Appendix A
Table A1.
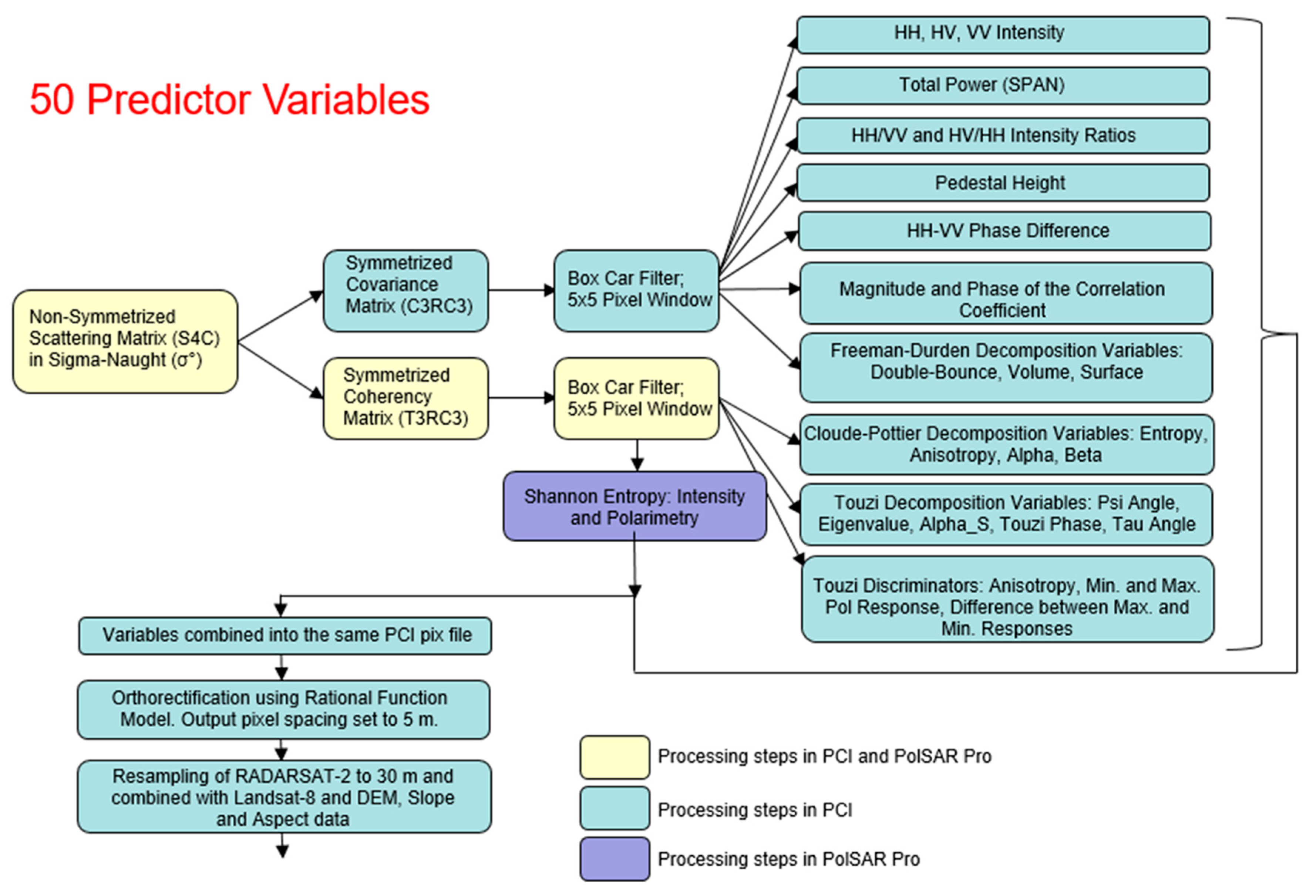
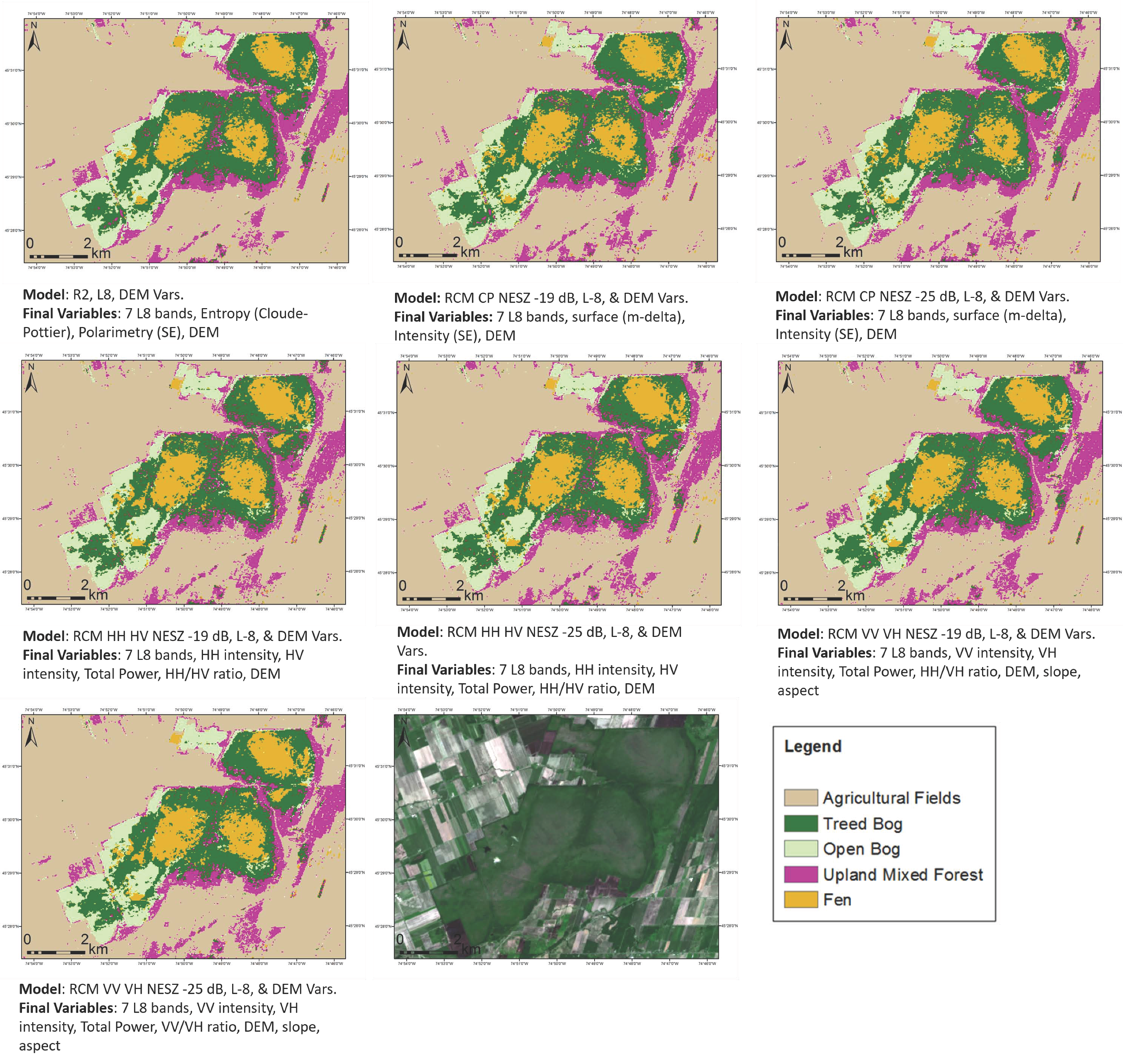
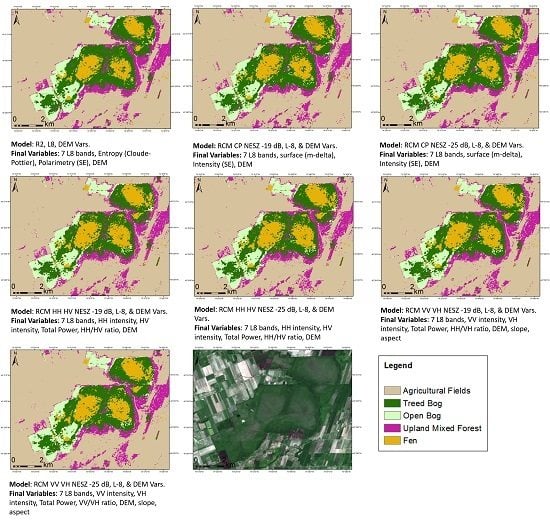
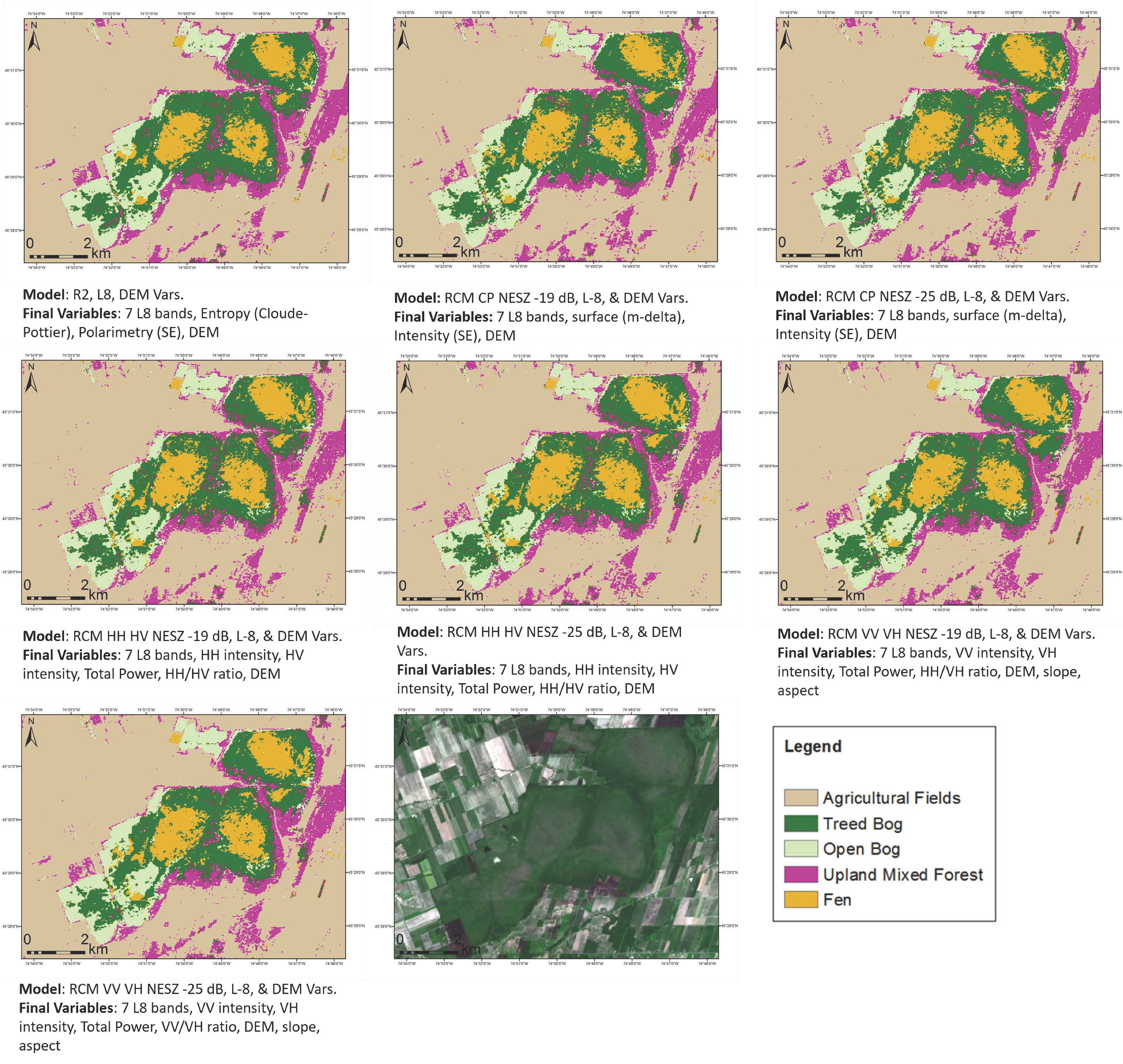
Statistical results from the RADARSAT-2 (2 May 2014), Landsat-8 (24 April 2014), and Shuttle Radar Topographic Mission (SRTM) variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, Entropy from Claude–Pottier, SRTM DEM, and the polarimetry from the Shannon Entropy.
Table A1.
