
An Assessment of Pre- and Post Fire Near Surface Fuel Hazard in an Australian Dry Sclerophyll Forest Using Point Cloud Data Captured Using a Terrestrial Laser Scanner


Abstract
:
1. Introduction
2. Materials and Methods
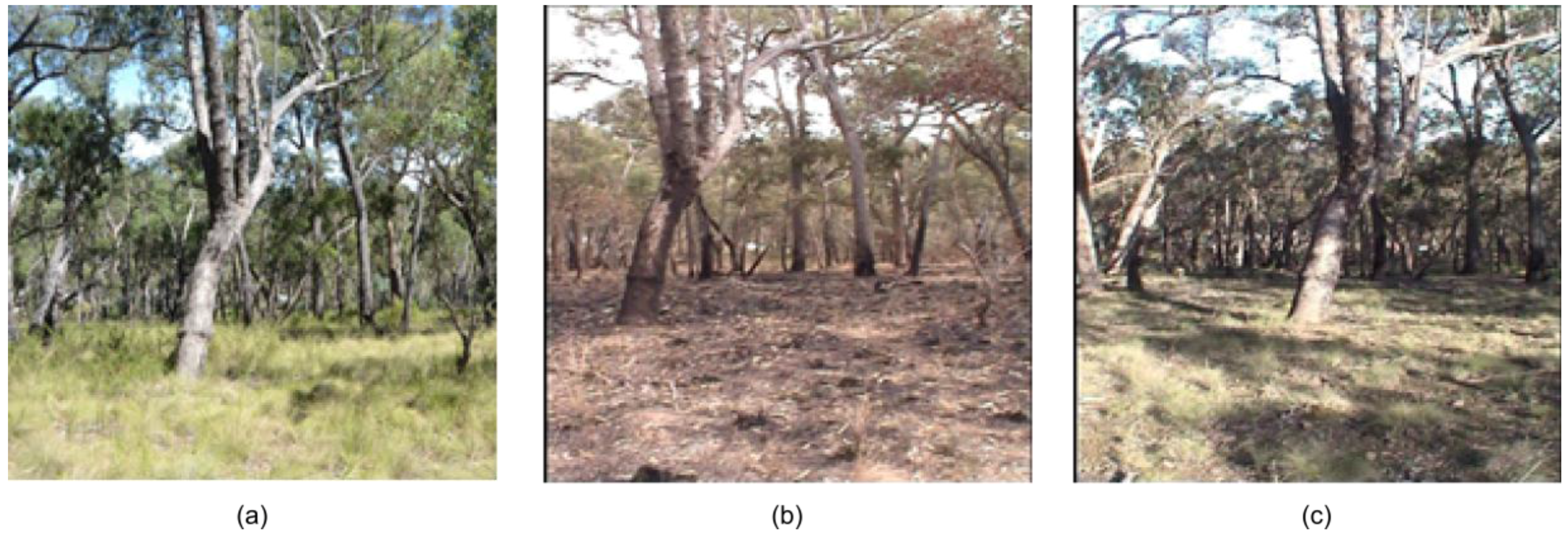
2.1. Study Area
2.2. Field Data
2.3. TLS Data
2.4. TLS Data Processing
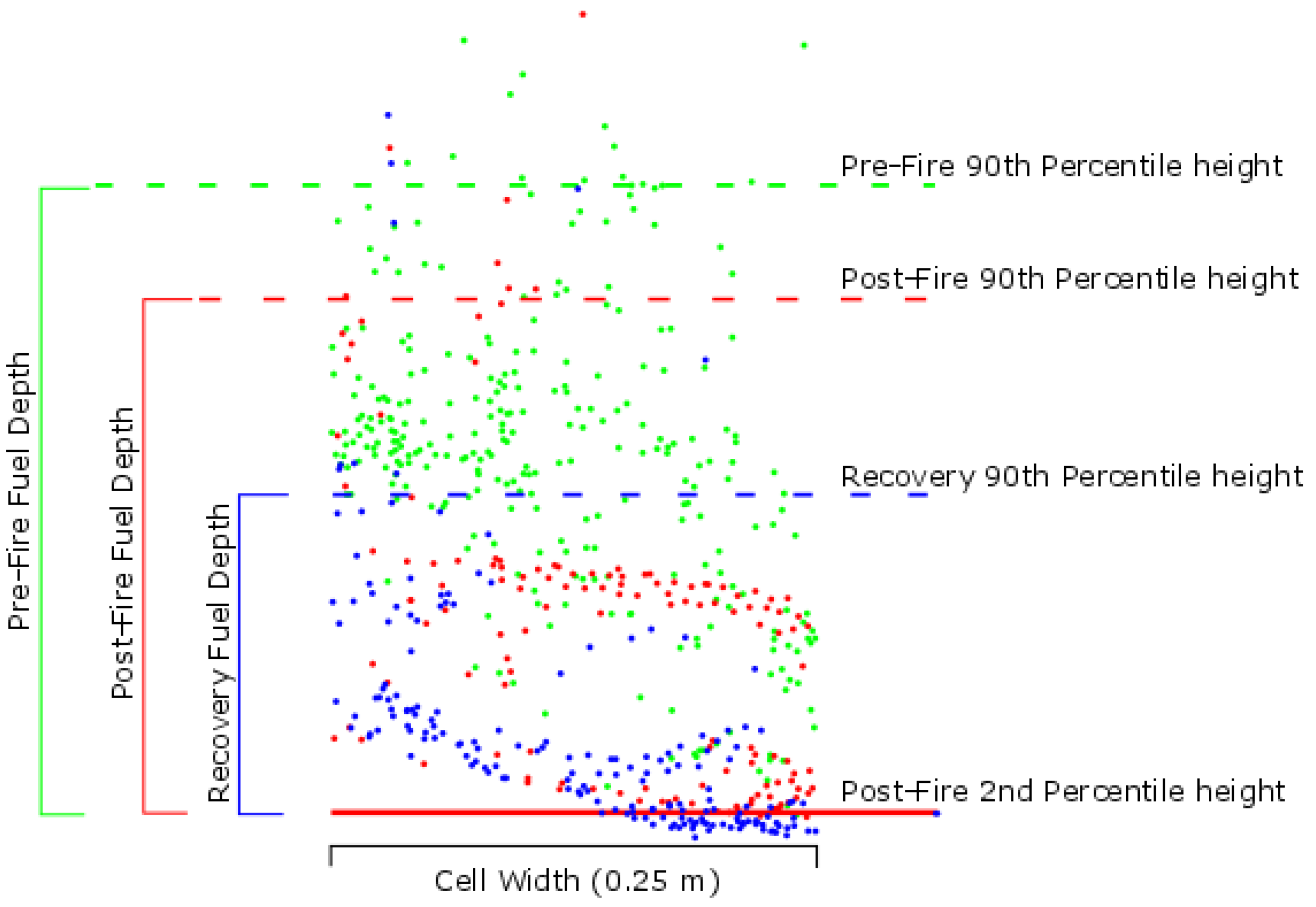
2.5. Fuel Hazard Assessment
