Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic

 ,
,
Abstract
:1. Introduction
- (1)
- Investigating improved workflow solutions in the image pre-processing phase aiming to boost SfM reconstruction performances and correct systematic errors.
- (2)
- Assessing the effect of lighting conditions, snow surface type, and camera equipment on the SDEM generation process. This includes investigating the achievable spatial resolutions for each case with the tested equipment.
- (3)
- Evaluating the overall feasibility and performance of the proposed low-cost method to capture snow depth variability for different underlying topographies. This is done by a comparison of the snow depth estimates with traditional snow probing and over snow-free areas.
2. Study Areas and Survey Conditions
2.1. Svalbard Areas
2.2. Greenland Areas
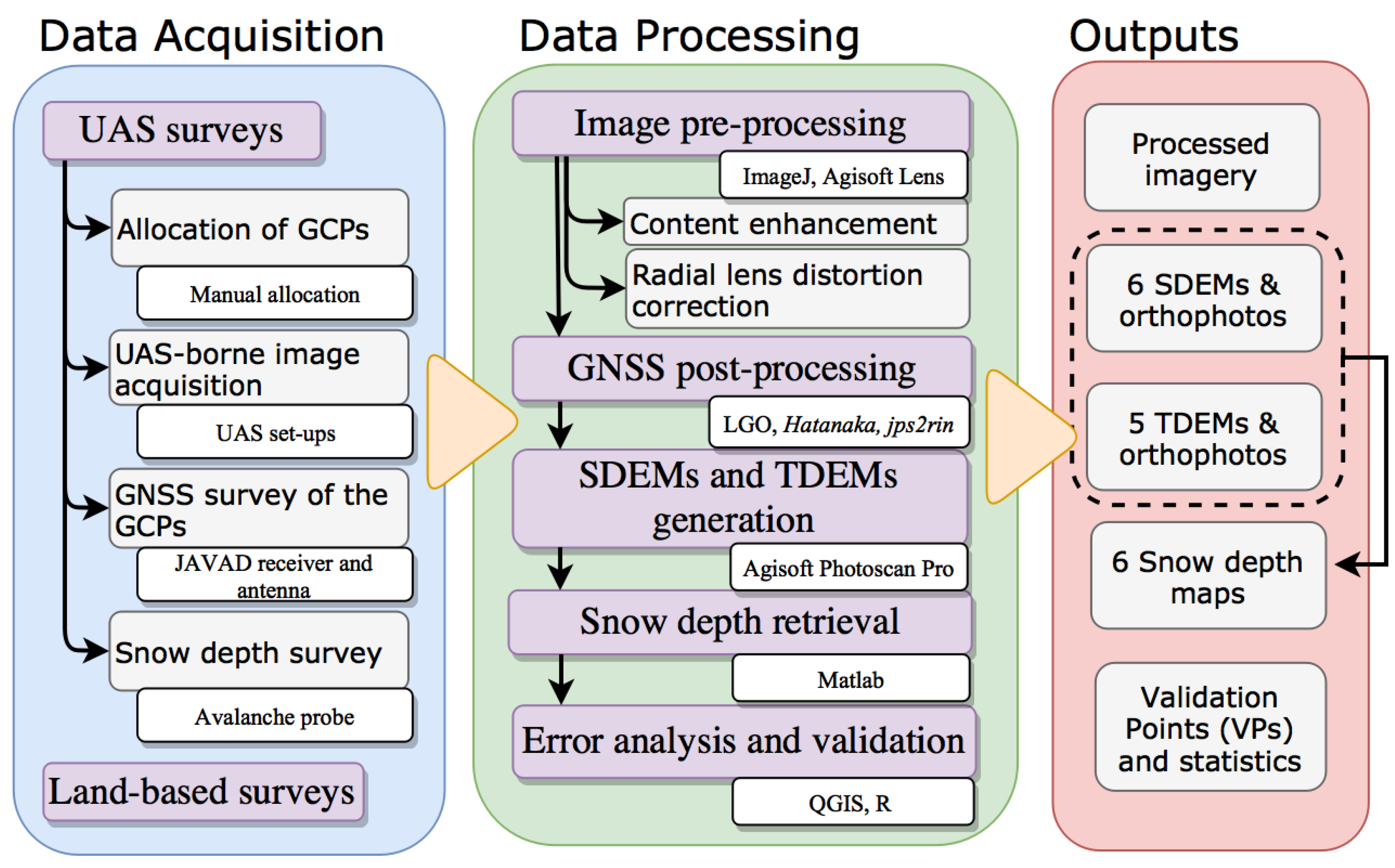
3. Materials and Methods
3.1. UAS Set-Ups
3.1.1. Minimal Set-Up
3.1.2. Advanced Set-Up
3.2. UAS Surveys
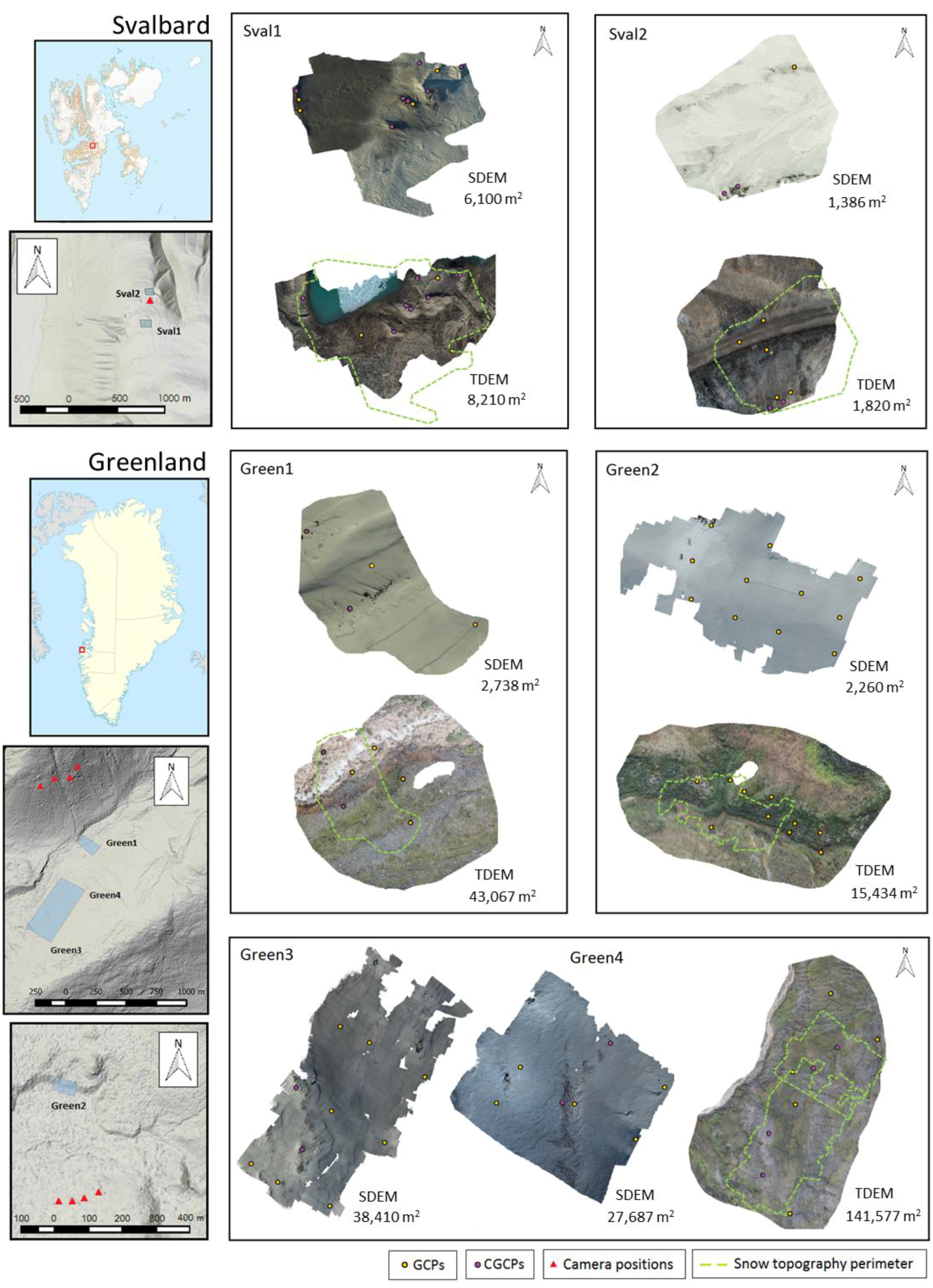
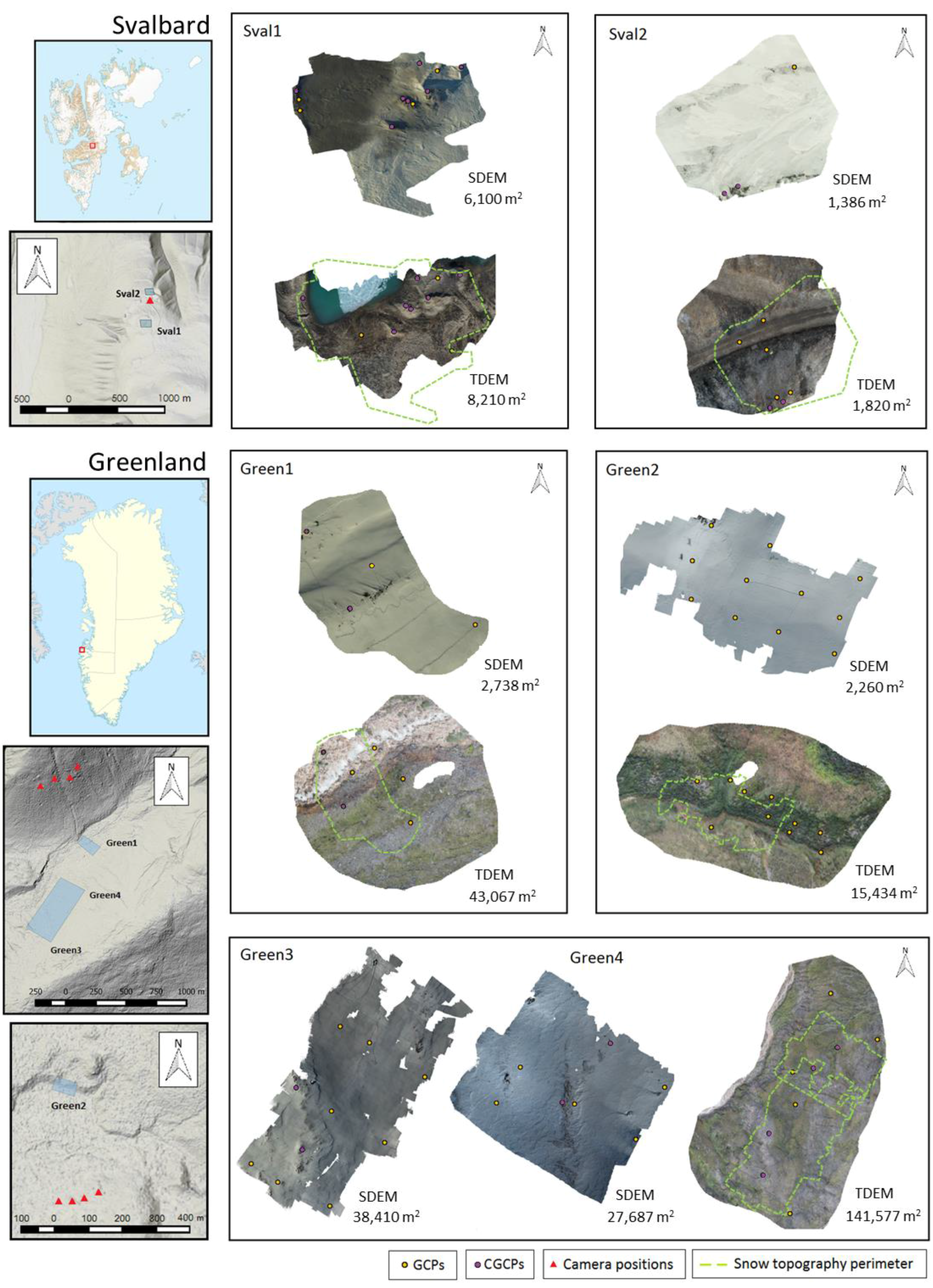
- Allocation of GCPs. GCPs are required for georeferencing the reconstructed 3D model [22,23]. The GCPs were distributed across the surveyed area as widely as possible [32]. All GCPs had a distinctive mark on their surface to precisely pinpoint the GCP on the imagery. They consisted of hand-made targets (circular plates with a centered red-cross) and snow-free features (e.g., overlying boulders, rocks, and ground patches) during winter. During summer, GCPs consisted of easily identifiable marked rocks. Features on snow-free areas, termed co-ground control points (CGCPs), are selected in support of co-georeferencing the SDEMs with the TDEMs [26]. The number of GCPs and CGCPs for each area are listed in Table 1 and positions can be seen in Figure 1. GCPs were carefully deployed to keep the majority of the snow undisturbed. This limited the addition of unnatural features in the snow that could unfairly assist the SfM reconstruction [26].
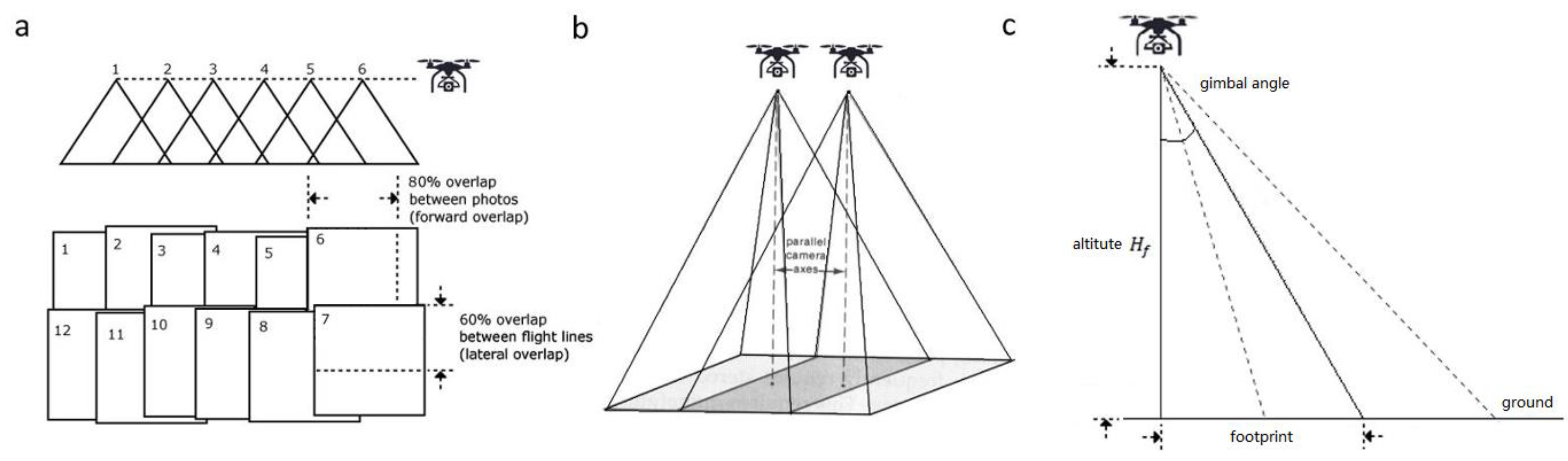
- UAS-borne image acquisition. With the aim of achieving millimeter-scale ground sample distance (GSD), the UAS flying parameters (altitude and speed) and the camera internal parameters (focal length and exposure) were set according to the local surveying characteristics (area extent and environment conditions shown in Table 2) using standard photogrammetric formulas (Appendix B). Millimeter-scale GSD is needed to ensure the downscaled (resampled) image resolution is sufficient to