Statistical results from the RADARSAT-2 (2 May 2014), Landsat-8 (24 April 2014), and Shuttle Radar Topographic Mission (SRTM) variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, Entropy from Claude–Pottier, SRTM DEM, and the polarimetry from the Shannon Entropy.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 50 | 78 | 83 | 0.78 | 95 | 93 | 68 | 84 | 94 | 70 | 63 | 83 | 90 | 77 |
| 45 | 78 | 83 | 0.78 | 96 | 93 | 68 | 83 | 92 | 71 | 64 | 83 | 91 | 78 |
| 40 | 78 | 83 | 0.78 | 95 | 92 | 68 | 84 | 92 | 71 | 63 | 82 | 91 | 76 |
| 35 | 79 | 82 | 0.77 | 95 | 92 | 65 | 82 | 91 | 72 | 63 | 82 | 91 | 72 |
| 30 | 80 | 82 | 0.77 | 94 | 94 | 65 | 83 | 90 | 73 | 65 | 78 | 91 | 71 |
| 25 | 79 | 84 | 0.79 | 94 | 95 | 68 | 84 | 92 | 76 | 68 | 78 | 92 | 74 |
| 20 | 80 | 84 | 0.80 | 94 | 93 | 68 | 89 | 94 | 77 | 69 | 78 | 89 | 74 |
| 15 | 80 | 85 | 0.81 | 94 | 93 | 69 | 90 | 91 | 78 | 70 | 81 | 86 | 74 |
| 12 | 79 | 86 | 0.82 | 94 | 92 | 74 | 93 | 97 | 80 | 69 | 78 | 88 | 78 |
| 11 | 79 | 85 | 0.81 | 93 | 92 | 72 | 93 | 96 | 82 | 71 | 75 | 88 | 74 |
| 10 | 80 | 88 | 0.84 | 96 | 94 | 74 | 92 | 94 | 84 | 78 | 82 | 90 | 78 |
| 9 | 77 | 87 | 0.82 | 92 | 93 | 75 | 93 | 94 | 83 | 75 | 74 | 92 | 78 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RADARSAT & SRTM variables | 59 | 55 | 0.41 | 65 | 75 | 37 | 64 | 80 | 37 | 46 | 64 | 95 | 12 |
| Landsat only | 78 | 79 | 0.73 | 87 | 88 | 67 | 82 | 93 | 75 | 58 | 61 | 81 | 74 |
| RADARSAT only | 49 | 44 | 0.29 | 58 | 51 | 27 | 60 | 69 | 25 | 47 | 79 | 36 | 4 |
Table A2.
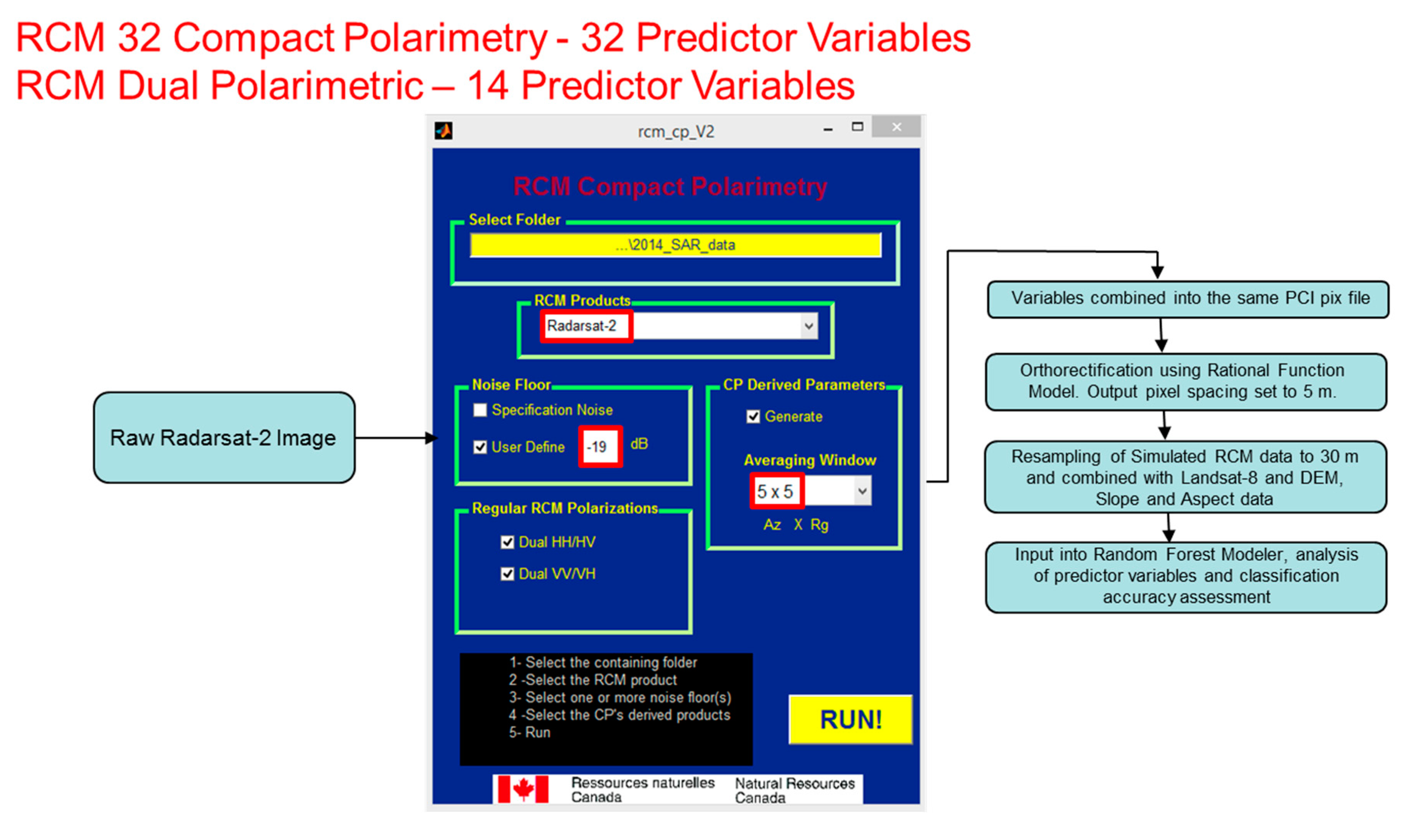
Statistical results from the RCM CP NESZ −19 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, m-delta surface, Intensity from Shannon Entropy, and SRTM DEM.
Table A2.
