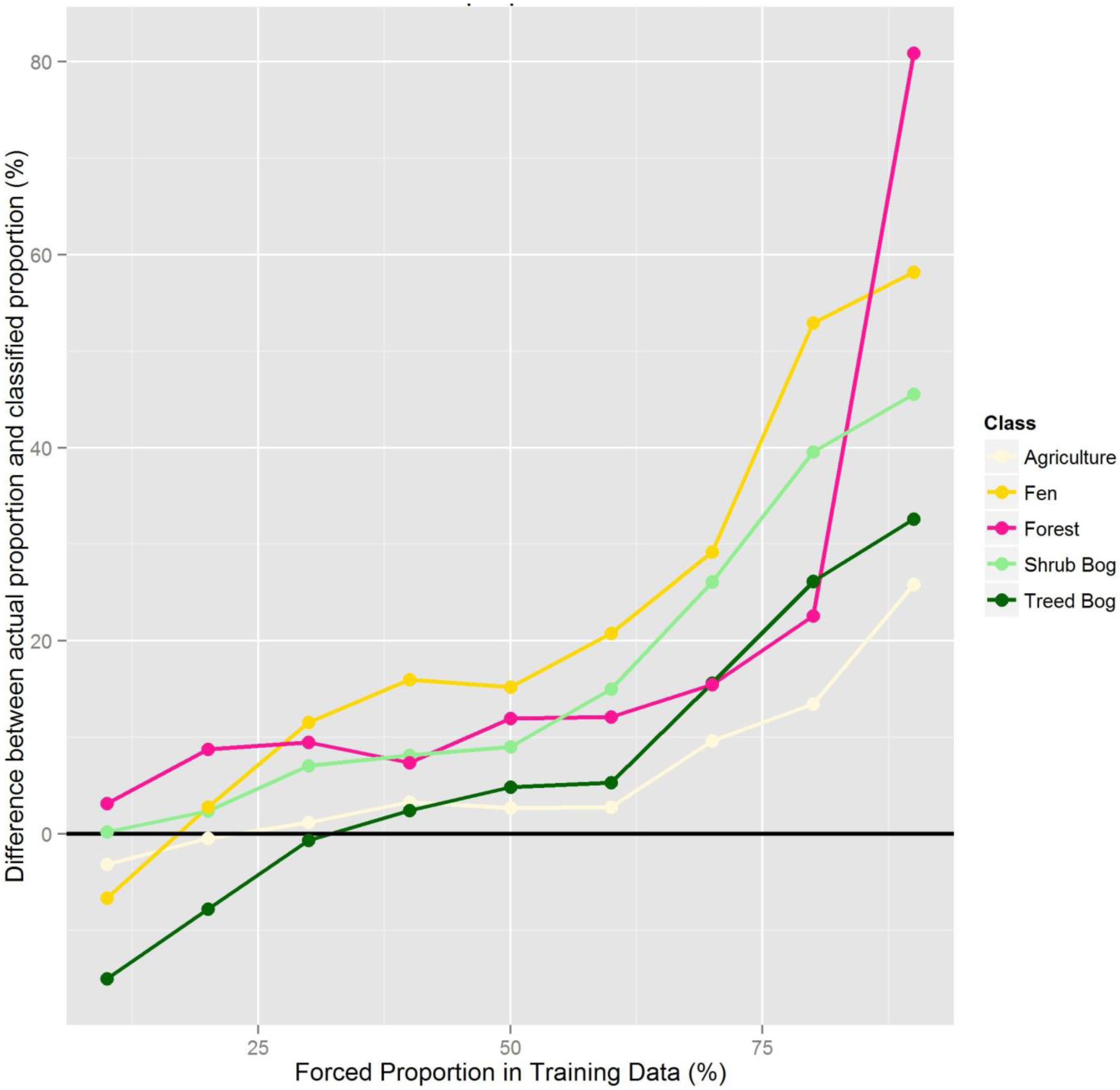
2.6. Effect of Training Data Class Proportions on RF Image Classification
From the full set of 500 points, the random validation set (n = 100) and the random training dataset (n = 400) were separated. Subsets of the training data were then created to examine the effect of the proportion of training data in different classes. We ensured that the same total number of training data were used in each set of data (
i.e., we varied the number of points within each class, keeping the total number of points the same). Different subsets of training data were created by forcing the proportion of the training data per class to range from 10% to 90%, with the remaining training data split evenly across the other classes (
Figure 3). For each class and forced proportion, we ran RF 25 times with a random sub-sample of the training data and reserved data for independent validation. The forced class proportions were maintained within the 25 random subsets of training data.
