Figure 1.
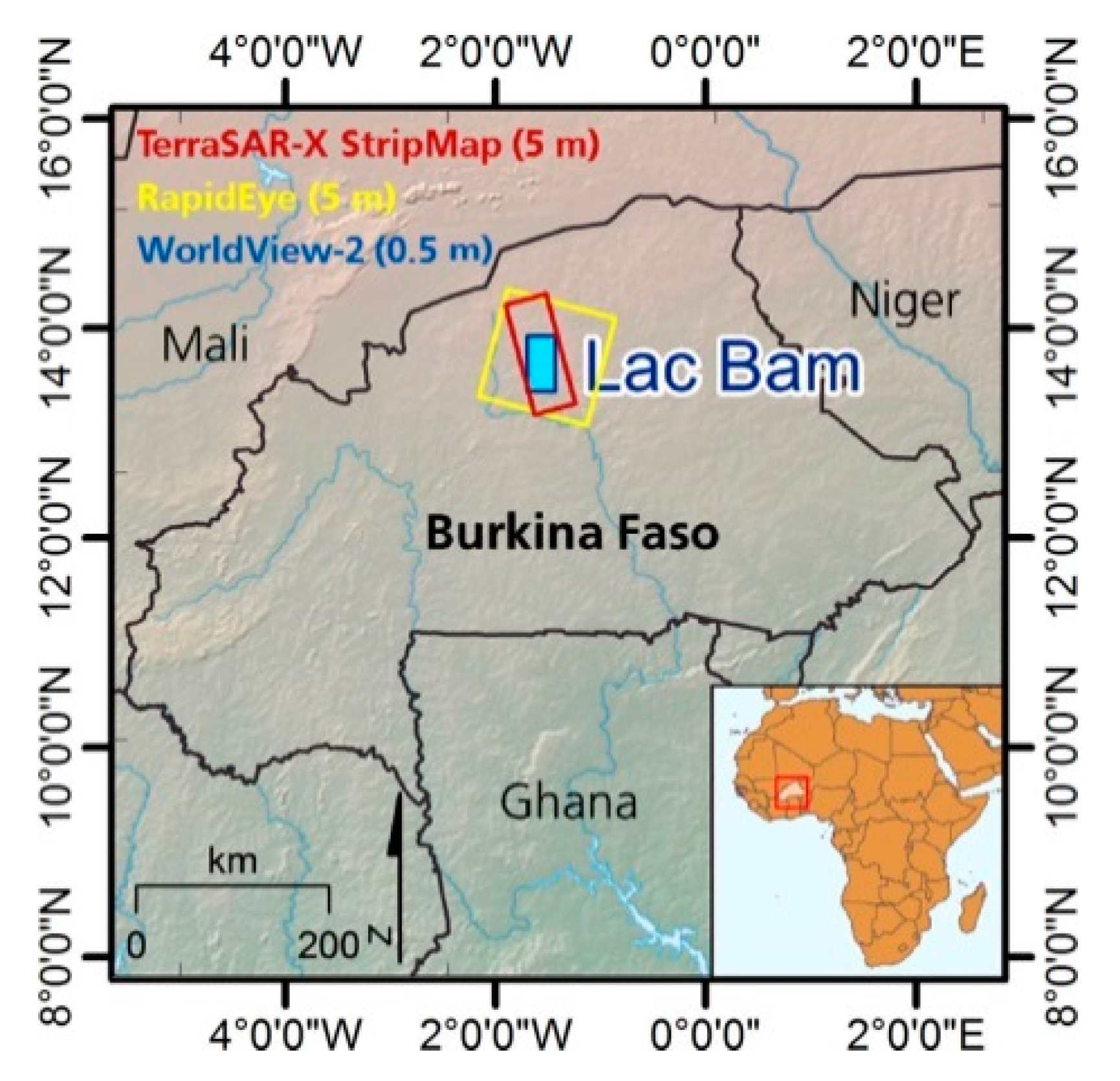
Study area: Lac Bam in Burkina Faso, West Africa, and footprint of the used datasets: TerraSAR-X (dark red), RapidEye (yellow), and WorldView-2 (blue).
Figure 1.
Study area: Lac Bam in Burkina Faso, West Africa, and footprint of the used datasets: TerraSAR-X (dark red), RapidEye (yellow), and WorldView-2 (blue).
Figure 2.
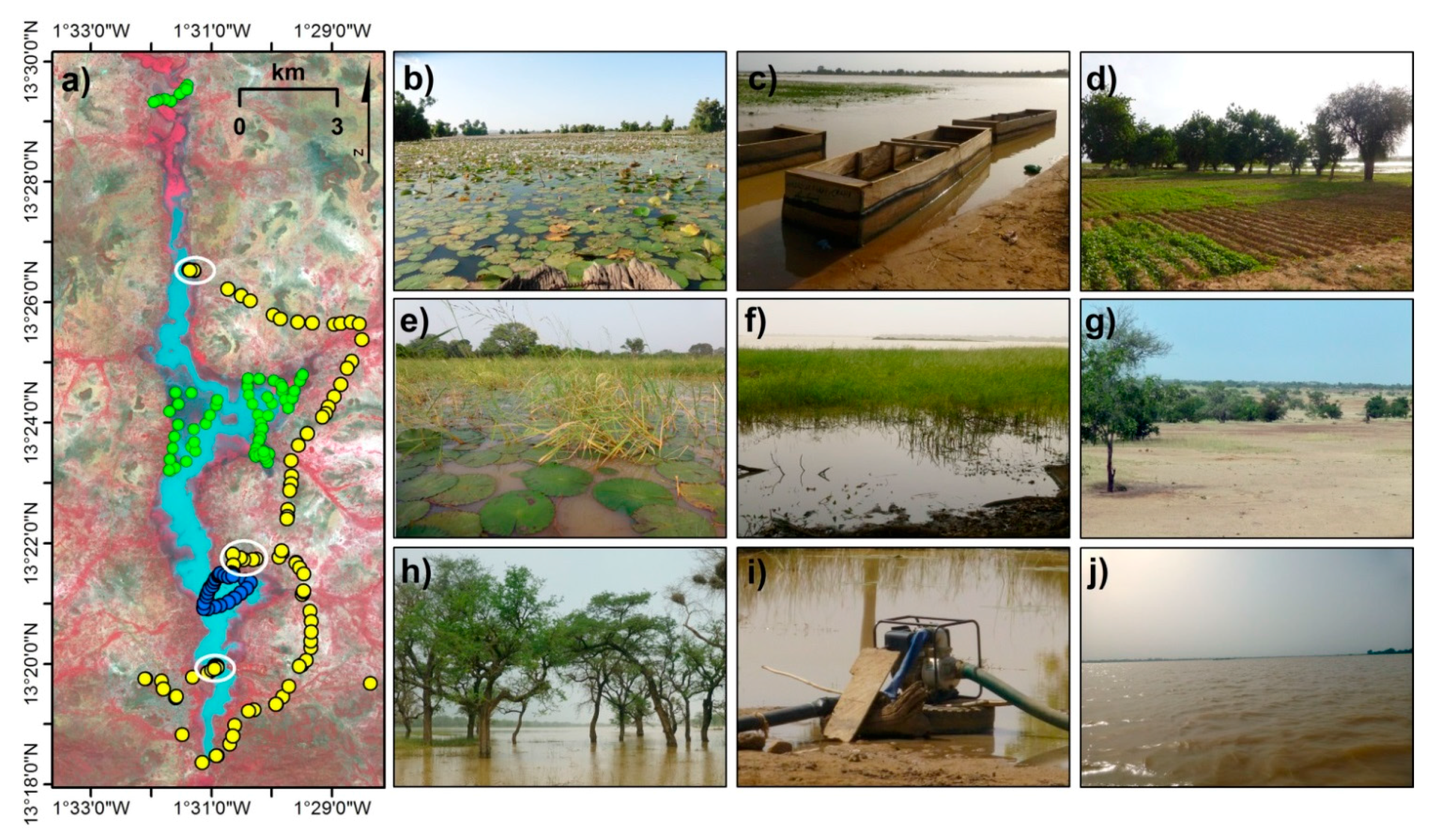
(a) Location of the GPS data (from 15–18 October 2013 to 25–28 October 2015) with the (a) RapidEye image from 19 October 2013 as backdrop (©BlackBridge 2013, Berlin, Germany), including areas visited in greater detail (white circles), GPS/photo points on land (yellow dots), GPS/photo points from the boat tracks on the open water (blue dots), and on water with flooded vegetation (green dots); (b) floating water lilies; (c) shoreline including soil exposed after water retreat and flooded vegetation in the background; (d) irrigated fields; (e) flooded and floating vegetation; (f) water, flooded vegetation, and an island in the background, seen from the eastern shoreline; (g) barren land; (h) flooded trees next to the dam in the south; (i) motor pump at the shoreline; (j) open water seen from the boat southwards, (photos by L. Moser, F. Betorz Martìnez, R. Ouedraogo).
Figure 2.
