
Automated Improvement of Geolocation Accuracy in AVHRR Data Using a Two-Step Chip Matching Approach—A Part of the TIMELINE Preprocessor

Abstract
:
1. Introduction
2. Data
3. Methods
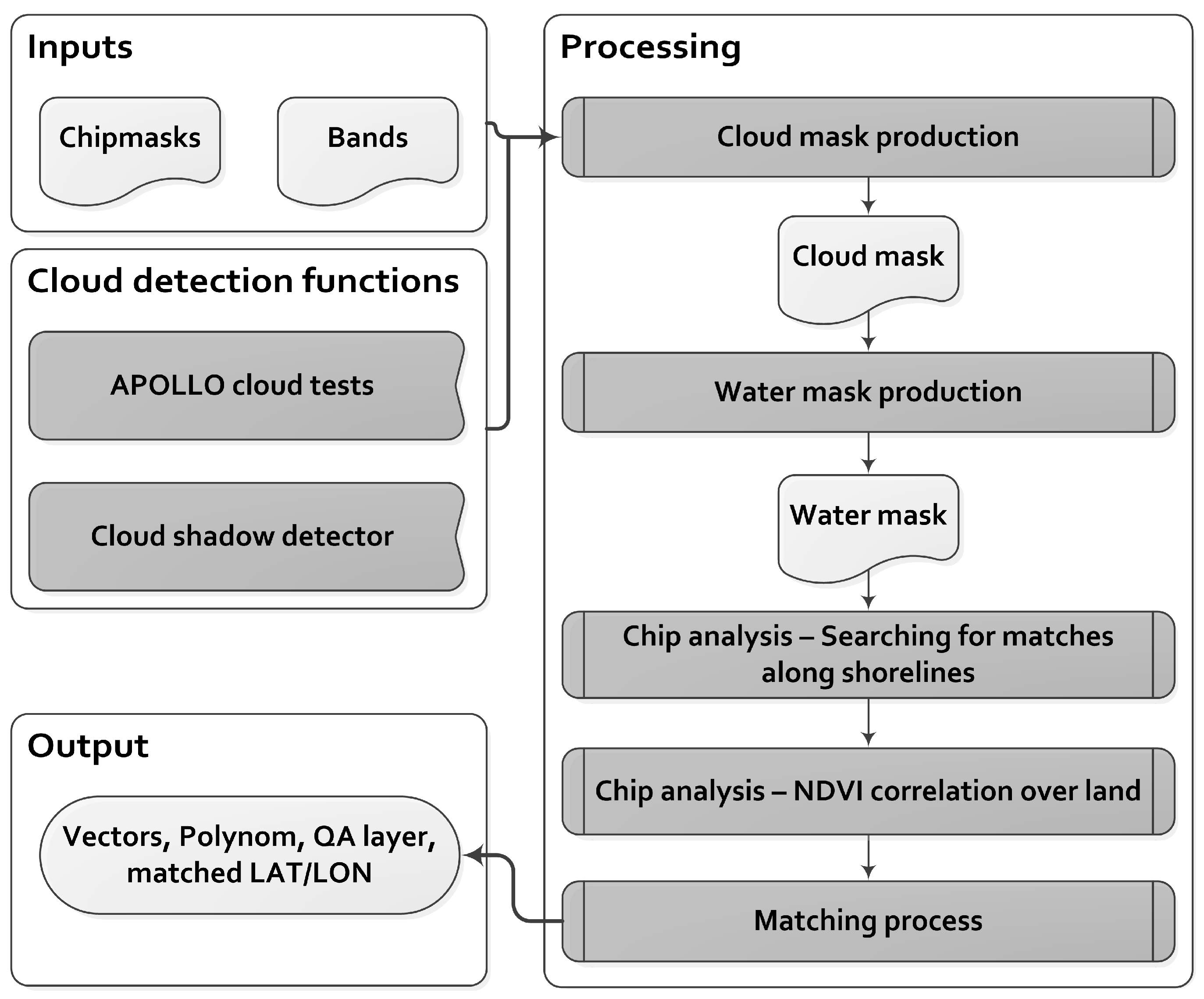
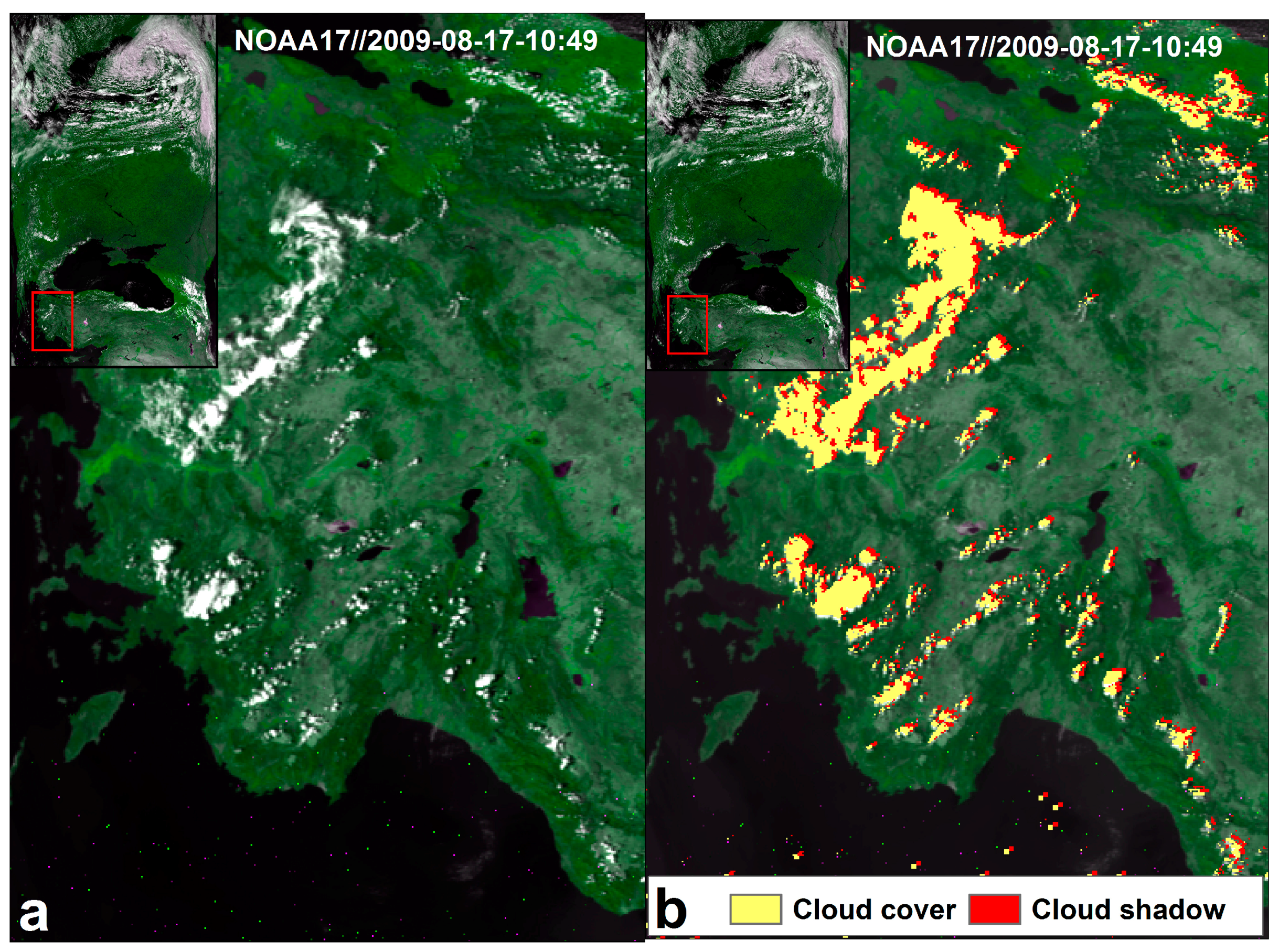
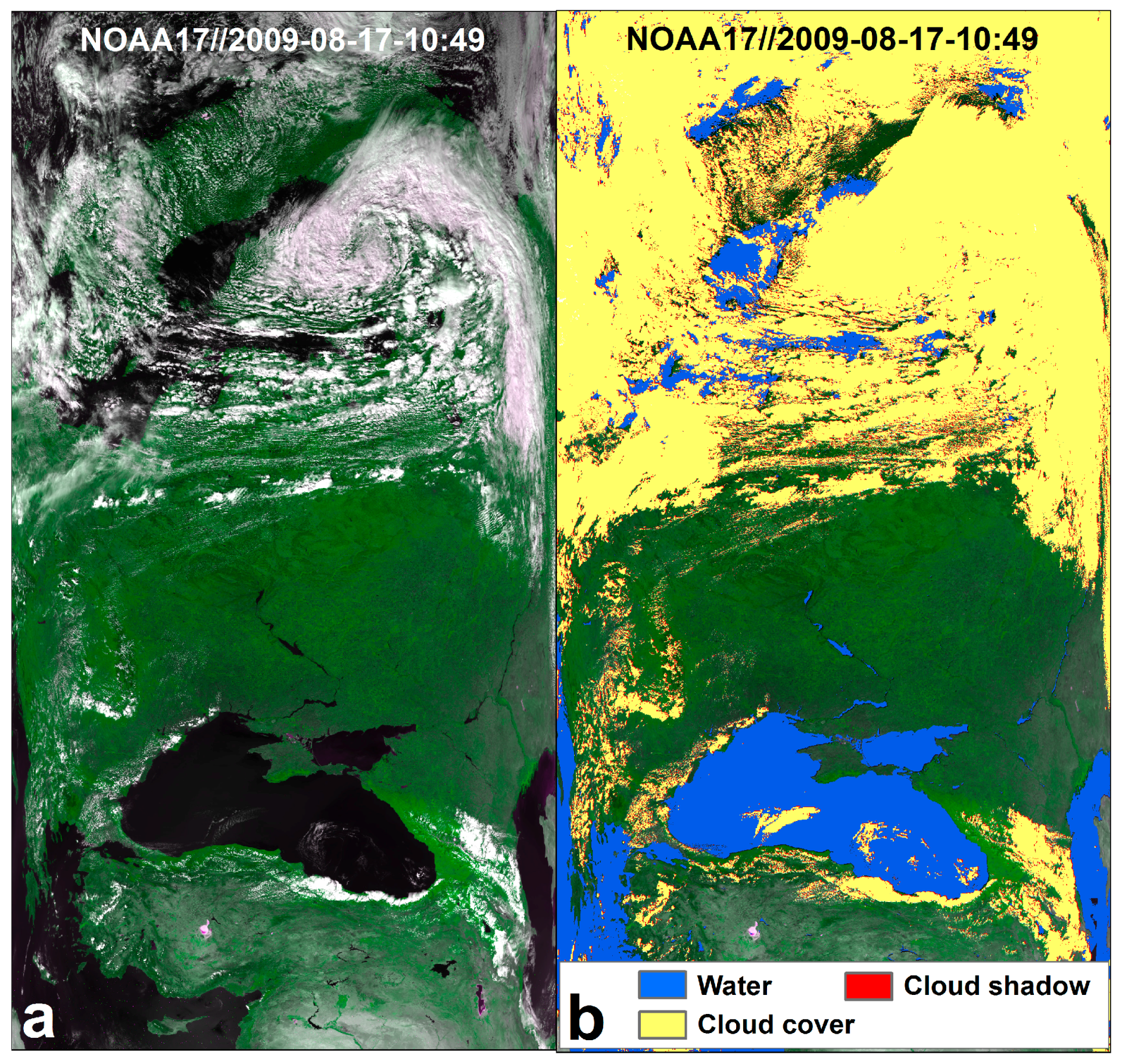
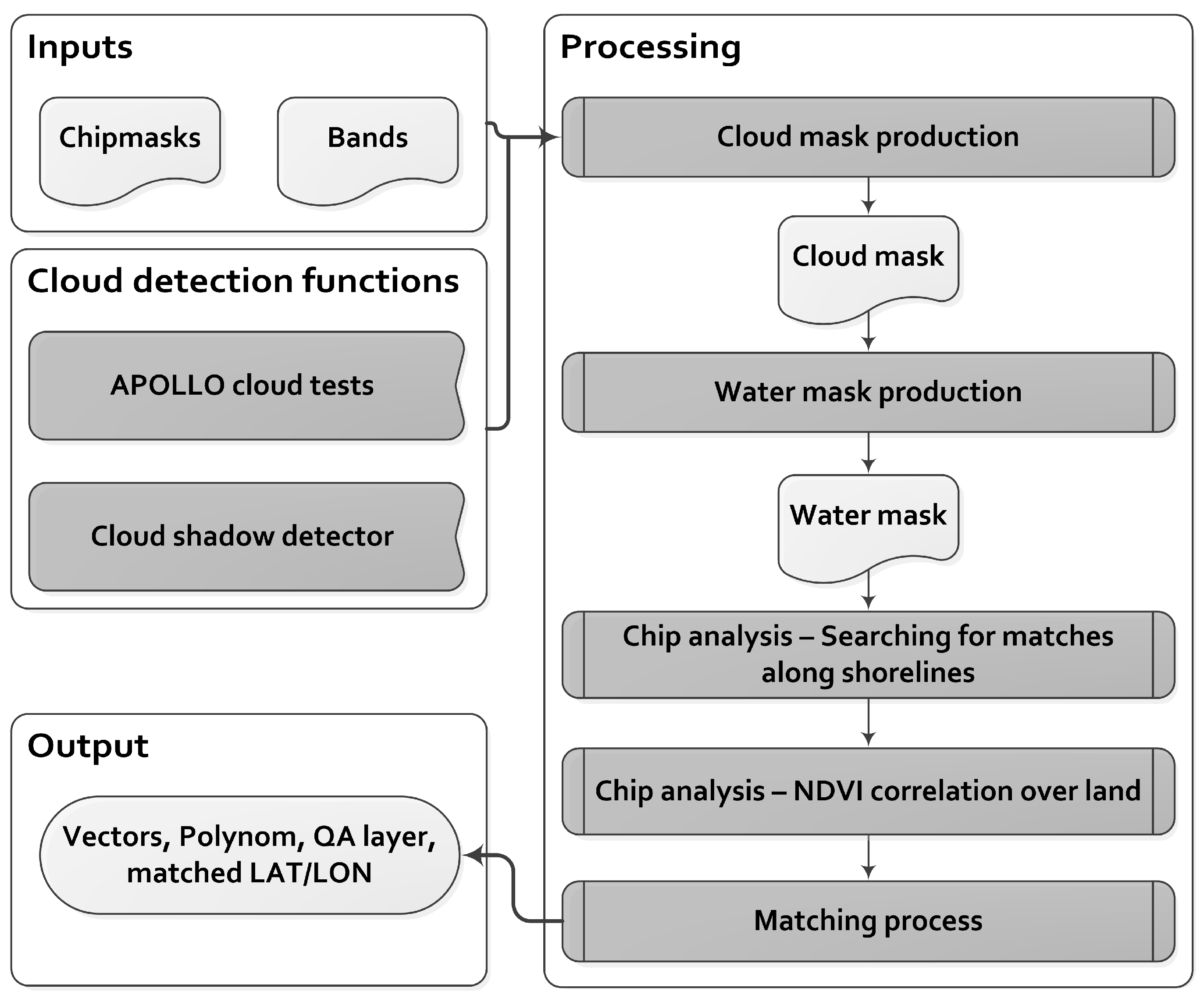
