
Stage Monitoring in Turbid Reservoirs with an Inclined Terrestrial Near-Infrared Lidar

 ,
,
Abstract
:
1. Introduction
2. Background
2.1. Conventional Use of Lidar
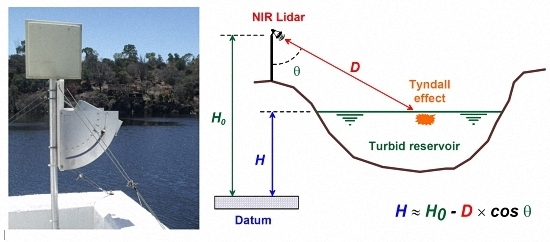
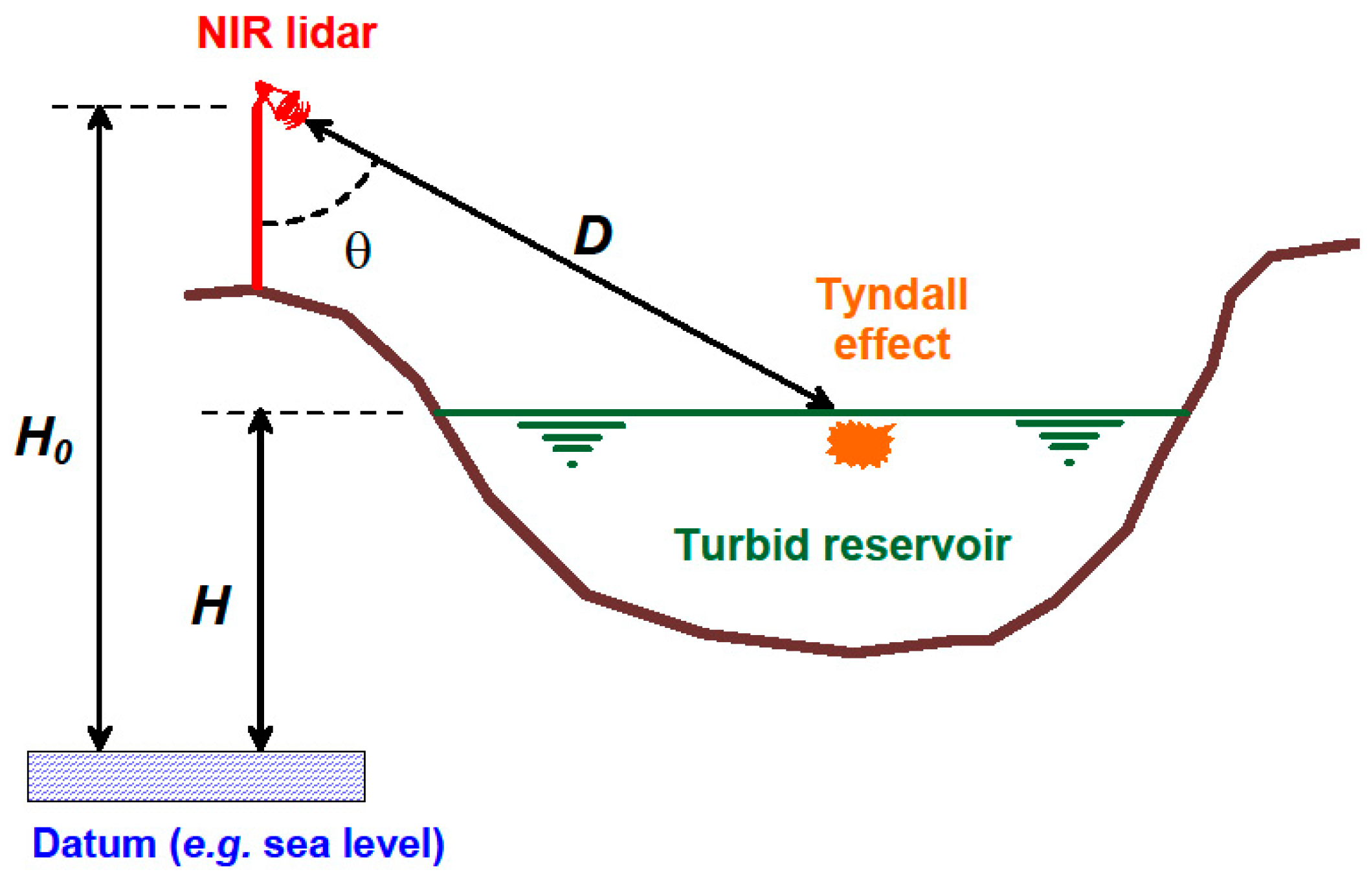
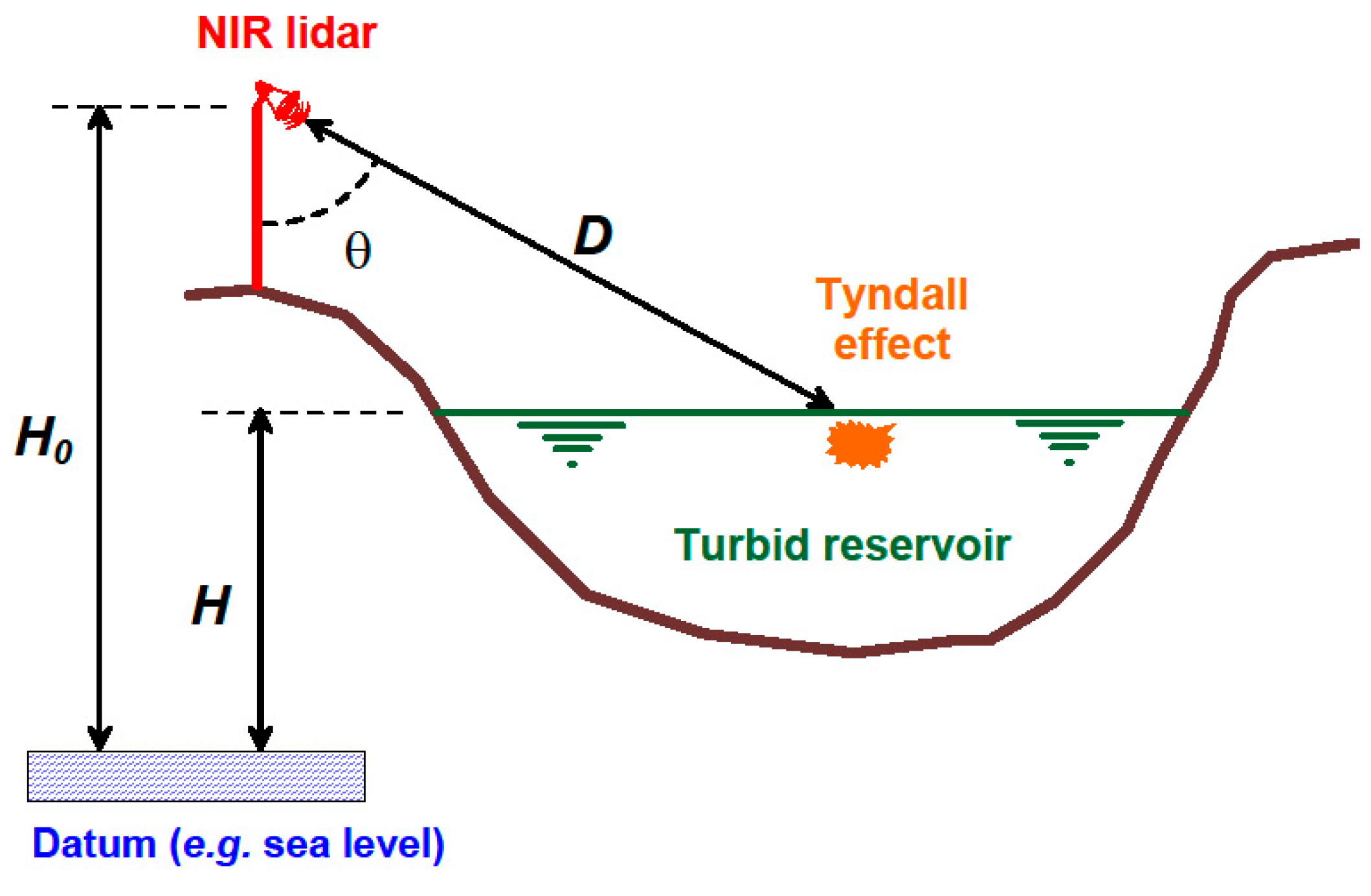
2.2. Fundamentals of the Proposed Technique
2.3. Empiricism of the Proposed Technique
3. Materials and Methods
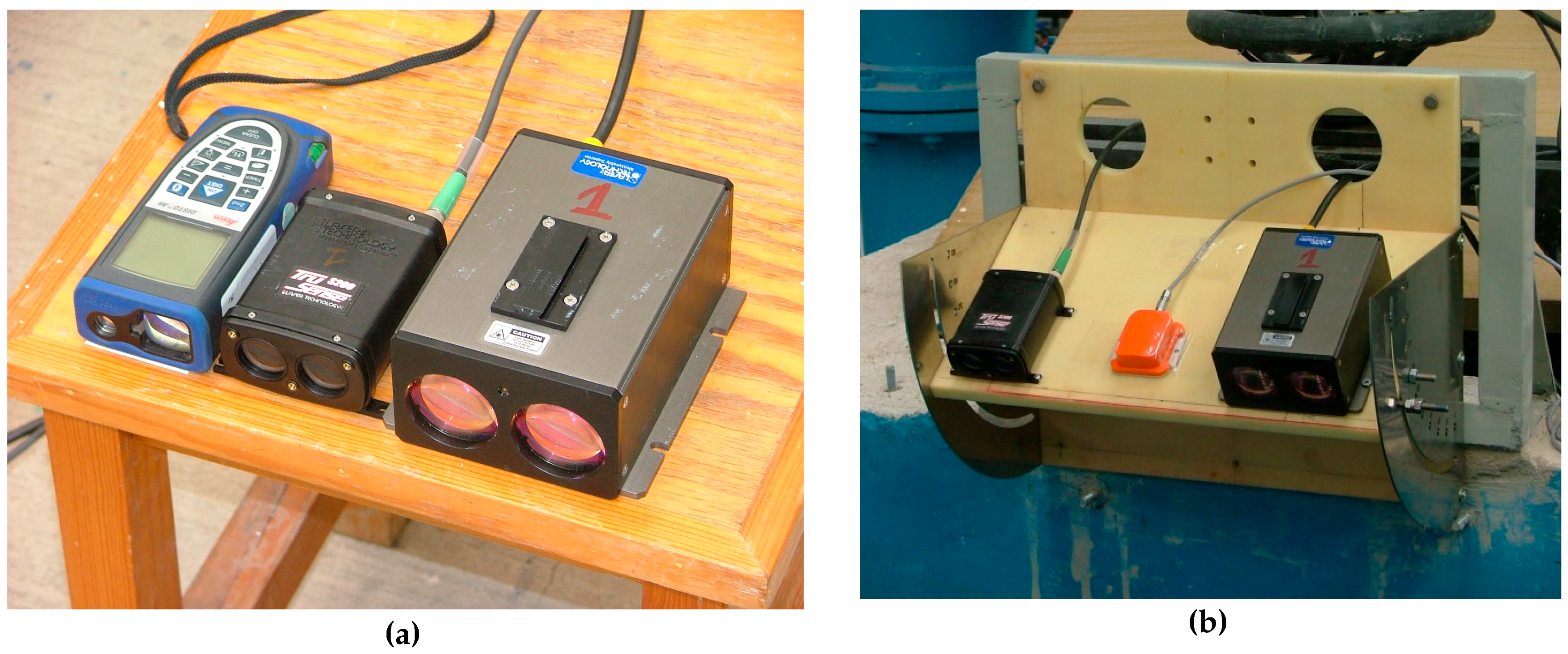
3.1. The Test Lidar
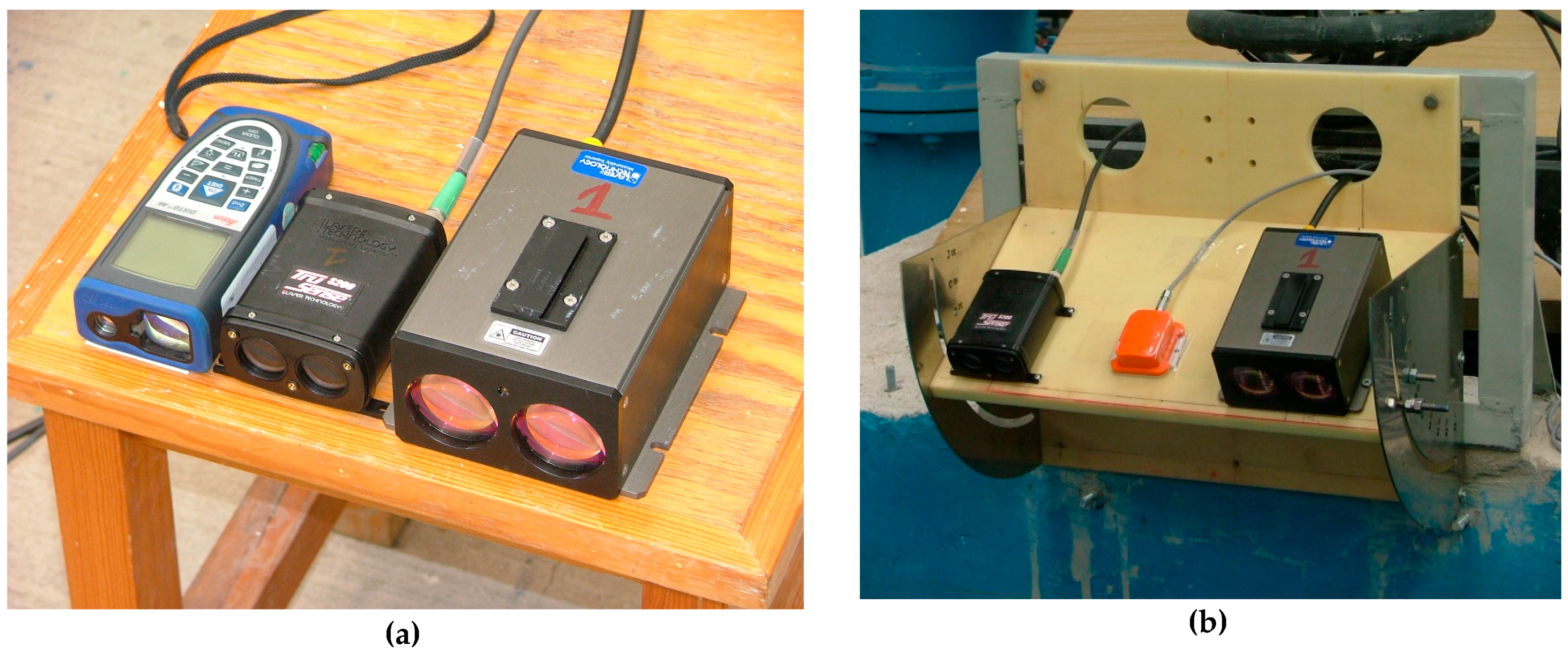
3.1.1. Lidar Selection
3.1.2. Lidar Configuration and Output
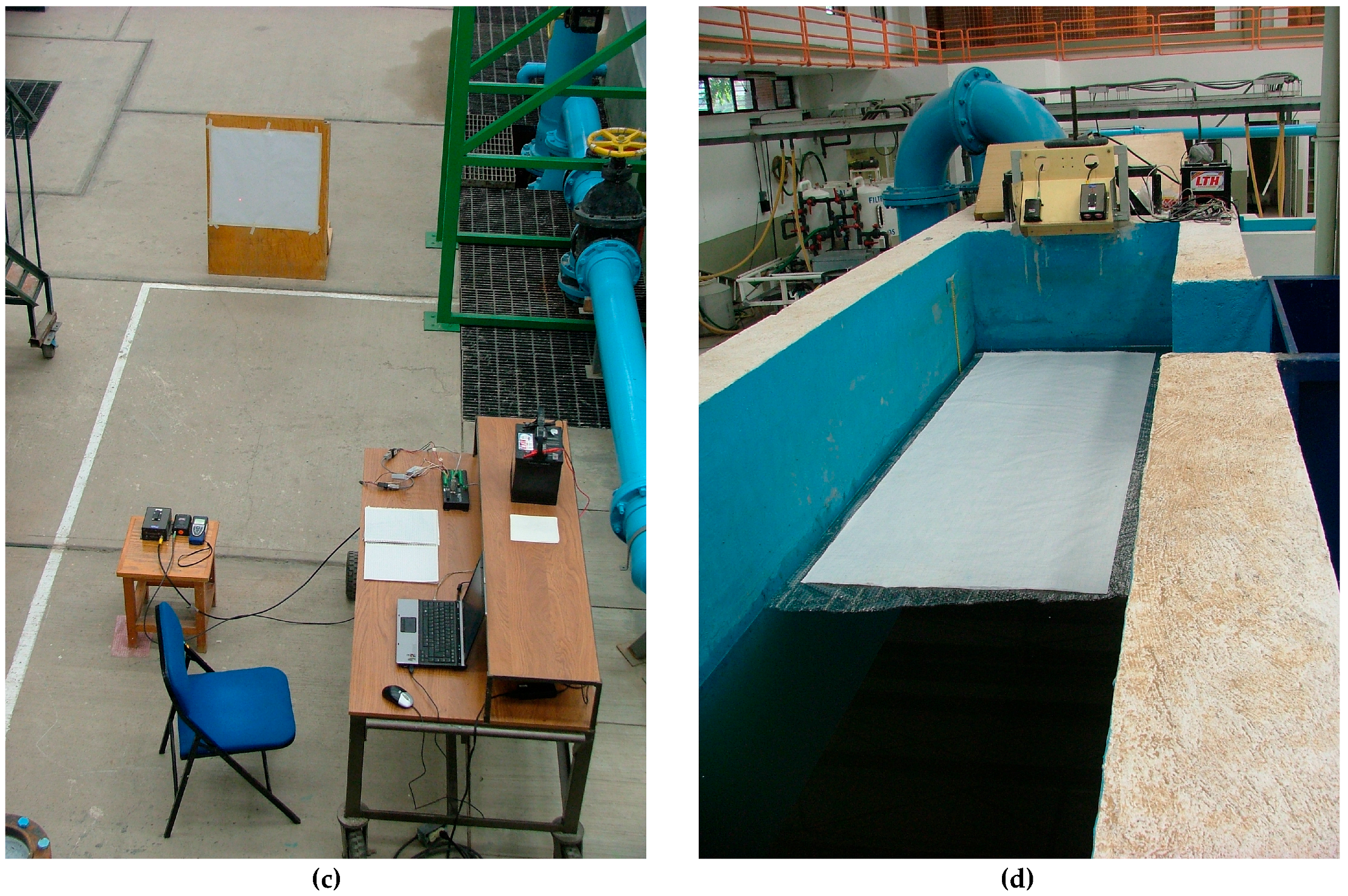
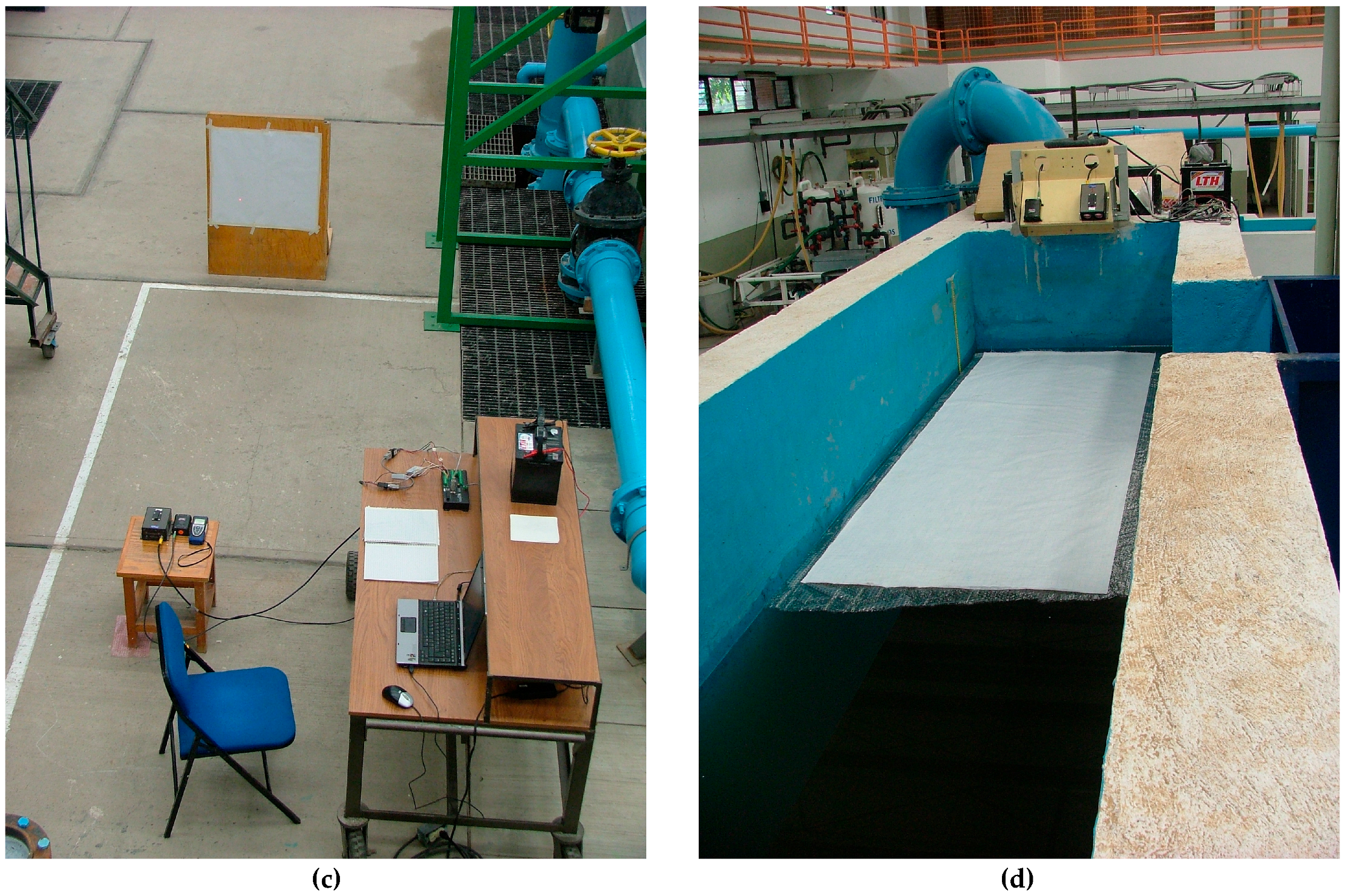
3.2. Laboratory Testing
3.2.1. Preliminary Check and Preparation of Turbid Water
3.2.2. Effects of the Lidar Incidence Angle and Water Transparency
3.3. Field Experiment
3.3.1. Site Selection
3.3.2. Instrumentation
4. Results and Discussion
4.1. Laboratory Results
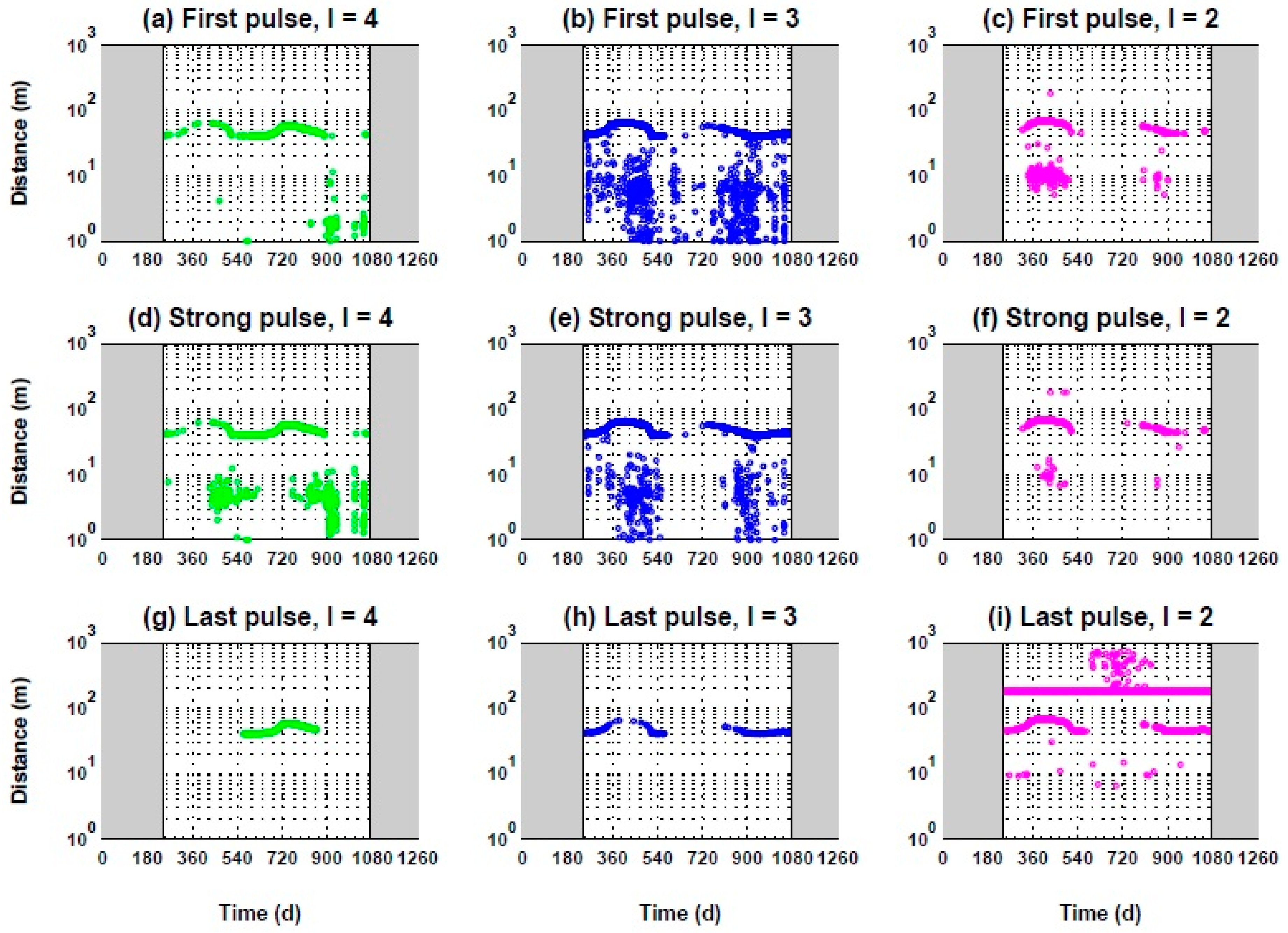
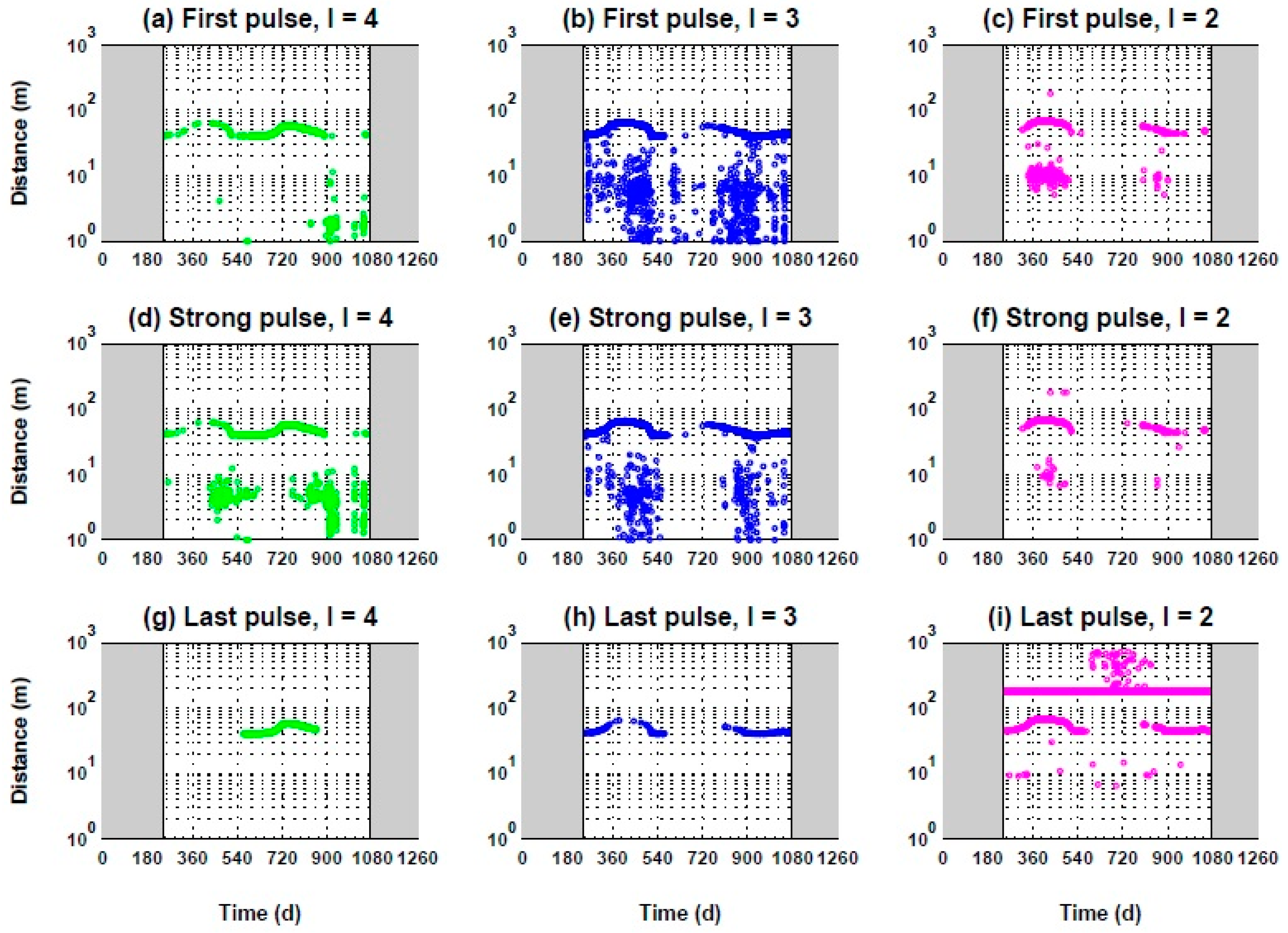
4.1.1. Raw-Data Filtering
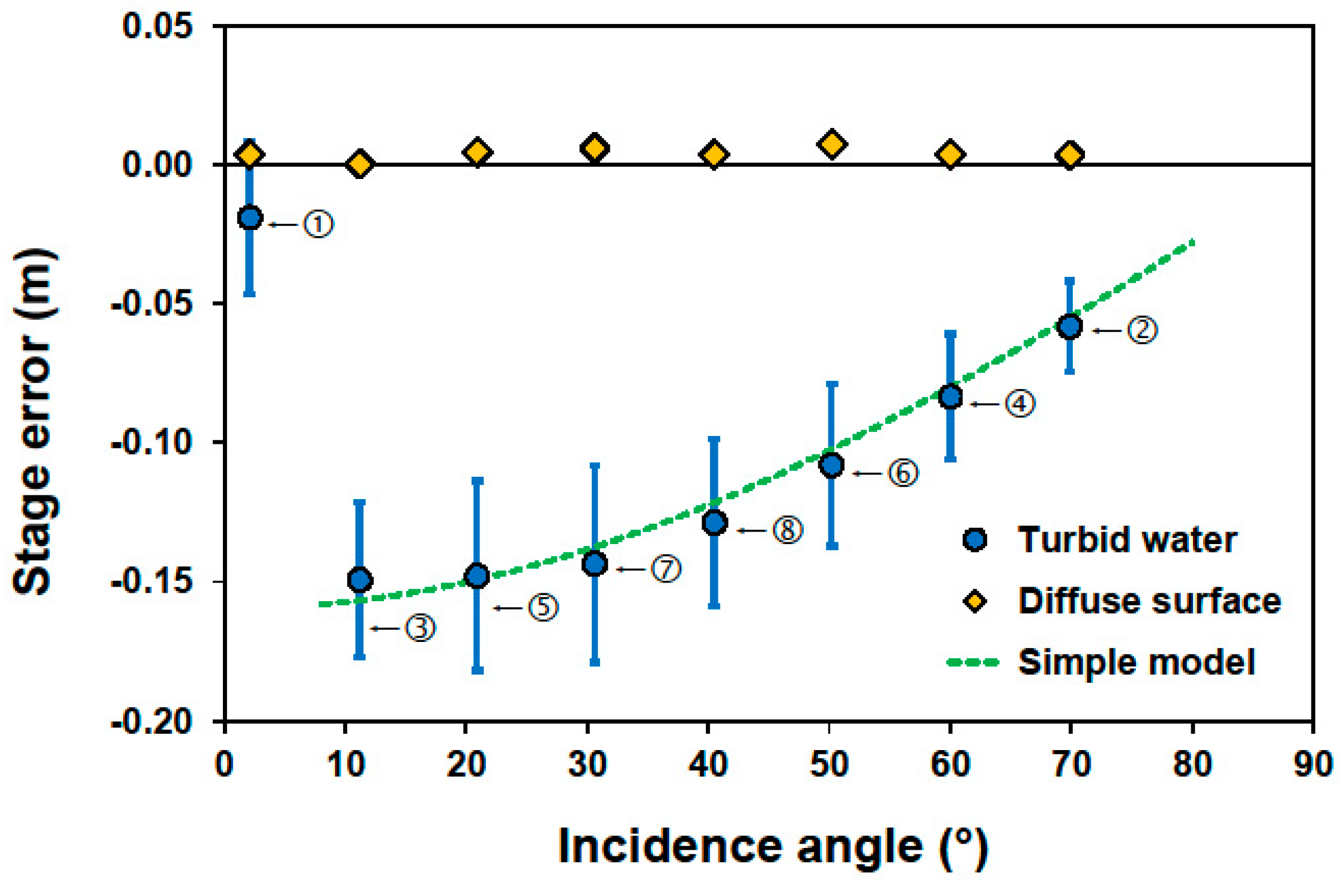
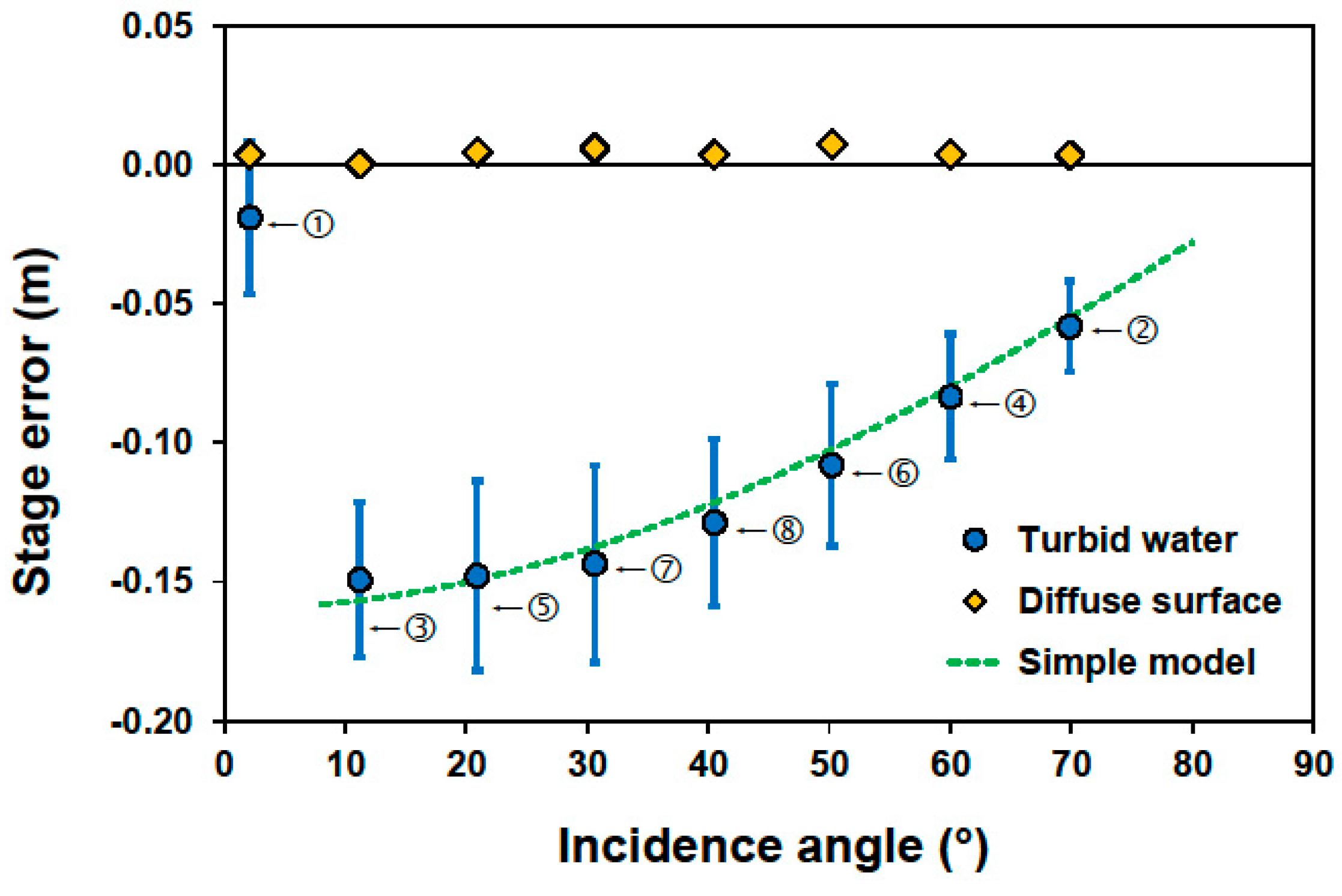