Figure 3.
Flow chart describing the methods used to create each sample of data with ‘forced proportions’ in each class.
Figure 3.
Flow chart describing the methods used to create each sample of data with ‘forced proportions’ in each class.
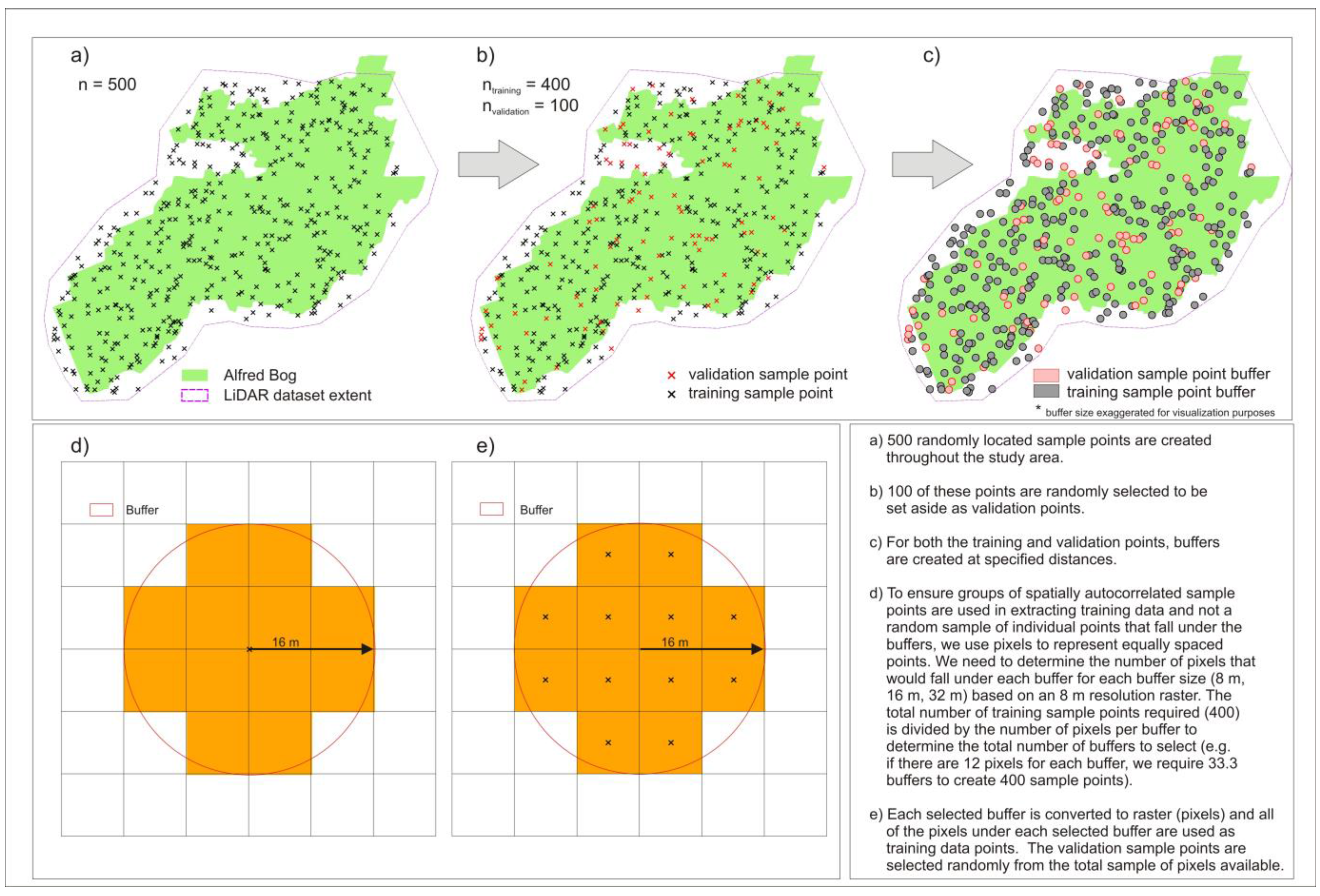
Figure 4.