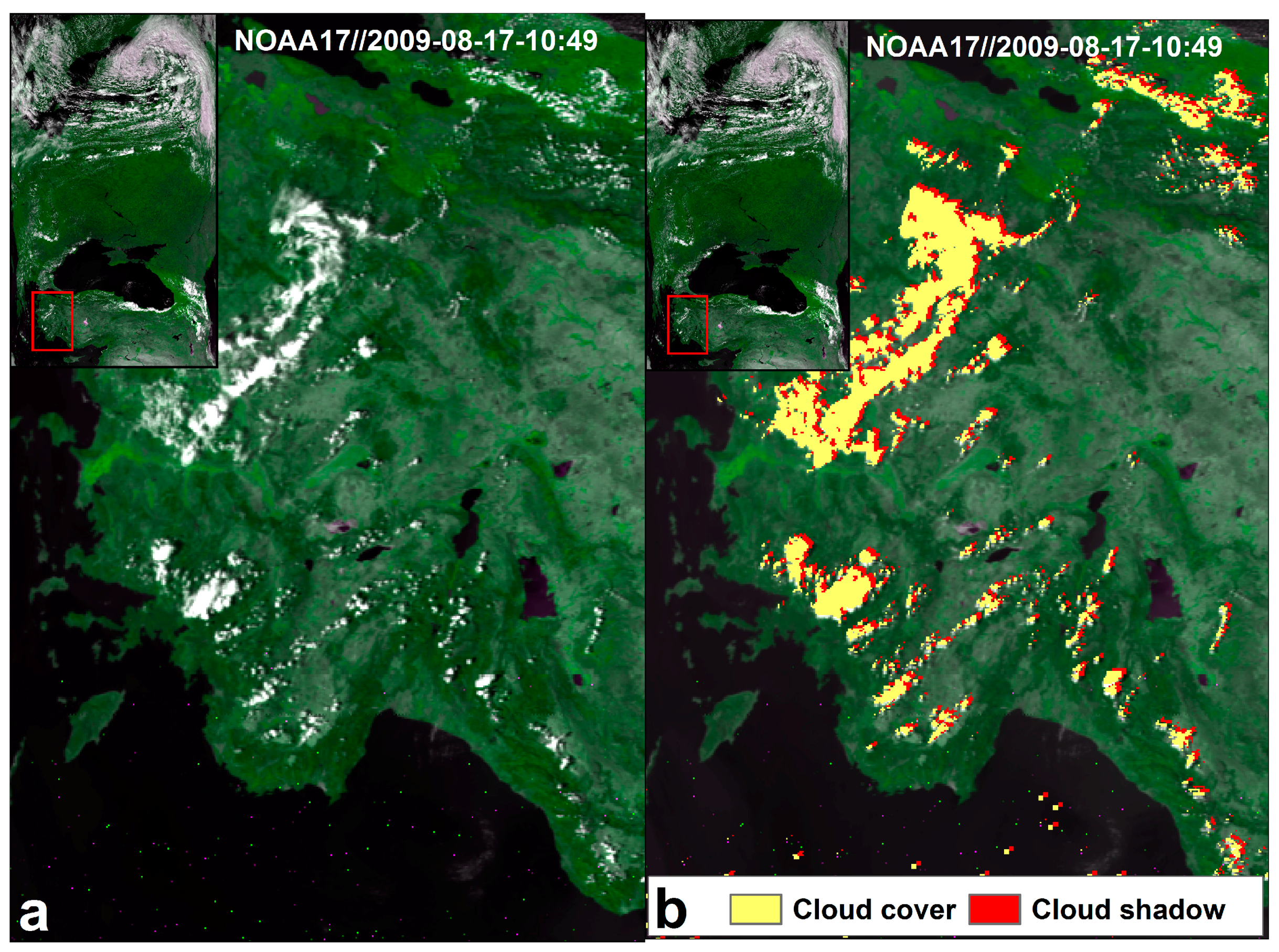
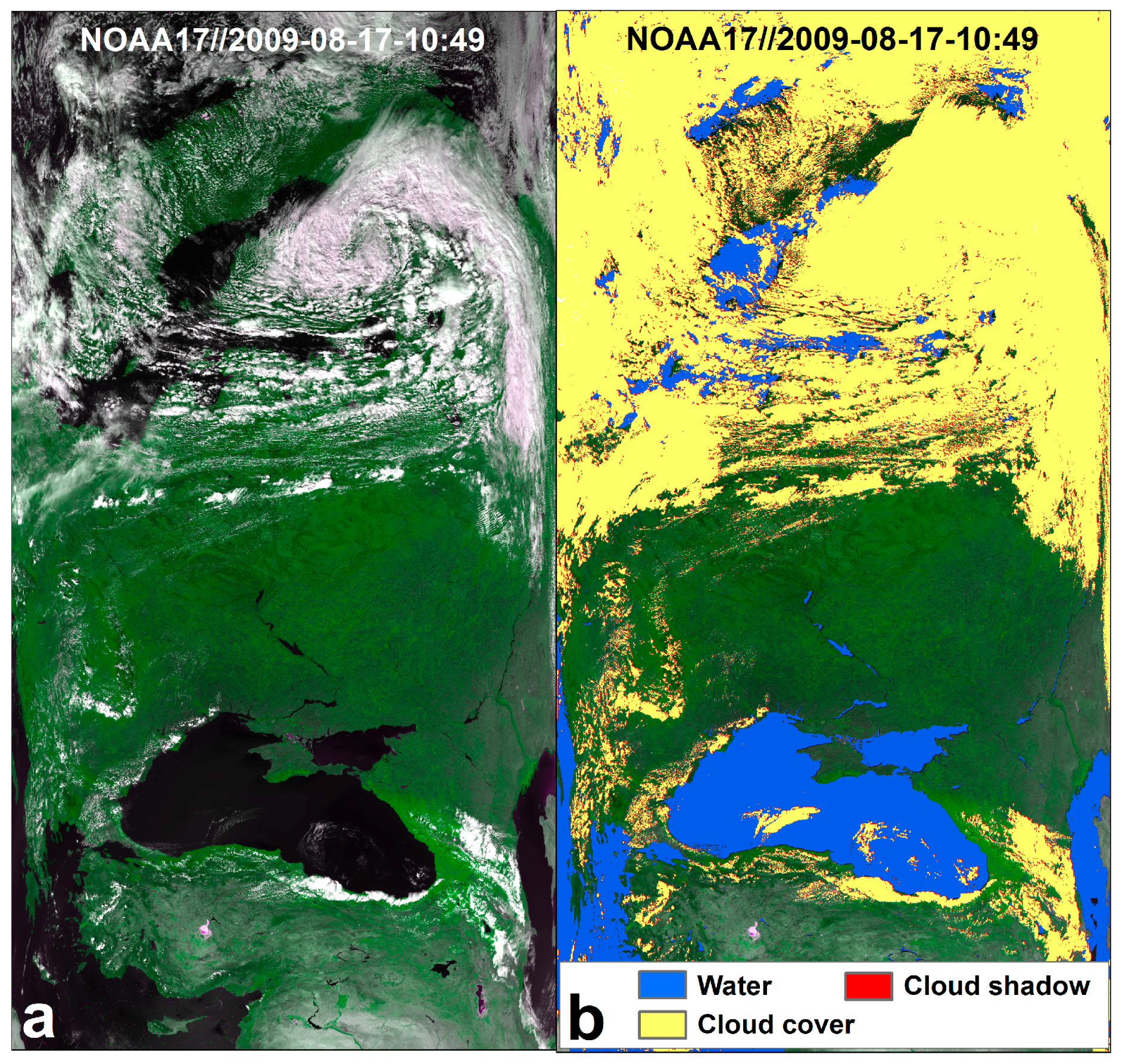
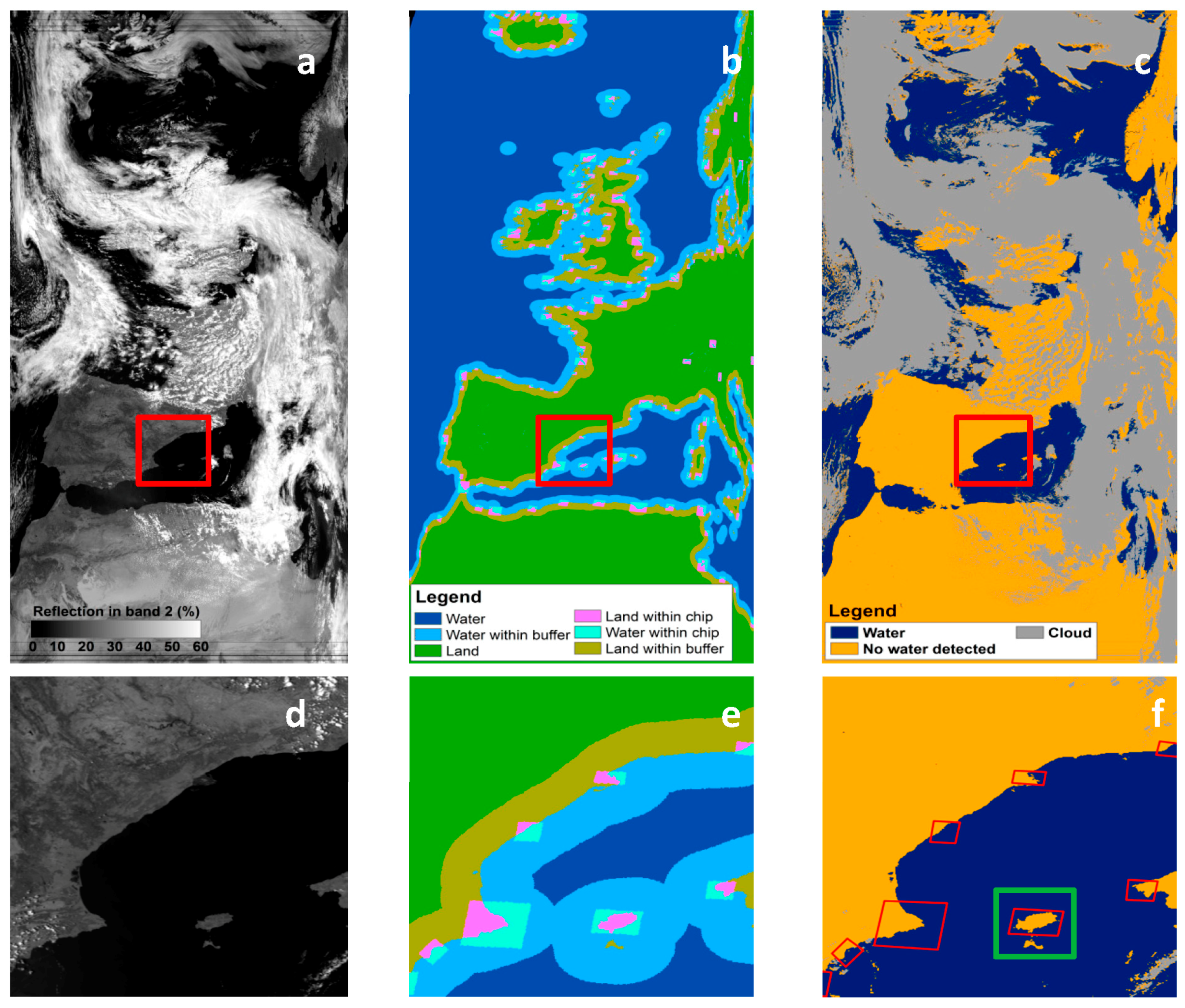
3.1. Delineation of Cloud Mask, Water