(a) Location of the GPS data (from 15–18 October 2013 to 25–28 October 2015) with the (a) RapidEye image from 19 October 2013 as backdrop (©BlackBridge 2013, Berlin, Germany), including areas visited in greater detail (white circles), GPS/photo points on land (yellow dots), GPS/photo points from the boat tracks on the open water (blue dots), and on water with flooded vegetation (green dots); (b) floating water lilies; (c) shoreline including soil exposed after water retreat and flooded vegetation in the background; (d) irrigated fields; (e) flooded and floating vegetation; (f) water, flooded vegetation, and an island in the background, seen from the eastern shoreline; (g) barren land; (h) flooded trees next to the dam in the south; (i) motor pump at the shoreline; (j) open water seen from the boat southwards, (photos by L. Moser, F. Betorz Martìnez, R. Ouedraogo).
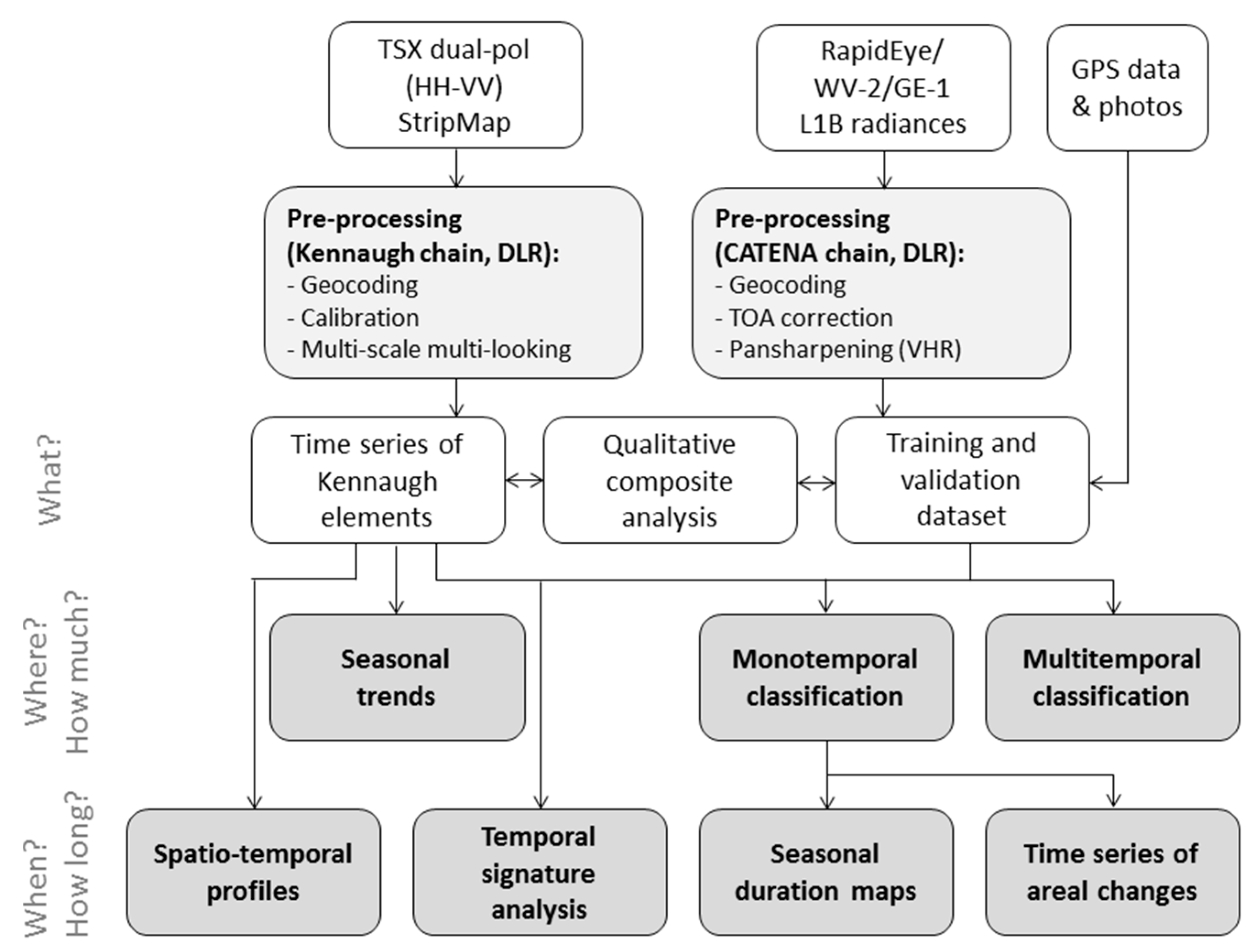
Figure 3.
Processing workflow.
Figure 3.
Processing workflow.
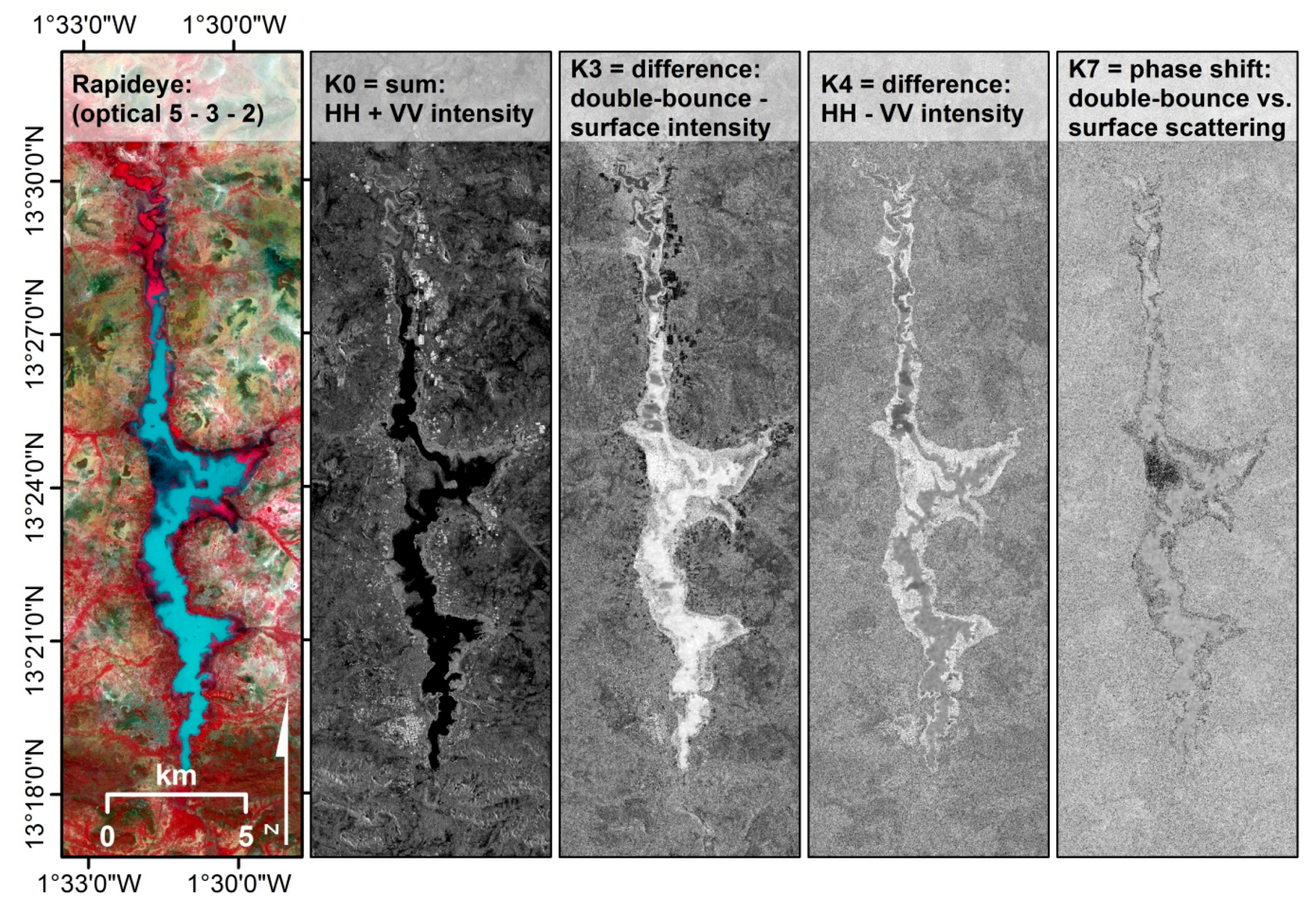
Figure 4.
From left to right: A RapidEye false color composite (band 5-3-2, i.e., NIR-red-green) reference image from 19 October 2013 (©BlackBridge 2013); the four Kennaugh elements derived from the dual-pol TSX image from 20 October 2013 (©DLR 2013): K0 (the total intensity as sum of HH plus VV intensity); K3 (difference double-bounce minus surface scattering); K4 (difference HH minus VV intensity); K7 (phase shift between double-bounce and surface scattering).