3. Results
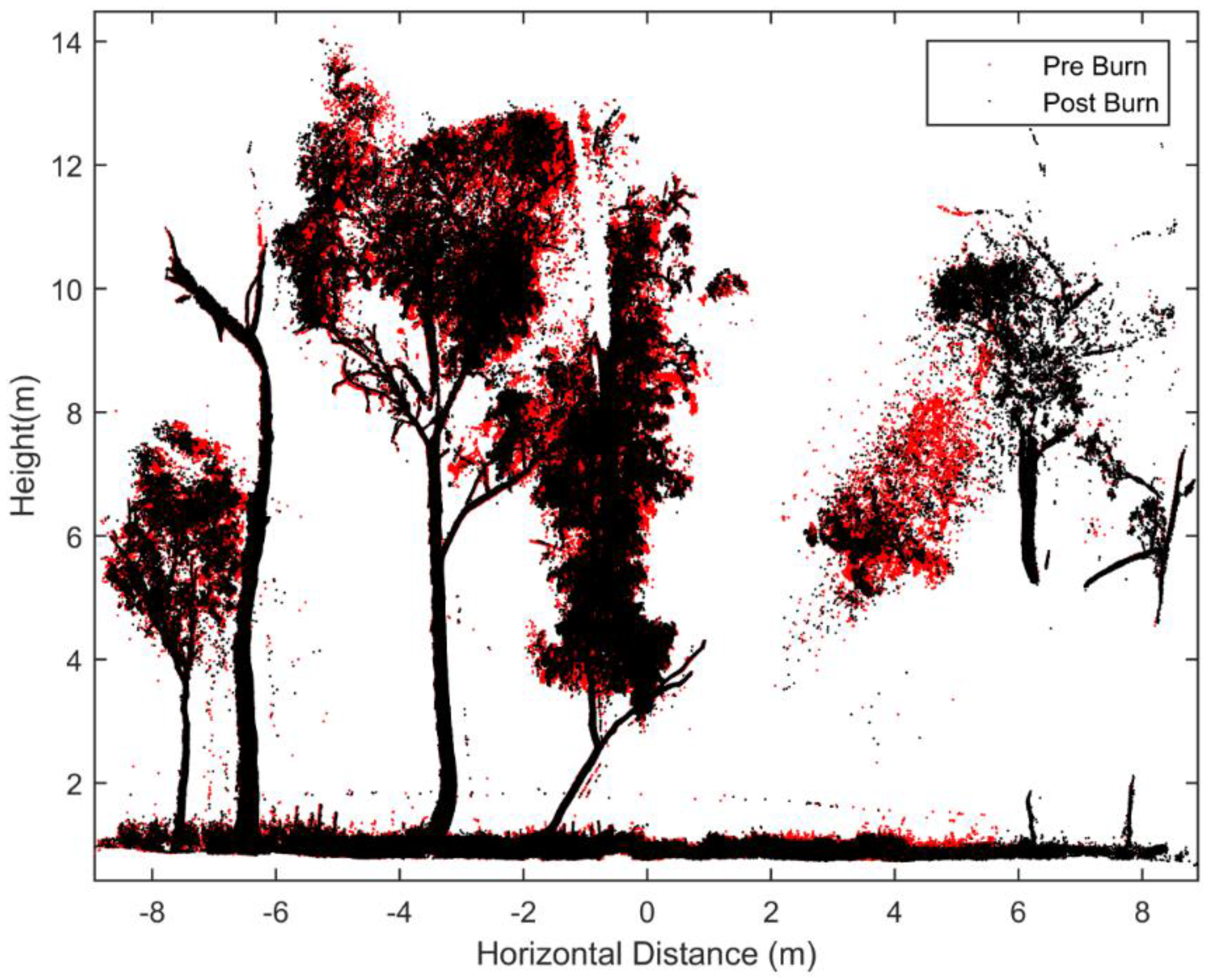
3.1. Point Cloud Properties
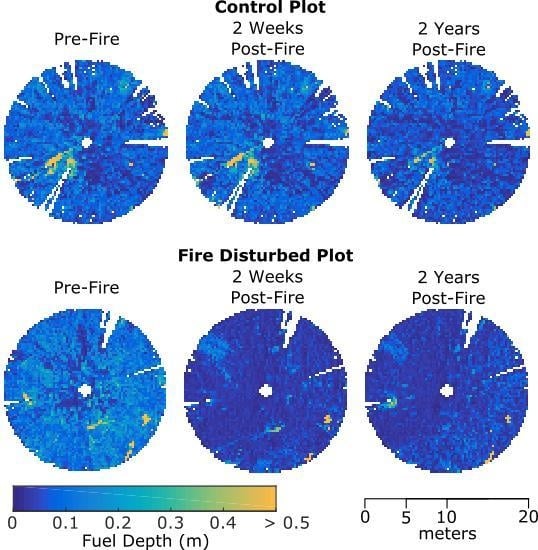
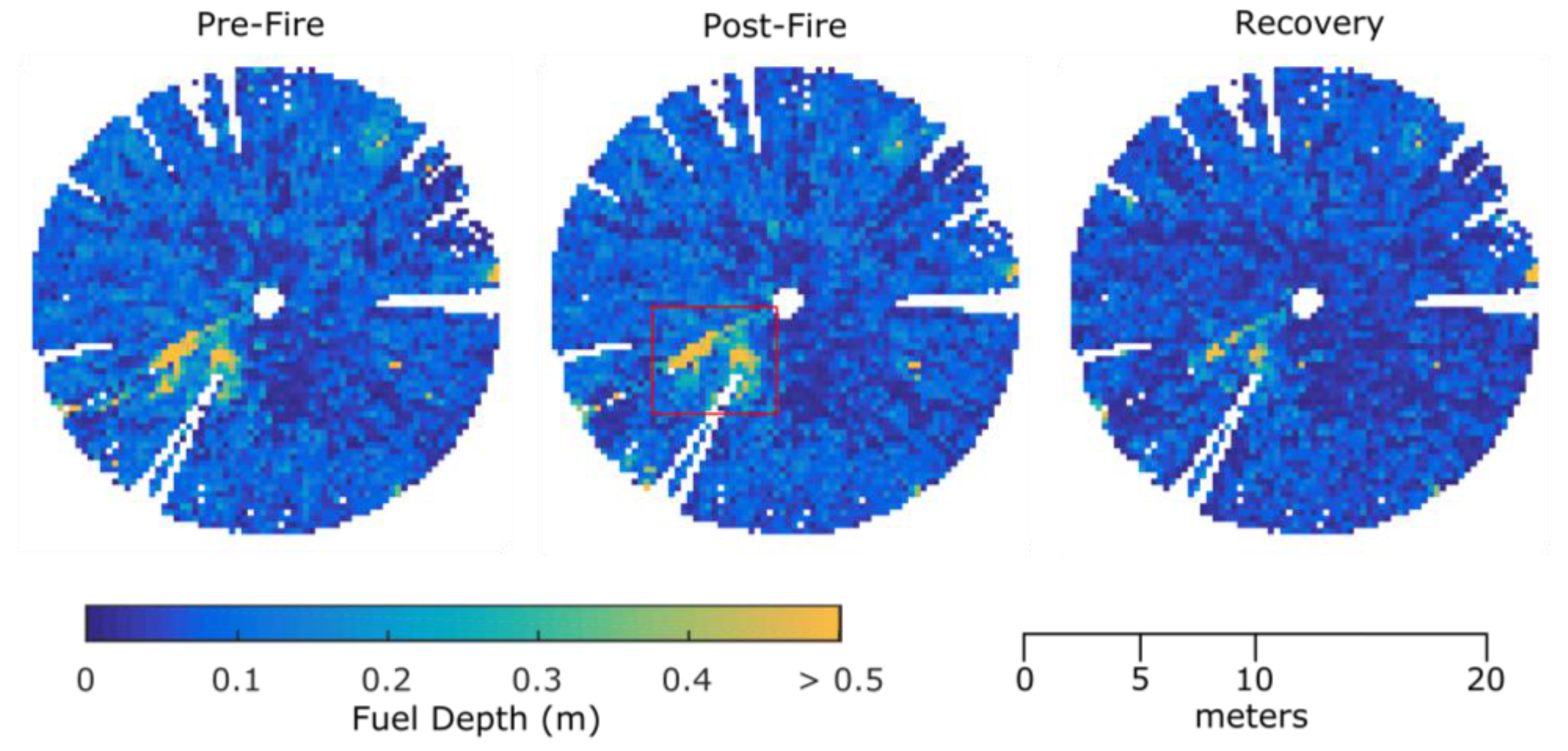
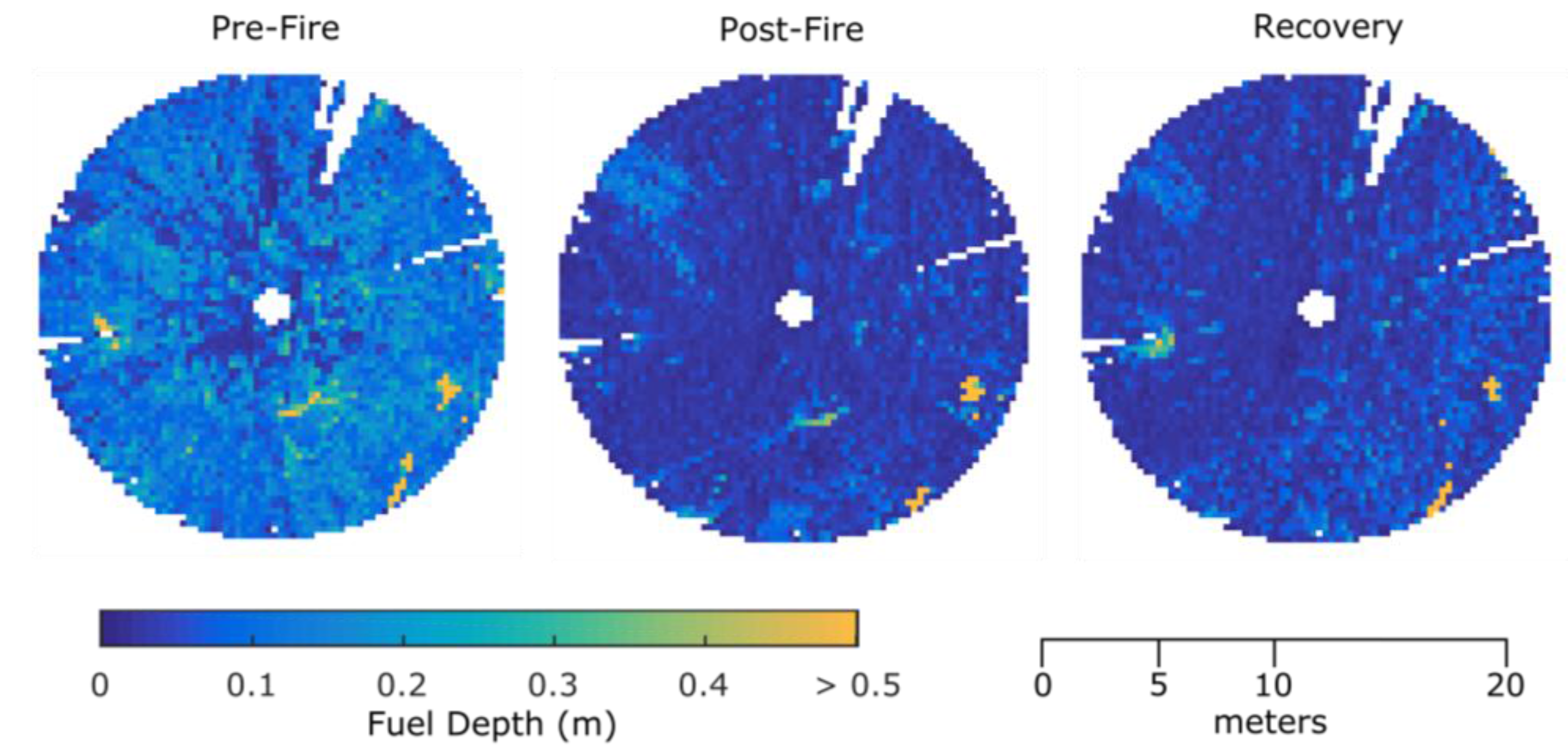
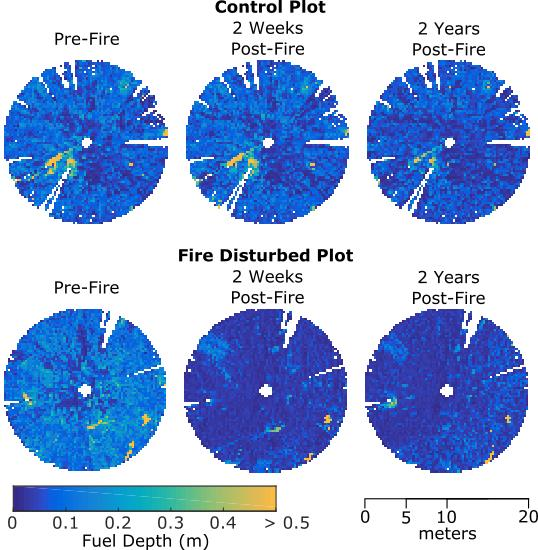
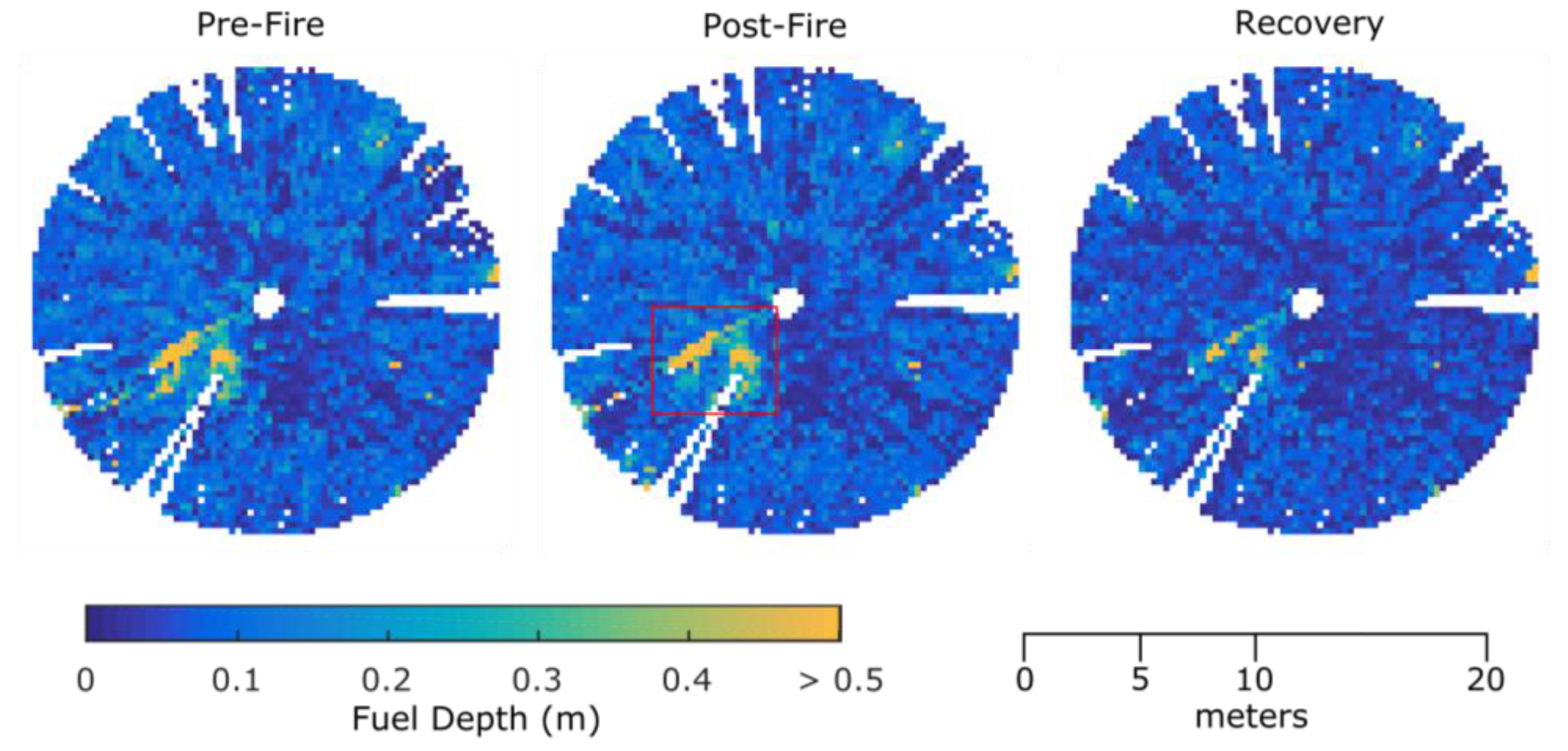
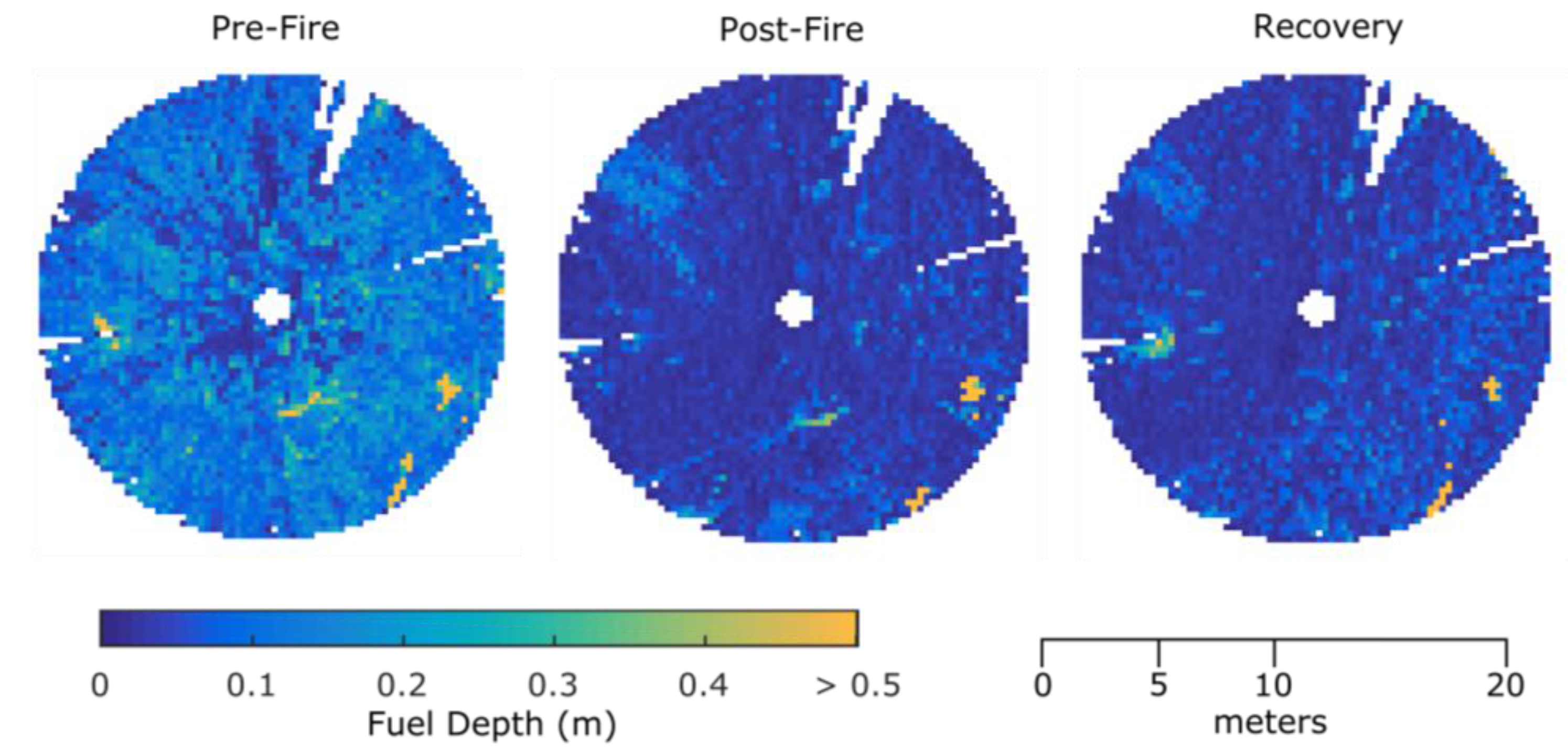
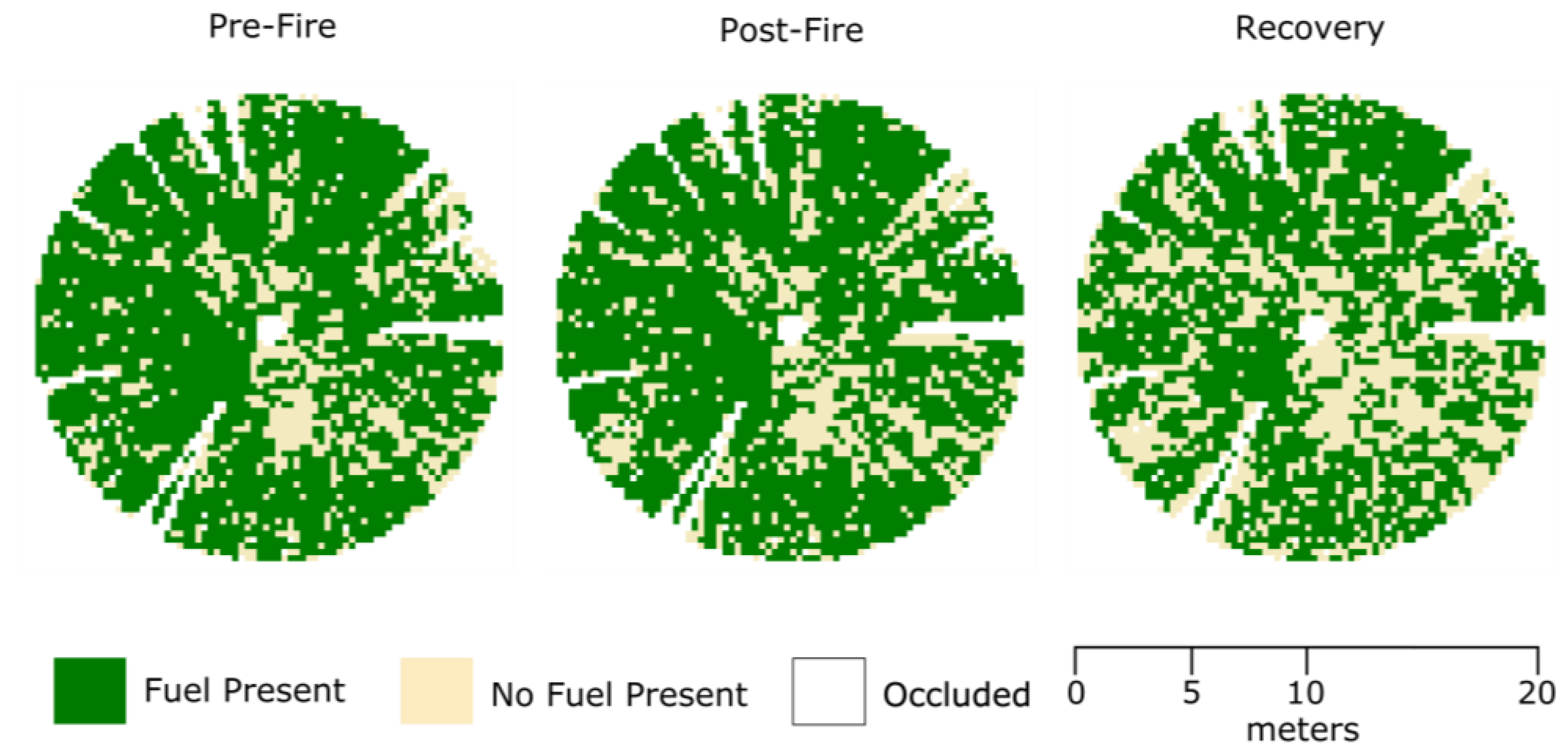