Statistical results from the RCM CP NESZ −19 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, m-delta surface, Intensity from Shannon Entropy, and SRTM DEM.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 32 | 78 | 80 | 0.74 | 90 | 90 | 65 | 79 | 89 | 71 | 60 | 75 | 88 | 74 |
| 27 | 78 | 80 | 0.74 | 87 | 92 | 69 | 79 | 90 | 75 | 59 | 64 | 86 | 74 |
| 22 | 79 | 79 | 0.73 | 88 | 91 | 66 | 79 | 89 | 74 | 58 | 66 | 89 | 74 |
| 17 | 79 | 80 | 0.73 | 88 | 90 | 69 | 76 | 90 | 75 | 55 | 68 | 89 | 77 |
| 12 | 80 | 82 | 0.76 | 91 | 92 | 68 | 79 | 92 | 77 | 61 | 70 | 86 | 78 |
| 11 | 80 | 83 | 0.78 | 90 | 93 | 69 | 79 | 94 | 81 | 66 | 70 | 86 | 78 |
| 10 | 80 | 84 | 0.79 | 90 | 93 | 70 | 83 | 94 | 81 | 70 | 70 | 86 | 78 |
| 9 | 80 | 83 | 0.78 | 90 | 93 | 68 | 85 | 97 | 78 | 67 | 70 | 85 | 74 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RCM CP & SRTM variables | 60 | 57 | 0.43 | 68 | 73 | 38 | 51 | 66 | 43 | 46 | 71 | 68 | 28 |
| Landsat only | 78 | 79 | 0.73 | 90 | 74 | 88 | 60 | 64 | 67 | 82 | 91 | 85 | 74 |
| RCM CP only | 49 | 39 | 0.23 | 50 | 39 | 23 | 40 | 61 | 39 | 40 | 66 | 25 | 14 |
Table A3.
Statistical results from the RCM CP NESZ −25 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, m-delta surface, Intensity from Shannon Entropy, and SRTM DEM.
Table A3.
Statistical results from the RCM CP NESZ −25 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, m-delta surface, Intensity from Shannon Entropy, and SRTM DEM.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 32 | 78 | 81 | 0.75 | 91 | 91 | 66 | 81 | 91 | 71 | 64 | 89 | 80 | 73 |
| 27 | 79 | 81 | 0.75 | 89 | 92 | 69 | 81 | 92 | 71 | 63 | 85 | 74 | 73 |
| 22 | 79 | 80 | 0.74 | 89 | 91 | 68 | 79 | 93 | 71 | 60 | 85 | 74 | 74 |
| 17 | 80 | 81 | 0.75 | 87 | 90 | 68 | 81 | 93 | 76 | 62 | 89 | 70 | 74 |
| 12 | 82 | 82 | 0.77 | 90 | 91 | 69 | 82 | 93 | 78 | 66 | 86 | 74 | 77 |
| 11 | 79 | 84 | 0.79 | 90 | 92 | 69 | 82 | 94 | 80 | 71 | 87 | 73 | 78 |
| 10 | 80 | 84 | 0.80 | 92 | 92 | 69 | 82 | 94 | 81 | 73 | 86 | 79 | 78 |
| 9 | 79 | 84 | 0.79 | 91 | 93 | 67 | 84 | 97 | 79 | 75 | 85 | 78 | 74 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RCM CP & SRTM variables | 58 | 56 | 0.43 | 69 | 77 | 36 | 56 | 76 | 34 | 48 | 60 | 74 | 20 |
| Landsat only | 78 | 79 | 0.73 | 90 | 74 | 88 | 60 | 64 | 67 | 82 | 91 | 85 | 74 |
| RCM CP only | 49 | 38 | 0.21 | 53 | 39 | 21 | 43 | 55 | 26 | 38 | 33 | 69 | 13 |
Table A4.
Statistical results from the RCM Dual Pol HH+HV NESZ −19 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (12 variables) in order of decreasing importance were the seven Landsat-8 bands, HH Intensity, HV Intensity, Total Power, HH/HV ratio, and SRTM DEM.
Table A4.
Statistical results from the RCM Dual Pol HH+HV NESZ −19 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (12 variables) in order of decreasing importance were the seven Landsat-8 bands, HH Intensity, HV Intensity, Total Power, HH/HV ratio, and SRTM DEM.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 80 | 83 | 0.78 | 89 | 95 | 71 | 82 | 95 | 80 | 68 | 63 | 81 | 77 |
| 13 | 82 | 83 | 0.78 | 90 | 95 | 69 | 82 | 94 | 80 | 71 | 65 | 81 | 76 |
| 12 | 80 | 84 | 0.79 | 91 | 94 | 69 | 82 | 95 | 80 | 68 | 70 | 84 | 77 |
| 11 | 80 | 83 | 0.77 | 89 | 92 | 70 | 82 | 97 | 80 | 68 | 70 | 80 | 77 |
| 10 | 80 | 82 | 0.77 | 90 | 91 | 70 | 83 | 95 | 78 | 66 | 68 | 79 | 78 |
| 9 | 79 | 83 | 0.78 | 90 | 90 | 74 | 83 | 97 | 83 | 64 | 71 | 81 | 78 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RCM HH+HV & SRTM variables | 56 | 55 | 0.41 | 67 | 37 | 64 | 50 | 55 | 73 | 60 | 42 | 58 | 24 |
| Landsat only | 78 | 79 | 0.73 | 90 | 74 | 88 | 60 | 64 | 67 | 82 | 91 | 85 | 74 |
| RCM HH+HV only | 42 | 42 | 0.25 | 54 | 53 | 31 | 49 | 52 | 27 | 41 | 60 | 15 | 9 |
Table A5.
Statistical results from the RCM Dual Pol HH+HV NESZ −25 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (13 variables) in order of decreasing importance were the seven Landsat-8 bands, HH Intensity, HV Intensity, Total Power, HH/HV ratio, SRTM DEM, and SRTM slope.
Table A5.