Mask, and NDVI from Orbit Data
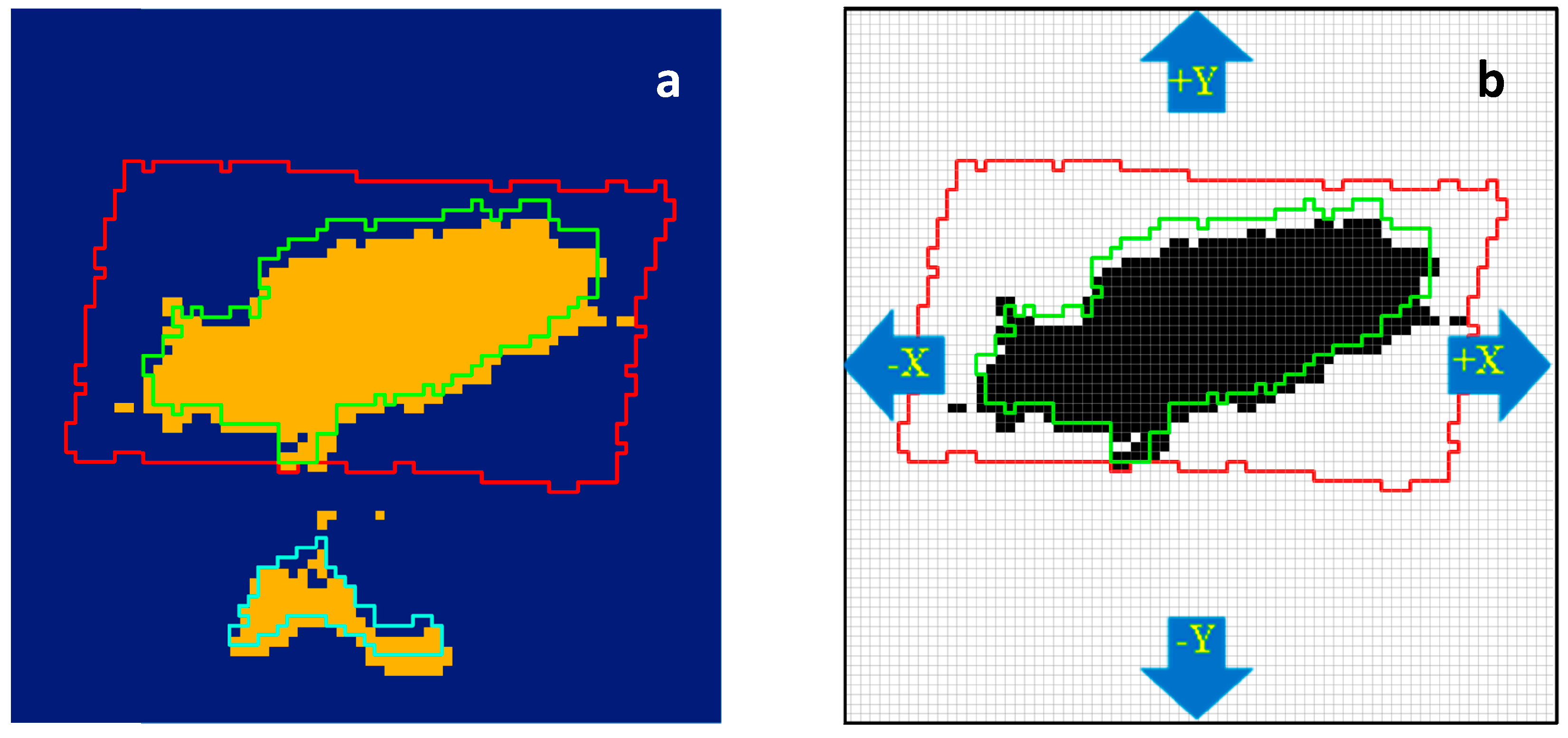
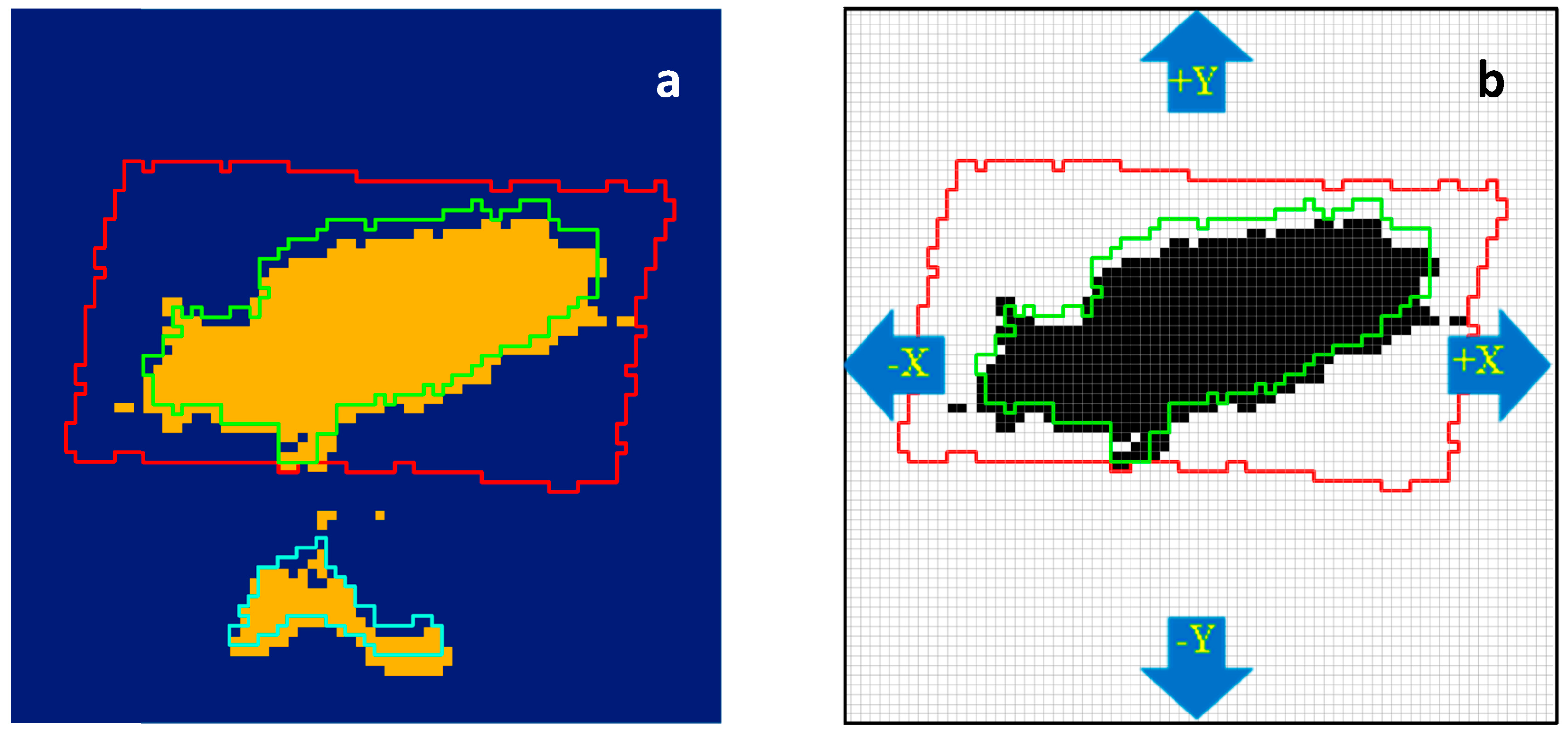
3.2. Matching Process between Orbit and Reference Data, Transformation