produce DEMs of the variable snow surfaces at the optimal scale. The guidelines and formulas for calculating typical UAS mapping parameters are found in Appendix B. The image acquisition frequency was set to 1 image per second. Once the cameras were configured for each surveyed area, the UAS was flown with a typical systematic mapping pattern with the camera directed orthogonal to the surface (Figure 2a and Appendix B). Additionally, as suggested by [33], a set of slightly oblique imagery is taken for each area by tilting the camera gimbals of ~ 20 degrees from vertical. With this setting, two additional flight transects were conducted for each area with the tilted camera pointing towards the center [33]. The ratio oblique/orthogonal imagery resulted to be around 0.2. Oblique imagery yields an increased ground footprint (Appendix B). Overall, this resulted in a high mean image overlap for the smaller areas mapped with the minimum set-up of Sval1 (>9 for SDEM), Sval2 (9) and Green1 (>9). Areas mapped with the advanced set-up resulted in a medium image overlap of Sval1 (8 for TDEM), Green2 (6), Green3 (8) and Green4 (7). The Nikon D3200 utilized the RAW-file format, i.e., non-compressed data from the camera sensor, which allowed a wider range of post-processing possibilities. The GoPro® Hero 3 compressed the images to JPEG-file format.
- GNSS survey of the GCPs. For the positioning of the GCPs and of a few additional snow depth samples (3 for area Sval2 and 1 for area Green4, taken post-survey), a static GNSS survey was carried out with a JAVAD Legacy receiver and a JAVAD RegAnt antenna (Figure 2b). The geometric center of the antenna was aligned with the center of the GCP marker (red cross midpoint). In cases of irregular topography, we took repeat measurements of the distance from the snow surface to the antenna measuring point and used the average for determining the antenna height. The static GNSS acquisition times ranged from 30 to 90 min with a 1 Hz frequency. Satellites from both the GPS and the GLONASS systems are used in the positioning process.
- Snow depth survey. Snow depth was probed at the GCP and samples positions, repeated five times with a 3 m long avalanche probe marked with a cm scale (Figure 3c). The probing was initially performed directly below the mark of the circular red-crossed plates and thereafter four times around them to validate the snow depth measurement. Multiple measurements were needed to assess the presence of small ground irregularities under the snow cover.