Figure 4.
From left to right: A RapidEye false color composite (band 5-3-2, i.e., NIR-red-green) reference image from 19 October 2013 (©BlackBridge 2013); the four Kennaugh elements derived from the dual-pol TSX image from 20 October 2013 (©DLR 2013): K0 (the total intensity as sum of HH plus VV intensity); K3 (difference double-bounce minus surface scattering); K4 (difference HH minus VV intensity); K7 (phase shift between double-bounce and surface scattering).
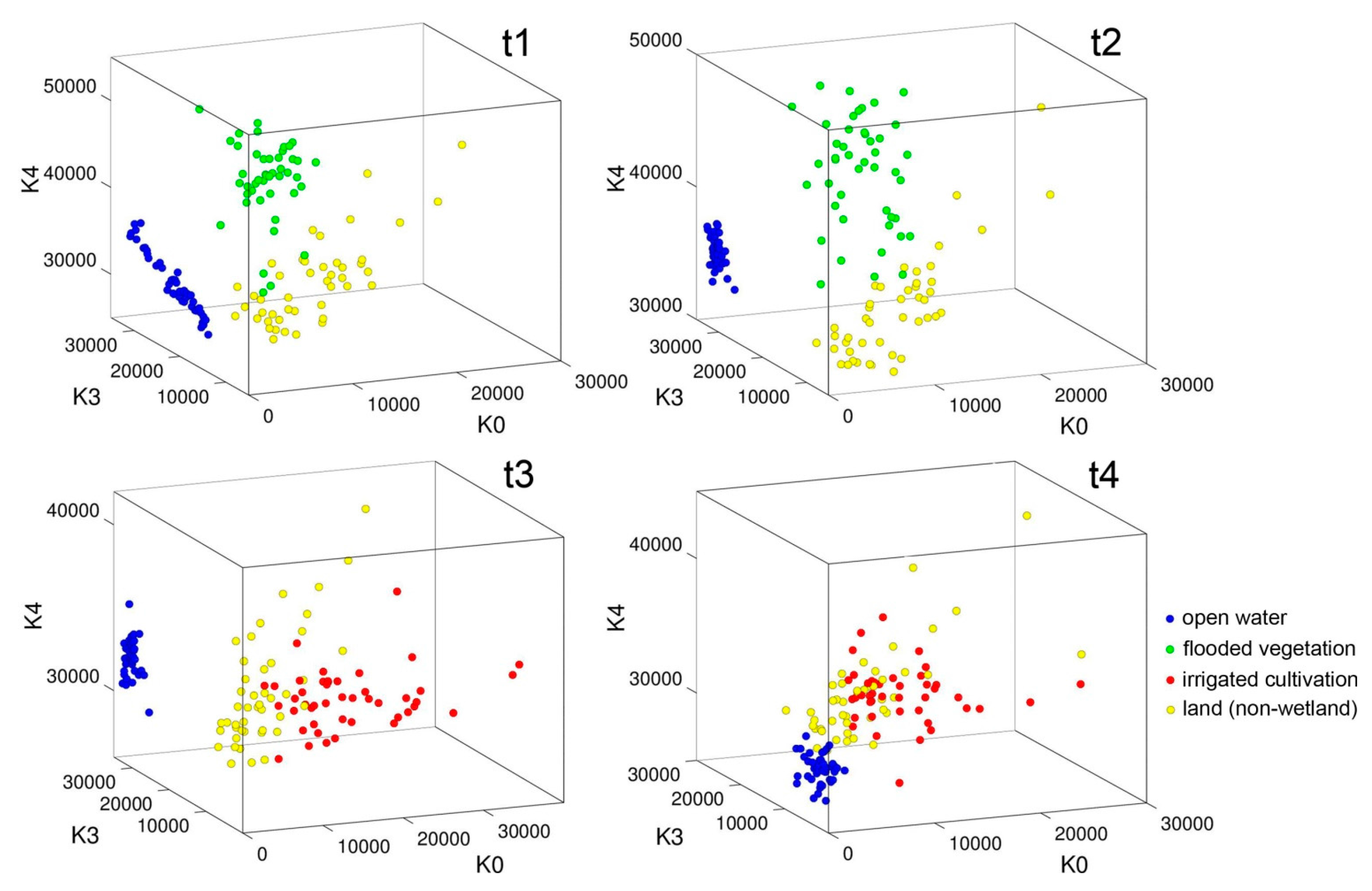
Figure 5.
Scatterplots for the Kennaugh elements K0, K3, and K4 displaying the mean value of each class of all 135 training and validation areas per time step: open water (blue), flooded vegetation (green), irrigated cultivation (red), and land (yellow), for four time steps (t1–t4). The Kennaugh elements are displayed in normalized scaling to 16 bit unsigned integer.
Figure 5.
Scatterplots for the Kennaugh elements K0, K3, and K4 displaying the mean value of each class of all 135 training and validation areas per time step: open water (blue), flooded vegetation (green), irrigated cultivation (red), and land (yellow), for four time steps (t1–t4). The Kennaugh elements are displayed in normalized scaling to 16 bit unsigned integer.
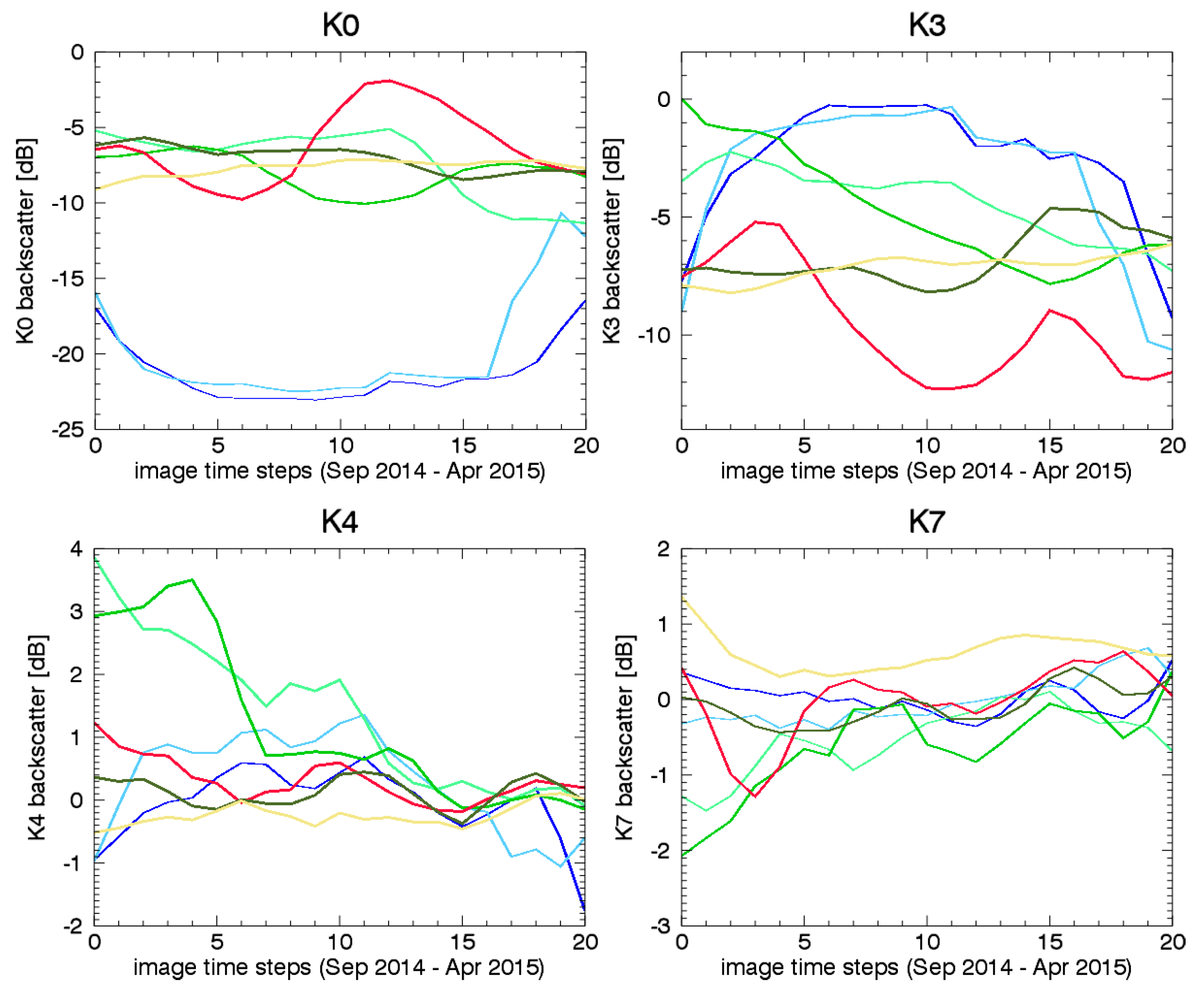
Figure 6.