Statistical results from the RCM Dual Pol HH+HV NESZ −25 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (13 variables) in order of decreasing importance were the seven Landsat-8 bands, HH Intensity, HV Intensity, Total Power, HH/HV ratio, SRTM DEM, and SRTM slope.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 80 | 84 | 0.78 | 90 | 96 | 71 | 82 | 95 | 81 | 70 | 64 | 83 | 77 |
| 13 | 80 | 84 | 0.79 | 90 | 96 | 69 | 82 | 94 | 81 | 71 | 64 | 84 | 77 |
| 12 | 80 | 84 | 0.79 | 91 | 94 | 69 | 82 | 94 | 81 | 69 | 70 | 85 | 77 |
| 11 | 80 | 83 | 0.77 | 90 | 92 | 69 | 83 | 97 | 79 | 68 | 70 | 80 | 76 |
| 10 | 80 | 82 | 0.77 | 91 | 91 | 69 | 82 | 95 | 78 | 66 | 70 | 78 | 77 |
| 9 | 80 | 83 | 0.78 | 89 | 90 | 74 | 82 | 97 | 83 | 64 | 70 | 82 | 77 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RCM HH+HV & SRTM variables | 56 | 55 | 0.41 | 67 | 73 | 37 | 58 | 63 | 42 | 49 | 57 | 60 | 26 |
| Landsat only | 78 | 79 | 0.73 | 90 | 88 | 64 | 82 | 91 | 74 | 60 | 67 | 85 | 74 |
| RCM HH+HV only | 41 | 42 | 0.24 | 54 | 54 | 29 | 45 | 47 | 28 | 38 | 55 | 24 | 12 |
Table A6.
Statistical results from the RCM Dual Pol VV+VH NESZ −19 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (14 variables) in order of decreasing importance were the seven Landsat-8 bands, VV Intensity, HV Intensity, Total Power, VV/HV ratio, SRTM DEM, SRTM slope, and SRTM aspect.
Table A6.
Statistical results from the RCM Dual Pol VV+VH NESZ −19 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (14 variables) in order of decreasing importance were the seven Landsat-8 bands, VV Intensity, HV Intensity, Total Power, VV/HV ratio, SRTM DEM, SRTM slope, and SRTM aspect.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 78 | 85 | 0.80 | 89 | 91 | 77 | 86 | 97 | 88 | 64 | 67 | 88 | 78 |
| 13 | 78 | 85 | 0.80 | 89 | 93 | 75 | 86 | 97 | 86 | 65 | 67 | 89 | 78 |
| 12 | 78 | 84 | 0.80 | 89 | 91 | 75 | 86 | 97 | 86 | 67 | 70 | 89 | 77 |
| 11 | 79 | 83 | 0.78 | 87 | 90 | 73 | 86 | 97 | 84 | 67 | 67 | 86 | 77 |
| 10 | 79 | 83 | 0.78 | 87 | 90 | 73 | 85 | 97 | 83 | 69 | 70 | 84 | 77 |
| 9 | 80 | 84 | 0.79 | 89 | 90 | 75 | 82 | 97 | 84 | 69 | 77 | 82 | 78 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RCM VV HV & SRTM variables | 56 | 60 | 0.48 | 68 | 71 | 48 | 68 | 67 | 47 | 49 | 50 | 60 | 51 |
| Landsat only | 78 | 79 | 0.73 | 90 | 88 | 64 | 82 | 91 | 74 | 60 | 67 | 85 | 74 |
| RCM VV HV only | 40 | 36 | 0.17 | 49 | 50 | 22 | 45 | 40 | 14 | 29 | 35 | 45 | 22 |
Table A7.
Statistical results from the RCM Dual Pol VV+VH NESZ −25 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (14 variables) in order of decreasing importance were the seven Landsat-8 bands, VV Intensity, HV Intensity, Total Power, VV/HV ratio, SRTM DEM, SRTM slope, and SRTM aspect.
Table A7.
Statistical results from the RCM Dual Pol VV+VH NESZ −25 dB (2 May 2014), Landsat-8 (24 April 2014), and SRTM variables spring model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (14 variables) in order of decreasing importance were the seven Landsat-8 bands, VV Intensity, HV Intensity, Total Power, VV/HV ratio, SRTM DEM, SRTM slope, and SRTM aspect.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 78 | 85 | 0.80 | 90 | 92 | 76 | 86 | 97 | 88 | 64 | 69 | 88 | 78 |
| 13 | 79 | 85 | 0.80 | 90 | 92 | 75 | 86 | 97 | 86 | 65 | 68 | 88 | 78 |
| 12 | 78 | 85 | 0.80 | 89 | 92 | 74 | 86 | 97 | 86 | 67 | 70 | 89 | 77 |
| 11 | 79 | 84 | 0.79 | 87 | 90 | 74 | 86 | 97 | 85 | 68 | 68 | 86 | 78 |
| 10 | 79 | 83 | 0.78 | 87 | 90 | 74 | 85 | 97 | 84 | 68 | 69 | 83 | 78 |
| 9 | 80 | 84 | 0.79 | 89 | 90 | 74 | 82 | 97 | 84 | 70 | 78 | 82 | 77 |
| Landsat & SRTM variables | 80 | 82 | 0.76 | 84 | 90 | 69 | 85 | 97 | 79 | 72 | 69 | 86 | 74 |
| RCM VV HV & SRTM variables | 56 | 60 | 0.48 | 67 | 72 | 48 | 68 | 67 | 46 | 50 | 51 | 63 | 52 |
| Landsat only | 78 | 79 | 0.73 | 90 | 88 | 64 | 82 | 91 | 74 | 60 | 67 | 85 | 74 |
| RCM VV HV only | 40 | 37 | 0.19 | 52 | 49 | 22 | 45 | 41 | 15 | 30 | 39 | 54 | 30 |
Table A8.