3.3. Land-Based Surveys
3.4. Data Processing
3.4.1. Snow Imagery Pre-Processing
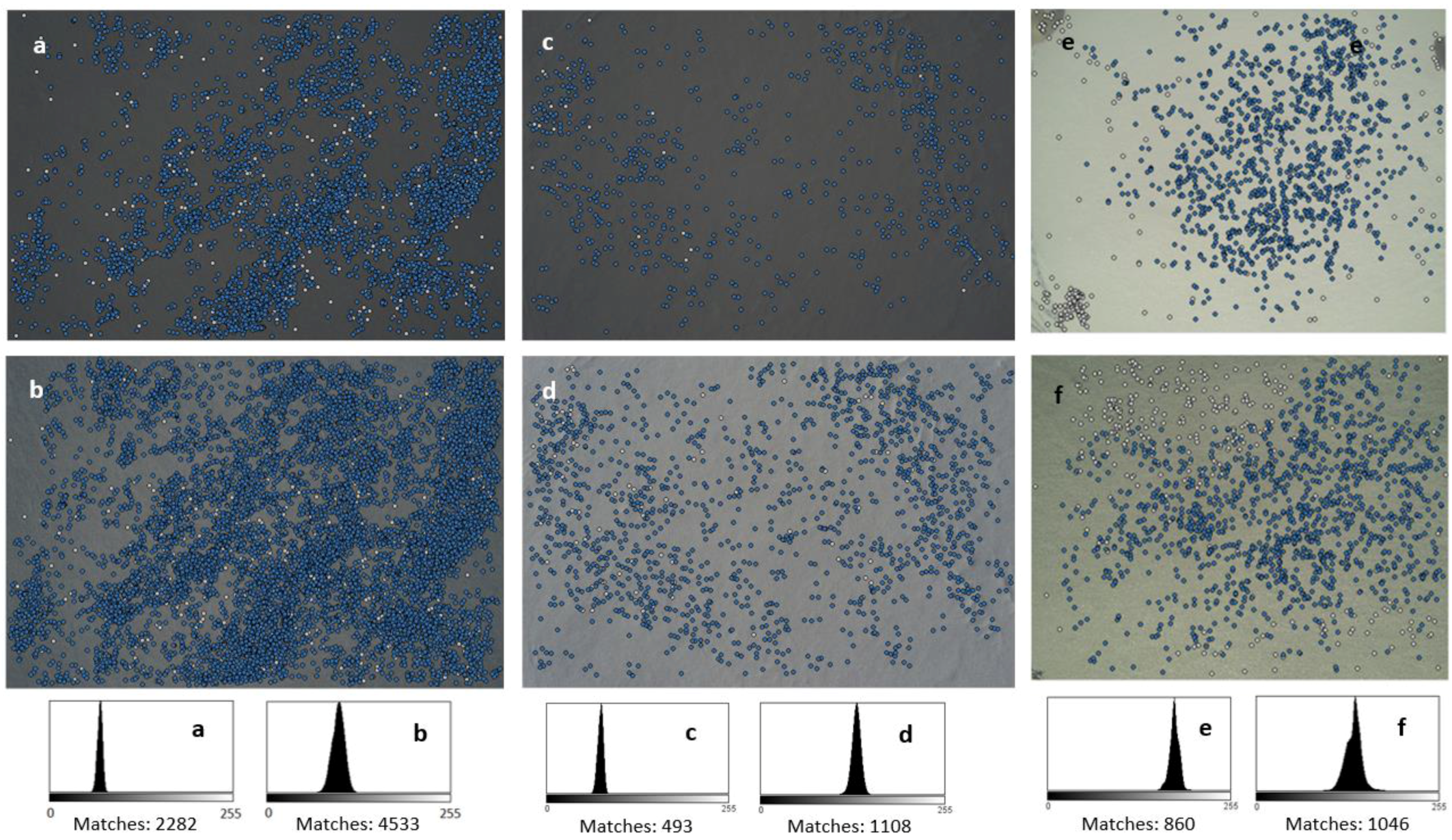
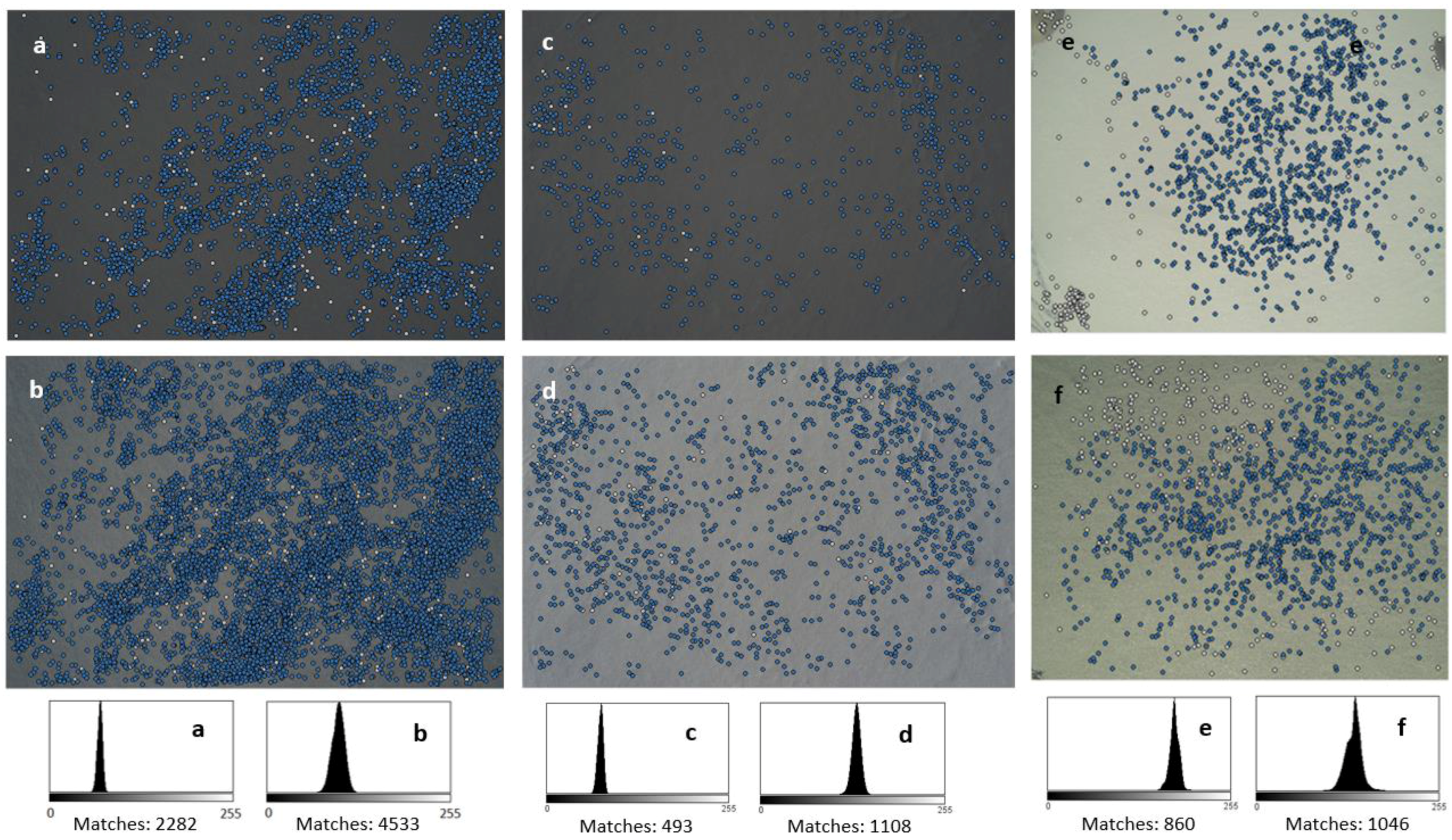
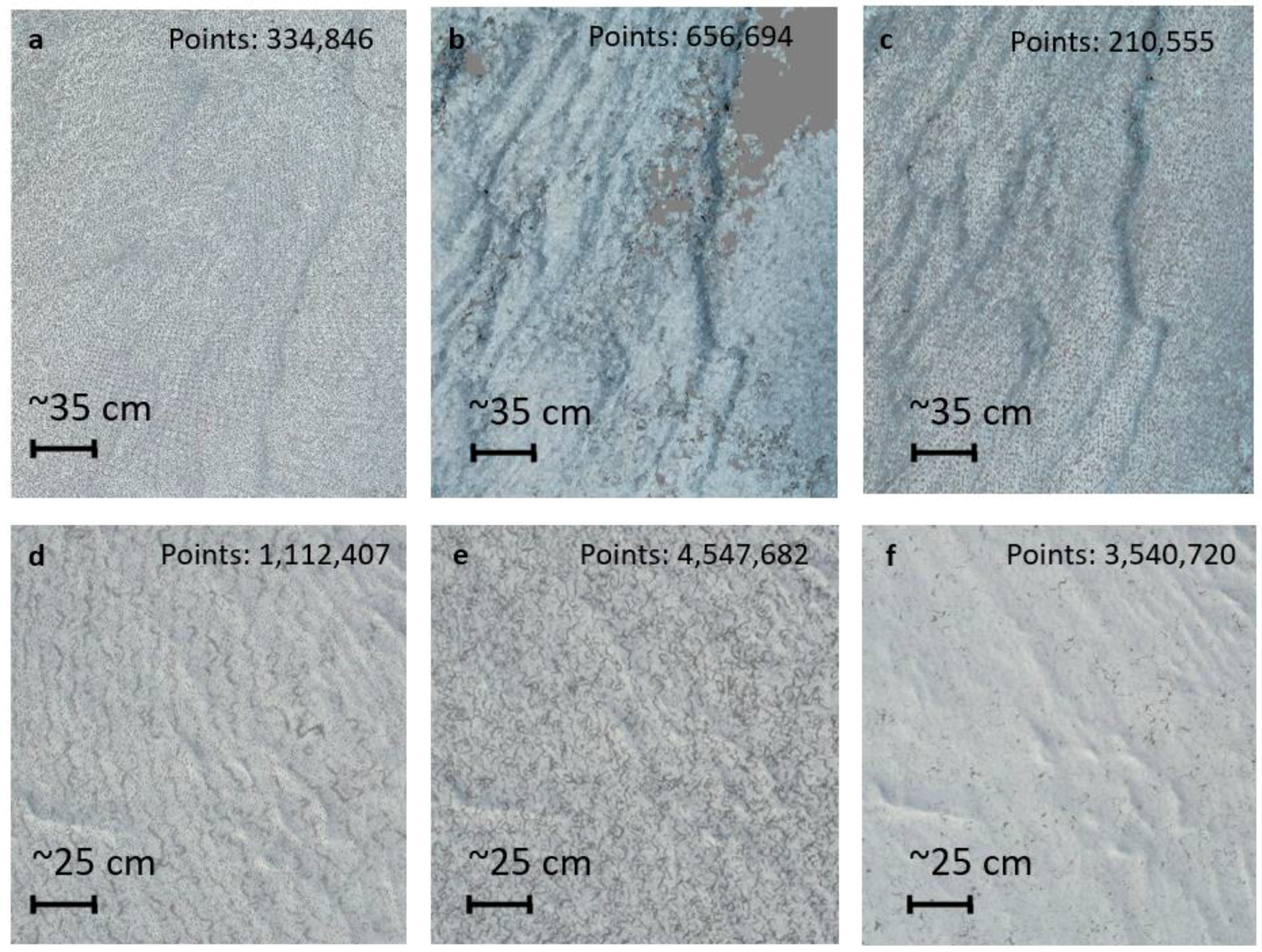
- Content enhancement. Image contrast, defined as the difference in luminance (light) intensity between an image’s object and background [36], is central to feature tracking algorithms. This is because these algorithms extract features from the pixel radiometric intensity levels in an image area and compare them with adjacent ones [37]. An image histogram is a graphical representation of the intensity distribution in a digital image and plots the number of pixels per intensity value. A narrow histogram means that most pixels have similar intensities. For images where snow is the dominant element (around 95% of these Arctic winter datasets), the histogram is usually thin and bell-shaped because of the relatively narrow range of intensities. The aim was to set the histogram as centered as possible with an initial proper exposure correction. This allows the application of a high local contrast enhancement to the mid-tones of the image, which increases the detail in the snow textures while conserving the global contrast in the image, thus safeguarding large-scale shadows and highlighting details. In other words, the process increases the contrast without reducing the dynamic range (defined as the range of light intensities from the darkest shadows to the brightest highlights). This results in a wider image histogram compared to the non-processed one and plays a similar role as traditional histogram stretching and equalization methods for enhancing features in image data [38]. Centering and spreading the histogram along the whole dynamic range means that more nuances in intensity values will be available for pattern recognition, improving the performance of the SfM framework. Traditional edge sharpening is also applied to enhance small-scale sastrugi and snow ripples. However, both contrast enhancement and sharpening can introduce undesired digital noise [39], so the effect of this noise on the reconstructed surfaces was carefully evaluated. The process was applied in batch mode for each area (characterized by the same camera settings and luminance).