4.1.2. Effects of the Lidar Incidence Angle and Water Transparency
4.2. Field Results
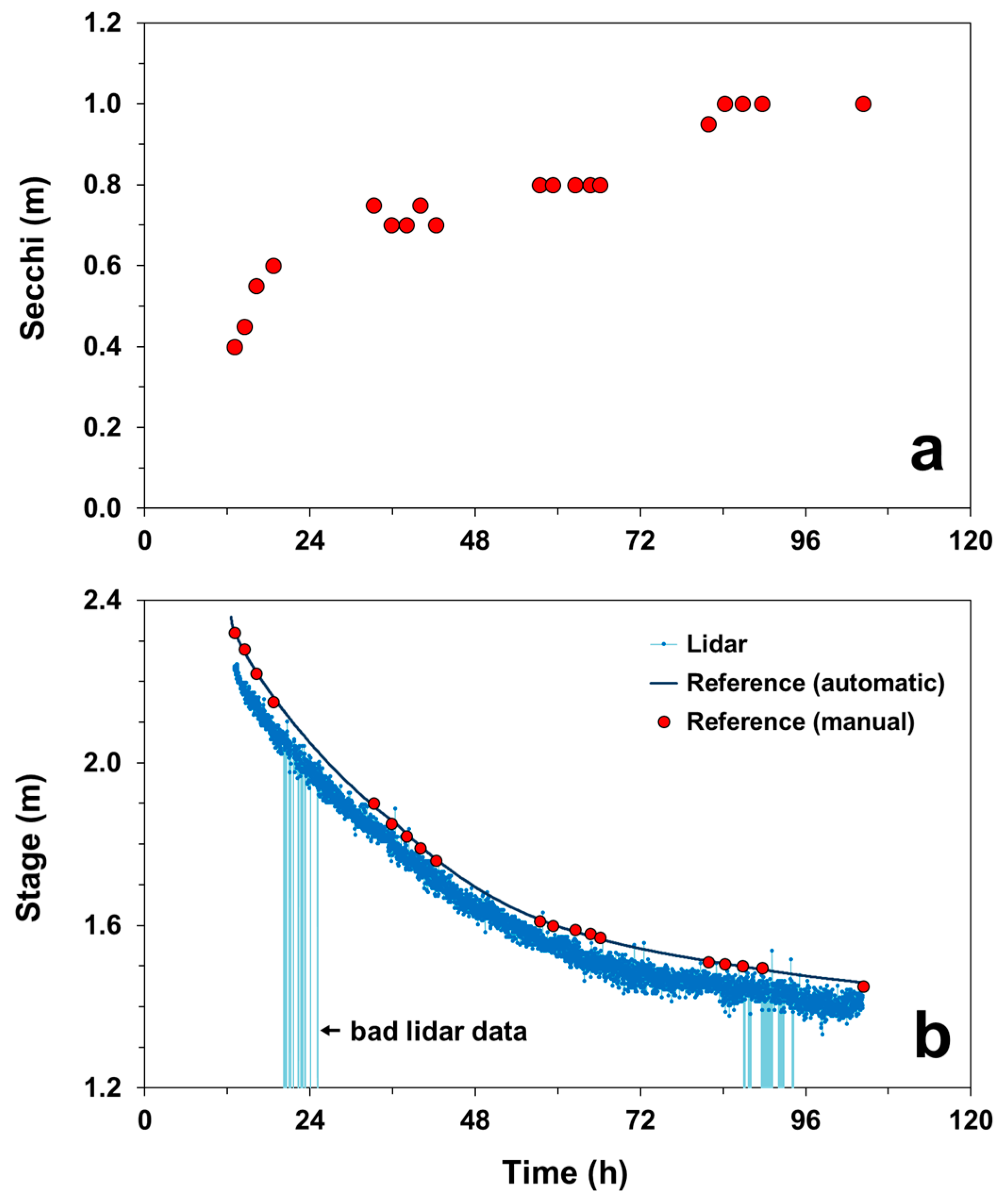
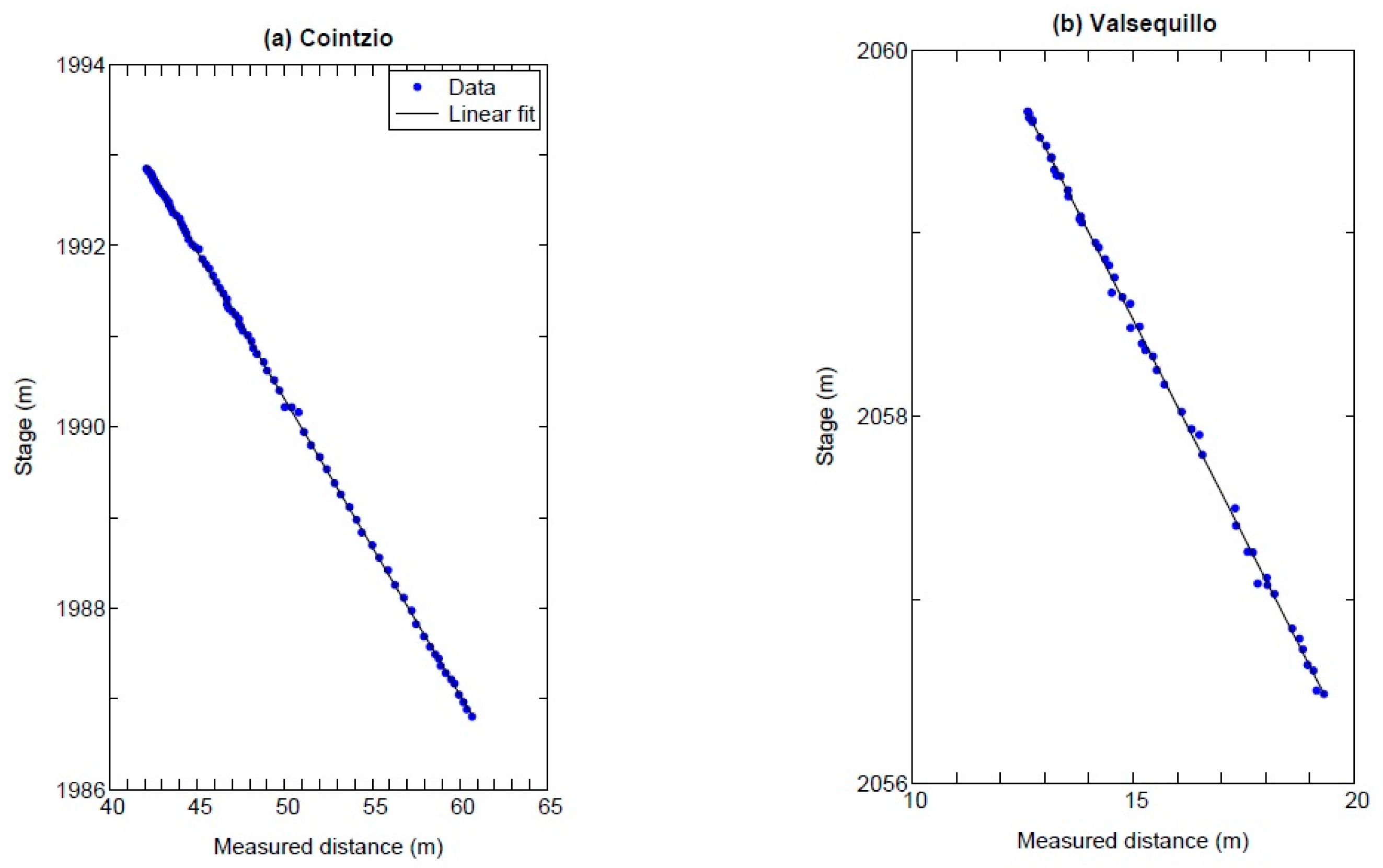
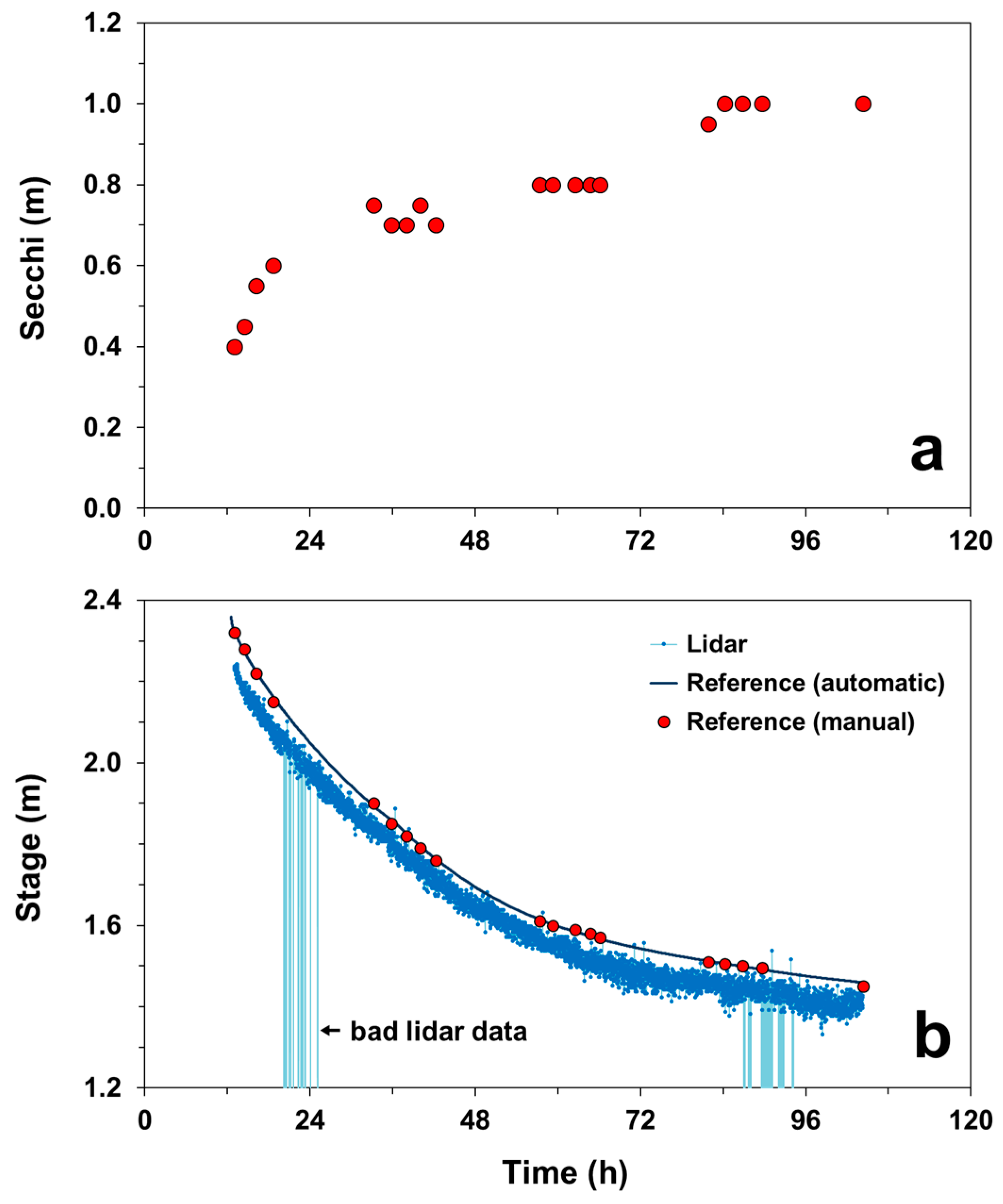
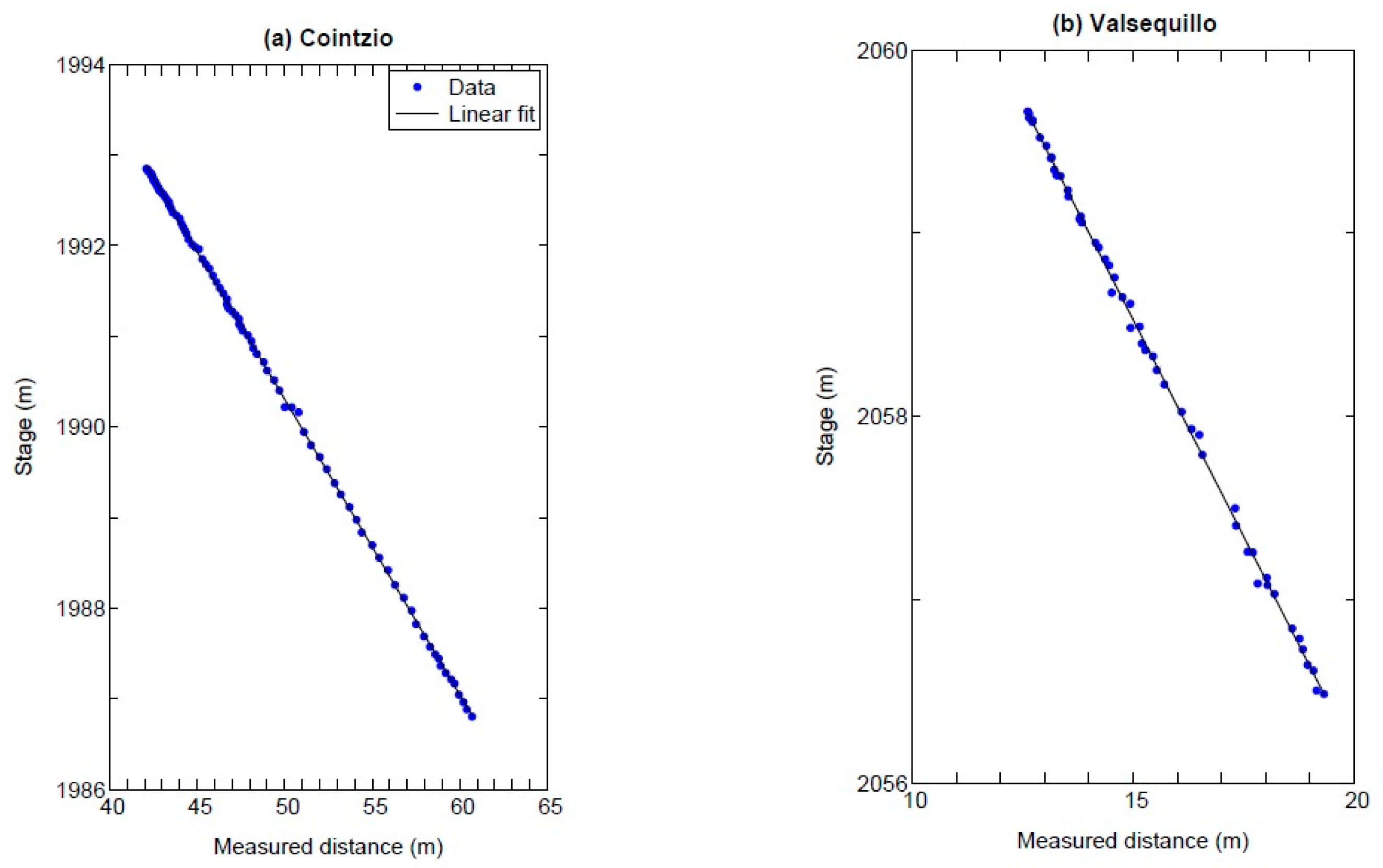
4.2.1. Raw-Data Filtering and Field Calibration
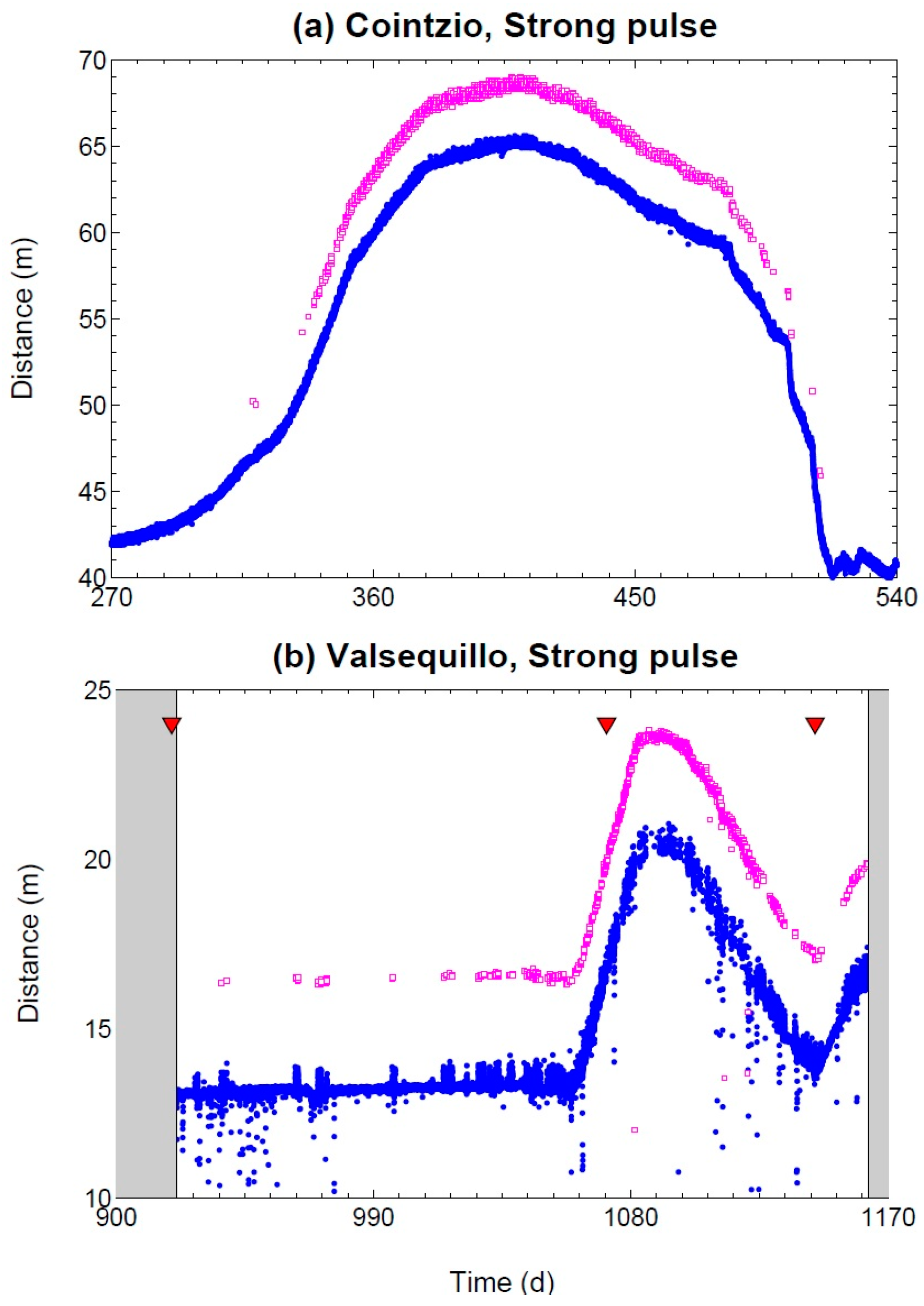
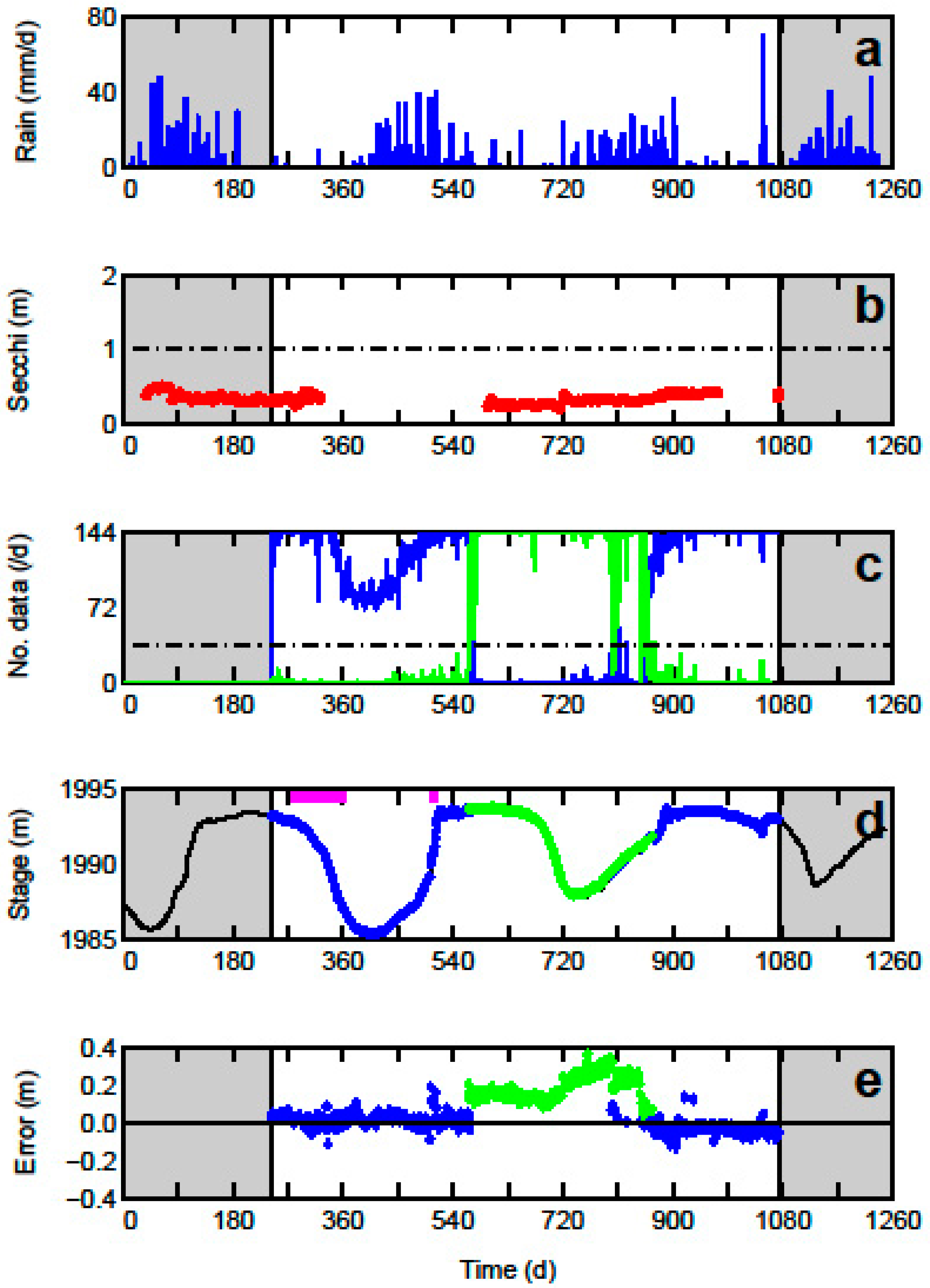
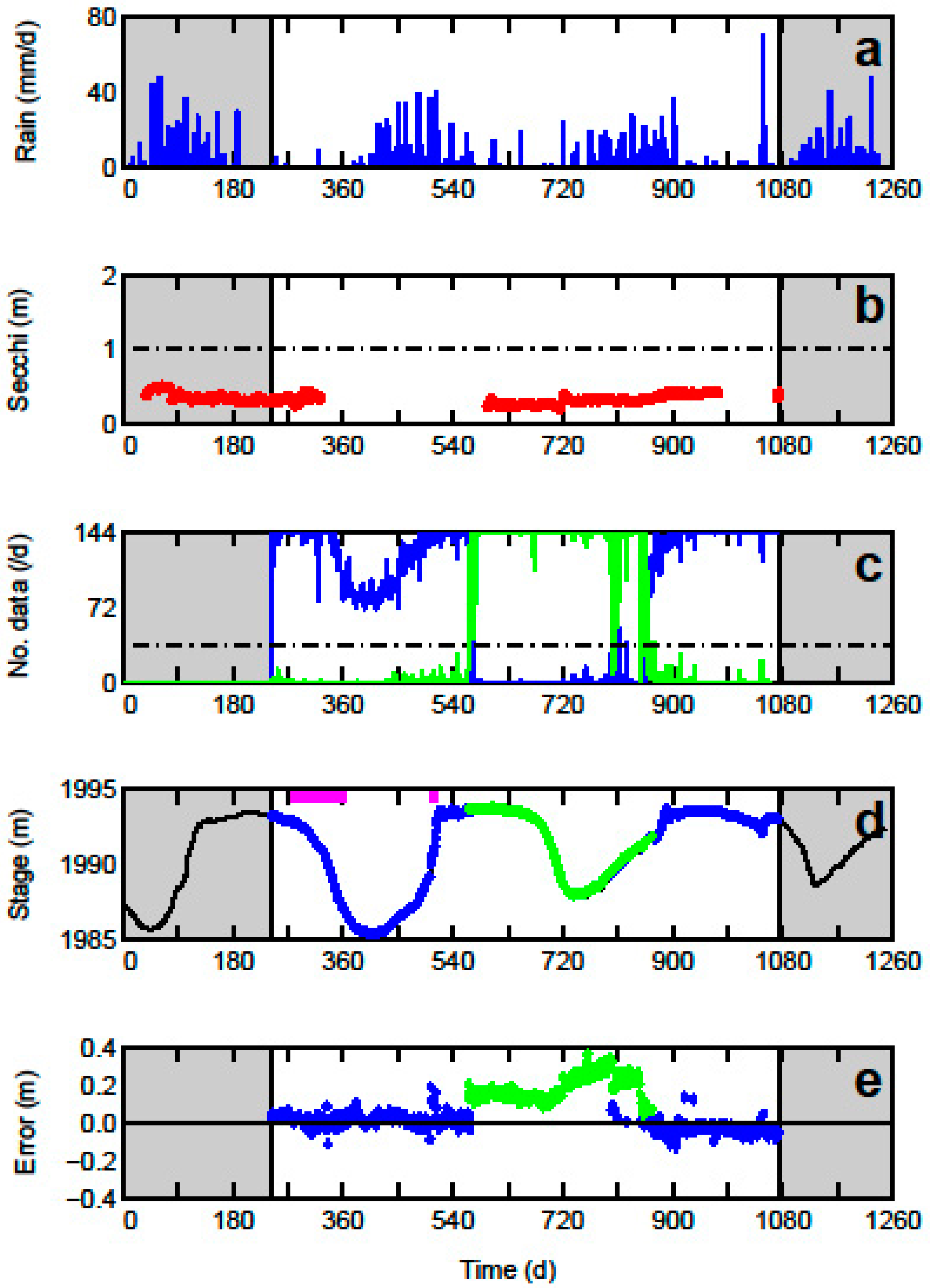
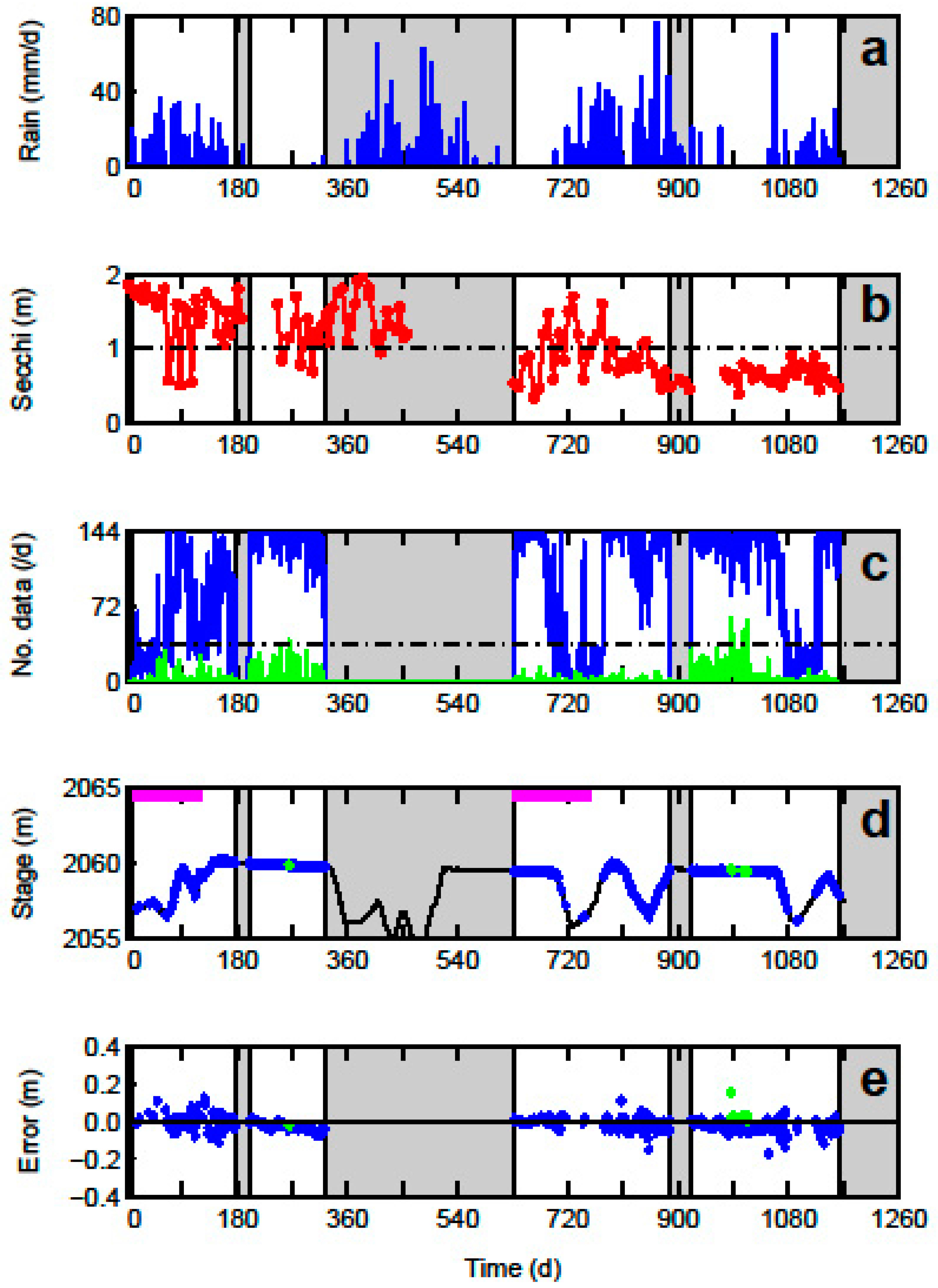
4.2.2. Stage Estimation
4.3. Discussion
4.3.1. Reliability of the Proposed Technique for Stage Monitoring in Turbid Reservoirs
4.3.2. Other Potential Applications of the Proposed Technique
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
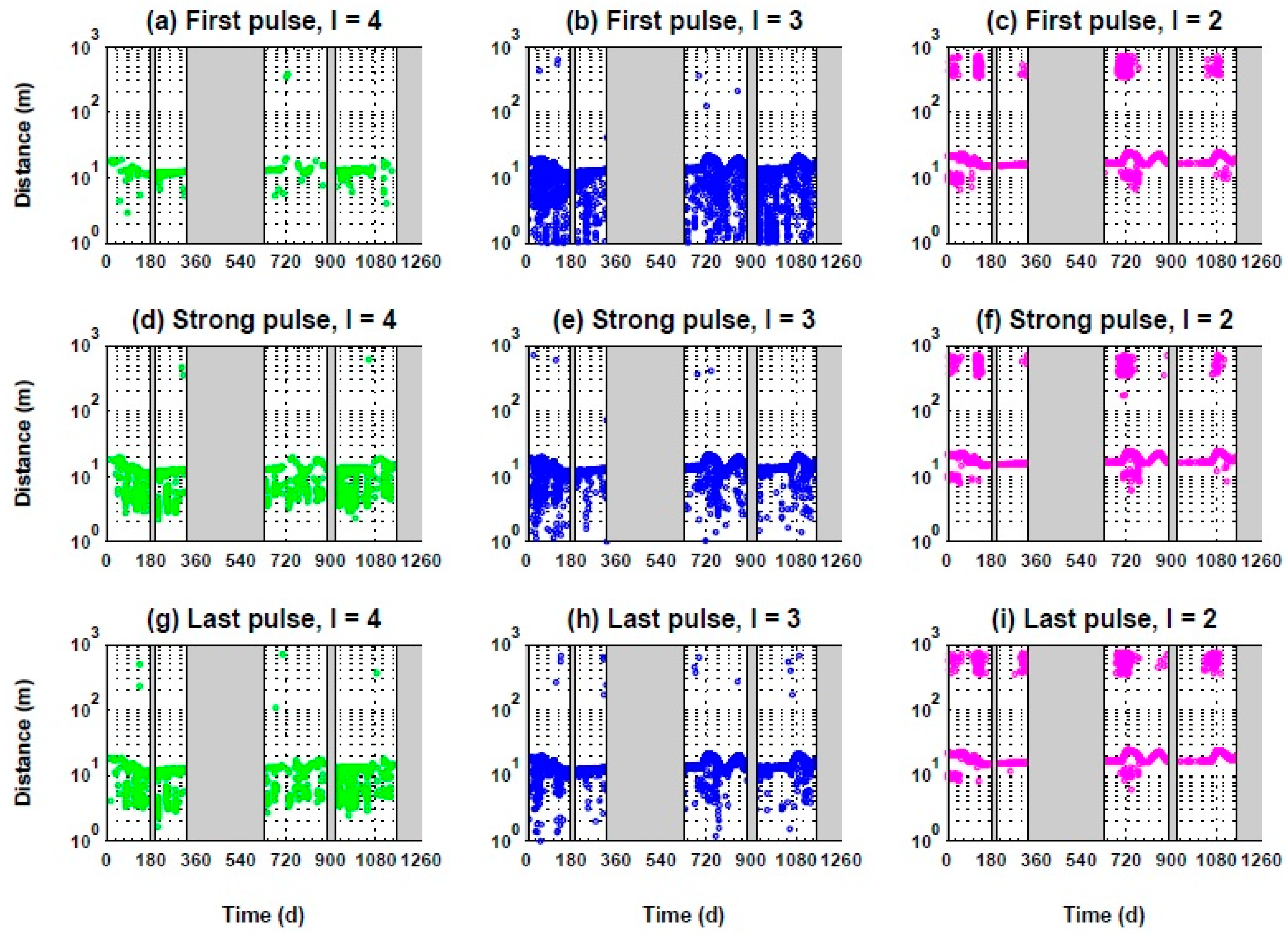
Appendix A—Unexplained Lidar Returns Associated with a Low Signal Strength
Appendix B—Small Daily Oscillations of the Lidar Data Associated to a Moderate Signal Strength
References
- Tamari, S.; Mory, J.; Guerrero-Meza, V. Testing a near-infrared Lidar mounted with a large incidence angle to monitor the water level of turbid reservoirs. ISPRS J. Photogramm. Remote Sens. 2011, 66, S85–S91. [Google Scholar] [CrossRef]