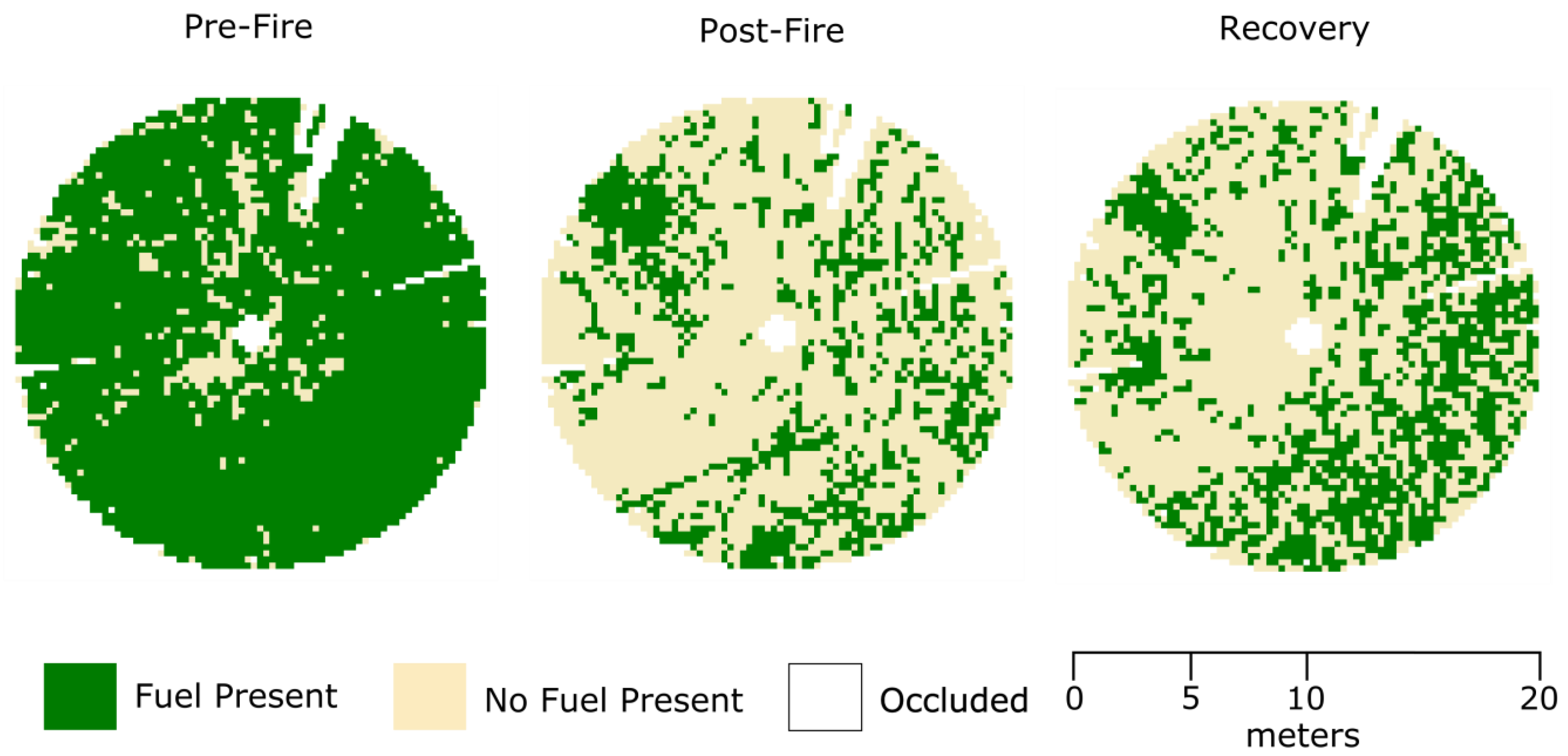
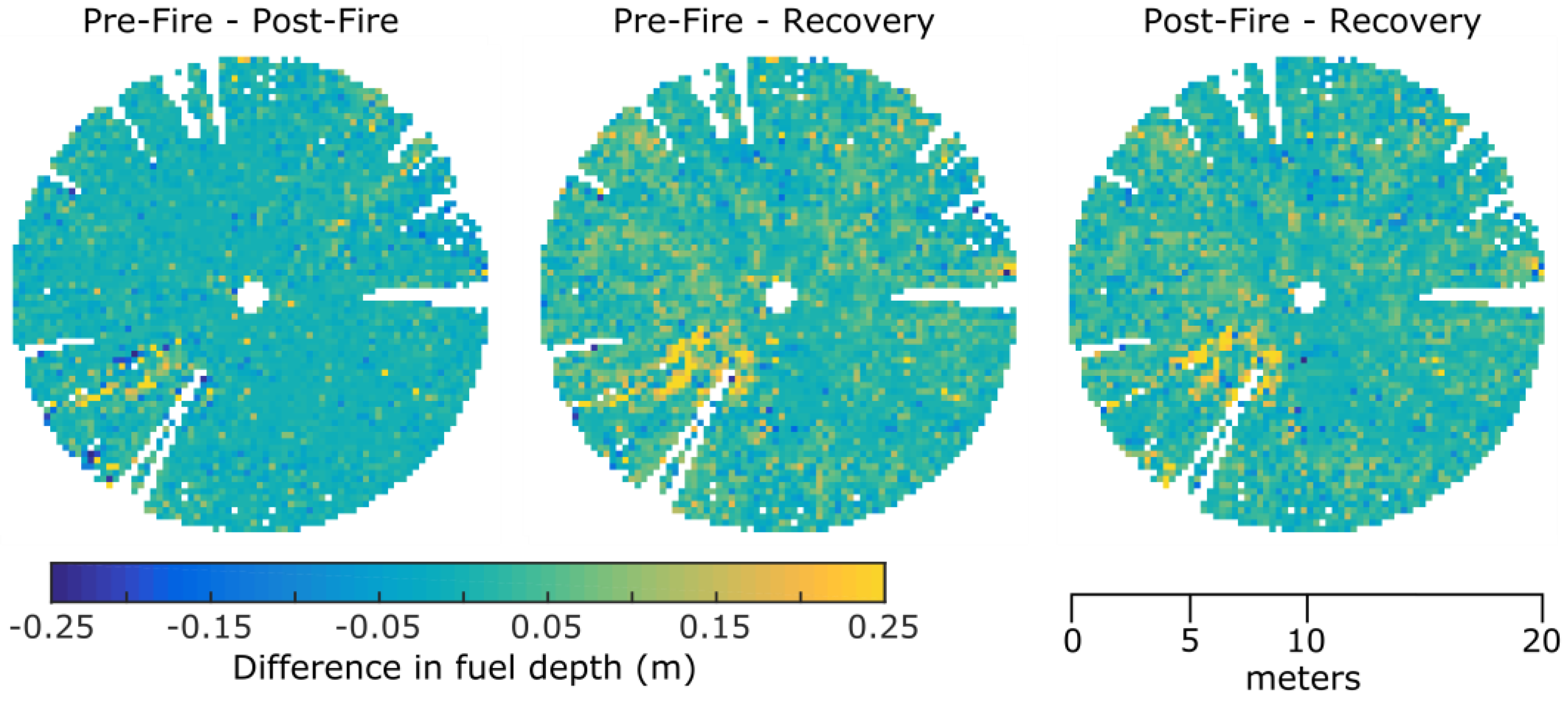
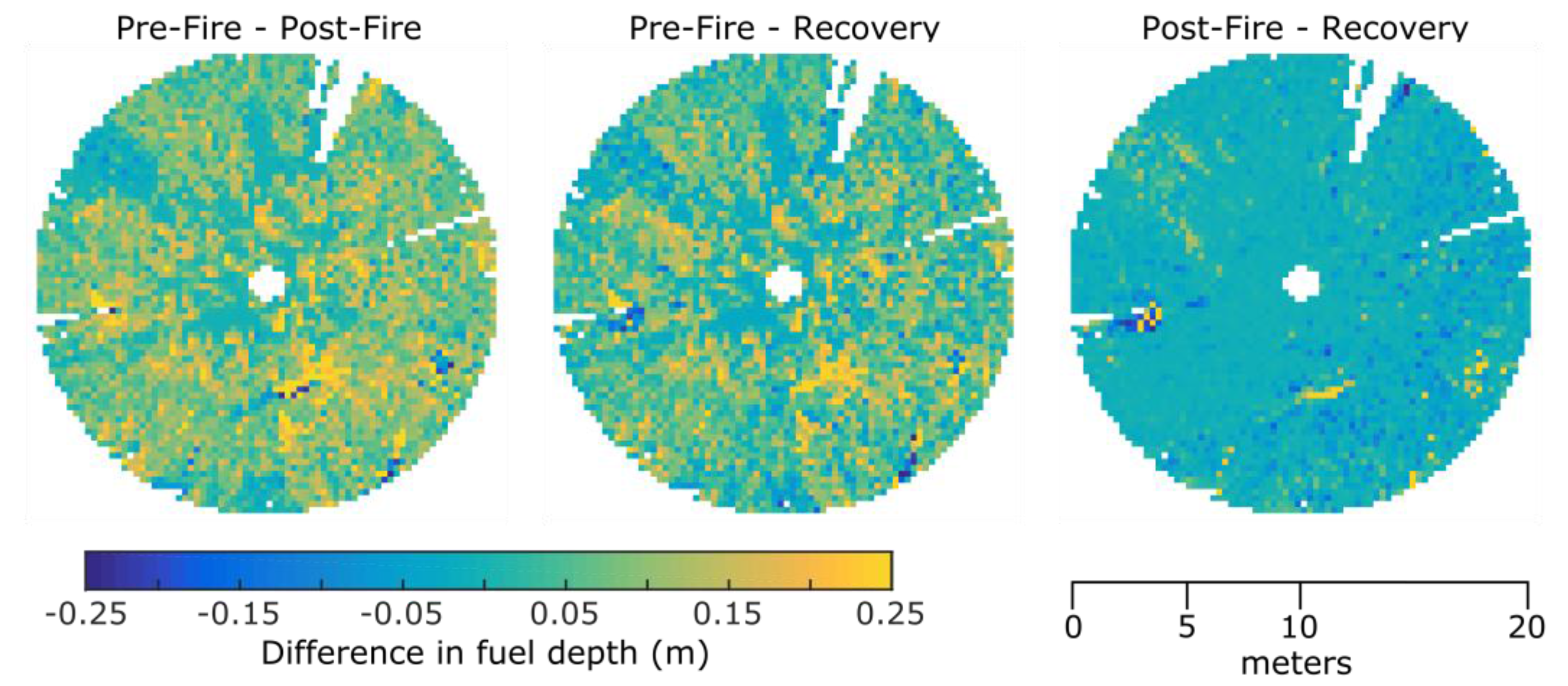
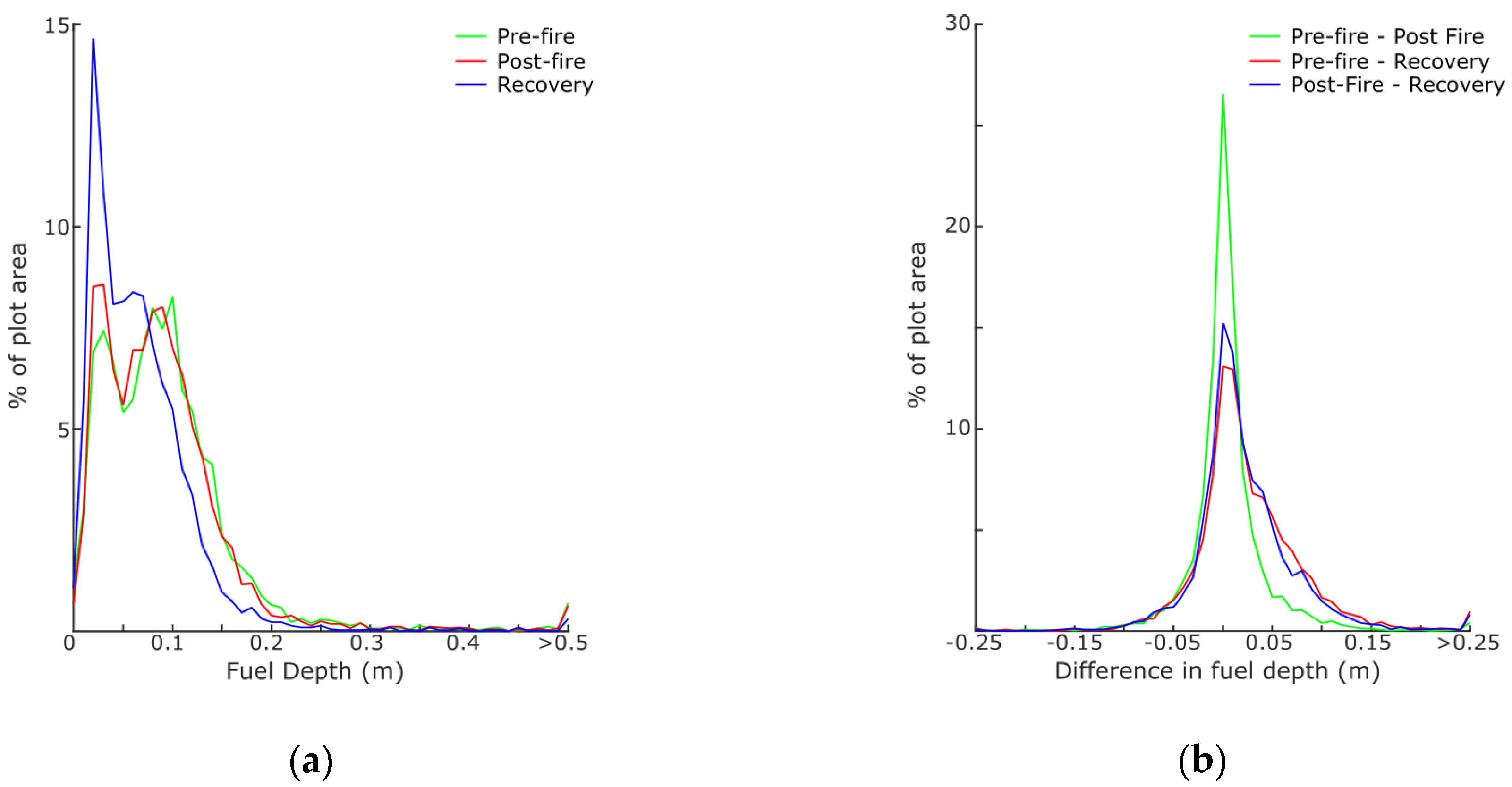
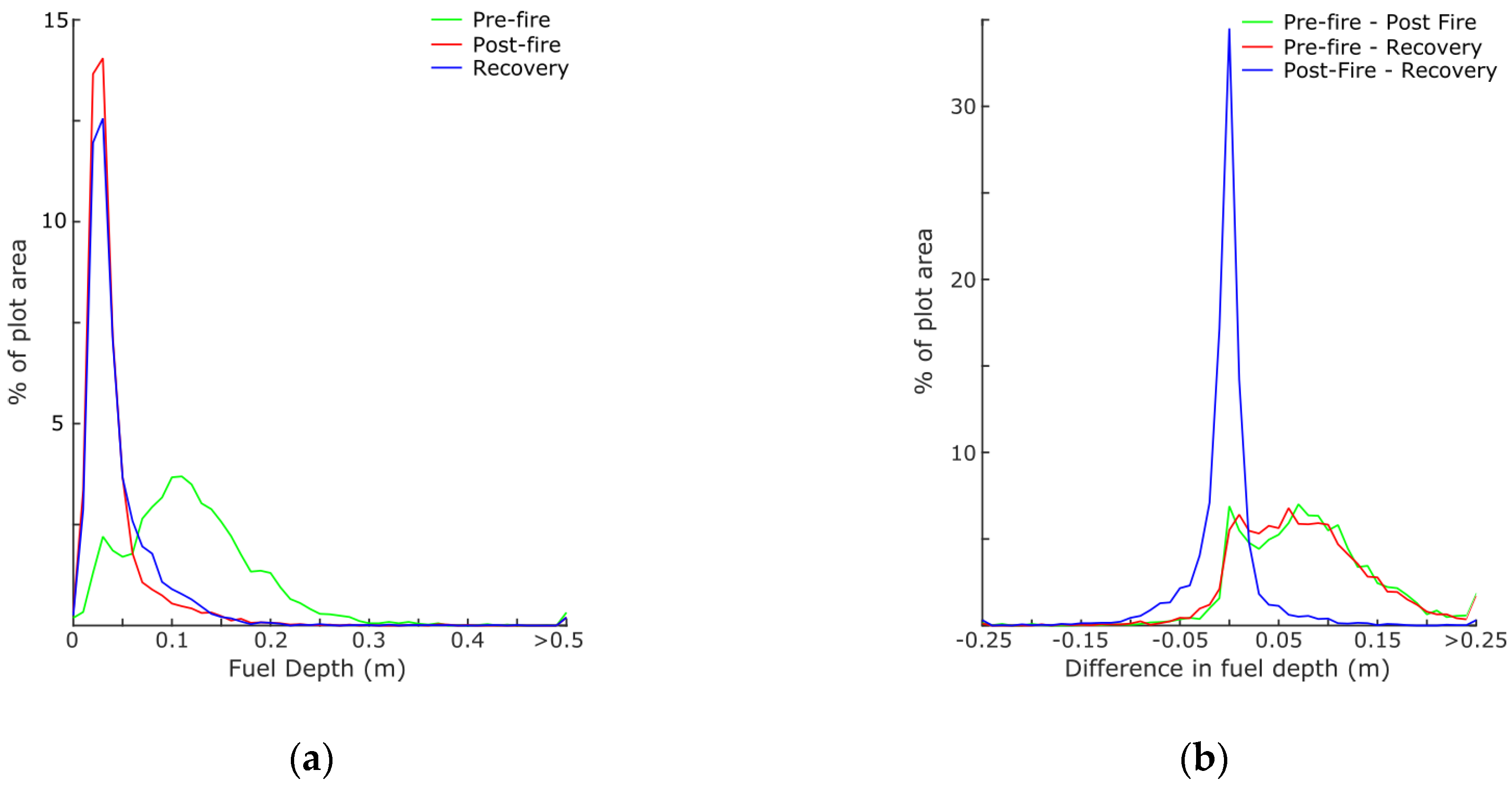
3.2. TLS Described Fuel Hazard Evolution
3.2.1. Pre-Fire Fuel Hazard
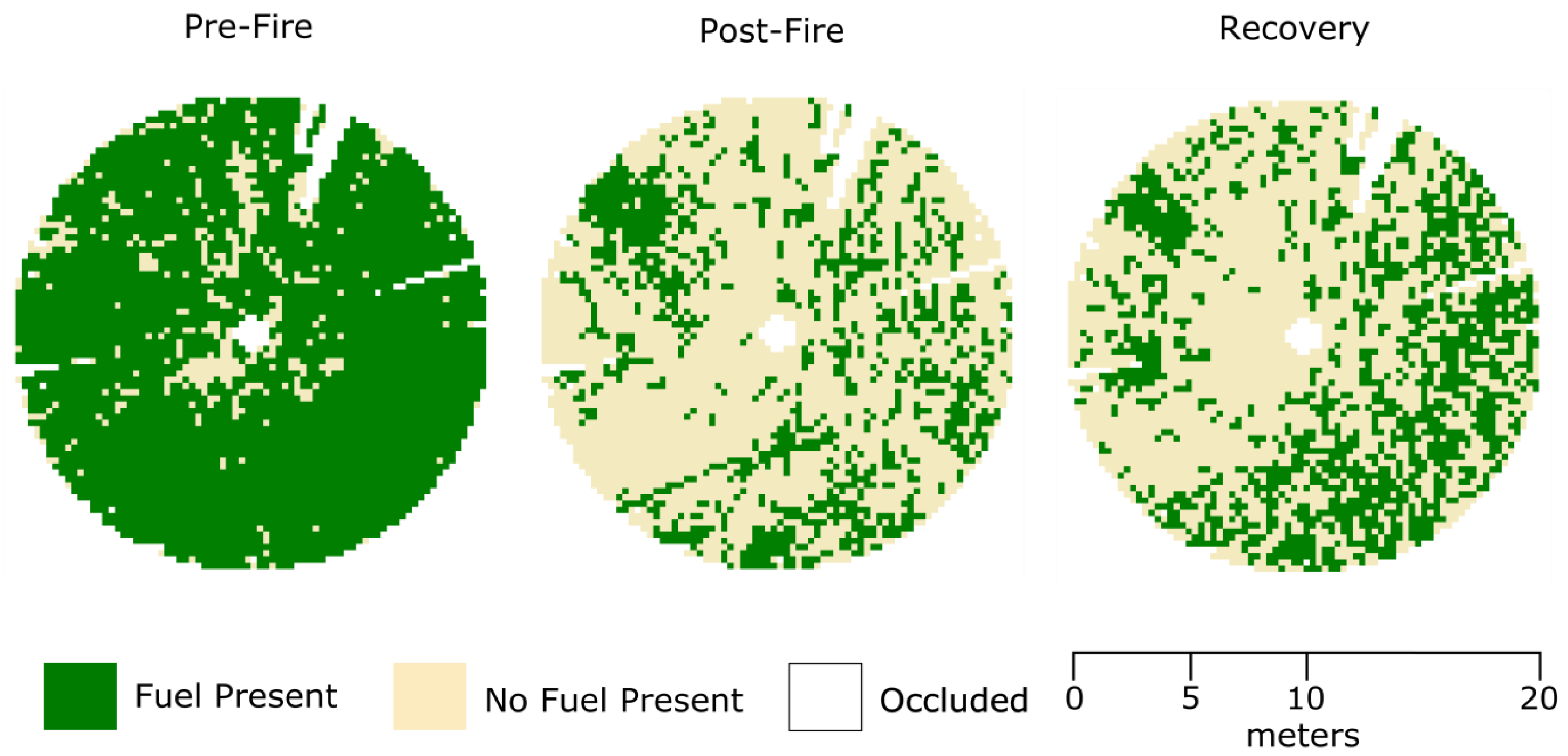
3.2.2. Post-Fire Fuel Hazard Reduction
3.2.3 Post-Fire Vegetation Recovery
3.3 Comparison to Field Observations
