1. Introduction
Tropical forests are among the most complex ecosystems on Earth, playing crucial roles in biodiversity conservation and in ecology dynamics at global scale [
1]. According to Viana and Tabanez [
2], the Atlantic Rain Forest is one of the most endangered tropical ecosystems in the world, owning merely less than 16% of its original area [
3]. This biome has been particularly affected by anthropogenic factors, such as industrial activities and urbanization, which brought changes in land cover and land use. As a result, forest remnants are sparsely found and present different degradation levels and successional forest stages.
Despite these threats, the Atlantic Forest and its associated ecosystems (sandbanks and mangroves) are still rich with respect to biodiversity, accounting for a meaningful share of the national biodiversity, with high rates of endemism [
4]. As reported by these authors, this complex biome contains greater species diversity than that observed in the Amazon Forest. This species richness, the extremely high rates of endemism and the small percentage of this forest remnants led Myers et al. [
5] to classify the Atlantic Forest among the main global biodiversity hot spots.
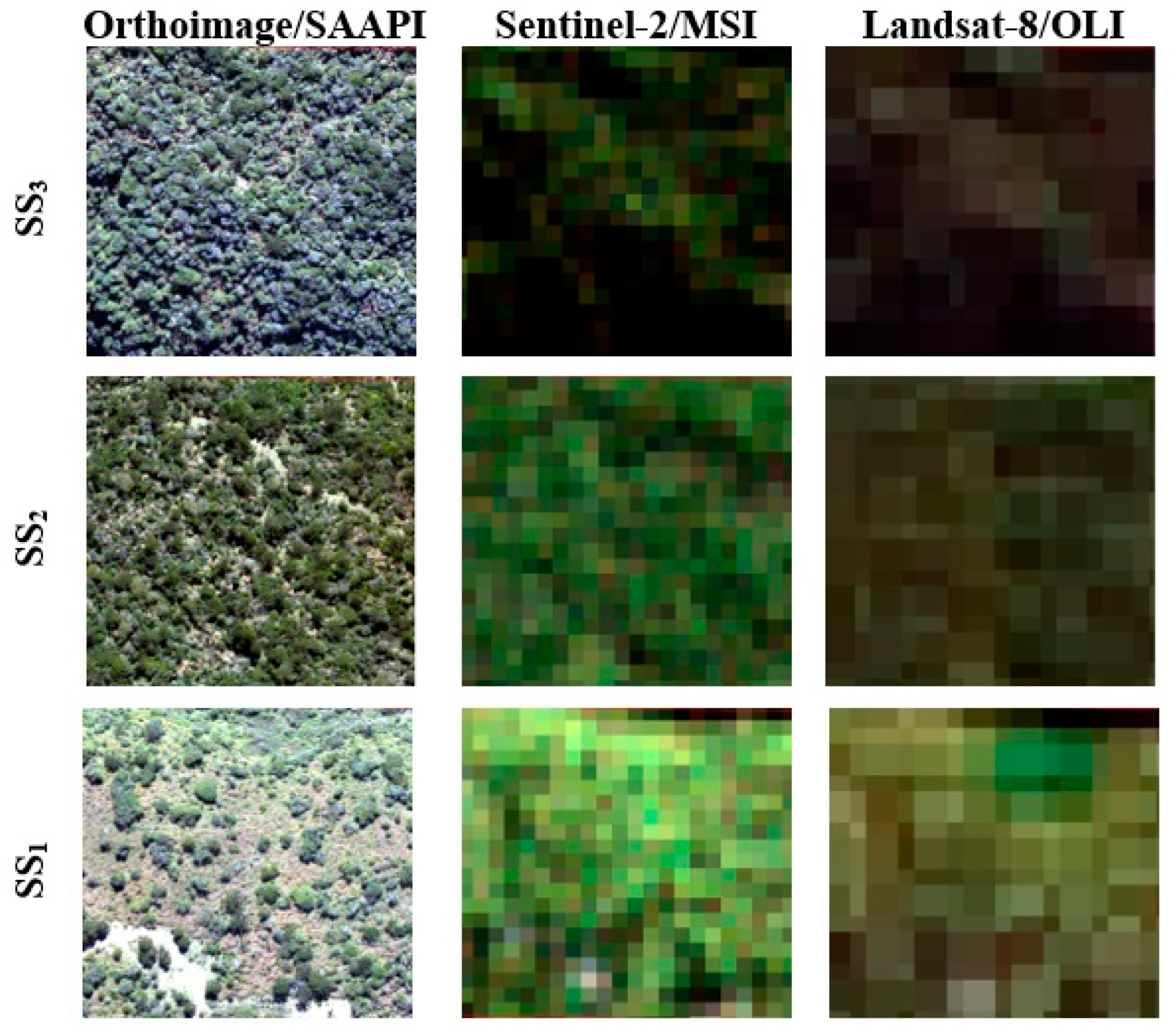
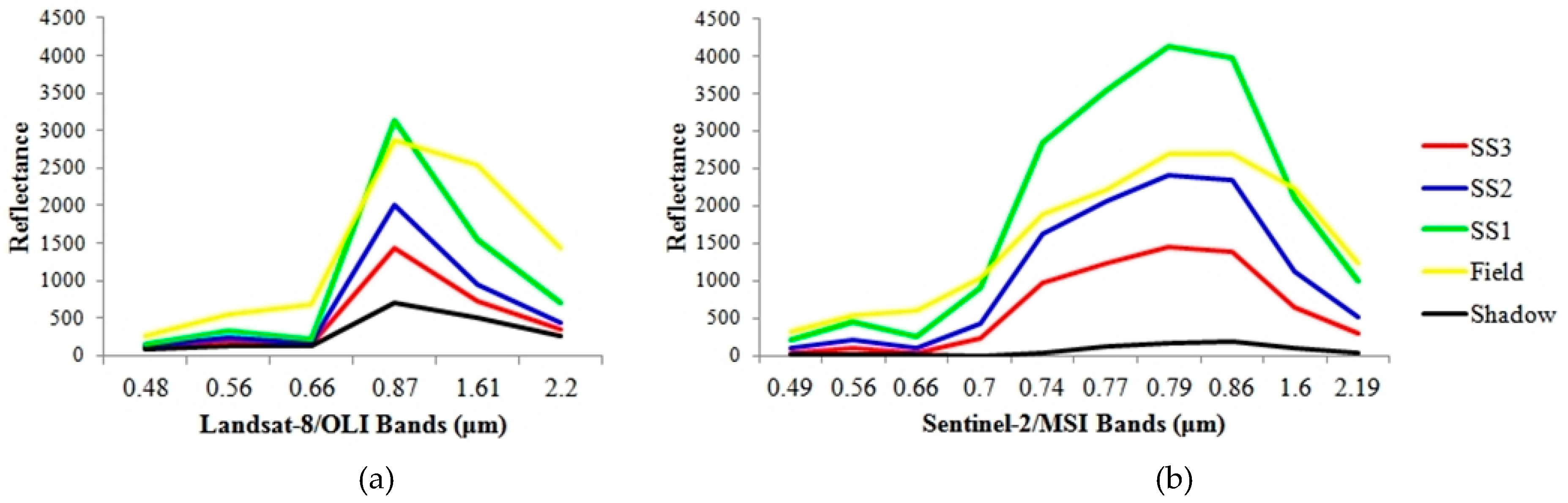
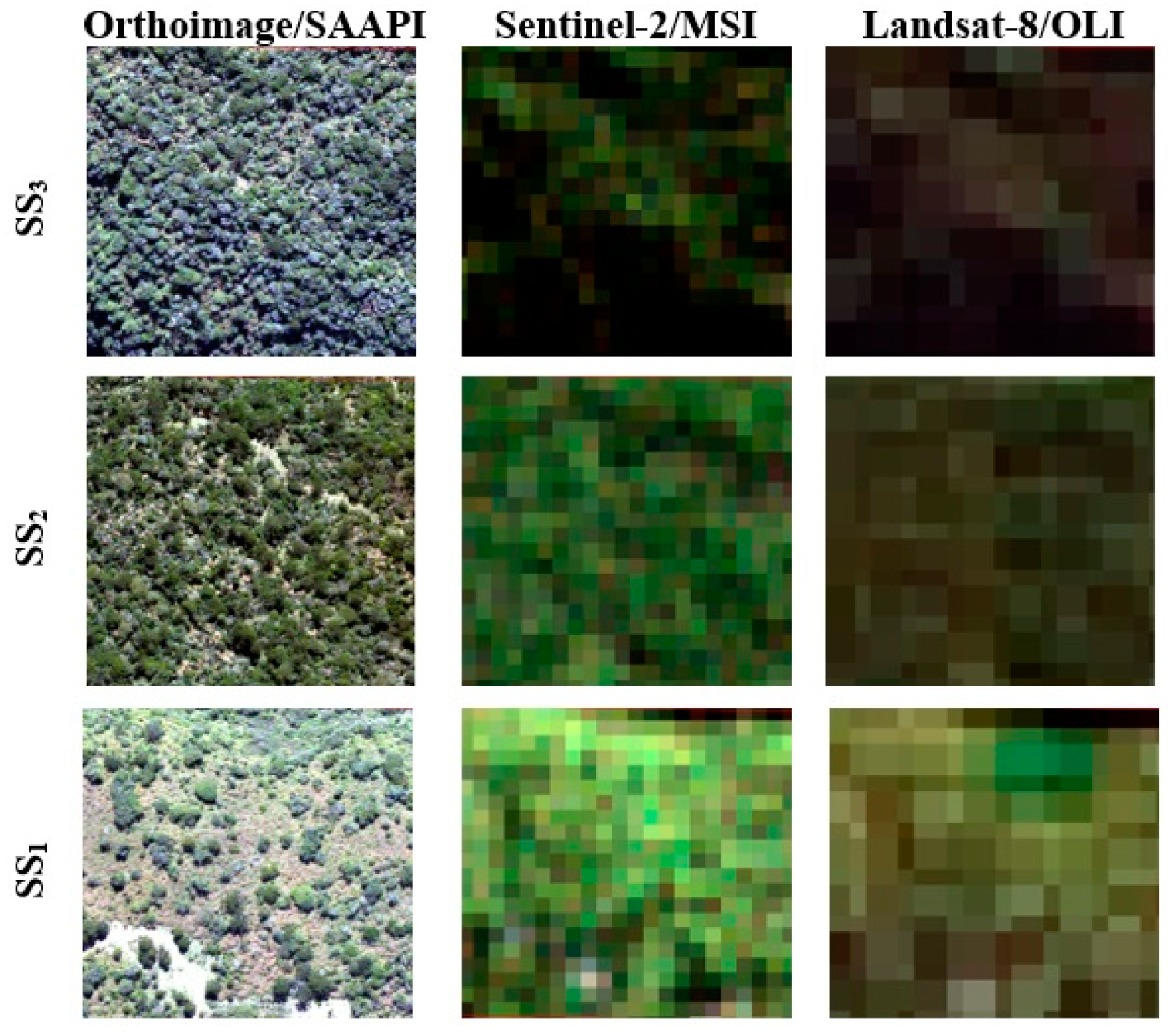
In a general way, with the help of field measurements, vegetation can be grouped into three stages of forest succession: early stage (SS
1), intermediate stage (SS
2) and advanced stage (SS
3) [
6,
7,
8,
9]. Each of them owns particular characteristics with regard to species composition and vegetation structure [
7]. In the case of the Atlantic Forest, the successional stages are dealt with and regulated in different ways by the Brazilian environmental protection legislation, for instance in the case of the Atlantic Forest Law (Law Nr. 11.428/2006) [
10]. In this way, mapping these stages represents a fundamental task to support studies with manifold applications, besides management, surveillance and environmental conservation initiatives [
3], hence allowing quantitatively and qualitatively assessing the forest remnants as well as their spatial distribution.