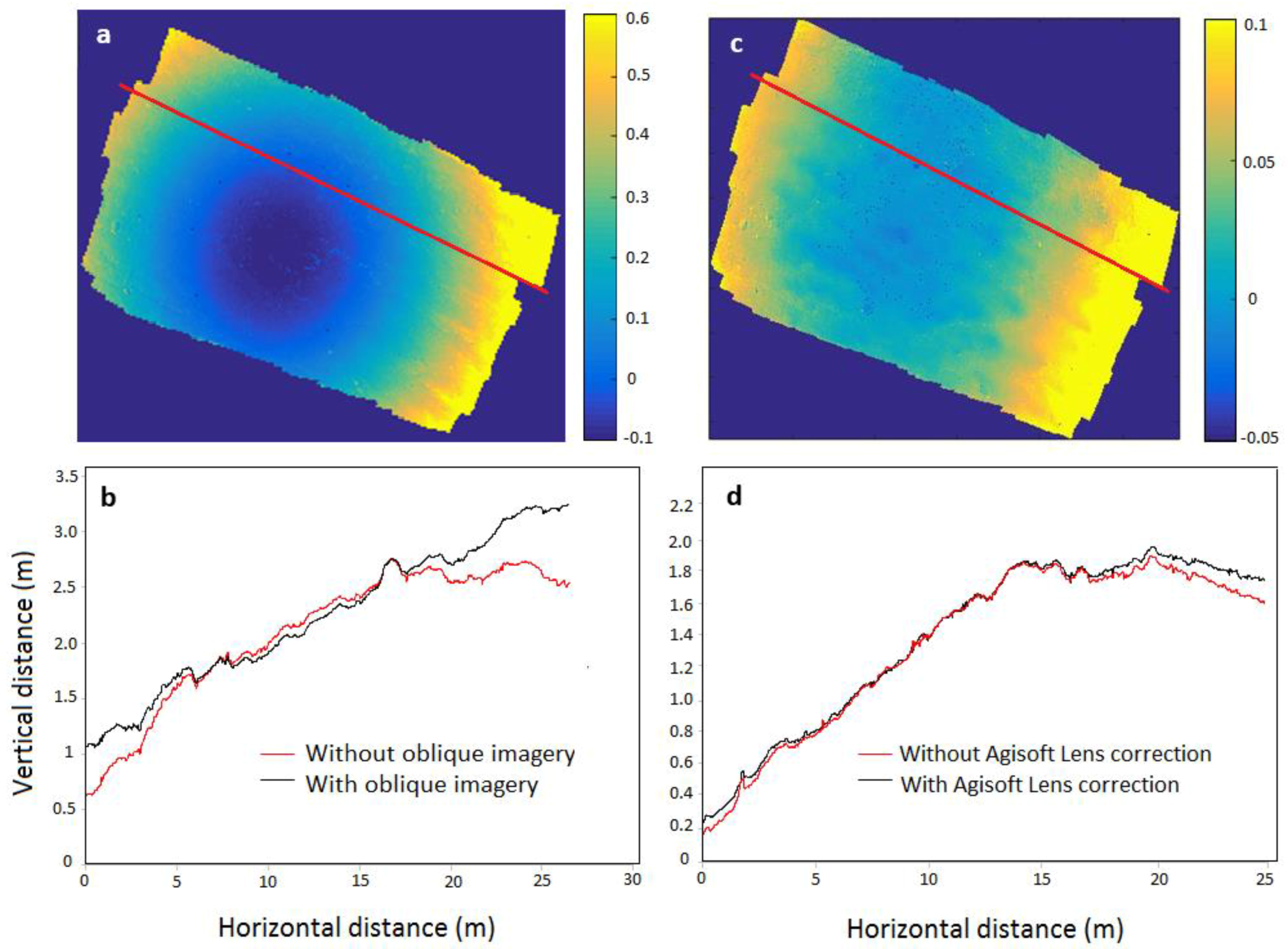
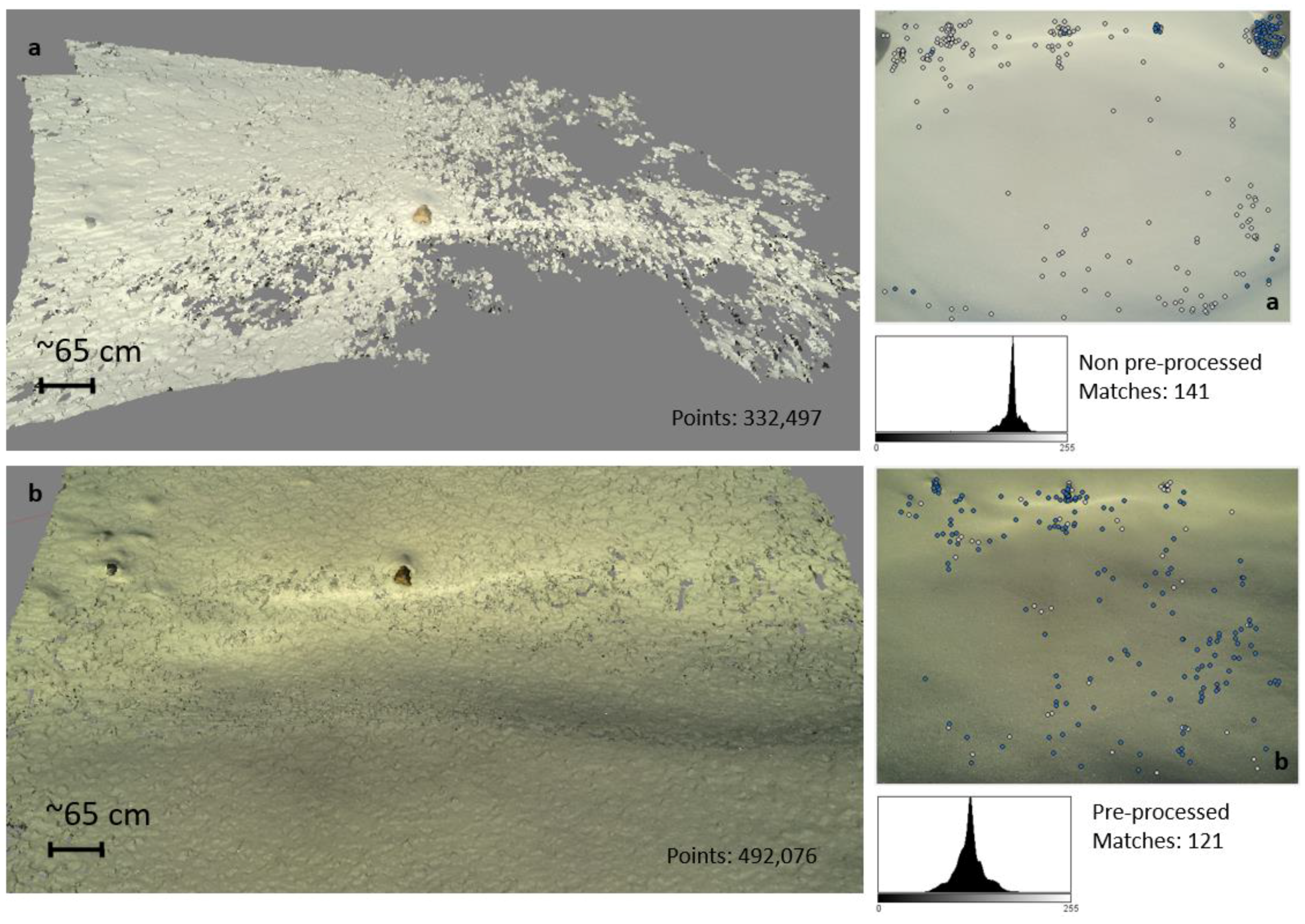
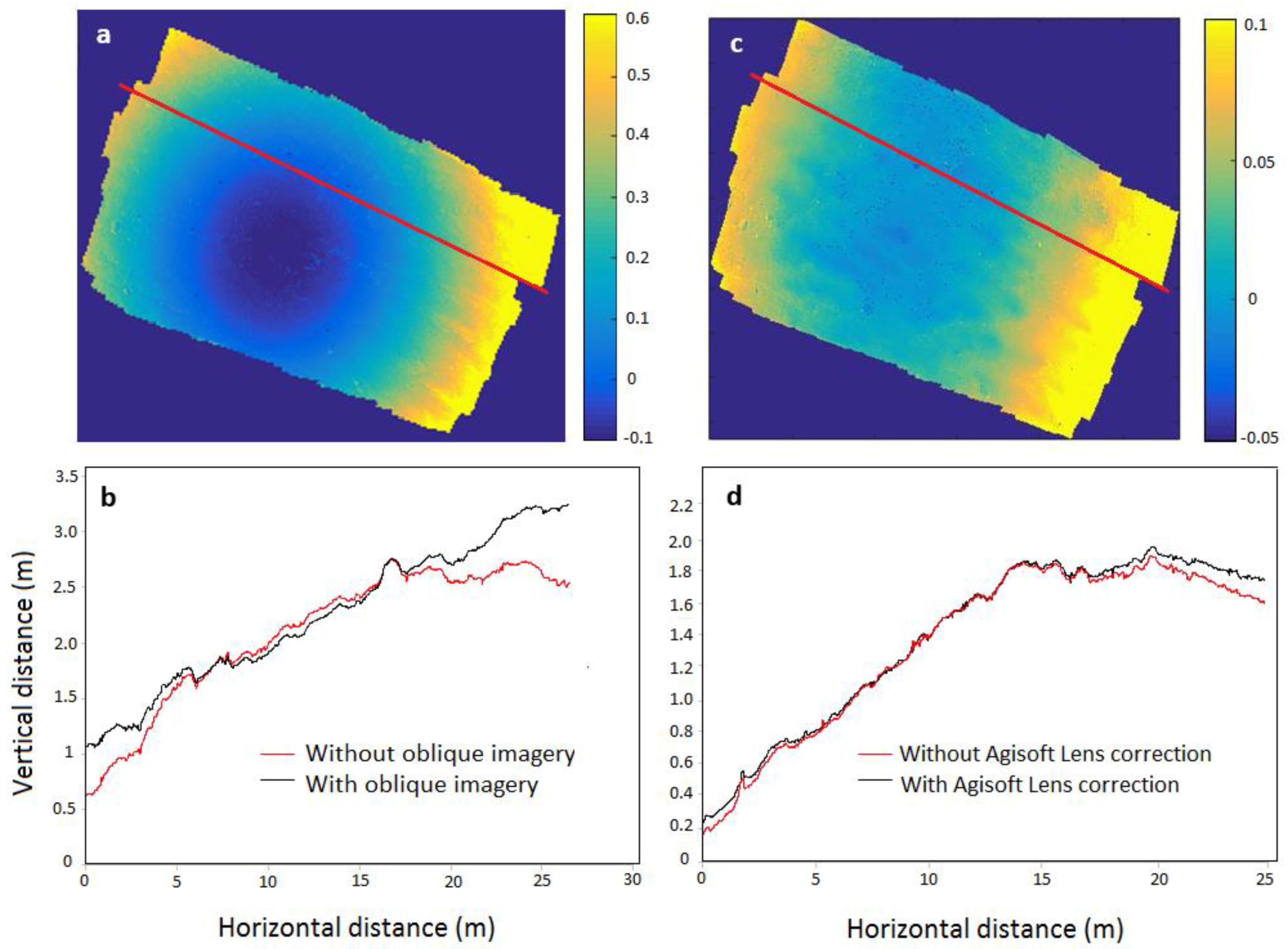
- Radial lens distortion correction. The geometry of the camera lens accounts for some degree of distortion in the images [36,40]. Radial distortion particularly affects the geometry of the image and is accentuated as the focal length is reduced, thereafter having a direct impact in SfM reconstructions and generating non-linear deformations in the 3D models if the FOV angle is wide [40]. Recent studies show that systematic errors in topographic models derived from UAS-borne SfM surveys might arise in the photogrammetric reconstruction due to a combination of the near-parallel imaging collection pathways taken in traditional UAS mapping surveys, and an inaccurate correction of radial lens distortion [33]. A solution to this issue was investigated by testing two different approaches; the use of the freely available Agisoft Lens and the addition ‘striped’ oblique imagery over a small snow-covered surface generated from an imagery sub-set.