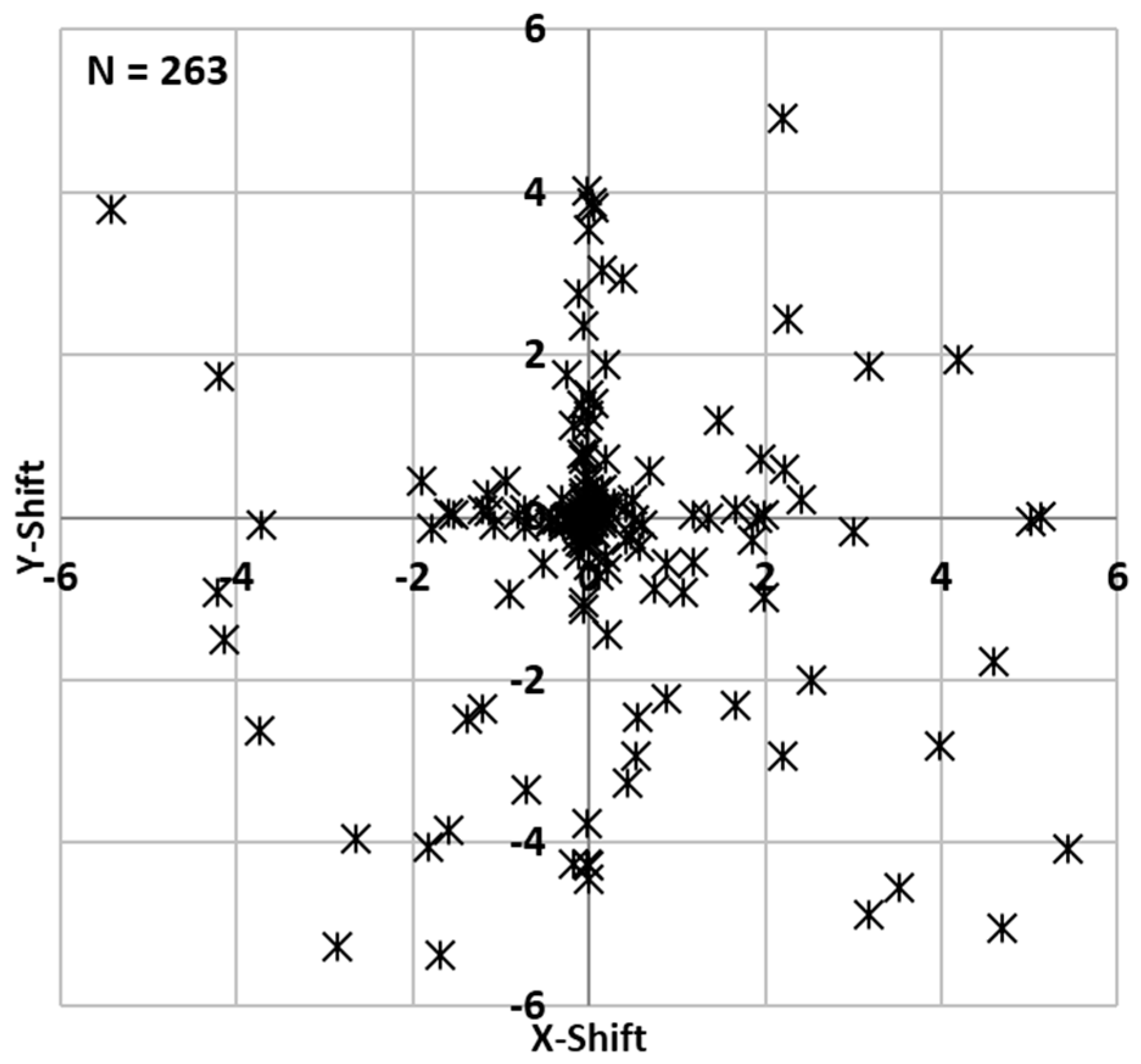
3.3. Validation
4. Results
Validation results
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- NOAA/NESDIS NOAA KLM User’s Guide with NOAA-N, -N’ Supplement. Available online: http://www.ncdc.noaa.gov/oa/pod-guide/ncdc/docs/klm/index.htm (accessed on 21 March 2017).