In the latest decades, mankind has witnessed a remarkable advancement of space technologies targeted to monitoring forest resources. The recent refinement of both spatial and spectral settings of orbital sensors and the increasing improvement in the classification algorithms have strengthened the usability of remote sensing data as a source for land cover and land use mapping [
11]. Orbital remote sensing tends to be considerably more advantageous when compared to conventional in situ mapping, not only because these data are systematically acquired, allowing their application at large scales, but also because they involve a less capital- and labor-intensive acquisition [
12].
Nevertheless, mapping forest successional stages by means of remote sensing imagery imposes further challenges in the classification process, since the reflectance spectra of the concerned classes are very similar [
13]. Several authors have committed themselves to characterize and classify successional stages of vegetation using remotely sensed imagery [
8,
13,
14,
15,
16,
17,
18,
19,
20,
21]. As stated by Lu et al. [
8], the selection of appropriate variables and the development of refined algorithms are the two core research topics to be pursued in order to improve the performance of vegetation classification.
In addition to this, the new generation of Earth observation satellites offers a considerable improvement in the spectral, radiometric and spatial resolutions of their payloads. The quality of data acquired by these satellites associated with shorter revisit times allows the inclusion of temporal information on the vegetation phenology in the classification process. The Landsat satellite series has been providing valuable data sets for monitoring and mapping the Earth surface for over 40 years [
22]. The Landsat-8 satellite, launched in 2013, enhanced the imaging capacity of this series, introducing new spectral bands in the blue and short-wave infrared (SWIR) ranges, as well as improving the sensor signal/noise ratio and the images radiometric resolution [
23]. The Operational Land Imager (OLI) sensor supplies optical images with 30 m of spatial resolution, eight spectral bands and 16 days of temporal resolution [
24].
Sentinel-2, a multispectral sensor of medium spatial resolution produced by the European Space Agency (ESA), was conceived to assure the continuity of global data coverage of the Earth surface accomplished by Landsat and SPOT satellites series. This mission was launched in 2015 and presents a wide swath (290 km), good revisit capacity (five days, with two satellites), high and medium spatial resolution (10, 20 and 60 m) and a relatively high number of bands (13 spectral bands) [
25]. Considering that it is a newly launched satellite, studies to investigate its potential for forest applications are still few and incipient. Among works published using simulated or pre-operational data of this satellite, we ought to mention the paper of Frampton et al. [
26], who used simulated Sentinel-2 data for estimating biophysical variables of vegetation; Immitzer et al. [
27], who tested the use of Sentinel-2 data for mapping agricultural and tree species in Austria and Germany; and Addabbo et al. [
28], who verified the capacity of these data for vegetation monitoring.
Besides the imagery properness, the right choice of classification methods is also decisive for a successful land cover and land use mapping [
29]. Nonparametric methods, such as those based on machine learning, have gained great attention for classifying species and forest typologies [
30]. Among the most often used ones, K-Nearest Neighbors (KNN), Artificial Neural Networks (ANN), Decision Trees (DT), Random Forest (RF) and Support Vector Machine (SVM) are to be mentioned. According to Prasad et al. [
31], DTs are sensitive to small changes in the training data set and have been said to be occasionally unstable, for they tend to overfit the model to the training data. Naidoo et al. [
32] report that it is difficult to set the ideal value of K for the KNN classifier, while ANN is a technique that demands greater computational processing due to its high level of complexity. Therefore, among the state-of-the-art nonparametric algorithms, both RF and SVM machine learning methods have been on the spot light due to their effectiveness in images classification [
11]. This includes their ability to synthesize regression or classification functions based on discrete or continuous data sets, insensitivity to noise or overtraining, and ability to deal with unbalanced data sets [
33].