3.4.2. GNSS Post-Processing of GCP Data
3.4.3. SDEMs and TDEMs Generation in Agisoft Photoscan Pro
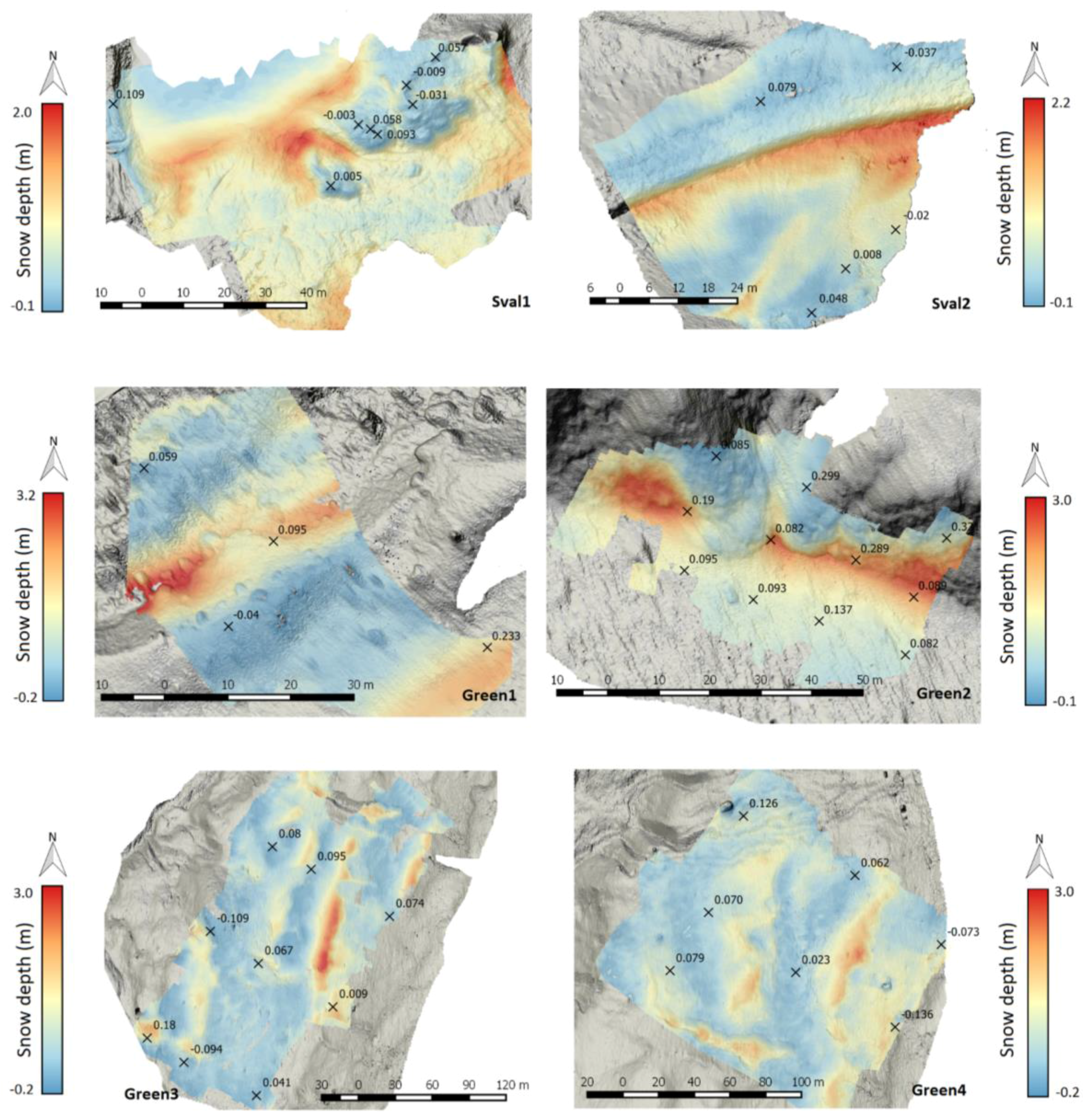
3.4.4. Snow Depth Retrieval
3.4.5. Error Analysis and Quality Assessment of the Snow Depth Maps
4. Results
4.1. SDEMs and TDEMs Reconstruction
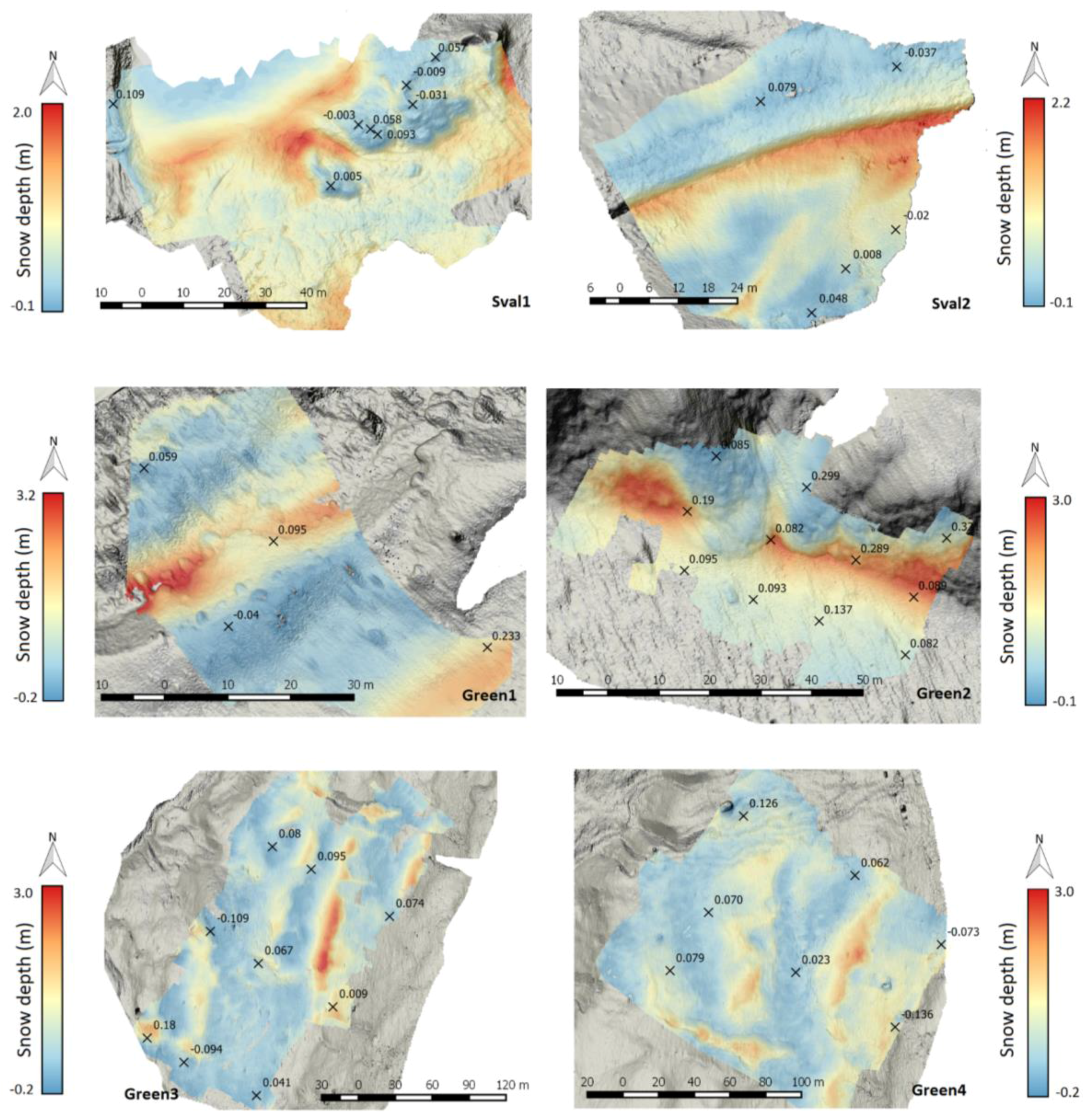
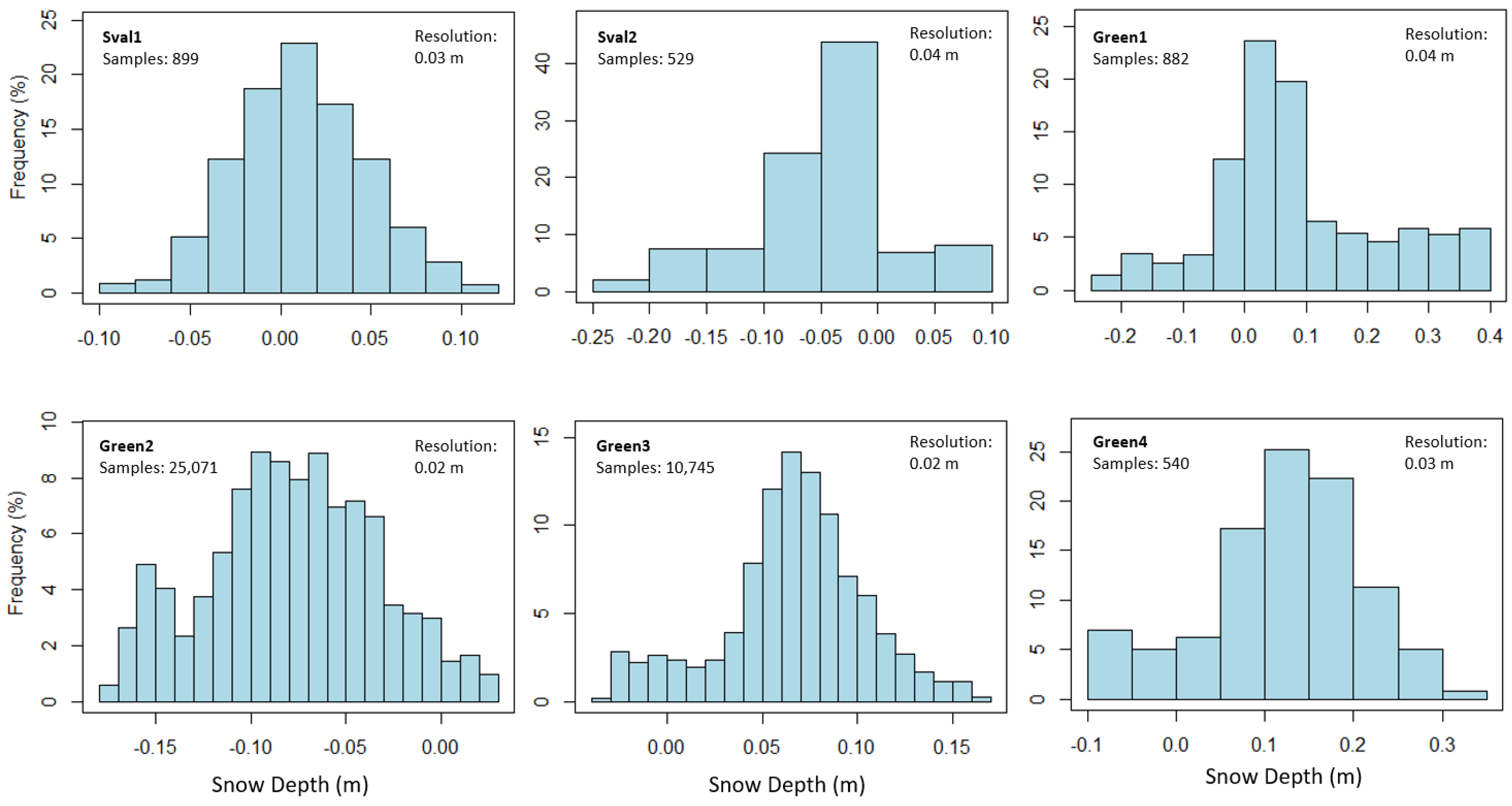
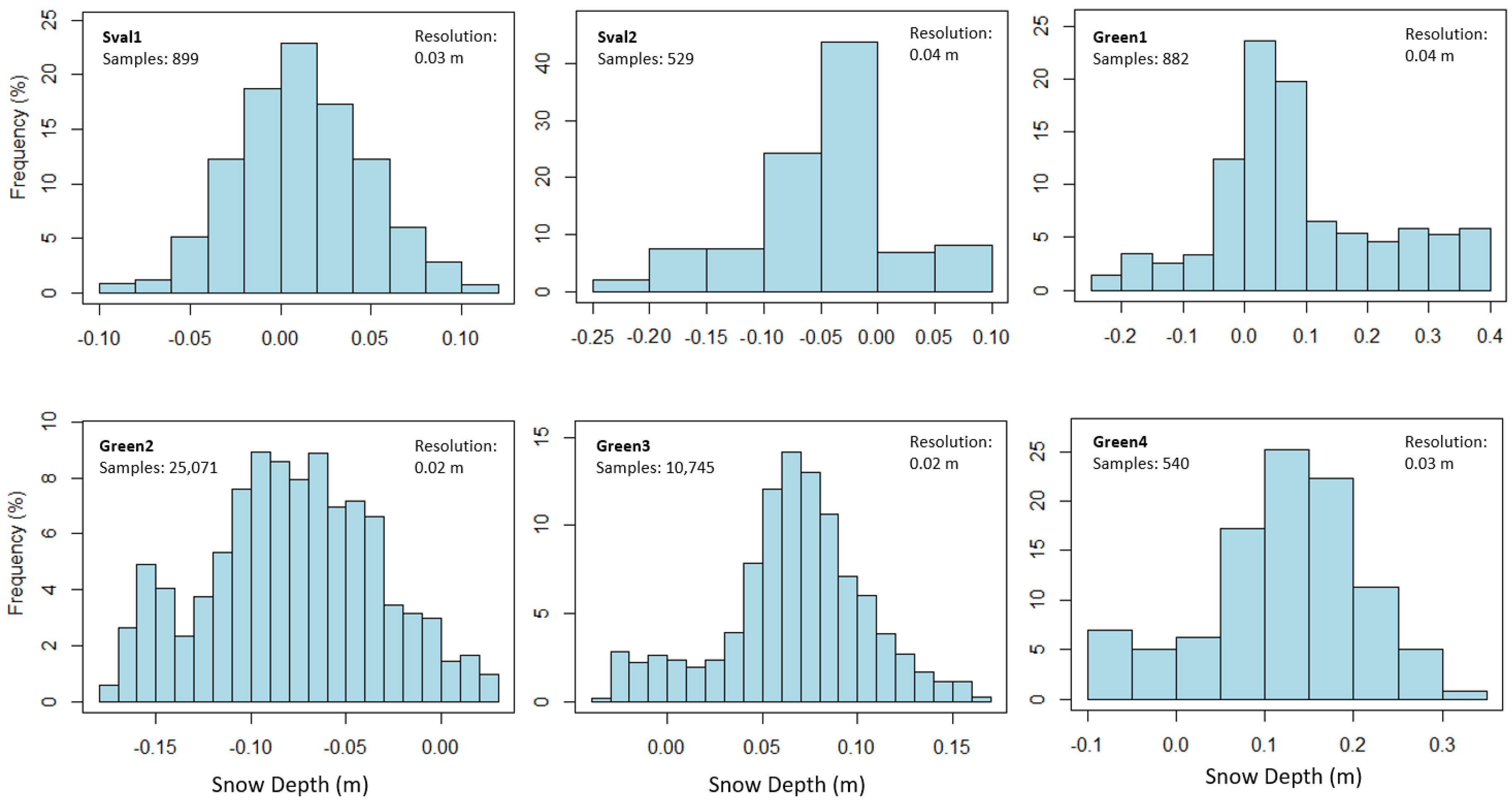
4.2. Snow Depth Retrieval
5. Discussion
5.1. Effect of Snow Surface Type, Light Conditions, and Image Quality
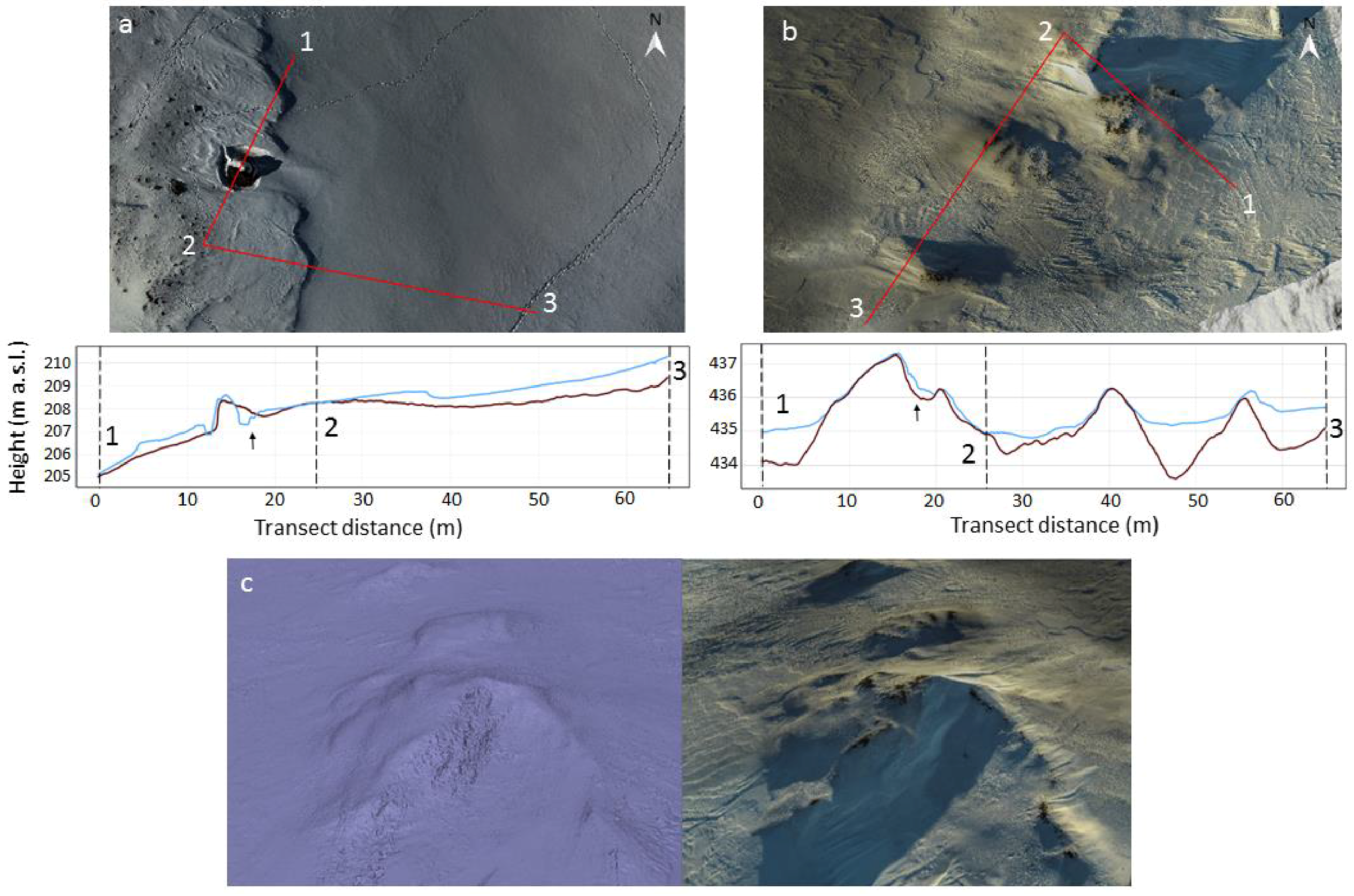
5.2. Effect of Underlying Topography
5.3. The Niche Role of Low-Cost UAS Platforms for Snow Depth Mapping in the Arctic
5.4. GCPs Limitation and Co-Georeferencing
5.5. Validation Caveats
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. UAS Regulations in the Arctic
Appendix B. SfM Mapping with UAS Platforms and Considerations for Snow-Covered Arctic Locations

Appendix C. Results of the Snow Imagery Pre-Processing


References
- Bokhorst, S.; Pedersen, S.H.; Brucker, L.; Anisimov, O.; Bjerke, J.W.; Brown, R.D.; Ehrich, D.; Essery, R.L.H.; Heilig, A.; Ingvander, S.; et al. Changing Arctic snow cover: A review of recent developments and assessment of future needs for observations, modelling, and impacts. Ambio 2016, 45, 516–537. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Callaghan, T.V.; Johansson, M.; Brown, R.D.; Groisman, P.Y.; Labba, N.; Radionov, V.; Bradley, R.S.; Blangy, S.; Bulygina, O.N.; Christensen, T.R.; et al. Multiple Effects of Changes in Arctic Snow Cover. Ambio 2011, 40, 32–45. [Google Scholar] [CrossRef]
- Morgner, E.; Elberling, B.; Strebel, D.; Cooper, E.J. The importance of winter in annual ecosystem respiration in the High Arctic: Effects of snow depth in two vegetation types. Polar Res. 2010, 29, 58–74. [Google Scholar] [CrossRef]
- Wipf, S.; Stoeckli, V.; Bebi, P. Winter climate change in alpine tundra: Plant responses to changes in snow depth and snowmelt timing. Clim. Chang. 2009, 94, 105–121. [Google Scholar] [CrossRef]
- Gisnås, K.; Westermann, S.; Schuler, T.V.; Litherland, T.; Isaksen, K.; Boike, J.; Etzelmüller, B. A statistical approach to represent small-scale variability of permafrost temperatures due to snow cover. Cryosphere 2014, 8, 2063–2074. [Google Scholar] [CrossRef]
- Slater, A.G.; Lawrence, D.M. Diagnosing Present and Future Permafrost from Climate Models. J. Clim. 2013, 26, 5608–5623. [Google Scholar] [CrossRef]
- Campbell, K.; Mundy, C.J.; Barber, D.G.; Gosselin, M. Characterizing the sea ice algae chlorophyll a–snow depth relationship over Arctic spring melt using transmitted irradiance. J. Mar. Syst. 2015, 147, 76–84. [Google Scholar] [CrossRef]