Flow chart describing the methods used to create each sample of data with simulated spatial autocorrelation. (a) Five hundred randomly located sample points were created. (b) One hundred of these points were randomly set aside as validation points. (c) Buffers were created at specified distances around the training and validation points. (d) Grid cells were used to represent equally spaced points. To ensure groups of spatially autocorrelated sample points were used in extracting training data and not a random sample of individual points that fell within the buffers, the number of grid cells that would fall within each buffer for each buffer size (8 m, 16 m, and 32 m), based on an 8 m resolution raster, were determined. The total number of training sample points required (400) was divided by the number of grid cells per buffer to determine the total number of buffers to select, and the cells associated with those buffers were used in training. (e) Each selected buffer was converted to grid cells and all of the cells within each selected buffer were used as training data points. The validation sample points were selected randomly from the training data points in the original dataset that had not been used in the creation of the buffers.
Figure 4.
Flow chart describing the methods used to create each sample of data with simulated spatial autocorrelation. (a) Five hundred randomly located sample points were created. (b) One hundred of these points were randomly set aside as validation points. (c) Buffers were created at specified distances around the training and validation points. (d) Grid cells were used to represent equally spaced points. To ensure groups of spatially autocorrelated sample points were used in extracting training data and not a random sample of individual points that fell within the buffers, the number of grid cells that would fall within each buffer for each buffer size (8 m, 16 m, and 32 m), based on an 8 m resolution raster, were determined. The total number of training sample points required (400) was divided by the number of grid cells per buffer to determine the total number of buffers to select, and the cells associated with those buffers were used in training. (e) Each selected buffer was converted to grid cells and all of the cells within each selected buffer were used as training data points. The validation sample points were selected randomly from the training data points in the original dataset that had not been used in the creation of the buffers.
![Remotesensing 07 08489 g004]()
2.7. Effect of Spatial Autocorrelation of Training Data on RF Image Classification
To investigate the effect of spatial autocorrelation on the resulting classifications, the training data were subset to create different levels of spatial autocorrelation (
Figure 4). In creating these datasets, the same total number of points was maintained in each class. Buffers were created at three different sizes (8 m, 16 m, and 32 m) around training data sample points. Each buffer was converted to raster at 8 m resolution in order to create a set of equally spaced points throughout the defined zone. To ensure groups of spatially autocorrelated sample points were used in extracting training data and not a random sample of individual points that fell within the buffers, we first determined the number of grid cells that would fall within each buffer for each buffer size (8 m, 16 m, and 32 m) based on an 8 m resolution raster. The total number of training sample points required (400) was divided by the number of grid cells per buffer to determine the total number of buffers to select (e.g., if there were 12 grid cells for each buffer, we required 33 buffers to create 400 sample points) and the cells associated with those buffers were used in training. This resulted in three datasets with the same total number of grid cells but with varying degrees of spatial autocorrelation of the data varied (increased with buffer size). In cases where buffers overlapped (and classes in overlapping buffers were the same), the overlapping buffers did not result in duplicate points as the rasterization process would result in a single set of regularly spaced cells for these buffers. Only three cases occurred at the 32 m buffer level where overlapping buffers were of different classes (e.g., bog and fen). In these cases, the buffer with the larger area in an overlapping cell would be the resulting class. Since these instances were so few, the removal of a few points did not greatly affect the number of cells in these classes. In cases where the training data point did not fall on the intersection of grid cells depending on its exact location, the number of cells represented by each buffer may be slightly different than in the case where the point falls on the cell corner. Therefore, the sample sizes may vary slightly from expected (e.g., for a 16 m buffer, the actual number of cells beneath buffers ranged from 10 to 14, with the average being 12.2 and the expected number being 12).