- Churnside, J.H.; Palmer, A.J. Δk Lidar sensing of surface waves in a wave tank. Appl. Opt. 1993, 32, 339–342. [Google Scholar] [CrossRef] [PubMed]
- Milan, D.J.; Heritage, G.L.; Large, A.R.G.; Entwistle, N.S. Mapping hydraulic biotopes using terrestrial laser scan data of water surface properties. Earth Surf. Process. Landf. 2010, 35, 918–931. [Google Scholar] [CrossRef]
- Smith, M.W.; Vericat, D. Evaluating shallow-water bathymetry from through-water terrestrial laser scanning under a range of hydraulic and physical water quality conditions. River Res. Appl. 2014, 30, 905–924. [Google Scholar] [CrossRef]
- Blenkinsopp, C.E.; Turner, I.L.; Allis, M.J.; Peirson, W.L.; Garden, L.E. Application of Lidar technology for measurement of time-varying free-surface profiles in a laboratory wave flume. Coast. Eng. 2012, 68, 1–5. [Google Scholar] [CrossRef]
- Streicher, M.; Hofland, B.; Lindenbergh, R.C. Laser ranging for monitoring water waves in the new Deltares Delta Flume. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 271–276. [Google Scholar] [CrossRef]
- Hofland, B.; Diamantidou, E.; van Steeg, P.; Meys, P. Wave runup and wave overtopping measurements using a laser scanner. Coast. Eng. 2015, 106, 20–29. [Google Scholar] [CrossRef]
- Berkovic, G.; Shafir, E. Optical methods for distance and displacement measurements. Adv. Opt. Photon. 2012, 4, 441–471. [Google Scholar] [CrossRef]
- Guenther, G.C. Wind and nadir angle effects on airborne Lidar water surface returns. Proc. SPIE 1986. [Google Scholar] [CrossRef]
- Guenther, G.C.; Cunningham, A.G.; LaRocque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne bathymetry. In Proceedings of the 20th EARSeL Symposium: SIG Workshop on Lidar Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000.
- Höfle, B.; Vetter, M.; Pfeifer, N.; Mandlburger, G.; Stötter, J. Water surface mapping from airborne laser scanning using signal intensity and elevation data. Earth Surf. Process. Landf. 2009, 34, 1635–1649. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 175–180. [Google Scholar] [CrossRef]