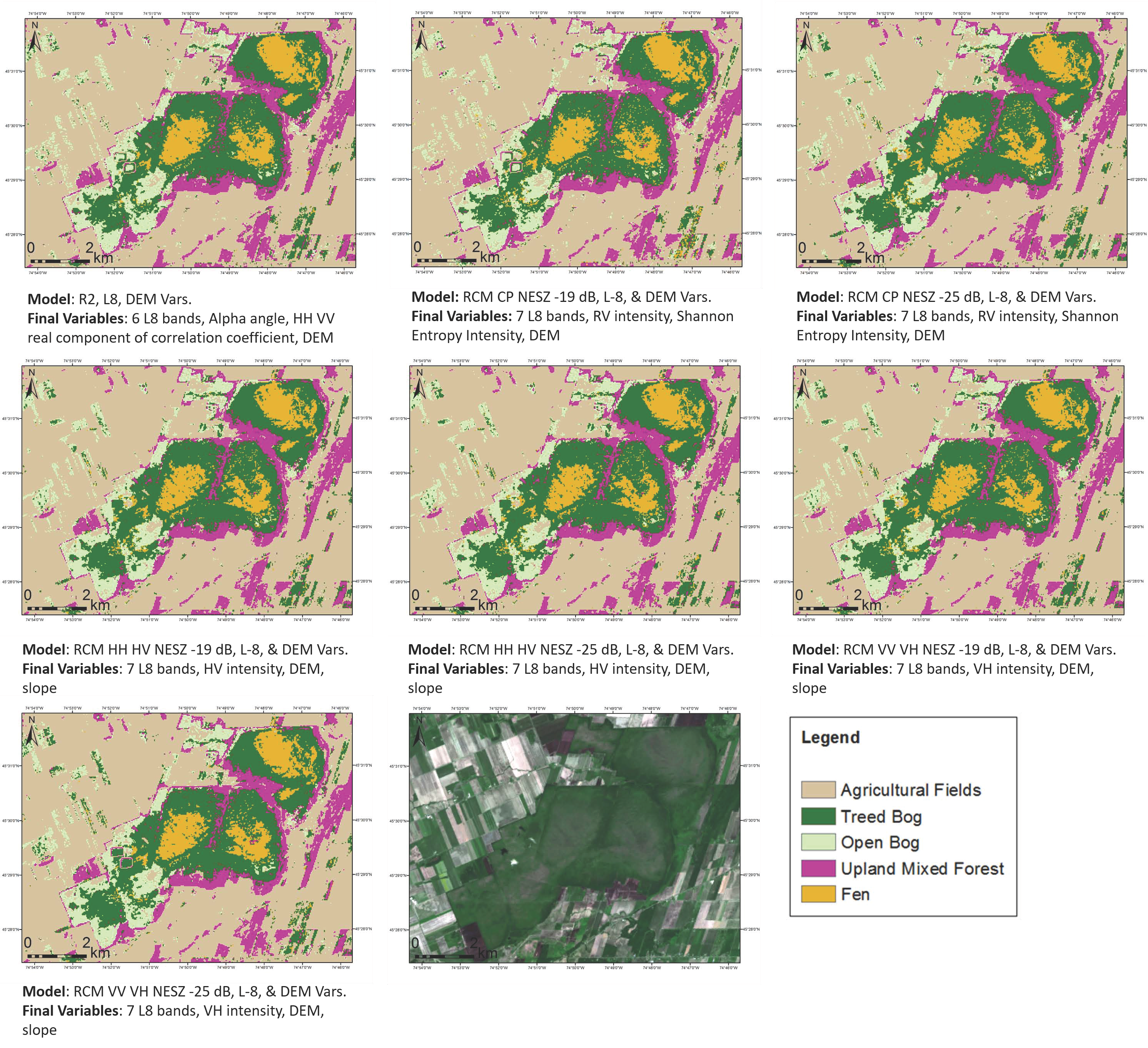
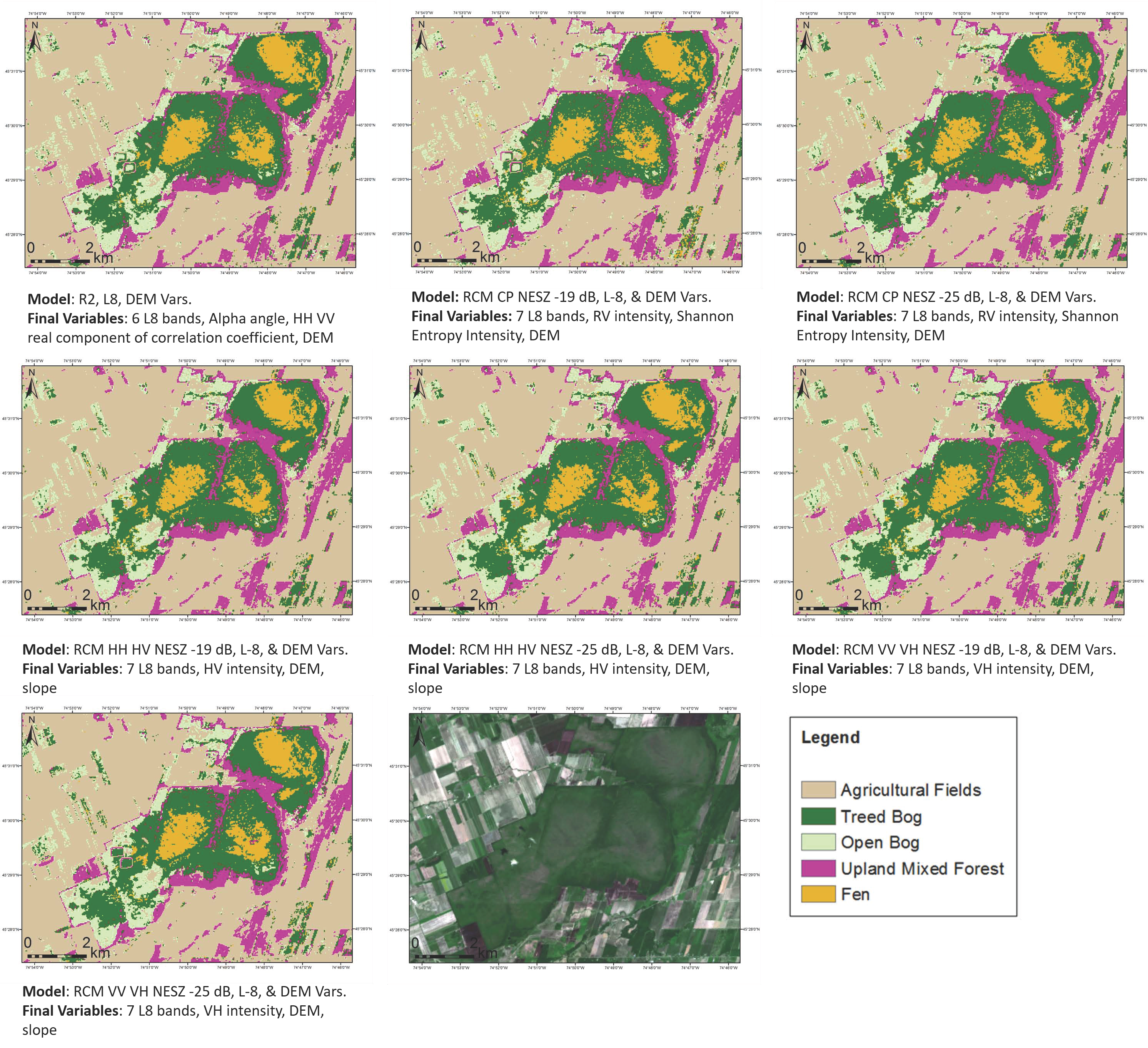
Statistical results from the RADARSAT-2 (13 July 2014), Landsat-8 (27 June 2014), and SRTM variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (9 variables) in order of decreasing importance were the six Landsat-8 bands, Alpha angle, HH+VV real component of the correlation coefficient, and SRTM DEM).