Temporal signature analysis from September 2014 until April 2015 for the Kennaugh elements K0, K3, K4, and K7: W (dark blue); W–L (light blue); V–L (light green); V–F (green); L–F/F–L (dark red); L1 (dark green); L2 (beige).
Figure 6.
Temporal signature analysis from September 2014 until April 2015 for the Kennaugh elements K0, K3, K4, and K7: W (dark blue); W–L (light blue); V–L (light green); V–F (green); L–F/F–L (dark red); L1 (dark green); L2 (beige).
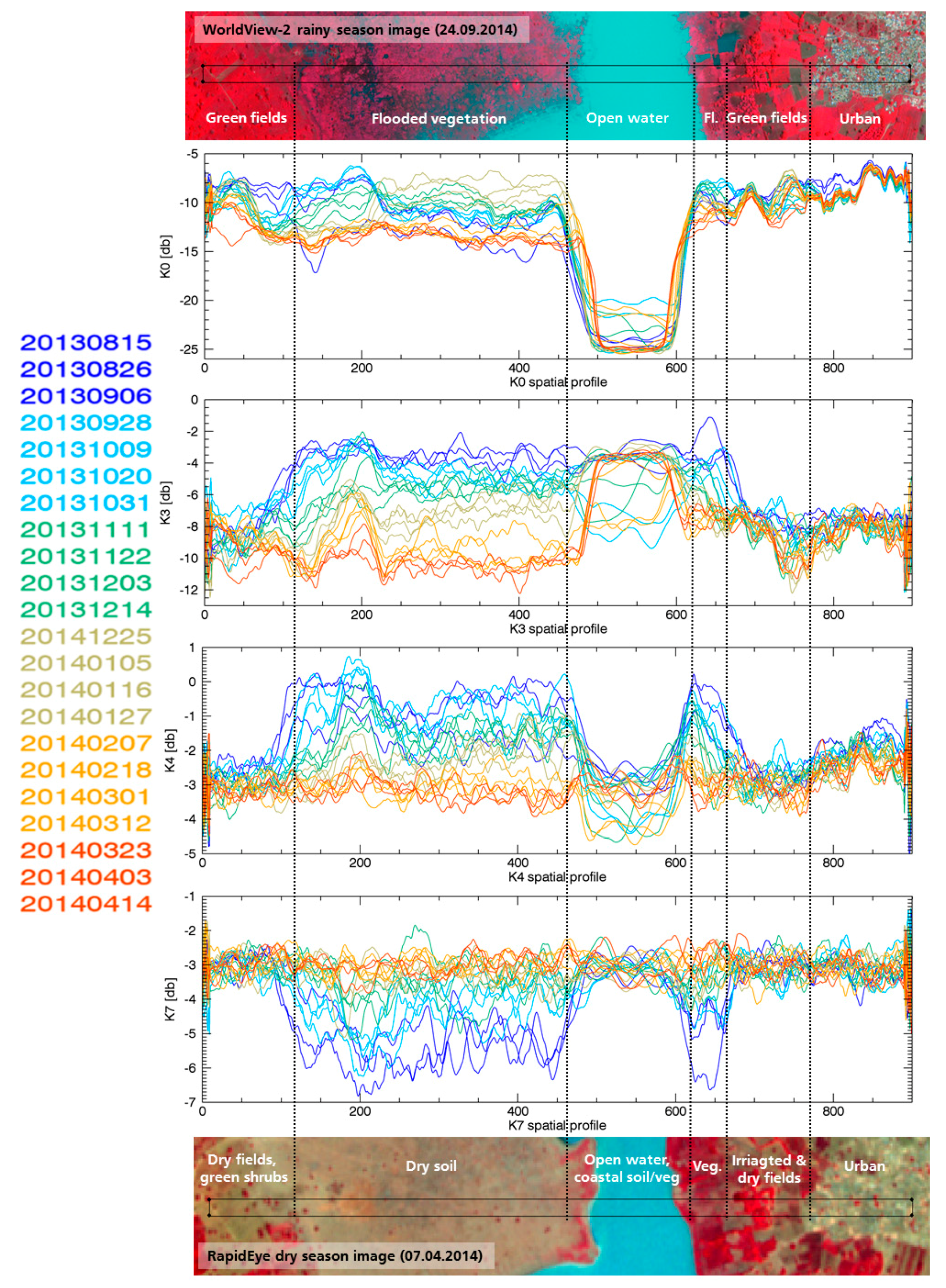
Figure 7.
Spatio-temporal profiles for different land cover types along the spatial profile with time steps of TSX Kennaugh elements visualized in the color scale. Optical reference images from WorldView-2 (24 September 2014) (©DigitalGlobe 2014 provided by EUSI, Westminster, CO, USA), and RapidEye (7 April 2015) (©BlackBridge 2014, Berlin, Germany) define the land cover during the start and end point of the temporal development.
Figure 7.
Spatio-temporal profiles for different land cover types along the spatial profile with time steps of TSX Kennaugh elements visualized in the color scale. Optical reference images from WorldView-2 (24 September 2014) (©DigitalGlobe 2014 provided by EUSI, Westminster, CO, USA), and RapidEye (7 April 2015) (©BlackBridge 2014, Berlin, Germany) define the land cover during the start and end point of the temporal development.
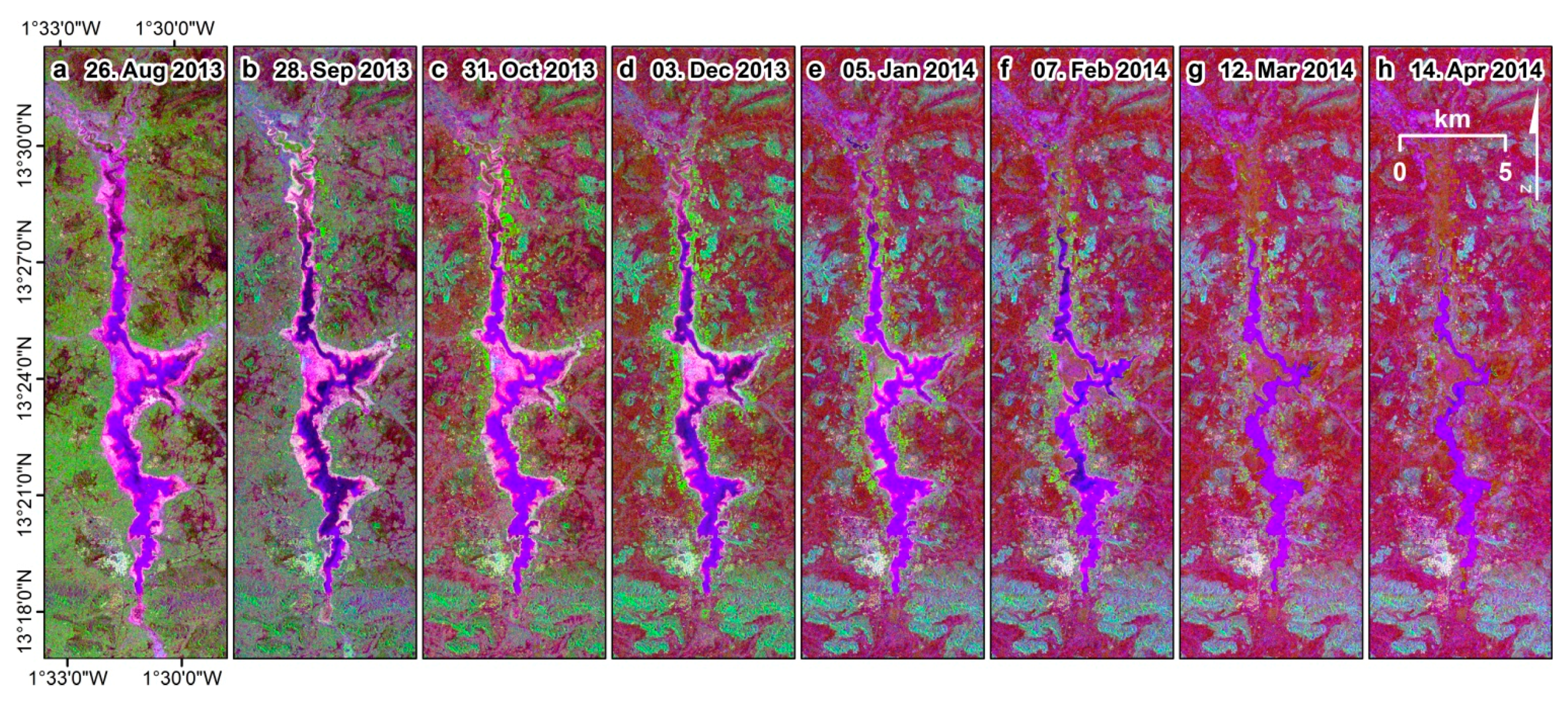
Figure 8.
