
A Conceptually Simple Modeling Approach for Jason-1 Sea State Bias Correction Based on 3 Parameters Exclusively Derived from Altimetric Information


Abstract
:
1. Introduction
2. Data and Methods
2.1. Direct Estimation of Sea State Impacts
2.2. Mean Zero Up-Crossing Period (Tm, Tz)
2.3. Smoothing Splines with GAMs
3. Results
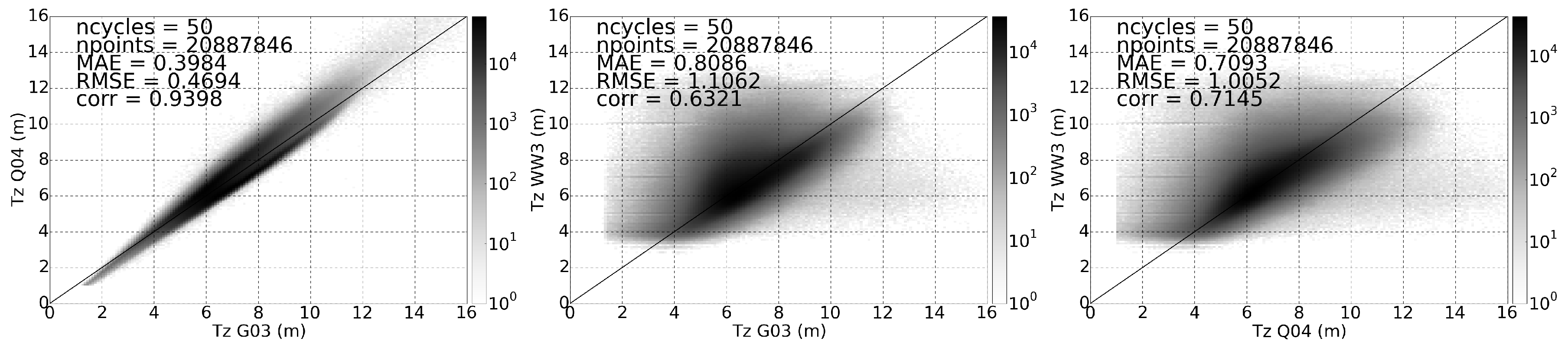
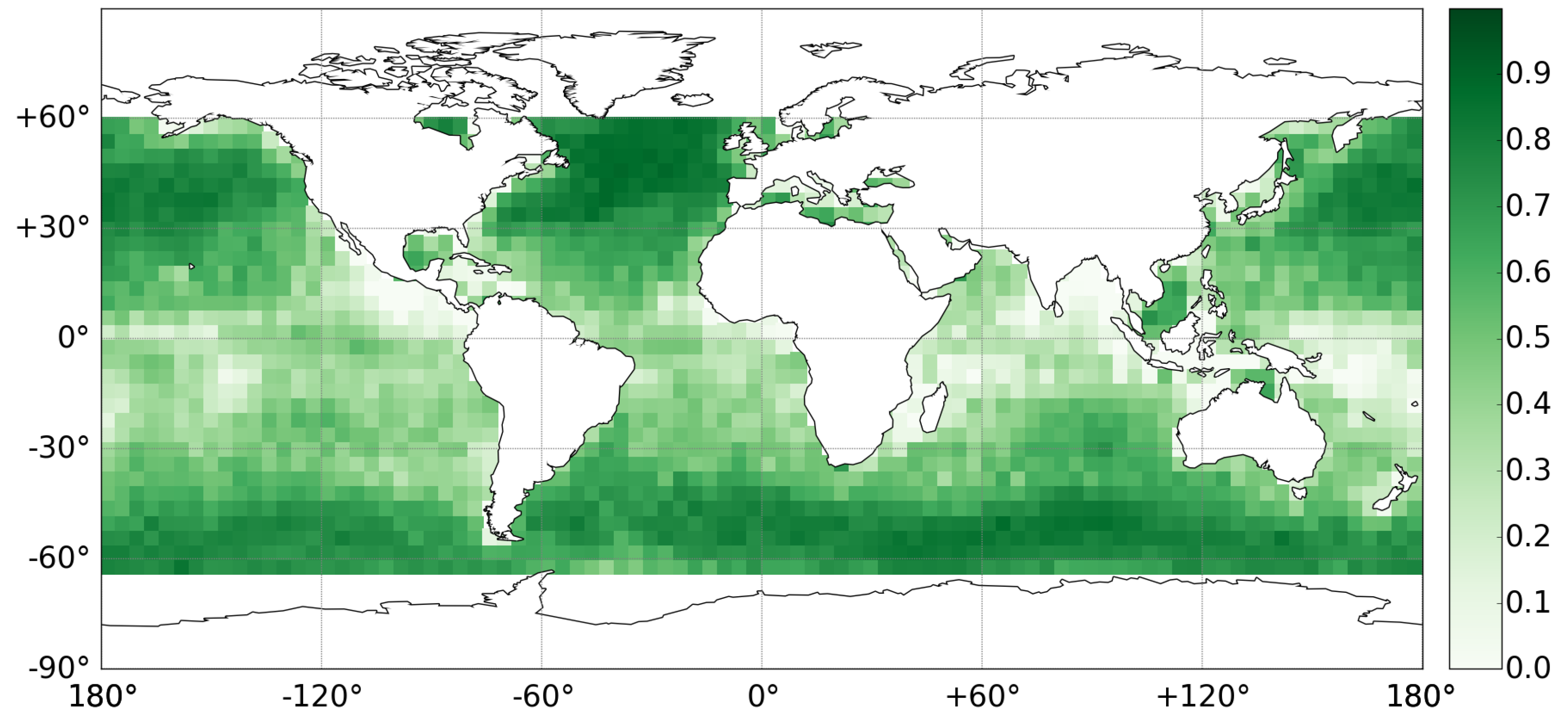
3.1. Mean Wave Period Assessment
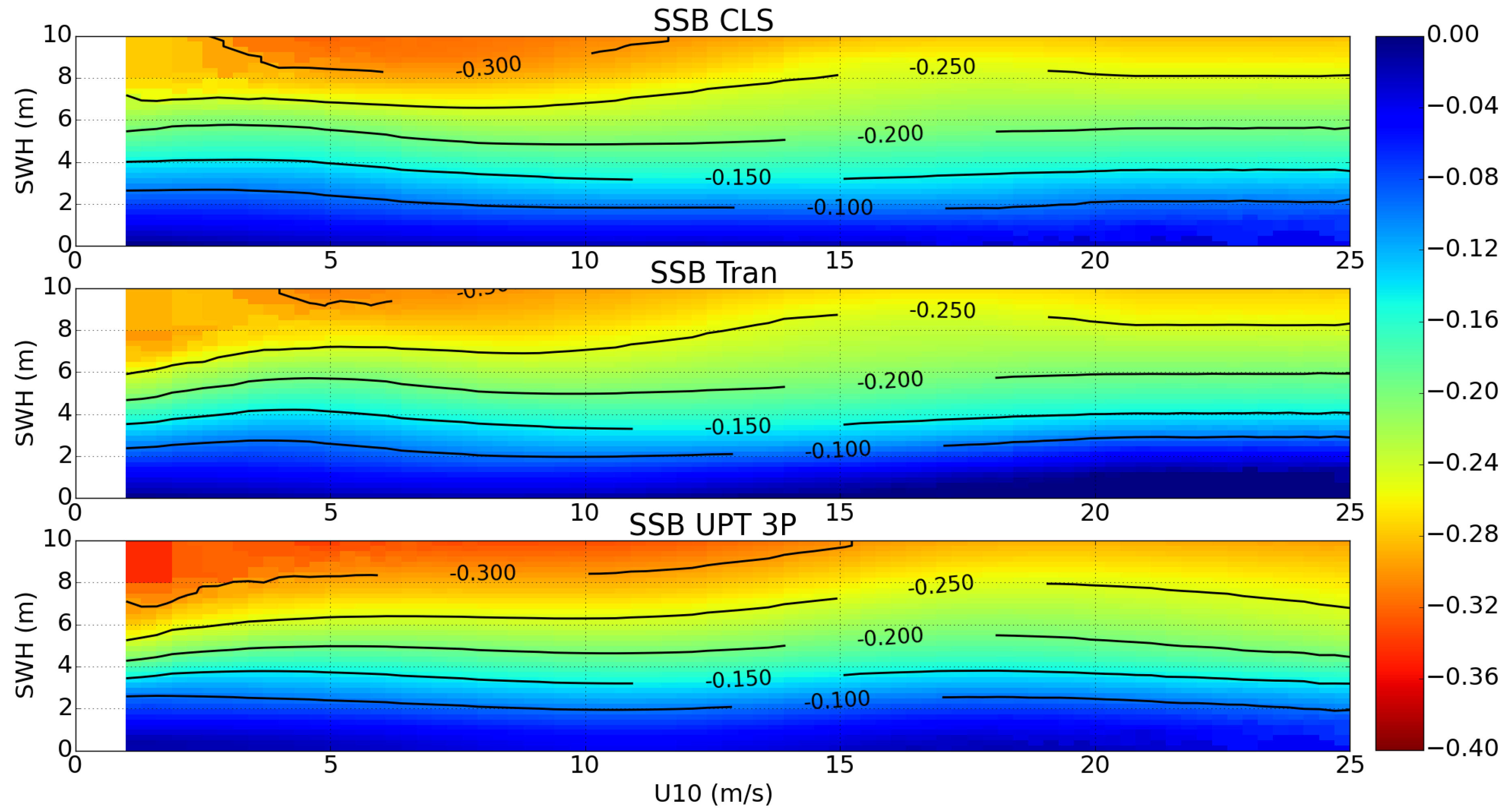
3.2. SSB Modeling Procedures and Design
3.3. Model Testing with New SSB Predictions
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Melville, W.K.; Stewart, R.H.; Keller, W.C.; Kong, J.A.; Arnold, D.V.; Jessup, A.T.; Loewen, M.R.; Slinn, A.M. Measurements of electromagnetic bias in radar altimetry. J. Geophys. Res. 1991, 96, 4915–4924. [Google Scholar] [CrossRef]
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.L.; Callahan, P.S. Satellite altimetry, in Satellite Altimetry and Earth Sciences edited by L. Fu and A. Cazenave. Int. Geophys. Ser. 2001, 69, 1–31. [Google Scholar]
- Ghavidel, A.; Schiavulli, D.; Camps, A. Numerical Computation of the Electromagnetic Bias in GNSS-R Altimetry. IEEE T. Geosci. Remote 2006, 54, 489–498. [Google Scholar] [CrossRef]