- Doxaran, D.; Froidefond, J.M.; Lavender, S.; Castaing, P. Spectral signature of highly turbid waters Application with SPOT data to quantify suspended particulate matter concentrations. Remote Sens. Environ. 2002, 81, 149–161. [Google Scholar] [CrossRef]
- Li, Z.; Lemmerz, C.; Paffrath, U.; Reitebuch, O.; Witschas, B. Airborne Doppler Lidar investigation of sea surface reflectance at a 355-nm ultraviolet wavelength. J. Atmos. Ocean. Technol. 2010, 27, 693–704. [Google Scholar] [CrossRef]
- Laser Technology Inc. TrueSense S200 Series: User’s Manual, 7th ed.; Laser Technology Inc.: Centennial, CO, USA, 2014; Available online: www.lasertech.com/Laser-Sensors.aspx (accessed on 19 June 2016).
- Tamari, S.; Laportes-Vergnes, A.; Salgado, G. Banco de prueba sencillo para verificar distanciómetros Láser de bolsillo. In Proceedings of the Simposio de Metrología 2010, Querétaro, Mexico, 27–29 October 2010.
- Davies-Colley, R.J.; Smith, D.G. Turbidity, suspended sediment, and water clarity: A review. JAWRA 2001, 37, 1085–1101. [Google Scholar]
- Kent State University. The Secchi Dip-In. Available online: www.secchidipin.org (accessed on 19 June 2016).