4. Discussion
4.1. Multi-Temporal Monitoring of Vegetation and Fuel Hazard Changes Using TLS
4.2. Comparison to Current Fuel Assessment Methods
4.3. Monitoring Implications
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| TLS | Terrestrial Laser Scanner |
| ICP | Iterative Closest Point |
References
- Kenny, B.; Sutherland, E.; Tasker, E.; Bradstock, R. Guidelines for Ecologically Sustainable Fire Management; NSW National Parks and Wildlife Service: Hurstville, NSW, Australia, 2004.
- Stephens, S.L.; Ruth, L.W. Federal forest-fire policy in the United States. Ecol. Appl. 2005, 15, 532–542. [Google Scholar] [CrossRef]
- Attiwill, P.M.; Adams, M.A. Mega-fires, inquiries and politics in the eucalypt forests of Victoria, south-eastern Australia. For. Ecol. Manage. 2013, 294, 45–53. [Google Scholar] [CrossRef]
- Altangerel, K.; Kull, C.A. The prescribed burning debate in Australia: Conflicts and compatibilities. J. Environ. Plan. Manag. 2013, 56, 103–120. [Google Scholar] [CrossRef]
- Keeley, J.E. Fire intensity, fire severity and burn severity: A brief review and suggested usage. Int. J. Wildl. Fire 2009, 18, 116–126. [Google Scholar] [CrossRef]
- Lindenmayer, D.B.; Franklin, J.F.; Fischer, J. General management principles and a checklist of strategies to guide forest biodiversity conservation. Biol. Conserv. 2006, 131, 433–445. [Google Scholar] [CrossRef]
- Hines, F.; Tolhurst, K.G.; Wilson, A.A.G.; McCarthy, G.J. Overall Fuel Hazard Assessment Guide, 4nd ed.Department of Sustainability and Environment: Melbourne, VIC, Australia, 2010.