Several studies compared the performance of the above-mentioned classifiers among themselves or in relation to other nonparametric classifiers, with the intent of classifying either land cover/land use [
11], agricultural areas [
34] or forests [
30,
35,
36,
37]. The authors of such works reached no consensus, for the performance of a classifier is always dependent on the particular test sites characteristics, on the type and quality of the remotely sensed data, and also on the number and general aspects of the classes of interest. Adam et al. [
11] and Gosh et al. [
37], for instance, found no statistically significant difference between the results of RF and SVM. In the same line, Ferét and Asner [
36] acknowledged that no unique optimal classifier was found for all conditions tested, but emphasized the possibility of improving SVM classification with a better optimization of its parameters. Li et al. [
34], on their turn, concluded that RF attained the best results in comparison with SVM and showed to be more stable in face of changes in the segmentation parameters and in the attributes selection. In contrast to these authors, Dalponte et al. [
35] and Deng et al. [
30] state the superior performance of SVM and Quadratic SVM (QSVM), respectively, as compared to RF. According to Dalponte et al [
35], RF has the advantage of requiring less parameters to be estimated and a reduced computational cost. Nevertheless, when RF is applied to unbalanced training data, it tends to focus more on the prediction accuracy of prevailing classes, which generally results in low accuracy of less representative classes.
We should point out that previous investigations have shown that GEOBIA approaches improve classification accuracies in forest applications [
21,
36,
38,
39,
40]. As highlighted by Ma et al. [
38], although GEOBIA is often applied to medium spatial resolution imagery, high spatial resolution remote sensing images still remain as the most frequently used data source in such applications. In the current work, besides using medium spatial resolution imagery, we specifically deal with a limited number of classes (five), and in this particular case, the literature reports that GEOBIA and pixel-based classifications tend to attain similar accuracies [
41,
42]. Weih and Riggan [
41] compared the performance of a pixel-per-pixel classification with GEOBIA applied to high resolution ortophotos and SPOT-5 medium resolution imagery for the discrimination of 13 land cover and land use classes. The authors concluded that the use of GEOBIA did not present significantly different results from those derived from the pixel-based classification when applied to the SPOT-5 10 m spatial resolution images. Lu et al. [
9] comparatively evaluated the maximum likelihood classifier (MLC), ANN, KNN, SVM, DT and GEOBIA applied to Landsat-5/TM and ALOS PALSAR medium resolution images for the classification of three successional vegetation stages in the Brazilian Amazon Forest. The authors came to the conclusion that the classifiers performance varied as a function of the data sets used, and that GEOBIA had a similar performance in relation to the other methods. Meroni et al. [
42] tested the accuracy of the RF classifier and different classification set-ups, varying the spatial resolution (the original 30 m vs. the pan-sharpened 15 m) and image acquisition dates (during the wet season, the dry season and a combination of the two) for seven classes involving different forest types and species. The best overall accuracy (84%) was achieved using the pan-sharpened data from the two seasons. The authors compared pixel-based and GEOBIA approaches and concluded that GEOBIA achieved the same overall accuracy in the specific presence of such a small number of classes.