- Susperregui, A.S.; Gratiot, N.; Esteves, M.; Prat, C. A preliminary hydrosedimentary view of a highly turbid, tropical, manmade lake: Cointzio Reservoir (Michoacán, Mexico). Lakes Reserv. Res. Manag. 2009, 14, 31–39. [Google Scholar]
- Kristensen, P.; Søndergaard, M.; Jeppesen, E. Resuspension in a shallow eutrophic lake. Hydrobiologia 1992, 228, 101–109. [Google Scholar] [CrossRef]
- Alcocer, J.; Bernal-Brooks, F.W. Limnology in Mexico. Hydrobiologia 2010, 644, 1–54. [Google Scholar] [CrossRef]
- Dodds, W.K.; Carney, E.; Angelo, R.T. Determining ecoregional reference conditions for nutrients, Secchi depth and chlorophyll-a in Kansas lakes and reservoirs. Lake Reserv. Manag. 2006, 22, 151–159. [Google Scholar] [CrossRef]
- Nürnberg, G.K. Trophic state of clear and colored, soft- and hardwater lakes with special consideration of nutrients, anoxia, phytoplankton and fish. Lake Reserv. Manag. 1996, 12, 432–447. [Google Scholar] [CrossRef]
- Sauer, V.B.; Turnipseed, D.P. Stage Measurement at Gaging Stations; U.S. Geological Survey: Reston, VA, USA, 2010.