Time series of eight selected HH-VV polarized TerraSAR-X (TSX) StripMap acquisitions from (a) 26 August 2013; (b) 28 September 2013; (c) 31 October 2013; (d) 3 December 2013; as well as (e) 5 January 2014; (f) 7 February 2014; (g) 12 March 2014; and (h) 14 April 2014 (©DLR 2013–2015). False color composites have been created from the Kennaugh elements (K4-K0-K3). Open water appears in blue/purple, green colors stand for vegetated or irrigated areas, and pink colors are dominant in areas of flooded vegetation.
Figure 8.
Time series of eight selected HH-VV polarized TerraSAR-X (TSX) StripMap acquisitions from (a) 26 August 2013; (b) 28 September 2013; (c) 31 October 2013; (d) 3 December 2013; as well as (e) 5 January 2014; (f) 7 February 2014; (g) 12 March 2014; and (h) 14 April 2014 (©DLR 2013–2015). False color composites have been created from the Kennaugh elements (K4-K0-K3). Open water appears in blue/purple, green colors stand for vegetated or irrigated areas, and pink colors are dominant in areas of flooded vegetation.
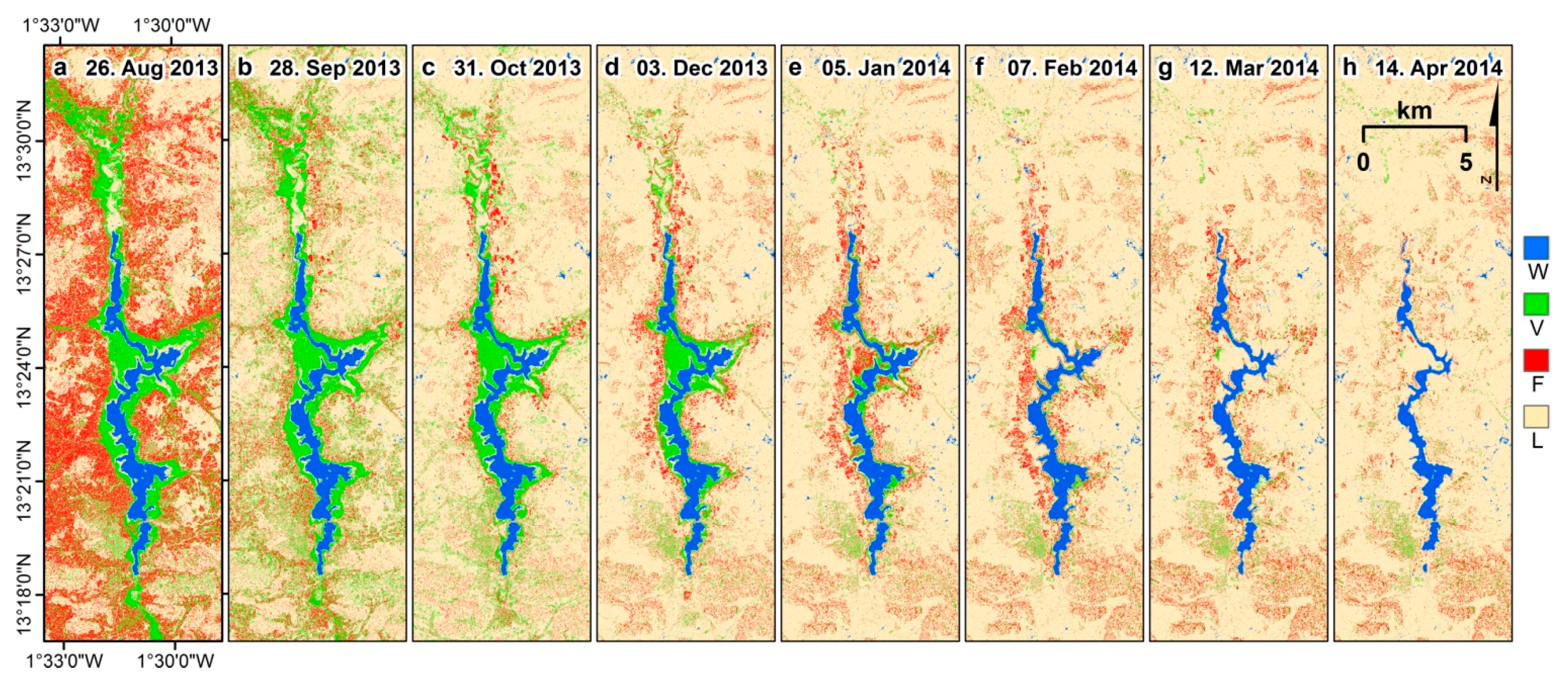
Figure 9.
Monotemporal classification for eight selected time steps with intervals of 33 days between the data: open water (blue); flooded/floating vegetation (green); irrigated fields (red); and dry land (beige) for (a) 26 August 2013; (b) 28 September 2013; (c) 31 October 2013; (d) 3 December 2013; as well as (e) 5 January 2014; (f) 7 February 2014; (g) 12 March 2014; and (h) 14 April 2014.
Figure 9.
Monotemporal classification for eight selected time steps with intervals of 33 days between the data: open water (blue); flooded/floating vegetation (green); irrigated fields (red); and dry land (beige) for (a) 26 August 2013; (b) 28 September 2013; (c) 31 October 2013; (d) 3 December 2013; as well as (e) 5 January 2014; (f) 7 February 2014; (g) 12 March 2014; and (h) 14 April 2014.
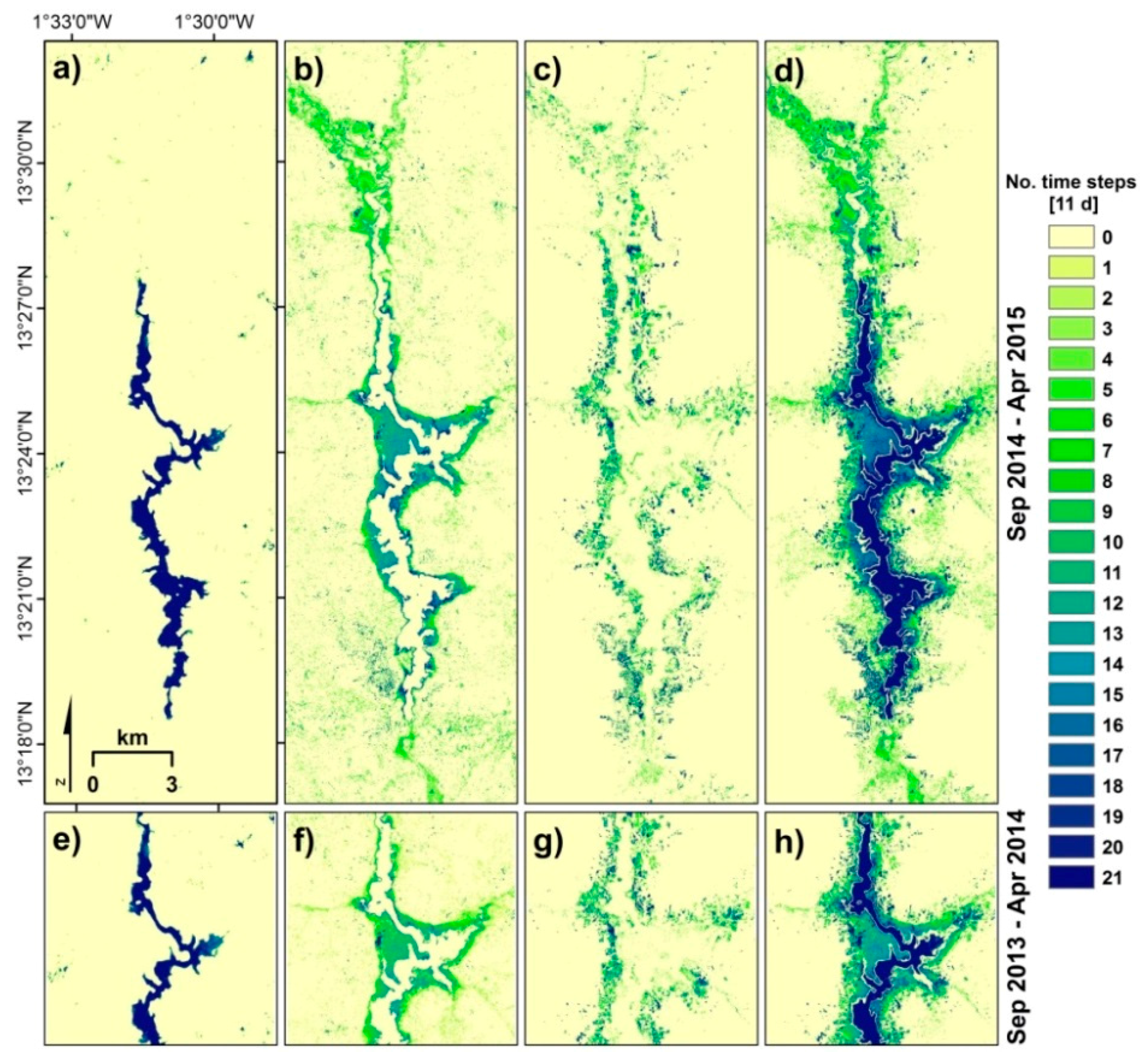
Figure 10.