To measure spatial autocorrelation, Moran’s I (local) [
43] was computed for each of the training datasets. Finally, a subset of the original training data points were selected that were not used to create the spatially-autocorrelated training data to use for independent validation. This ensured that the validation data were distributed throughout the entire image and not spatially autocorrelated with the training data. A Wilcoxon Rank Sum test [
44] was used to confirm that the mean values of each of the predictor variables in the training datasets were the same as the original dataset. The largest buffer size where the means were equal was 32 m. Beyond this buffer size (e.g., 64 m buffers) the means of the sample points were different than the original non-spatially autocorrelated sample.
4. Discussion
The process of training data creation for remote sensing image classification requires the analyst to make methodological choices that present tradeoffs in data quality (i.e., class representativeness) and quantity. For example, training data points where field validation has been completed result in high certainty in the training data set. However, these points are often difficult to obtain and therefore there may be a tendency for researchers to use fewer training data sample points. In peatlands and other remote environments, time and access constraints may require researchers to obtain training sample points from imagery without actually conducting field validation (i.e., through image interpretation, as has been done here). In some cases the certainty of the class of a training data sample point may be low but a greater number of training data sample points may be collected quickly and easily through this method, allowing for a larger training data sample size.
Overall, the results of this study demonstrate that RF image classification is highly sensitive to training data characteristics, including sample size, class proportions and spatial autocorrelation. Using a larger training sample size produced lower rfOOB and independent assessment error rates. As with other classifiers, larger training sample sizes are recommended to improve classification accuracy and stability with RF. Running iterative classifications using the same training and input data was found to produce different classification results, and the RF variable importance measures and rankings varied with iterative classifications. Therefore, the list of important variables from a single RF classification should not be considered stable. Although RF itself is an ensemble approach to classification and regression modelling, we recommend replication of RF classifications to improve classification diagnostics and performance.
Previous studies have demonstrated that RF performs well on high dimensional data, however, our results also show that variable reduction should be performed to obtain the optimum classification. When high dimensional datasets were used, classification results were noisy, despite creating an RF model with 1000 trees. Independent assessment error analysis also indicated that with high dimensional data RF may significantly underestimate error. Moreover, we demonstrated that removing highly correlated variables from the most important variables led to an increase in accuracy and, although slight, this difference was statistically significant (McNemar’s test, p < 0.1). Removing variables of lesser importance also improved the stability in classification, and the difference between rfOOB and independent assessment error was significantly reduced. Dimensionality can be considered relative to training sample size, and therefore if more training sample points had been available our classification results might have improved. Collection of training data sample points is time consuming and a limiting factor in the quality of resulting classifications.
One broad assumption when collecting training data and performing image classification is that classes are mutually exclusive and have hard, well-defined boundaries [
16], something that is rare in natural environments such as forests or wetlands. Peatlands, for example, are subject to local variation and gradients in ground water and hydrologic conditions that could greatly affect their plant species composition [
45]. Hydrologic gradients may result in gradients in nutrients and water chemistry, leading to gradients in plant species composition near the boundaries of classes. Even with detailed LiDAR-derived information about topography and vegetation, peatland classes are continuous in nature and this is problematic when classifiers result in hard boundaries. Areas of gradation and edges of classes are most likely to be misclassified, and mapping the probability of classification can identify areas that should be assessed more carefully or that represent unique ecotonal characteristics. In this case study, when training data are randomly sampled and classifications iteratively run, the agricultural class was stable through most of the iterations, but there was variability in the classifications near the edges of wetland classes. Although this is related to the continuous nature of peatland classes, mapping these boundaries accurately is often the main goal of a classification or mapping exercise, as the processes occurring in and external influences affecting these classes may be different.