- Born, G.H.; Richards, M.A.; Rosborough, G.W. An empirical determination of the effects of sea state bias on SEASAT altimetry. J. Geophys. Res. 1982, 87, 3221–3226. [Google Scholar] [CrossRef]
- Gaspar, P.; Le Traon, P.; Zanife, O. Estimating the sea state bias of the TOPEX and POSEIDON altimeteres from crossover differences. J. Geophys. Res. 1994, 99, 24981–24994. [Google Scholar] [CrossRef]
- Gaspar, P.; Florens, J. Estimation of the sea state bias in radar altimeter measurements of sea level: Results from a new nonparametric method. J. Geophys. Res. 1998, 103, 803–814. [Google Scholar] [CrossRef]
- Gaspar, P.; Labroue, S.; Ogor, F. Improving Nonparametric Estimates of the Sea State Bias in Radar Altimeter Measurements of Sea Level. J. Atmos. Ocean. Technol. 2002, 19, 1690–1707. [Google Scholar] [CrossRef]
- Feng, H.; Yao, S.; Li, L.; Tran, N.; Vandemark, D.; Labroue, S. Spline-Based Nonparametric Estimation of the Altimeter Sea-State Bias Correction. IEEE Geosci. Remote Sens. Lett. 2010, 7, 577–581. [Google Scholar] [CrossRef]