Cumulative season duration areas of 21 time steps of the year 2014–2015 for (a) open water; (b) flooded/floating vegetation; (c) irrigated fields; and (d) wetland, and (e–h) selected focus region for the year 2013–2014 below.
Figure 10.
Cumulative season duration areas of 21 time steps of the year 2014–2015 for (a) open water; (b) flooded/floating vegetation; (c) irrigated fields; and (d) wetland, and (e–h) selected focus region for the year 2013–2014 below.
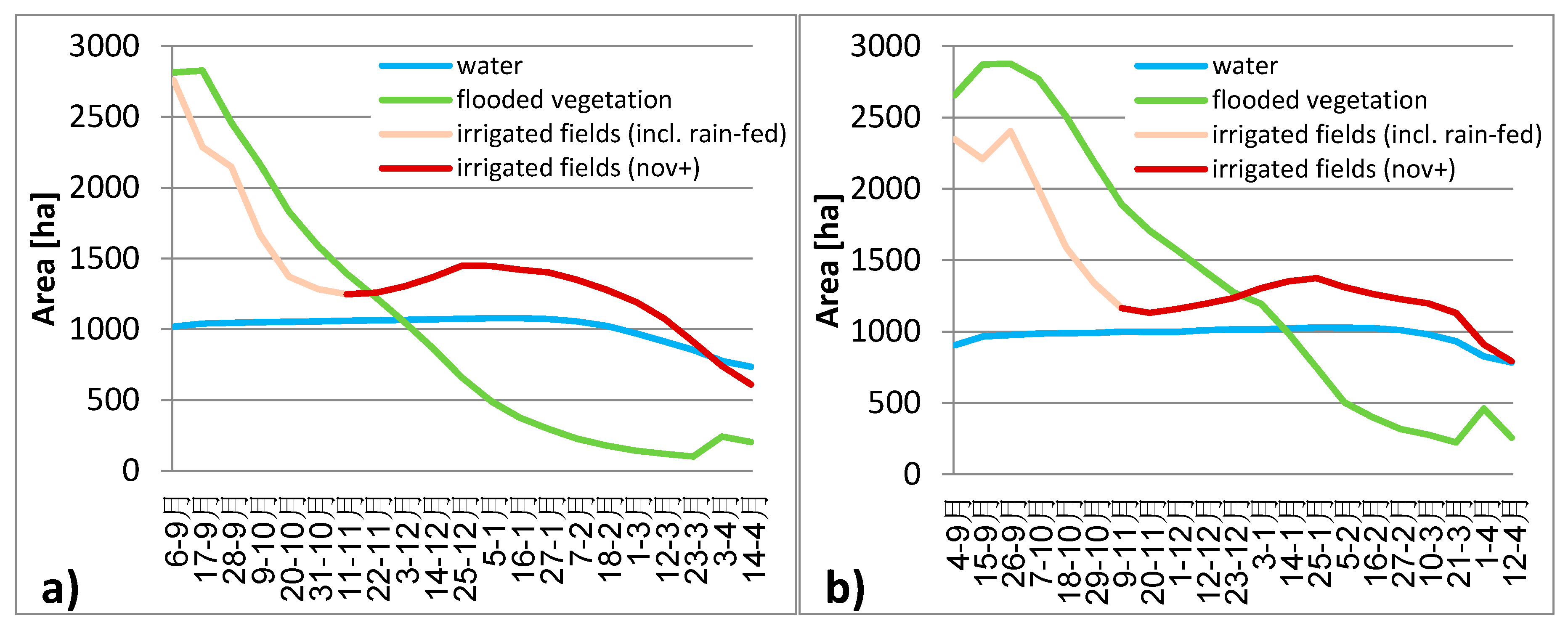
Figure 11.
Time series of the wetland area per class for (a) 2013–2014 and (b) 2014–2015: open water (blue), flooded/floating vegetation (green), irrigated fields (dark red), and rain-fed cultivation (light red).
Figure 11.
Time series of the wetland area per class for (a) 2013–2014 and (b) 2014–2015: open water (blue), flooded/floating vegetation (green), irrigated fields (dark red), and rain-fed cultivation (light red).
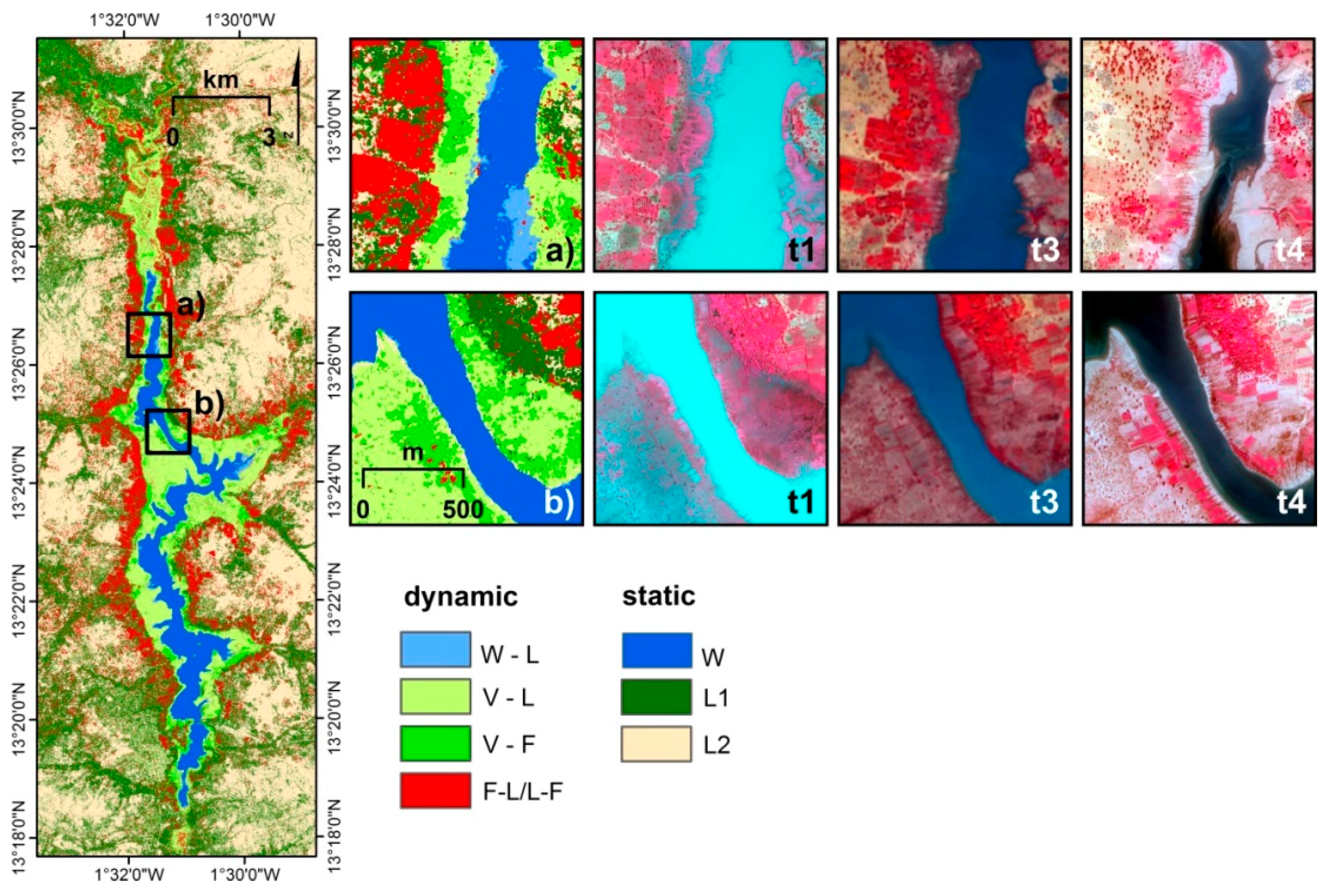
Figure 12.
Multitemporal classification for the time series stack of the year 2014–2015 resulting in seven change classes: open water (W); water to land/soil (W–L); flooded vegetation to land/soil (V–L); flooded vegetation to irrigated fields (V–F); and irrigated fields to land/soil or land/soil to irrigated fields (F–L/L–F); land with permanent vegetation (L1); and land with soil, rock, urban (L2). Two sites representing all classes are displayed in zoom windows: The northern site (a) features open water, the change from water to land, and large areas of cultivation in the east. The centrally located site (b) shows permanent open water, large areas that changed from flooded vegetation to land or to fields, and a permanently vegetated area in the north-east. Optical reference images (©DigitalGlobe 2014 provided by EUSI) for t1, t3, and t4 serve for comparison with the multitemporal classification results.
Figure 12.