Table A8.
Statistical results from the RADARSAT-2 (13 July 2014), Landsat-8 (27 June 2014), and SRTM variables spring model. The first iteration was run with all 50 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (9 variables) in order of decreasing importance were the six Landsat-8 bands, Alpha angle, HH+VV real component of the correlation coefficient, and SRTM DEM).
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 50 | 75 | 76 | 0.68 | 77 | 94 | 62 | 93 | 100 | 46 | 76 | 73 | 81 | 57 |
| 45 | 74 | 75 | 0.75 | 76 | 94 | 62 | 93 | 100 | 42 | 77 | 74 | 81 | 57 |
| 40 | 75 | 76 | 0.68 | 76 | 95 | 63 | 93 | 100 | 43 | 78 | 73 | 82 | 59 |
| 35 | 75 | 76 | 0.68 | 76 | 95 | 63 | 93 | 99 | 43 | 75 | 67 | 85 | 64 |
| 30 | 74 | 71 | 0.61 | 71 | 94 | 61 | 89 | 86 | 38 | 74 | 65 | 76 | 48 |
| 25 | 76 | 76 | 0.68 | 76 | 93 | 64 | 90 | 95 | 51 | 72 | 66 | 87 | 61 |
| 20 | 76 | 77 | 0.69 | 76 | 93 | 65 | 91 | 94 | 54 | 74 | 67 | 88 | 63 |
| 15 | 77 | 78 | 0.71 | 77 | 92 | 67 | 90 | 93 | 56 | 74 | 70 | 89 | 68 |
| 12 | 78 | 77 | 0.70 | 79 | 93 | 64 | 84 | 91 | 61 | 76 | 68 | 82 | 61 |
| 11 | 79 | 77 | 0.70 | 78 | 93 | 66 | 82 | 90 | 61 | 77 | 74 | 82 | 61 |
| 10 | 78 | 79 | 0.73 | 79 | 95 | 70 | 83 | 92 | 66 | 77 | 74 | 84 | 63 |
| 9 | 74 | 81 | 0.74 | 81 | 94 | 69 | 86 | 93 | 68 | 78 | 76 | 89 | 65 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RADARSAT & SRTM variables | 51 | 53 | 0.36 | 59 | 87 | 33 | 50 | 77 | 23 | 51 | 34 | 59 | 33 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RADARSAT only | 37 | 32 | 0.10 | 38 | 51 | 23 | 47 | 54 | 12 | 30 | 29 | 2 | 0 |
Table A9.
Statistical results from the RCM CP NESZ −19 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 32 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, RV Intensity, Shannon Entropy Intensity, and SRTM DEM.
Table A9.
Statistical results from the RCM CP NESZ −19 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 32 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, RV Intensity, Shannon Entropy Intensity, and SRTM DEM.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 32 | 76 | 73 | 0.64 | 76 | 91 | 65 | 92 | 80 | 45 | 65 | 60 | 83 | 61 |
| 27 | 78 | 74 | 0.66 | 78 | 89 | 64 | 91 | 82 | 50 | 66 | 63 | 87 | 64 |
| 22 | 77 | 75 | 0.67 | 77 | 90 | 66 | 91 | 83 | 53 | 70 | 64 | 86 | 64 |
| 17 | 77 | 75 | 0.67 | 77 | 90 | 62 | 89 | 84 | 51 | 78 | 68 | 83 | 65 |
| 12 | 76 | 78 | 0.71 | 80 | 90 | 65 | 88 | 92 | 60 | 76 | 75 | 83 | 65 |
| 11 | 76 | 78 | 0.71 | 81 | 90 | 64 | 84 | 95 | 63 | 71 | 78 | 84 | 65 |
| 10 | 77 | 78 | 0.71 | 80 | 92 | 69 | 86 | 83 | 62 | 80 | 78 | 82 | 61 |
| 9 | 77 | 78 | 0.71 | 80 | 92 | 68 | 83 | 82 | 62 | 79 | 77 | 82 | 61 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RCM CP & SRTM variables | 50 | 52 | 0.37 | 64 | 78 | 41 | 64 | 58 | 30 | 33 | 39 | 65 | 20 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RCM CP only | 35 | 38 | 0.18 | 46 | 58 | 29 | 41 | 61 | 31 | 22 | 31 | 21 | 4 |
Table A10.
Statistical results from the RCM CP NESZ −25 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 32 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, Shannon Entropy Intensity, and SRTM DEM.
Table A10.
Statistical results from the RCM CP NESZ −25 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 32 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, Shannon Entropy Intensity, and SRTM DEM.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 32 | 74 | 75 | 0.68 | 74 | 90 | 70 | 86 | 86 | 50 | 73 | 72 | 81 | 68 |
| 27 | 75 | 78 | 0.70 | 77 | 90 | 71 | 86 | 87 | 58 | 74 | 75 | 84 | 69 |
| 22 | 74 | 78 | 0.70 | 77 | 90 | 70 | 88 | 89 | 57 | 74 | 74 | 84 | 68 |
| 17 | 76 | 77 | 0.70 | 77 | 91 | 68 | 87 | 90 | 58 | 77 | 74 | 80 | 63 |
| 12 | 76 | 78 | 0.71 | 78 | 92 | 70 | 85 | 84 | 59 | 81 | 75 | 79 | 65 |
| 11 | 77 | 77 | 0.70 | 79 | 92 | 68 | 83 | 83 | 61 | 81 | 75 | 78 | 62 |
| 10 | 76 | 79 | 0.73 | 81 | 90 | 66 | 89 | 96 | 64 | 74 | 78 | 87 | 65 |
| 9 | 76 | 79 | 0.72 | 81 | 90 | 64 | 88 | 94 | 63 | 72 | 77 | 89 | 65 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RCM CP & SRTM variables | 49 | 51 | 0.34 | 57 | 76 | 38 | 57 | 43 | 23 | 52 | 32 | 61 | 40 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RCM CP only | 28 | 34 | 0.13 | 41 | 47 | 21 | 43 | 36 | 22 | 44 | 29 | 43 | 14 |
Table A11.
Statistical results from the RCM Dual Pol HH+HV NESZ −19 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
Table A11.