- Vousdoukas, M.I.; Kirupakaramoorthy, T.; Oumeraci, H.; De La Torre, M.; Wübbold, F.; Wagner, B.; Schimmels, S. The role of combined laser scanning and video techniques in monitoring wave-by-wave swash zone processes. Coast. Eng. 2014, 83, 150–165. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Zang, J. Monitoring individual wave characteristics in the inner surf with a 2-Dimensional laser scanner (Lidar). J. Sens. 2016, 2016, 7965431. [Google Scholar] [CrossRef]
- Tamari, S.; Guerrero-Meza, V. Flash flood monitoring with an inclined Lidar installed at a river bank: Proof of concept. Remote Sens. 2016, 8, 834. [Google Scholar] [CrossRef]
- Marsh, L.B.; Heckman, D.B. Open Channel Flowmeter Utilizing Surface Velocity and Lookdown Level Devices. U.S. Patent No. 5,811,688, 22 September 1998. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reservoir | Cointzio | Valsequillo | |
|---|---|---|---|
| Numbers of days during which the Lidar detected something related to the water surface (d) | Nothing detected | 0 (0%) | 193 (24%) |
| Detection of water (sub-) surface | 542 (65%) | 588 (75%) | |
| Detection of both water and objects | 9 (1%) | 8 (1%) | |
| Detection of floating objects only | 279 (34%) | 0 (0%) | |