Multitemporal classification for the time series stack of the year 2014–2015 resulting in seven change classes: open water (W); water to land/soil (W–L); flooded vegetation to land/soil (V–L); flooded vegetation to irrigated fields (V–F); and irrigated fields to land/soil or land/soil to irrigated fields (F–L/L–F); land with permanent vegetation (L1); and land with soil, rock, urban (L2). Two sites representing all classes are displayed in zoom windows: The northern site (a) features open water, the change from water to land, and large areas of cultivation in the east. The centrally located site (b) shows permanent open water, large areas that changed from flooded vegetation to land or to fields, and a permanently vegetated area in the north-east. Optical reference images (©DigitalGlobe 2014 provided by EUSI) for t1, t3, and t4 serve for comparison with the multitemporal classification results.
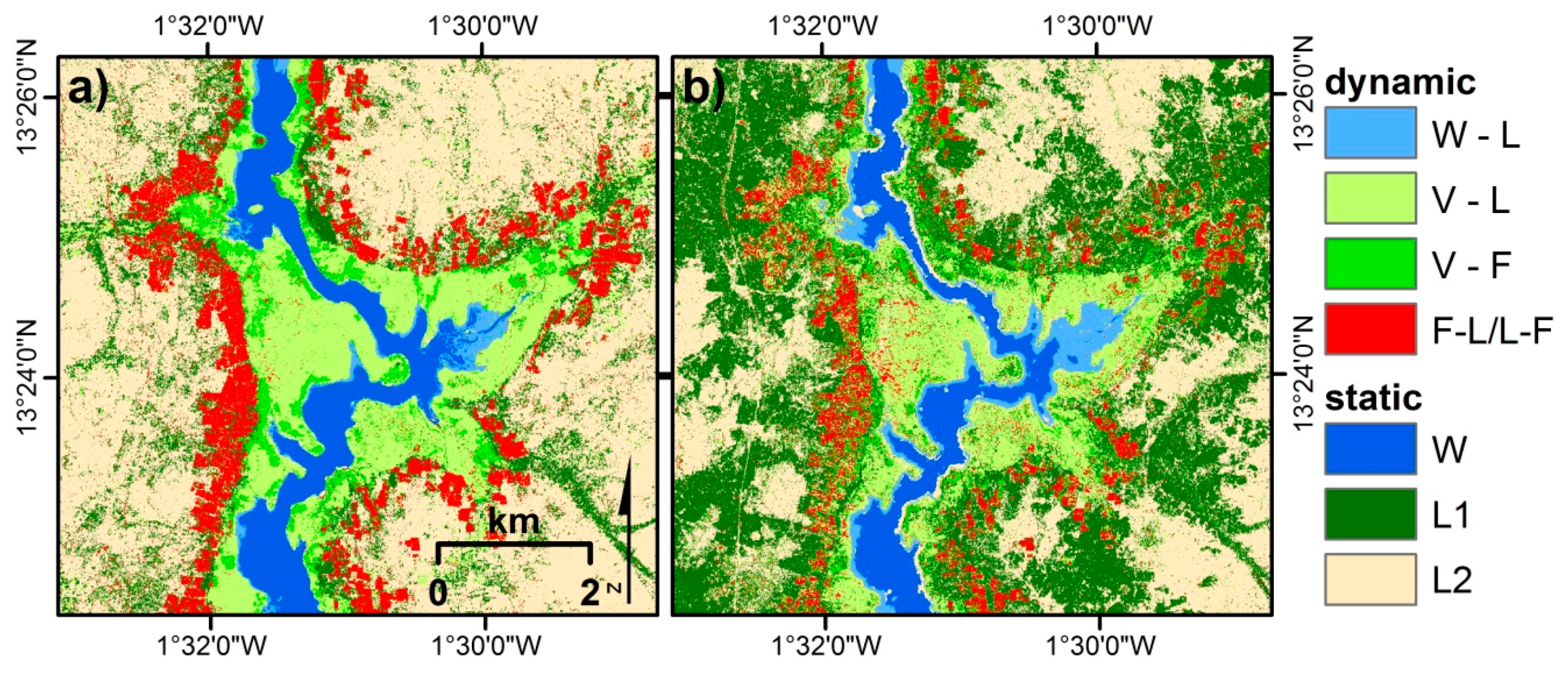
Figure 13.
Multitemporal classification results using as input (a) dual-polarimetric SAR intensity and phase data vs. (b) single-polarimetric SAR intensity (K0) only to classify the following change classes: open water—stable (dark blue); water to land (light blue); flooded vegetation to land (light green); flooded vegetation to field (green); irrigated fields (red); land with permanent vegetation—stable (dark green); and land with soil, rock, urban (beige).
Figure 13.
Multitemporal classification results using as input (a) dual-polarimetric SAR intensity and phase data vs. (b) single-polarimetric SAR intensity (K0) only to classify the following change classes: open water—stable (dark blue); water to land (light blue); flooded vegetation to land (light green); flooded vegetation to field (green); irrigated fields (red); land with permanent vegetation—stable (dark green); and land with soil, rock, urban (beige).
Table 1.
Sensor characteristics of the used datasets TerraSAR-X, RapidEye, WorldView-2, and GeoEye-1.
Table 1.
Sensor characteristics of the used datasets TerraSAR-X, RapidEye, WorldView-2, and GeoEye-1.
| | TerraSAR-X | | RapidEye | WorldView-2 | GeoEye-1 |
|---|
| Wavelength | 3.1 cm | Spectral Bands | 440–510 nm (blue) 520–590 nm (green) 630–685 nm (red) 690–730 nm (redEdge) 760–850 (NIR) | 442–515 nm (blue) 506–586 nm (green) 624–694 nm (red) 765–901 (NIR) | 450–510 nm (blue) 510–580 nm (green) 655–690 nm (red) 780–920 (NIR) |
| Mode | StripMap |
| Polarization | HH-VV dual-pol |
| Frequency | X-band (9.6 GHz) | Dynamic range | 12 bits/pixel | 11 bits/pixel | 11 bits/pixel |
| Resolution | 6.60 m (azimuth), 2.49 m (range) | Resolution | 6.5 m (ms) | 2 m (ms), 0.5 m (pan) | 2 m (ms), 0.5 m (pan) |
| Pixel spacing | 5 m (resampled) | Pixel spacing | 5 m (resampled) | 0.5 m (pansharpened) | 0.5 m (pansharpened) |
| Inc. angle | 27.4°–28.9° | Off-nadir angle | 2.5°–21.2° (different acquisitions) | 22.0° | 39.2° |
| Swath width | 15 km | Swath width | 77 km | 16.4 km | 15.2 km |
| Pass direction | Ascending, right-looking | Pass direction | Descending | Descending | Descending |
| Product level | Level 1B (single Look Slant Range Complex (SSC)) | Product level | Level 1B (basic) | Level 1B (ortho-ready standard) | Level 1B (ortho-ready standard) |
Table 2.
Remote sensing data used in this study. Main dataset: TerraSAR-X dual-co-polarimetric HH-VV StripMap time series. Reference datasets: RapidEye (RE), WorldView-2 (WV-2), GeoEye-1 (GE-1), and GPS/photo data. Data marked in bold were used as reference datasets for the areas of interest (AOIs).
Table 2.
Remote sensing data used in this study. Main dataset: TerraSAR-X dual-co-polarimetric HH-VV StripMap time series. Reference datasets: RapidEye (RE), WorldView-2 (WV-2), GeoEye-1 (GE-1), and GPS/photo data. Data marked in bold were used as reference datasets for the areas of interest (AOIs).
| | 2013–2014 | 2014–2015 |
|---|
| No | TerraSAR-X Data | Optical Reference Data | GPS/Photo Data | TerraSAR-X Data | Optical Reference Data | GPS/Photo Data |
|---|
| 1 | 6 September 2013 | | | 4 September 2014 | | |
| 2 | * 17 September 2013 | | | 15 September 2014 | | |
| 3 | 28 September 2013 | | | * 26 September 2014 | 24 September (WV-2) | |
| 4 | 9 October 2013 | | | 7 October 2014 | | |
| 5 | 20 October 2013 | 19 October (RE) | 15/18 October | 18 October 2014 | | |
| 6 | 31 October 2013 | | | 29 October 2014 | | |
| 7 | 11 November 2013 | | | 9 November 2014 | 8 November (RE) | |
| 8 | 22 November 2013 | | | 20 November 2014 | | |
| 9 | 3 December 2013 | | | 1 December 2014 | | |
| 10 | 14 December 2013 | | | 12 December 2014 | | |
| 11 | 25 December 2013 | | | 23 December 2014 | | |
| 12 | 5 January 2014 | | | * 3 January 2015 | 5 January (RE) | |
| 13 | 16 January 2014 | | | 14 January 2015 | | |
| 14 | 27 January 2014 | | | 25 January 2015 | | |
| 15 | 7 February 2014 | 7 February (RE) | | 5 February 2015 | 2 February (RE) | |
| 16 | 18 February 2014 | | | 16 February 2015 | | |
| 17 | 1 March 2014 | | | 27 February 2015 | | |
| 18 | 12 March 2014 | | | 10 March 2015 | | |
| 19 | 23 March 2014 | | | 21 March 2015 | | |
| 20 | 3 April 2014 | 7 April (RE) | | 1 April 2015 | 30 March (RE) | |
| 21 | 14 April 2014 | | | 12 April 2015 | 15 April (GE-1) | |
| | | | | | | 25/28 October |
Table 3.