Statistical results from the RCM Dual Pol HH+HV NESZ −19 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 75 | 77 | 0.70 | 81 | 90 | 58 | 87 | 95 | 59 | 84 | 79 | 78 | 61 |
| 13 | 75 | 78 | 0.71 | 81 | 90 | 59 | 91 | 95 | 58 | 84 | 78 | 85 | 61 |
| 12 | 75 | 78 | 0.71 | 81 | 90 | 60 | 90 | 93 | 59 | 84 | 78 | 84 | 61 |
| 11 | 75 | 79 | 0.72 | 81 | 90 | 62 | 93 | 92 | 59 | 82 | 78 | 87 | 62 |
| 10 | 75 | 79 | 0.72 | 81 | 90 | 63 | 93 | 92 | 61 | 81 | 74 | 87 | 63 |
| 9 (no radar) | 75 | 79 | 0.73 | 82 | 90 | 65 | 93 | 91 | 64 | 77 | 73 | 88 | 65 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RCM HH+HV & SRTM variables | 52 | 47 | 0.31 | 62 | 70 | 31 | 43 | 70 | 33 | 25 | 32 | 44 | 32 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RCM HH+HV only | 31 | 33 | 0.12 | 42 | 49 | 27 | 35 | 34 | 18 | 24 | 31 | 28 | 17 |
Table A12.
Statistical results from the RCM Dual Pol HH+HV NESZ −25 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
Table A12.
Statistical results from the RCM Dual Pol HH+HV NESZ −25 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 74 | 77 | 0.70 | 81 | 90 | 59 | 85 | 96 | 58 | 81 | 79 | 76 | 61 |
| 13 | 75 | 77 | 0.70 | 81 | 90 | 59 | 88 | 94 | 59 | 80 | 76 | 83 | 61 |
| 12 | 75 | 78 | 0.71 | 81 | 90 | 60 | 91 | 93 | 58 | 84 | 78 | 84 | 61 |
| 11 | 75 | 79 | 0.72 | 81 | 90 | 62 | 91 | 92 | 60 | 81 | 78 | 86 | 63 |
| 10 | 75 | 79 | 0.72 | 81 | 90 | 64 | 93 | 92 | 61 | 78 | 74 | 88 | 64 |
| 9 (no radar) | 75 | 79 | 0.73 | 82 | 90 | 65 | 93 | 91 | 64 | 77 | 73 | 88 | 65 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RCM HH+HV & SRTM variables | 54 | 49 | 0.33 | 63 | 71 | 32 | 40 | 65 | 36 | 28 | 36 | 44 | 34 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RCM HH+HV only | 29 | 35 | 0.13 | 44 | 56 | 23 | 32 | 47 | 23 | 23 | 25 | 19 | 10 |
Table A13.
Statistical results from the RCM Dual Pol VV+VH NESZ −19 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
Table A13.
Statistical results from the RCM Dual Pol VV+VH NESZ −19 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 74 | 78 | 0.71 | 82 | 90 | 61 | 86 | 92 | 62 | 80 | 74 | 79 | 65 |
| 13 | 75 | 78 | 0.71 | 82 | 90 | 61 | 89 | 92 | 63 | 76 | 74 | 82 | 61 |
| 12 | 75 | 78 | 0.72 | 83 | 90 | 62 | 90 | 92 | 63 | 77 | 74 | 83 | 63 |
| 11 | 75 | 78 | 0.71 | 81 | 90 | 62 | 90 | 92 | 61 | 79 | 74 | 83 | 62 |
| 10 | 75 | 79 | 0.72 | 81 | 90 | 63 | 93 | 92 | 61 | 81 | 74 | 87 | 63 |
| 9 | 76 | 78 | 0.71 | 82 | 90 | 63 | 88 | 92 | 61 | 70 | 74 | 89 | 65 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RCM VV HV & SRTM variables | 51 | 53 | 0.38 | 68 | 78 | 36 | 55 | 59 | 37 | 35 | 28 | 43 | 32 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RCM HH+HV only | 31 | 36 | 0.16 | 45 | 51 | 27 | 50 | 53 | 19 | 20 | 18 | 36 | 25 |
Table A14.
Statistical results from the RCM Dual Pol VV+VH NESZ −25 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
Table A14.
Statistical results from the RCM Dual Pol VV+VH NESZ −25 dB (13 July 2014), Landsat-8 (27 June 2014), SRTM variables summer model. The first iteration was run with all 14 variables, and variables ranked to be unimportant were then removed until 9 variables remained. The final variables in the model with the highest independent overall accuracy (10 variables) in order of decreasing importance were the seven Landsat-8 bands, HV Intensity, SRTM DEM, and SRTM slope.
| Number of Variables | OOBE (%) | Independent Overall Accuracy (%) | Kappa Statistic | Agricultural Fields | Treed Bog | Open Bog | Upland Mixed Forest | Fen |
|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) |
|---|
| 14 | 75 | 79 | 0.72 | 77 | 93 | 68 | 90 | 95 | 59 | 83 | 74 | 84 | 63 |
| 13 | 75 | 78 | 0.71 | 77 | 93 | 68 | 91 | 95 | 58 | 80 | 74 | 87 | 61 |
| 12 | 76 | 79 | 0.72 | 77 | 93 | 68 | 91 | 96 | 60 | 81 | 74 | 87 | 61 |
| 11 | 76 | 79 | 0.72 | 78 | 93 | 68 | 90 | 96 | 63 | 80 | 74 | 84 | 61 |
| 10 | 77 | 81 | 0.74 | 80 | 93 | 69 | 89 | 96 | 70 | 81 | 74 | 82 | 61 |
| 9 | 76 | 79 | 0.73 | 80 | 92 | 68 | 82 | 96 | 71 | 74 | 73 | 79 | 62 |
| Landsat & SRTM variables | 76 | 76 | 0.69 | 77 | 89 | 67 | 83 | 83 | 61 | 75 | 73 | 87 | 64 |
| RCM VV HV & SRTM variables | 51 | 52 | 0.35 | 61 | 80 | 39 | 51 | 62 | 30 | 33 | 25 | 47 | 38 |
| Landsat only | 77 | 75 | 0.67 | 77 | 87 | 63 | 82 | 83 | 58 | 74 | 74 | 80 | 61 |
| RCM HH+HV only | 31 | 31 | 0.11 | 42 | 40 | 22 | 44 | 60 | 18 | 19 | 22 | 21 | 18 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}