- Wulder, M.A.; White, J.C.; Alvarez, F.; Han, T.; Rogan, J.; Hawkes, B. Characterizing boreal forest wildfire with multi-temporal Landsat and LIDAR data. Remote Sens. Environ. 2009, 113, 1540–1555. [Google Scholar] [CrossRef]
- Watson, P.J.; Penman, S.H.; Bradstock, R.A. A comparison of bushfire fuel hazard assessors and assessment methods in dry sclerophyll forest near Sydney, Australia. Int. J. Wildl. Fire 2012, 21, 755–763. [Google Scholar] [CrossRef]
- Montealegre, A.; Lamelas, M.; Tanase, M.; de la Riva, J. Forest fire severity assessment using ALS data in a Mediterranean environment. Remote Sens. 2014, 6, 4240–4265. [Google Scholar] [CrossRef]
- Gajardo, J.; García, M.; Riaño, D. Applications of airborne laser scanning in forest fuel assessment and fire prevention. In Forestry Applications of Airborne Laser Scanning; Springer: Dordrecht, The Netherlands, 2014; pp. 439–462. [Google Scholar]
- Newnham, G.; Armston, J.; Muir, J.; Goodwin, N.; Tindall, D.; Culvenor, D.; Püschel, P.; Nyström, M.; Johansen, K. Evaluation of Terrestrial Laser Scanners for Measuring Vegetation Structure; Client Report; CSIRO: Melbourne, VIC, Australia, 2012. [Google Scholar]
- Newnham, G.J.; Armston, J.D.; Calders, K.; Disney, M.I.; Lovell, J.L.; Schaaf, C.B.; Strahler, A.H.; Danson, F.M. Terrestrial laser scanning for plot-scale forest measurement. Curr. For. Rep. 2015, 1, 239–251. [Google Scholar] [CrossRef]
- Rowell, E.M.; Seielstad, C.; Ottma, R.D. Development and validation of fuel height models for terrestrial lidar—RxCADRE 2012. Int. J. Wildl. Fire 2016, 25, 38–47. [Google Scholar] [CrossRef]
- Korpela, I.; Hovi, A.; Morsdorf, F. Understory trees in airborne LiDAR data—Selective mapping due to transmission losses and echo-triggering mechanisms. Remote Sens. Environ. 2012, 119, 92–104. [Google Scholar] [CrossRef]
- Greaves, H.E.; Vierling, L.A.; Eitel, J.U.H.; Boelman, N.T.; Magney, T.S.; Prager, C.M.; Griffin, K.L. Estimating aboveground biomass and leaf area of low-stature Arctic shrubs with terrestrial LiDAR. Remote Sens. Environ. 2015, 164, 26–35. [Google Scholar] [CrossRef]
- Olsoy, P.J.; Glenn, N.F.; Clark, P.E.; Derryberry, D.R. Aboveground total and green biomass of dryland shrub derived from terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2014, 88, 166–173. [Google Scholar] [CrossRef]
- Gupta, V.; Reinke, K.; Jones, S.; Wallace, L.; Holden, L. Assessing metrics for estimating fire induced change in the forest understorey structure using terrestrial laser scanning. Remote Sens. 2015, 7, 8180–8201. [Google Scholar] [CrossRef]
- Hoffmeister, D.; Waldhoff, G.; Korres, W.; Curdt, C.; Bareth, G. Crop height variability detection in a single field by multi-temporal terrestrial laser scanning. Precis. Agric. 2016, 17, 296–312. [Google Scholar] [CrossRef]
- Bareth, G.; Bendig, J.; Tilly, N.; Hoffmeister, D.; Aasen, H.; Bolten, A. A comparison of UAV- and TLS-derived plant height for crop monitoring: Using polygon grids for the analysis of crop surface models (CSMs). Photogramm.-Fernerkund.-Geoinf. 2016, 2, 85–94. [Google Scholar] [CrossRef]
- Crommelinck, S.; Höfle, B. Simulating an autonomously operating low-cost static terrestrial LiDAR for multitemporal maize crop height measurements. Remote Sens. 2016, 8, 205. [Google Scholar] [CrossRef]
- Sankey, J.; Munson, S.; Webb, R.; Wallace, C.; Duran, C. Remote sensing of sonoran desert vegetation structure and phenology with ground-based LiDAR. Remote Sens. 2014, 7, 342–359. [Google Scholar] [CrossRef]
- Cawson, J.; Muir, A. Flora Monitoring Protocols for Planned Burning: A Users Guide, Fire and Adaptive Managment Report No. 74; Department of Sustainability and Environment: Melbourne, VIC, Australia, 2008.
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Holopainen, M.; Melkas, T. Detecting changes in forest structure over time with bi-temporal terrestrial laser scanning data. ISPRS Int. J. Geo-Inf. 2012, 1, 242–255. [Google Scholar] [CrossRef]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.W. Multi-temporal terrestrial laser scanning for modeling tree biomass change. For. Ecol. Manage. 2014, 318, 304–317. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Vierling, L.A.; Magney, T.S. A lightweight, low cost autonomously operating terrestrial laser scanner for quantifying and monitoring ecosystem structural dynamics. Agric. For. Meteorol. 2013, 180, 86–96. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuel Layer | Epoch | Height (m) | Cover (%) |
|---|---|---|---|
| Surface (Litter) | Pre-burn | 0.1 to 0.2 | 40 to 50 |
| Post-burn | 0.1 to 0.2 | 40 to 50 | |
| Recovery | 0.1 to 0.2 | 40 to 50 | |
| Near-surface (Grass) | Pre-burn | 0.2 to 0.3 | 50 to 60 |
| Post-burn | ~ | 50 to 60 | |
| Recovery | 0.2 to 0.3 | 50 to 60 |
| Fuel Layer | Epoch | Height (m) | Cover (%) |
|---|---|---|---|
| Surface (Litter) | Pre-burn | 0.05 to 0.1 | 15 to 20 |
| Post-burn | 0.1 to 0.2 | < 5 | |
| Recovery | 0.1 to 0.2 | 30 to 40 | |
| Near-surface (Grass) | Pre-burn | 0.3 to 0.4 | 50 to 60 |
| Post-burn | ~ | 5 to 10 | |
| Recovery | 0.05 to 0.1 | 30 to 40 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wallace, L.; Gupta, V.; Reinke, K.; Jones, S. An Assessment of Pre- and Post Fire Near Surface Fuel Hazard in an Australian Dry Sclerophyll Forest Using Point Cloud Data Captured Using a Terrestrial Laser Scanner. Remote Sens. 2016, 8, 679. https://doi.org/10.3390/rs8080679
Wallace L, Gupta V, Reinke K, Jones S. An Assessment of Pre- and Post Fire Near Surface Fuel Hazard in an Australian Dry Sclerophyll Forest Using Point Cloud Data Captured Using a Terrestrial Laser Scanner. Remote Sensing. 2016; 8(8):679. https://doi.org/10.3390/rs8080679
Chicago/Turabian StyleWallace, Luke, Vaibhav Gupta, Karin Reinke, and Simon Jones. 2016. "An Assessment of Pre- and Post Fire Near Surface Fuel Hazard in an Australian Dry Sclerophyll Forest Using Point Cloud Data Captured Using a Terrestrial Laser Scanner" Remote Sensing 8, no. 8: 679. https://doi.org/10.3390/rs8080679