- Haapala, J.; Lensu, M.; Dumont, M.; Renner, A.H.H.; Granskog, M.A.; Gerland, S. Small-scale horizontal variability of snow, sea-ice thickness and freeboard in the first-year ice region north of Svalbard. Ann. Glaciol. 2013, 54, 261–266. [Google Scholar] [CrossRef]
- Alavedra, J.M.I.; Iglesias, J.P.; López, J.T.; Figueras, P.M.I.; Baños, I.M.; Figueras, P.O.I.; García, A.R. Assessment of airborne LIDAR for snowpack depth modeling. Bol. Soc. Geol. Mex. 2011, 63, 95–107. [Google Scholar]
- Grünewald, T.; Stötter, J.; Pomeroy, J.W.; Dadic, R.; Moreno Baños, I.; Marturià, J.; Spross, M.; Hopkinson, C.; Burlando, P.; Lehning, M. Statistical modelling of the snow depth distribution in open alpine terrain. Hydrol. Earth Syst. Sci. 2013, 17, 3005–3021. [Google Scholar] [CrossRef]
- López-Moreno, J.I.; Revuelto, J.; Fassnacht, S.R.; Azorín-Molina, C.; Vicente-Serrano, S.M.; Morán-Tejeda, E.; Sexstone, G.A. Snowpack variability across various spatio-temporal resolutions. Hydrol. Process. 2014, 29, 1213–1224. [Google Scholar] [CrossRef]
- Barnett, T.P.; Adam, J.C.; Lettenmaier, D.P. Potential impacts of a warming climate on water availability in snow-dominated regions. Nature 2005, 438, 303–309. [Google Scholar] [CrossRef] [PubMed]
- Schweizer, J.; Kronholm, K.; Jamieson, J.B.; Birkeland, K.W. Review of spatial variability of snowpack properties and its importance for avalanche formation. Cold Reg. Sci. Technol. 2008, 51, 253–272. [Google Scholar] [CrossRef]
- Tominaga, Y.; Okaze, T.; Mochida, A. CFD modeling of snowdrift around a building: An overview of models and evaluation of a new approach. Build. Environ. 2011, 46, 899–910. [Google Scholar] [CrossRef]
- Scipión, D.E.; Mott, R.; Lehning, M.; Schneebeli, M.; Berne, A. Seasonal small-scale spatial variability in alpine snowfall and snow accumulation. Water Resour. Res. 2013, 49, 1446–1457. [Google Scholar] [CrossRef]
- Callaghan, T.V.; Johansson, M.; Brown, R.D.; Groisman, P.Y.; Labba, N.; Radionov, V.; Barry, R.G.; Bulygina, O.N.; Essery, R.L.H.; Frolov, D.M.; et al. The Changing Face of Arctic Snow Cover: A Synthesis of Observed and Projected Changes. Ambio 2011, 40, 17–31. [Google Scholar] [CrossRef]
- Melvold, K.; Skaugen, T. Multiscale spatial variability of lidar-derived and modeled snow depth on Hardangervidda, Norway. Ann. Glaciol. 2013, 54, 273–281. [Google Scholar] [CrossRef]
- Prokop, A.; Schirmer, M.; Rub, M.; Lehning, M.; Stocker, M. A comparison of measurement methods: Terrestrial laser scanning, tachymetry and snow probing for the determination of the spatial snow-depth distribution on slopes. Ann. Glaciol. 2008, 49, 210–216. [Google Scholar] [CrossRef]