- Gesell, G. An algorithm for snow and ice detection using AVHRR data An extension to the APOLLO software package. Int. J. Remote Sens. 1989, 10, 897–905. [Google Scholar] [CrossRef]
- Klüser, L.; Killius, N.; Gesell, G. APOLLO_NG—A probabilistic interpretation of the APOLLO legacy for AVHRR heritage channels. Atmos. Meas. Tech. 2015, 8, 4155–4170. [Google Scholar] [CrossRef]
- Delbart, N.; Le Toan, T.; Kergoat, L.; Fedotova, V. Remote sensing of spring phenology in boreal regions: A free of snow-effect method using NOAA-AVHRR and SPOT-VGT data (1982–2004). Remote Sens. Environ. 2006, 101, 52–62. [Google Scholar] [CrossRef]
- Hill, M.J.; Donald, G.E. Estimating spatio-temporal patterns of agricultural productivity in fragmented landscapes using AVHRR NDVI time series. Remote Sens. Environ. 2003, 84, 367–384. [Google Scholar] [CrossRef]
- Dietz, A.J.; Conrad, C.; Kuenzer, C.; Gesell, G.; Dech, S. Identifying Changing Snow Cover Characteristics in Central Asia between 1986 and 2014 from Remote Sensing Data. Remote Sens. 2014, 6, 12752–12775. [Google Scholar] [CrossRef]
- Hüsler, F.; Jonas, T.; Wunderle, S.; Albrecht, S. Validation of a modified snow cover retrieval algorithm from historical 1-km AVHRR data over the European Alps. Remote Sens. Environ. 2012, 121, 497–515. [Google Scholar] [CrossRef]
- Frey, C.M.; Kuenzer, C.; Dech, S. Quantitative comparison of the operational NOAA-AVHRR LST product of DLR and the MODIS LST product V005. Int. J. Remote Sens. 2012, 33, 7165–7183. [Google Scholar] [CrossRef]
- Park, K.; Lee, E.; Li, X.; Chung, S.; Sohn, E.; Lee, E.; Li, X.; Chung, S.; Sohn, E. NOAA/AVHRR sea surface temperature accuracy in the East/Japan Sea. Int. J. Digit. Earth 2015, 8, 784–804. [Google Scholar] [CrossRef]
- EUMETSAT AVHRR Level 1b Product Guide 2011. Ref.: EUM/OPS-EPS/MAN/04/0029. Available online: http://oiswww.eumetsat.org/WEBOPS/eps-pg/AVHRR/AVHRR-PG-0TOC.htm (accessed 21 March 2017).
- Rosborough, G.W.; Baldwin, D.G.; Emery, W.J. Precise AVHRR image navigation. IEEE Trans. Geosci. Remote Sens. 1994, 32, 644–657. [Google Scholar] [CrossRef]
- Parada, M.; Millan, A.; Lobato, A.; Hermosilla, A. Fast coastal algorithm for automatic geometric correction of AVHRR images. Int. J. Remote Sens. 2000, 21, 2307–2312. [Google Scholar] [CrossRef]
- Khlopenkov, K.V.; Trishchenko, A.P. Implementation and Evaluation of Concurrent Gradient Search Method for Reprojection of MODIS Level 1B Imagery. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2016–2027. [Google Scholar] [CrossRef]
- Vogt, J.; Soille, P.; de Jager, A.; Rimaviciüté, E.; Foisneu, S.; Bódis, K.; Dusart, J.; Paracchini, M.L.; Haastrup, P.; Bamps, C. A pan-European River and Catchment Database; The European Commission: Brussels, Belgium, 2007. [Google Scholar]
- Huete, A.R.; Didan, K.; Van Leeuwen, W. MODIS Vegetation Index (MOD13) Algorithm Theoretical Basis Document. Universities of Arizona and Virginia, USA, 1999. Available online: https://modis.gsfc.nasa.gov/data/atbd/atbd_mod13.pdf (accessed on 21 March 2017).