| Difference between stage estimation by the inclined Lidar and reference data (m) 1 | Mean difference (b) | −0.005 | −0.023 |
| Standard deviation (s) | 0.042 | 0.031 | |
| Symmetric coverage interval 2 | ±0.085 | ±0.078 | |
| Minimum difference | −0.132 | −0.173 | |
| Maximum difference | 0.187 | 0.121 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamari, S.; Guerrero-Meza, V.; Rifad, Y.; Bravo-Inclán, L.; Sánchez-Chávez, J.J. Stage Monitoring in Turbid Reservoirs with an Inclined Terrestrial Near-Infrared Lidar. Remote Sens. 2016, 8, 999. https://doi.org/10.3390/rs8120999
Tamari S, Guerrero-Meza V, Rifad Y, Bravo-Inclán L, Sánchez-Chávez JJ. Stage Monitoring in Turbid Reservoirs with an Inclined Terrestrial Near-Infrared Lidar. Remote Sensing. 2016; 8(12):999. https://doi.org/10.3390/rs8120999
Chicago/Turabian StyleTamari, Serge, Vicente Guerrero-Meza, Younès Rifad, Luis Bravo-Inclán, and José Javier Sánchez-Chávez. 2016. "Stage Monitoring in Turbid Reservoirs with an Inclined Terrestrial Near-Infrared Lidar" Remote Sensing 8, no. 12: 999. https://doi.org/10.3390/rs8120999