- Liston, G.E.; Sturm, M. Winter Precipitation Patterns in Arctic Alaska Determined from a Blowing-Snow Model and Snow-Depth Observations. J. Hydrometeorol. 2002, 3, 646–659. [Google Scholar] [CrossRef]
- Slater, A.G.; Clark, M.P. Snow Data Assimilation via an Ensemble Kalman Filter. J. Hydrometeorol. 2006, 7, 478–493. [Google Scholar] [CrossRef]
- Deems, J.S.; Painter, T.H.; Finnegan, D.C. Lidar measurement of snow depth: A review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2015, 40, 247–275. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Ryan, J.C.; Hubbard, A.L.; Box, J.E.; Todd, J.; Christoffersen, P.; Carr, J.R.; Holt, T.O.; Snooke, N. UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere 2015, 9, 1–11. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Bösch, R.; Stoffel, A. Mapping snow depth in alpine terrain with unmanned aerial systems (UAS): Potential and limitations. Cryosphere 2016, 10, 1075–1088. [Google Scholar] [CrossRef]
- De Michele, C.; Avanzi, F.; Passoni, D.; Barzaghi, R.; Pinto, L.; Dosso, P.; Ghezzi, A.; Gianatti, R.; Vedova, G.D. Using a fixed-wing UAS to map snow depth distribution: An evaluation at peak accumulation. Cryosphere 2016, 10, 511–522. [Google Scholar] [CrossRef]
- Jagt, B.; Lucieer, A.; Wallace, L.; Turner, D.; Durand, M. Snow Depth Retrieval with UAS Using Photogrammetric Techniques. Geosciences 2015, 5, 264–285. [Google Scholar] [CrossRef]
- Nolan, M.; Larsen, C.; Sturm, M. Mapping snow depth from manned aircraft on landscape scales at centimeter resolution using structure-from-motion photogrammetry. Cryosphere 2015, 9, 1445–1463. [Google Scholar] [CrossRef]
- Furukawa, Y.; Sethi, A.; Ponce, J.; Kriegman, D. Structure and motion from images of smooth textureless objects. In Computer Vision-ECCV 2004; Springer: Berlin/Heidelberg, Germany, 2004; pp. 287–298. [Google Scholar]
- Gaiani, M.; Remondino, F.; Apollonio, F.; Ballabeni, A. An Advanced Pre-Processing Pipeline to Improve Automated Photogrammetric Reconstructions of Architectural Scenes. Remote Sens. 2016, 8, 178. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Marcer, M.; Stentoft, P.A.; Bjerre, E.; Cimoli, E.; Bjørk, A.; Stenseng, L.; Machguth, H. Three decades of volume change of a small Greenlandic glacier using ground penetrating radar, Structure from Motion, and aerial photogrammetry. Arct. Antarct. Alp. Res. 2017, 49, 411–425. [Google Scholar] [CrossRef]
- Agisoft PhotoScan User Manual. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_2_en.pdf (accessed on 7 November 2017).