Change processes at Lac Bam from the rainy to the dry season, illustrated for the four time steps: 24 September 2014 (t1), 8 November 2014 (t2), 2 February 2015 (t3), and 15 April 2015 (t4): W (water), V (flooded/floating vegetation), F (irrigated fields), L (dry land), main change processes are marked bold.
Table 3.
Change processes at Lac Bam from the rainy to the dry season, illustrated for the four time steps: 24 September 2014 (t1), 8 November 2014 (t2), 2 February 2015 (t3), and 15 April 2015 (t4): W (water), V (flooded/floating vegetation), F (irrigated fields), L (dry land), main change processes are marked bold.
| Change Class | Stable/Dynamic | t1 (24 September 2014) | t2 (8 November 2014) | t3 (2 February 2015) | t4 (15 April 2015) |
|---|
| W | stable | W | W | W | W |
| W–L | dynamic | W | W | W | L |
| | | W | W | L | L |
| V–L | dynamic | V | V | V | L |
| | | V | V | L | L |
| V–F | dynamic | V | V | L | F |
| F–L/L–F | dynamic | F | L | F | L |
| | | L | F | F | L |
| | | L | L | F | L |
| | | L | L | L | F |
| L1 | stable | L | L | L | L |
| L2 | stable | L | L | L | L |
Table 4.
Areas of interest (AOIs) for the training dataset (averaged for t1–t4) and validation dataset (for each image t1–t4) of the monotemporal classification applied on each image in the time series: W (water); V (flooded/floating vegetation); F (irrigated fields); L (land).
Table 4.
Areas of interest (AOIs) for the training dataset (averaged for t1–t4) and validation dataset (for each image t1–t4) of the monotemporal classification applied on each image in the time series: W (water); V (flooded/floating vegetation); F (irrigated fields); L (land).
| | W | V | F | L | Sum AOIs per Time Step |
|---|
| Training t1 | 25 (av. t1–t4) | 25 (av. t1–t2) | | 25 (av. t1–t4) | 100 (t1–t4) |
| Training t2 | 25 (av. t1–t4) | 25 (av. t1–t2) | | 25 (av. t1–t4) |
| Training t3 | 25 (av. t1–t4) | | 25 (t3 only) | 25 (av. t1–t4) |
| Training t4 | 25 (av. t1–t4) | | | 25 (av. t1–t4) |
| Validate t1 | 20 (t1–t4) | 20 (t1–t2) | | 20 (t1–t4) | 60 (t1) |
| Validate t2 | 20 (t1–t4) | 20 (t1–t2) | | 20 (t1–t4) | 60 (t2) |
| Validate t3 | 20 (t1–t4) | | 20 (t3 only) | 20 (t1–t4) | 60 (t3) |
| Validate t4 | 20 (t1–t4) | | 20 (t4 only) | 20 (t1–4) | 60 (t4) |
| Sum AOIs per class | 45 (t1–t4) | 45 (t1–t2) | 65 (val. t3 differs t4) | 45 (t1–t4) | |
Table 5.
Multitemporal AOIs for the training and validation dataset: W (water); W–L (water to land/soil); V–L (flooded vegetation to land/soil); V–F (flooded vegetation to irrigated fields); F–L/L–F (irrigated fields to land/soil or land/soil to irrigated fields); L1 (land: permanent vegetation); L2 (land: soil, rock, urban).
Table 5.
Multitemporal AOIs for the training and validation dataset: W (water); W–L (water to land/soil); V–L (flooded vegetation to land/soil); V–F (flooded vegetation to irrigated fields); F–L/L–F (irrigated fields to land/soil or land/soil to irrigated fields); L1 (land: permanent vegetation); L2 (land: soil, rock, urban).
| | W Stable | W–L Dynamic | V–L Dynamic | V–F Dynamic | F–L/L–F Dynamic | L1 Stable | L2 Stable | Sum AOIs Multitemp |
|---|
| Training Multitemp | 25 | 25 | 25 | 25 | 25 | 8 | 17 | 150 |
| Validate Multitemp | 20 | 20 | 20 | 20 | 20 | 7 | 13 | 120 |
| Sum AOIs per Class | 45 | 45 | 45 | 45 | 45 | 15 | 30 | |
Table 6.
Accuracy assessment of the monotemporal classification t1 (24 September 2014), t2 (8 November 2014), t3 (2 February 2015), t4 (15 April 2015), with Producer’s Accuracy (PA) and User’s Accuracy (UA) for each class, Overall Accuracy (OA) for each image, non-existing classes are marked as N/A.
Table 6.
Accuracy assessment of the monotemporal classification t1 (24 September 2014), t2 (8 November 2014), t3 (2 February 2015), t4 (15 April 2015), with Producer’s Accuracy (PA) and User’s Accuracy (UA) for each class, Overall Accuracy (OA) for each image, non-existing classes are marked as N/A.
| | T1 (24 September 2014) | T2 (8 November 2014) | T3 (2 February 2015) | T4 (15 April 2015) |
|---|
| | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) |
|---|
| Open Water | 99.9 | 99.1 | 100.0 | 99.3 | 99.9 | 99.2 | 95.1 | 90.0 |
| Flooded Veg. | 94.9 | 83.6 | 91.2 | 84.2 | N/A | N/A | N/A | N/A |
| Irrigated fields | N/A | N/A | N/A | N/A | 82.1 | 68.6 | 69.2 | 66.1 |
| Land | 56.2 | 93.4 | 61.7 | 91.6 | 60.4 | 85.4 | 63.2 | 74.1 |
| OA (%) | 85.5 | 86.3 | 83.8 | 79.7 |
Table 7.
Accuracy assessment of the multitemporal classification with the classes open water (W); water to land/soil (W–L); flooded vegetation to land/soil (V–L); flooded vegetation to irrigated fields (V–F); and irrigated fields to land/soil or land/soil to irrigated fields (F–L/L–F); land with permanent vegetation (L1); land soil, rock, urban (L2). The error matrix including Producer’s Accuracy (PA) and User’s Accuracy (UA) are stated for each class.
Table 7.
Accuracy assessment of the multitemporal classification with the classes open water (W); water to land/soil (W–L); flooded vegetation to land/soil (V–L); flooded vegetation to irrigated fields (V–F); and irrigated fields to land/soil or land/soil to irrigated fields (F–L/L–F); land with permanent vegetation (L1); land soil, rock, urban (L2). The error matrix including Producer’s Accuracy (PA) and User’s Accuracy (UA) are stated for each class.
| | | W (st.) | W–L (dyn.) | V–L (dyn.) | V–F (dyn.) | F (dyn.) | L1 (st.) | L2 (st.) | PA (%) | UA (%) |
|---|
| Water | (stable) | 4407 | 535 | 0 | 0 | 0 | 0 | 0 | 100.0 | 89.2 |
| Water to Land | (dynamic) | 0 | 996 | 0 | 0 | 0 | 0 | 0 | 58.8 | 100.0 |
| Flooded Veg. to Land | (dynamic) | 0 | 129 | 2196 | 106 | 7 | 3 | 8 | 90.1 | 89.7 |
| Flooded Veg. to Field | (dynamic) | 0 | 2 | 222 | 1102 | 39 | 20 | 85 | 84.9 | 75.0 |
| Land (Perm. Veg.) | (stable) | 0 | 0 | 8 | 14 | 1092 | 41 | 156 | 86.4 | 83.3 |
| Irrigated Fields | (dynamic) | 0 | 29 | 1 | 60 | 79 | 2010 | 46 | 96.8 | 90.3 |
| Land (Soil, Urban) | (stable) | 0 | 4 | 10 | 16 | 47 | 2 | 1346 | 82.0 | 94.5 |
Table 8.
Accuracy assessment of the multitemporal classification using a stack of all time steps of all four Kennaugh elements (left), compared to using only K0 (right).
Table 8.
Accuracy assessment of the multitemporal classification using a stack of all time steps of all four Kennaugh elements (left), compared to using only K0 (right).
| | K0-K3-K4-K7 | K0 |
|---|
| PA (%) | UA (%) | PA (%) | UA (%) |
|---|
| water (stable) | 100.0 | 88.5 | 98.7 | 100.0 |
| water to land (dyn.) | 56.6 | 100.0 | 98.1 | 98.7 |
| flooded veg. to land (dyn.) | 90.1 | 89.7 | 79.0 | 87.0 |
| flooded veg. to field (dyn.) | 84.9 | 75.0 | 44.7 | 42.1 |
| land/perm. veg. (stable) | 86.4 | 83.3 | 57.6 | 49.5 |
| irrigated fields (dyn.) | 96.8 | 90.3 | 79.0 | 83.7 |
| land/soil/urban (stable) | 82.0 | 94.5 | 78.9 | 73.7 |
| OA (%) | 88.5 | 82.2 |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}