- Khlopenkov, K.V.; Trishchenko, A.P. Achieving Subpixel Georeferencing Accuracy in the Canadian AVHRR Processing System. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2150–2161. [Google Scholar] [CrossRef]
- Saunders, R.W.; Kriebel, K.T. An improved method for detecting clear sky and cloudy radiances from AVHRR data. Int. J. Remote Sens. 1988, 9, 123–150. [Google Scholar] [CrossRef]
- Kriebel, K.T.; Gesell, G.; Kästner, M.; Mannstein, H. The cloud analysis tool APOLLO: Improvements and validations. Int. J. Remote Sens. 2003, 24, 2389–2408. [Google Scholar] [CrossRef]
- Tungalagsaikhan, P.; Günther, K.P.; Gesell, G.; Dech, S.W.; Ruppert, T. Operational processing of AVHRR data at DFD. In Publikationen der Deutschen Gesellschaft für Photogrammetrie, Fernerkundung und Geoinformation; Technische Jahrestagung der DGPF: Bochum, Germany, 2003; pp. 435–449. [Google Scholar]
- Wang, P.; Stammes, P. Evaluation of SCIAMACHY Oxygen A band cloud heights using Cloudnet measurements. Atmos. Meas. Tech. 2014, 7, 1331–1350. [Google Scholar] [CrossRef]
- Simpson, J.J.; Mcintire, T.; Jin, Z.; Stitt, J.R. Improved Cloud Top Height Retrieval under Arbitrary Viewing and Illumination Conditions Using AVHRR Data. Remote Sens. Environ. 2000, 72, 95–110. [Google Scholar] [CrossRef]
- Simpson, J.J.; Stitt, J.R. A procedure for the detection and removal of cloud shadow from AVHRR data over land. IEEE Trans. Geosci. Remote Sens. 1998, 36, 880–897. [Google Scholar] [CrossRef]
- Fichtelmann, B.; Borg, E. A New Self-Learning Algorithm for Dynamic Classification of Water Bodies. In Computational Science an Its Applications—ICCSA 2012, Part III; Murgante, B., Gervasi, O., Misra, S., Nedjah, N., Rocha, A.M.A.C., Taniar, D., Apduhan, B.O., Eds.; Springer: Salvador de Bahia, Brazil, 2012; pp. 457–470. [Google Scholar]
- Klein, I.; Dietz, A.; Gessner, U.; Dech, S.; Kuenzer, C. Results of the Global WaterPack: A novel product to assess inland water body dynamics on a daily basis. Remote Sens. Lett. 2015, 6, 78–87. [Google Scholar] [CrossRef]
- Dietz, A.J.; Klein, I.; Gessner, U.; Frey, C.M.; Kuenzer, C.; Dech, S. Detection of Water Bodies from AVHRR Data—A TIMELINE Thematic Processor. Remote Sens. 2017, 9, 1–15. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Zheng, G. Lake-area mapping in the Tibetan Plateau: An evaluation of data and methods. Int. J. Remote Sens. 2017, 38, 742–772. [Google Scholar] [CrossRef]
- Neteler, M.; Mitasova, H. Open Source GIS: A GRASS GIS Approach, 2nd ed.; Kluwer Academic Publshers/Springer: Boston, MA, USA, 2004. [Google Scholar]
- Meerkötter, R.; König, C.; Bissolli, P.; Gesell, G.; Mannstein, H. A 14-year European Cloud Climatology from NOAA/AVHRR data in comparison to surface observations. Geophys. Res. Lett. 2004, 31, 14–17. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Wavelength (µm) | Typical Use | Generation/Platforms |
|---|---|---|---|
| 1 | 0.58–0.68 (VIS) | Cloud mapping, vegetation and surface characterization [2,3] | 1,2,3/TIROS-N, NOAA-6–NOAA-19, MetOp-A and -B |
| 2 | 0.72–1.00 (NIR) | Vegetation mapping, water body detection [4,5] | 1,2,3/TIROS-N, NOAA-6–NOAA-19, MetOp-A and -B |
| 3A 1 | 1.58–1.64 (MIR) | Snow and Ice classification [6,7] | 3 / NOAA-15–NOAA-19, MetOp-A and -B |
| 3B 1 | 3.55–3.93 (MIR) | (Night) Cloud detection, Sea Surface Temperature (SST), Land Surface Temperature (LST) [8,9] | 1,2,3/TIROS-N, NOAA-6–NOAA-19, MetOp-A and -B |
| 4 | 10.30–11.30 (TIR) | (Night) Cloud detection, SST, LST | 1,2,3/TIROS-N, NOAA-6–NOAA-19, MetOp-A and -B |
| 5 | 11.50–12.50 (TIR) | (Night) cloud detection, SST, LST | 2,3/NOAA-7, NOAA-9, NOAA-11–NOAA-19, MetOp-A and -B |
| Cloud Cover Percent (Mean, Max, Min) | StdDev. X-Coefficients | StdDev. Y-Coefficients | Percent Daytime (Mean) | |
|---|---|---|---|---|
| Matched | (54.5; 81.5; 22.2) | 97.9 | ||
| No Match | (65.6; 97.6; 22.1) | Not applicable | Not applicable | 92.1 |
| Mean | Max. | Min. | StdDev. | |
|---|---|---|---|---|
| Wrong pixels within buffer zone around shorelines (%) | 4.18 | 5.24 | 3.40 | 2.02 |
| Improvement after applying chip matching (% of wrong pixels) | 42.82 | 84.54 | 13.55 | 12.23 |
| No Match | Successful Match | |
|---|---|---|
| Number of tested scenes | 337 | 263 |
| Mean percent cloud cover | 65.6 | 54.5 |
| Mean percent of dislocated pixels before (no match) and after (successful match) matching | 4.18 (~1.6 km) | 2.39 (~0.9 km) |
| Number of performed simulations for the validation | 861 | 459 |
| Overall percent of chip matching (success rate in case of “successful match”, fail rate in case of “no match”) | 46.5 (cloud cover too high) 9.5 (high initial accuracy) | 44 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dietz, A.J.; Frey, C.M.; Ruppert, T.; Bachmann, M.; Kuenzer, C.; Dech, S. Automated Improvement of Geolocation Accuracy in AVHRR Data Using a Two-Step Chip Matching Approach—A Part of the TIMELINE Preprocessor. Remote Sens. 2017, 9, 303. https://doi.org/10.3390/rs9040303
Dietz AJ, Frey CM, Ruppert T, Bachmann M, Kuenzer C, Dech S. Automated Improvement of Geolocation Accuracy in AVHRR Data Using a Two-Step Chip Matching Approach—A Part of the TIMELINE Preprocessor. Remote Sensing. 2017; 9(4):303. https://doi.org/10.3390/rs9040303
Chicago/Turabian StyleDietz, Andreas J., Corinne M. Frey, Thomas Ruppert, Martin Bachmann, Claudia Kuenzer, and Stefan Dech. 2017. "Automated Improvement of Geolocation Accuracy in AVHRR Data Using a Two-Step Chip Matching Approach—A Part of the TIMELINE Preprocessor" Remote Sensing 9, no. 4: 303. https://doi.org/10.3390/rs9040303