- Vandemark, D.; Tran, N.; Beckley, B.; Chapron, B.; Gaspar, P. Direct estimation of sea state impacts on radar altimeter sea level measurements. Geophys. Res. Lett. 2002, 29, 2148. [Google Scholar] [CrossRef]
- Tran, N.; Vandemark, D.; Chapron, B.; Labroue, S.; Feng, H.; Beckley, B.; Vincent, P. New models for satellite altimeter sea state bias correction developed using global wave model data. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Tran, N.; Vandemark, D.; Labroue, S.; Feng, H.; Chapron, B.; Tolman, H.L.; Lambin, J.; Picot, N. Sea state bias in altimeter sea level estimates determined by combining wave model and satellite data. J. Geophys. Res. 2010, 115, 1–7. [Google Scholar] [CrossRef]
- Davies, C.G.; Challenor, P.G.; Cotton, P.D. Measurement of wave period from radar altimeters. Ocean wave measurement and analysis. Am. Soc. Civ. Eng. 1997, 819–826. [Google Scholar]
- Hwang, P.; Teague, W.; Jacobs, G.; Wang, D. A statistical comparison of wind speed, wave height, and wave period derived from satellite altimeters and ocean buoys in the Gulf of Mexico region. J. Geophys. Res. 1998, 103, 10451. [Google Scholar] [CrossRef]
- Gommenginger, C.P.; Srokosz, M.; Challenor, P.; Cotton, D. Measuring ocean wave period with satellite altimeters: A simple empirical model. Geophys. Res. Lett. 2003, 30, 2150. [Google Scholar] [CrossRef]