A widely used method of collecting training data is for an image interpreter to visually assess an image and draw polygons around areas where a certain class is known to exist. This method produces highly clustered training sample points with inherently high spatial autocorrelation. Training data are produced when the grid cell value of each input derivative is extracted from the location of the training data point. The extracted grid cell values become the predictor data used in the classification and the interpreted class at that location becomes the training response. Since rfOOB error is calculated using a subset of the training data, the individual points in each validation subset will be highly similar to the training points when a training dataset with high spatial autocorrelation is provided to the classifier. Training data points are highly clustered, and therefore their predictor values are similar to the other points around them; when used in classification they will produce good results in areas where the training data predictors are similar to the predictor data used in classification. This means that areas near the spatially autocorrelated training data will result in high classification accuracy, and therefore drawing validation data points from a spatially autocorrelated sample will appear to be well classified while areas outside these locations are not being tested. When rfOOB error assessments are performed, RF draws its validation data from the training data sample provided. Therefore, if training data are spatially autocorrelated, rfOOB error will be overly optimistic. Three levels of spatial autocorrelation were simulated and we found the classification results to be very different and rfOOB-based accuracies to be very inflated when training data exhibited spatial autocorrelation. This has serious implications for the interpretation of the results from RF classification. If researchers do not report the level of spatial autocorrelation in their training data, it will be difficult to know if the classification has been subject to sample bias, as simulated in this study.
As the training data used here were randomly distributed, it is assumed that the proportions of training data within the sample are similar to the proportions of classes found throughout the landscape. However, when training data are selected using visually-interpreted homogenous areas, it is unlikely that the training data will reflect the true class proportions in the landscape. When interpreters are selecting training data through the traditional method they may be biased in their selection of training data to the classes that they are most certain in identifying or feel are most important. In the case of wetland mapping, interpreters may be biased towards selecting a larger proportion of training data sample points in wetland classes and, in this case, RF would over-predict the proportion of wetland cover in the final classification.
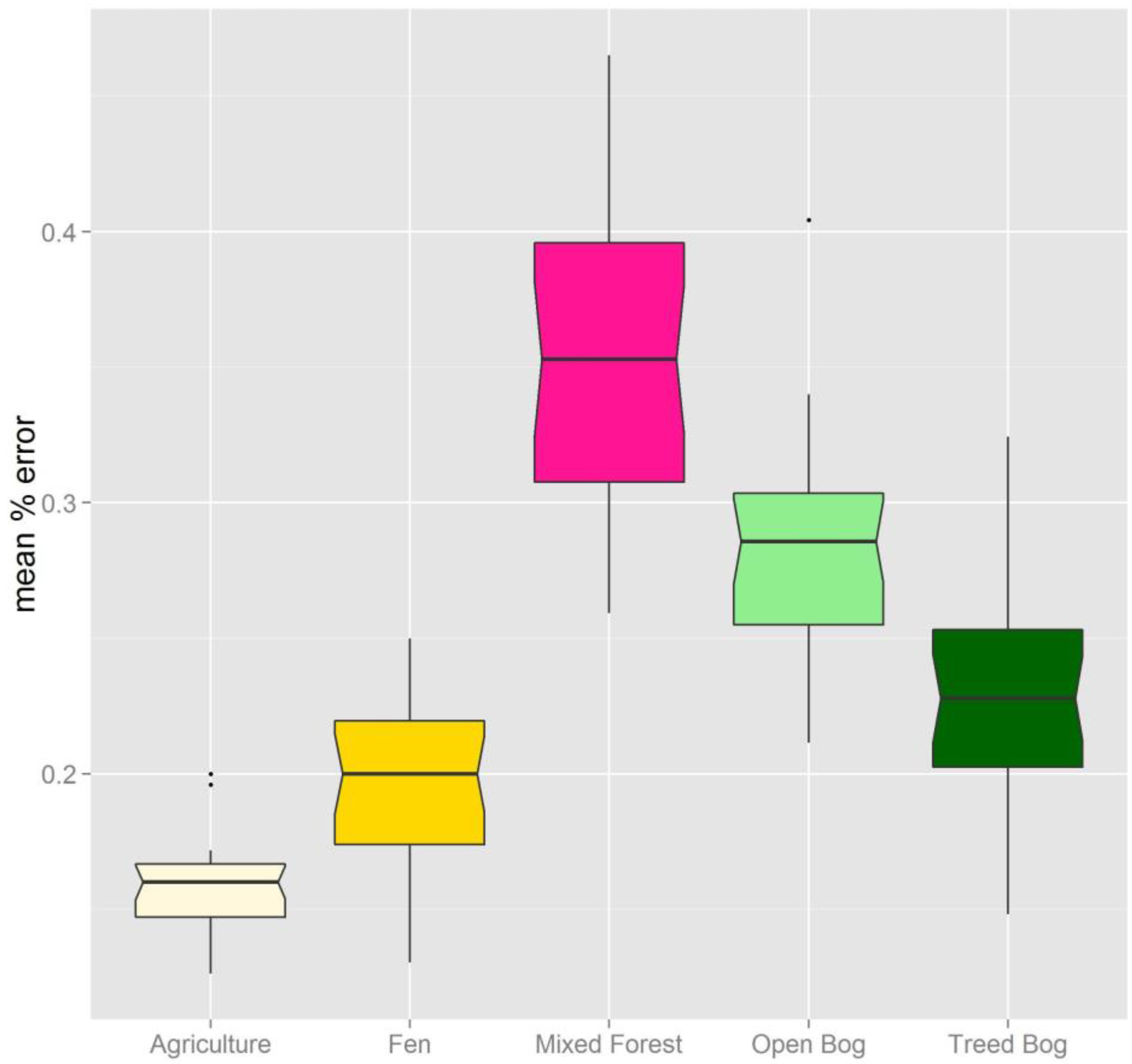
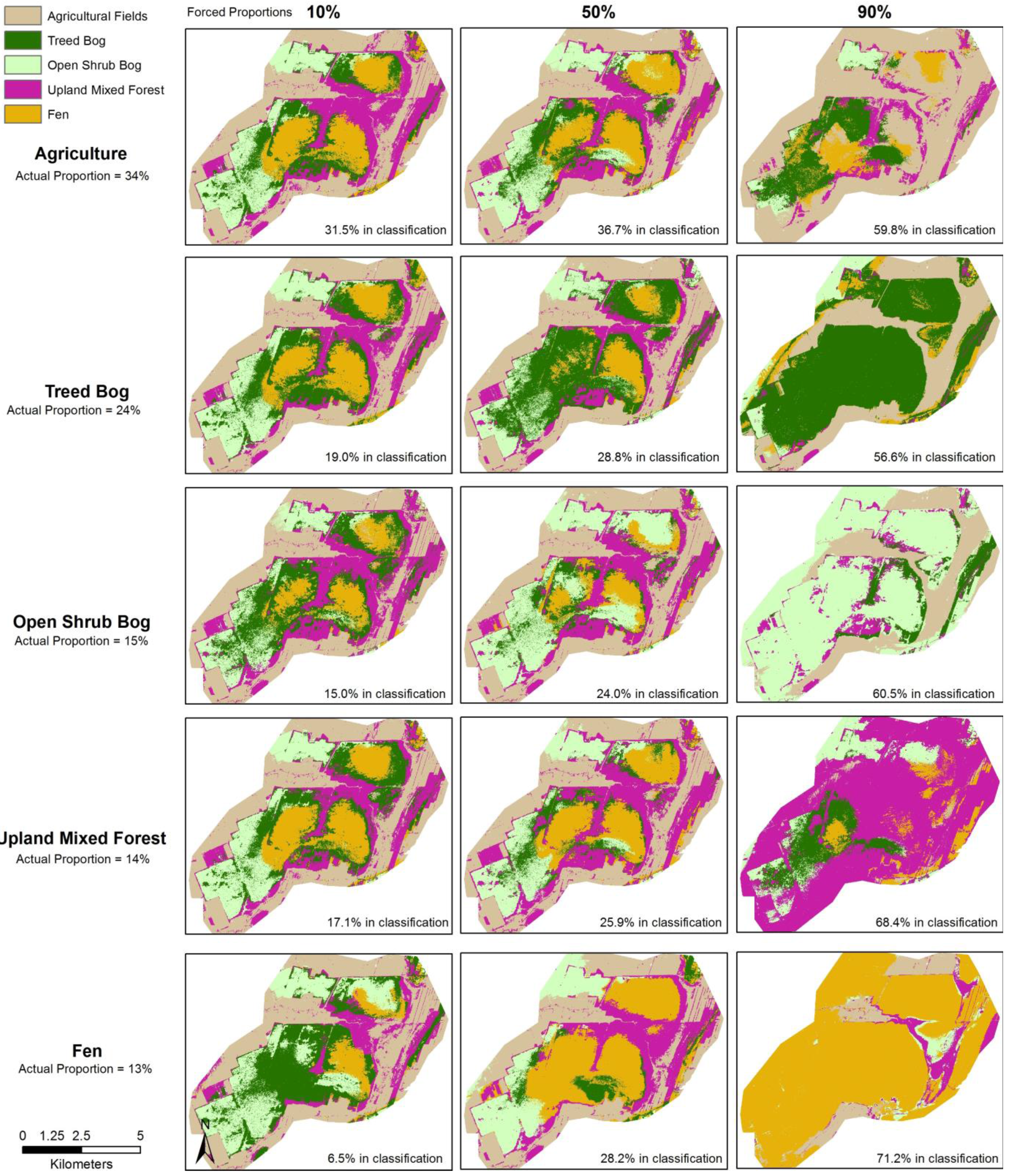
When training datasets were created where class proportions were forced to artificial levels, classification results reflected the forced proportions. When a class was under-represented in the training data, it was often under-represented in the output classification. There was one exception: Upland Mixed Forest was over-represented in the output classification when its proportions were simulated to be 10% of the training sample (actual proportion was estimated to be 14%), however this was a very small over-estimation (e.g. less than 5%) and this is likely due to the random selection process of RF, although it should also be noted that this class had the highest classification error in general. Once a class was represented by more than its actual proportion, RF predicted a greater proportion of that class in the classification results. These results indicate the importance of carefully selecting training data sample points without bias and so that landscape proportions are maintained. Often sampling strategies are designed so that an equal number of training data sample points are located within each class. However, when classes were simulated here with an equal number of training data in each class (20% of sample points in each of the five classes) those classes that were over-represented in the training sample were also over-represented in the predicted classification. Those that were under-represented in the training data were under-represented in the predicted classification. This again demonstrates the importance of using a randomly distributed or proportionally-representative sampling strategy. If under-sampling occurs within a class, the full statistical characteristics of that class may not be provided as data to the classifier, and therefore pixels of that class may be misclassified and their extent may be under-estimated. This implies that for rare classes, if over-sampling is undertaken to obtain a prediction for that class in the resulting classification, it may actually be falsely over-estimated. It is likely that collecting more training data samples would provide more training data to the classifier enabling a better representation of the statistical characteristics and variability of these proportionately-smaller classes.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