- Jacobson, R.E. (Ed.) The Manual of Photography: Photographic and Digital Imaging, 9th ed.; Focal Press: Oxford, UK; Boston, MA, USA, 2000. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Gauch, J.M. Noise removal and contrast enhancement. In The Colour Image Processing Handbook; Sangwine, S.J., Horne, R.E.N., Eds.; Springer: Boston, MA, USA, 1998; pp. 149–162. [Google Scholar]
- Ji, T.-L.; Sundareshan, M.K.; Roehrig, H. Adaptive image contrast enhancement based on human visual properties. IEEE Trans. Med. Imaging 1994, 13, 573–586. [Google Scholar] [CrossRef] [PubMed]
- Balletti, C.; Guerra, F.; Tsioukas, V.; Vernier, P. Calibration of Action Cameras for Photogrammetric Purposes. Sensors 2014, 14, 17471–17490. [Google Scholar] [CrossRef] [PubMed]
- Ghilani, C.D.; Wolf, P.R. Elementary Surveying: An Introduction to Geomatics, 13th ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2012. [Google Scholar]
- López-Moreno, J.I.; Fassnacht, S.R.; Heath, J.T.; Musselman, K.N.; Revuelto, J.; Latron, J.; Morán-Tejeda, E.; Jonas, T. Small scale spatial variability of snow density and depth over complex alpine terrain: Implications for estimating snow water equivalent. Adv. Water Resour. 2013, 55, 40–52. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Stoffel, A.; Boesch, R. Photogrammetric reconstruction of homogenous snow surfaces in alpine terrain applying near-infrared UAS imagery. Int. J. Remote Sens. 2017, 38, 3135–3158. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Raoult, V.; David, P.A.; Dupont, S.F.; Mathewson, C.P.; O’Neill, S.J.; Powell, N.N.; Williamson, J.E. GoPros™ as an underwater photogrammetry tool for citizen science. PeerJ 2016, 4, e1960. [Google Scholar] [CrossRef] [PubMed]
- Solbø, S.; Storvold, R. Mapping svalbard glaciers with the cryowing uas. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 373–377. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Avanzi, F.; Bianchi, A.; Cina, A.; De Michele, C.; Maschio, P.; Pagliari, D.; Pinto, L.; Piras, M.; Rossi, L. Measuring the snowpack depth with Unmanned Aerial System photogrammetry: comparison with manual probing and a 3D laser scanning over a sample plot. Cryosphere Discuss. 2017. in review. [Google Scholar] [CrossRef]
- Crowe, W.; Davis, K.D.; la Cour-Harbo, A.; Vihma, T.; Lesenkov, S.; Eppi, R.; Weatherhead, E.C.; Liu, P.; Raustein, M.; Abrahamsson, M.; et al. Enabling Science Use of Unmanned Aircraft Systems for Arctic Environmental Monitoring; AMAP: Oslo, Norway, 2012. [Google Scholar]
- Lisein, J.; Linchant, J.; Lejeune, P.; Bouché, P.; Vermeulen, C. Aerial surveys using an unmanned aerial system (UAS): Comparison of different methods for estimating the surface area of sampling strips. Trop. Conserv. Sci. 2013, 6, 506–520. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area Name | Coordinates (Lat/Lon in WGS 84) | Survey Date (dd/mm/yyyy) | Luminance Conditions | Snow Surface Type | Physiography Descriptors | Number of GCPs | CGCPs | ||
|---|---|---|---|---|---|---|---|---|---|
| SDEM | TDEM | SDEM | SDEM | TDEM | SDEM | TDEM | |||
| Sval1 | 78°09′23″N | 5/April/2015 | 6/July/2015 | Overcast/Fair | Sastrugi | Horizontal but complex, irregular and variable surface with several bumps reliefs/Rock and ground debris | 11 | 10 | 7 |
| 16°01′57″W | |||||||||
| Sval2 | 78°09′34″N | 9/April/2015 | 8/July/2015 | Overcast | Sastrugi and snow dusting | Steep slope next to man-made road/Bare soil and rock debris | 3 | 7 | 2 |
| 16°02′04″W | |||||||||
| Green1 | 67°10′53″N | 24/April/2015 | 28/July/2015 | Fair | Fresh and smooth | Terrain ridge at edge of torrent/Rock debris and sparse low vegetation (5 to 15 cm) | 4 | 6 | 2 |
| 53°14′07″W | |||||||||
| Green2 | 67°06′56″N | 25/April/2015 | 27/July/2015 | Clear Sky | Wind packed and smooth | Steep slope/Soil and both low and thick vegetation (10 to 30 cm) | 11 | 10 | 0 |
| 53°19′19″W | |||||||||
| Green3 | 67°10′35″N | 25/April/2015 | 28/July/2015 | Clear Sky | Smooth with light snow ripples | Highly heterogeneous and variable topography reliefs/Soil, boulders, rock debris, and low vegetation (5 to 15 cm) | 10 | 9 | 2 |
| 53°14′34″W | |||||||||
| Green4 | 67°10′40″N | 26/April/2015 | 28/July/2015 | Fair/Clear Sky | Sastrugi and light snow ripples | 7 | 2 | ||
| 53°14′22″W | |||||||||
| Area Name | UAS Set-Up or Land-Based Survey | Average Flying Altitude or Shooting Distance Range (m) | Camera Settings | Acquired Images | ||||
|---|---|---|---|---|---|---|---|---|
| SDEM | TDEM | SDEM | TDEM | SDEM | TDEM | SDEM | TDEM | |
| Sval1 | Minimal set-up | Advanced set-up | 7 | 23 | 2.77 mm f/2.8 Automatic * | 18 mm | 909 | 194 |
| f/4.5 | ||||||||
| 1/3200 s | ||||||||
| 200 | ||||||||
| Sval2 | Land-based SfM with Nikon D3200 | 8 | 2–10 | 18–34 mm Variable * | 246 | 45 | ||
| Green1 | 7 | 300–350 | 92–300 mm Variable * | 873 | 153 | |||
| Green2 | Advanced set-up | 11 | 300–500 | 18 mm | 110–300 mm Variable * | 160 | 120 | |
| f/8.0 | ||||||||
| 1/3200 s | ||||||||
| 100 | ||||||||
| Green3 | 20 | 700–1500 | 18 mm | 59–300 mm Variable * | 818 | 89 | ||
| Green4 | 26 | f/18 | 709 | |||||
| 1/800 s | ||||||||
| 100 | ||||||||
| Area Name | GSD (m pixel−1) | Photoscan Reconstruction Quality (Dense) | Points Cloud Density (Points m−2) | DEMs Final Resolution (m) | Total Error (RMSE) (m) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| SDEM | TDEM | SDEM | TDEM | SDEM | TDEM | SDEM | TDEM | SDEM | TDEM | |
| Sval1 | 0.003 | 0.003 | Medium | Medium | 1337.5 | 273.6 | 0.03 | 0.06 | 0.09 | 0.057 |
| Sval2 | 0.004 | 0.003 | Medium | Medium | 801.5 | 301.1 | 0.04 | 0.09 | 0.044 | 0.054 |
| Green1 | 0.003 | 0.009 | Medium | High | 1518.5 | 163.7 | 0.04 | 0.1 | 0.057 | 0.23 |
| Green2 | 0.001 | 0.006 | Low | High | 4284.5 | 80.0 | 0.02 | 0.09 | 0.045 | 0.093 |
| Green3 | 0.003 | 0.021 | Low | High | 4413.1 | 133.2 | 0.02 | 0.09 | 0.05 | 0.086 |
| Green4 | 0.004 | Low | High | 3867.8 | 0.03 | 0.09 | 0.04 | |||
| Area Name | Area Covered (m2) | Snow Depth Map Resolution (m) | VPs | Average Difference (m) | Standard Deviation (m) | RMSE (m) |
|---|---|---|---|---|---|---|
| Sval1 | 6100 | 0.06 | 8 | 0.0379 | 0.0457 | 0.0594 |
| Sval2 | 1386 | 0.09 | 5 | 0.0156 | 0.0428 | 0.0456 |
| Green1 | 2738 | 0.1 | 4 | 0.0873 | 0.0985 | 0.1317 |
| Green2 | 2260 | 0.09 | 11 | 0.161 | 0.0928 | 0.1857 |
| Green3 | 38,410 | 0.09 | 9 | 0.038 | 0.0862 | 0.0943 |
| Green4 | 27,687 | 0.09 | 7 | 0.021 | 0.086 | 0.0887 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cimoli, E.; Marcer, M.; Vandecrux, B.; Bøggild, C.E.; Williams, G.; Simonsen, S.B. Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic. Remote Sens. 2017, 9, 1144. https://doi.org/10.3390/rs9111144
Cimoli E, Marcer M, Vandecrux B, Bøggild CE, Williams G, Simonsen SB. Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic. Remote Sensing. 2017; 9(11):1144. https://doi.org/10.3390/rs9111144
Chicago/Turabian StyleCimoli, Emiliano, Marco Marcer, Baptiste Vandecrux, Carl E. Bøggild, Guy Williams, and Sebastian B. Simonsen. 2017. "Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic" Remote Sensing 9, no. 11: 1144. https://doi.org/10.3390/rs9111144