- Quilfen, Y.; Chapron, B.; Collard, F.; Serre, M. Calibration/Validation of an Altimeter Wave Period Model and Application to TOPEX/Poseidon and Jason-1 Altimeters. Mar. Geod. 2004, 27, 535–549. [Google Scholar] [CrossRef]
- Mackay, E.; Retzler, C.H.; Challenor, P.; Gommenginger, C.P. A parametric model for ocean wave period from Ku band altimeter data. J. Geophys. Res. 2008, 113, 1–16. [Google Scholar] [CrossRef]
- Govindan, R.; Kumar, R.; Basu, S.; Sarkar, A. Altimeter-derived ocean wave period using genetic algorithm. IEEE Geosci. Remote Sens. Lett. 2011, 8, 354–358. [Google Scholar]
- Scharroo, R. RADS Version 3.1 User Manual and Format Specification; 2012. [Google Scholar]
- Scharroo, R. RADS Version 4.2.4 User Manual; 2016. [Google Scholar]
- Chelton, D. The sea state bias in altimeter estimates of sea level from collinear analysis of TOPEX data. J. Geophys. Res. 1994, 99, 24995–25008. [Google Scholar] [CrossRef]
- Scharroo, R.; Lillibridge, J. Non-Parametric Sea-state Bias Models and Their Relevance to Sea Level Change Studies. In Proceedings of the ENVISAT/ERS Symposium, Salzburg, Austria, 6–10 September 2004.
- Caires, S.; Sterl, A.; Gommenginger, C.P. Global ocean mean wave period data: Validation and description. J. Geophys. Res. 2005, 110, 1–12. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning with Applications in R; Springer Texts in Statistics; Springer: New York, NY, USA, 2014. [Google Scholar]
- Wood, S. Generalized Additive Models: An introduction with R; Chapman & Hall/CRC Texts in Statistical Science; CRC Press: Florida, FL, USA, 2006; Volume 62. [Google Scholar]
- Andersen, O.; Knudsen, P.; Stenseng, L. The DTU13 MSS (Mean Sea Surface) and MDT (Mean Dynamic Topography) from 20 Years of Satellite Altimetry; Springer: Berlin, Germany, 2015. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name (Units) | Code | Min | Max |
|---|---|---|---|
| sea level anomaly (m) | 0 | −5 | 5 |
| latitude (degrees) | 201 | −60 | 60 |
| Ku-band significant wave height (m) | 1701 | 0 | 10 |
| altimeter wind speed (m/s) | 1901 | 0 | 30 |
| Ku-band backscatter coefficient (dB) | 1801 | 0 | 16 |
| std dev of Ku-band range (m) | 2002 | 0 | 0.4 |
| number of valid Ku-band measurements | 2101 | 16 | 21 |
| surface type | 2504 | 0 = open ocean | |
| corruption of altimeter measurement | flag7 | 0 = ok | |
| Name (Statistic) (Units) | n | Mean | Std | Median | Min | Max |
|---|---|---|---|---|---|---|
| SWH (median) (m) | 2332 | 4.88 | 2.39 | 4.87 | 0.40 | 9.88 |
| U10 (median) (m/s) | 2332 | 11.96 | 5.73 | 11.88 | 1.22 | 22.62 |
| SSHA (mean) (m) | 2332 | −0.17 | 0.08 | −0.18 | −0.32 | 0.00 |
| SSHA (median) (m) | 2332 | −0.17 | 0.07 | −0.18 | −0.32 | −0.01 |
| SSHA (std) (m) | 2332 | 0.12 | 0.01 | 0.12 | 0.09 | 0.21 |
| SSHA (mad) (m) | 2332 | 0.09 | 0.01 | 0.09 | 0.06 | 0.12 |
| SSHA (npoints) | 2332 | n.a. | n.a. | n.a. | 300 | 673359 |
| Tz G03 (median) (s) | 2332 | 8.25 | 1.95 | 8.59 | 2.77 | 11.73 |
| Model | AIC | GCV | R2 | ANOVA Pr (>Chi) |
|---|---|---|---|---|
| 1. SSB2P | −13470 | 18.1 × 10−5 | 0.9668 | - |
| 2. SSB3P | −17067 | 38.8 × 10−6 | 0.9929 | 2.2 × 10−16 |
| Model | Mean | Std | Min | Max | varSLA ↓ |
|---|---|---|---|---|---|
| SSB 1P | −9.96 | 5.04 | −38.0 | 0.0 | 24.397 |
| SSB CLS | −11.15 | 4.74 | −32.1 | −0.4 | 25.101 |
| SSB Tran | −10.69 | 4.67 | −30.9 | 3.7 | 25.117 |
| SSB UPT 3P | −10.87 | 5.10 | −34.8 | -1.2 | 25.265 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pires, N.; Fernandes, M.J.; Gommenginger, C.; Scharroo, R. A Conceptually Simple Modeling Approach for Jason-1 Sea State Bias Correction Based on 3 Parameters Exclusively Derived from Altimetric Information. Remote Sens. 2016, 8, 576. https://doi.org/10.3390/rs8070576
Pires N, Fernandes MJ, Gommenginger C, Scharroo R. A Conceptually Simple Modeling Approach for Jason-1 Sea State Bias Correction Based on 3 Parameters Exclusively Derived from Altimetric Information. Remote Sensing. 2016; 8(7):576. https://doi.org/10.3390/rs8070576
Chicago/Turabian StylePires, Nelson, M. Joana Fernandes, Christine Gommenginger, and Remko Scharroo. 2016. "A Conceptually Simple Modeling Approach for Jason-1 Sea State Bias Correction Based on 3 Parameters Exclusively Derived from Altimetric Information" Remote Sensing 8, no. 7: 576. https://doi.org/10.3390/rs8070576