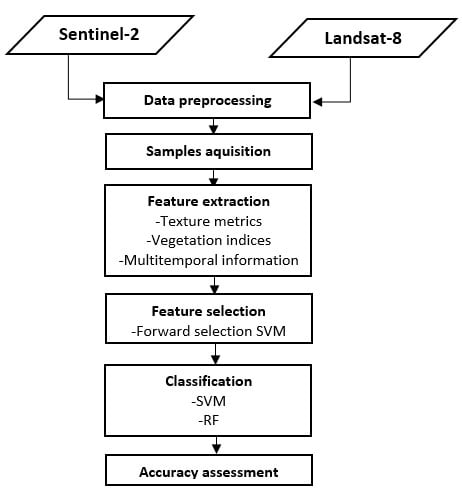
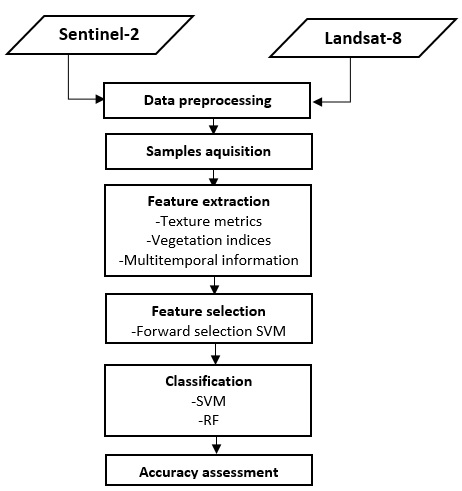
Considering the research above, the general goal of this work is to evaluate the performance of both Landsat-8 and Sentinel-2 imagery for the semiautomatic pixel-based classification of successional stages in a particular subtropical Atlantic Forest environment. The specific goals are: (1) successional stages mapping with Landsat-8 and Sentinel-2 data; (2) verification of the contribution of textural metrics, vegetation indices and multitemporal data for the classification of successional stages; and (3) comparison of the performance of two machine learning algorithms (RF and SVM).
4. Discussion
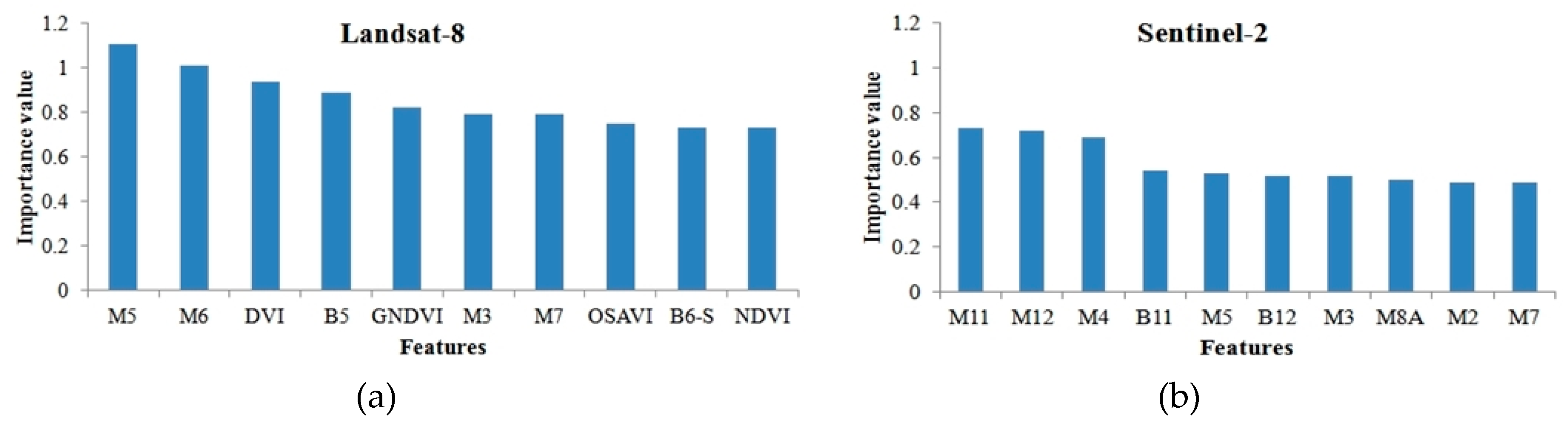
This study showed that the multispectral sensors Sentinel-2 and Landsat-8 are a valuable source of data for discriminating successional stages in an area of a subtropical forest. In the case of the Landsat-8 data, the addition of “spring” bands was more relevant to classification, considering the fact that three “spring” bands were chosen by the SVM classifier at the attributes selection stage (
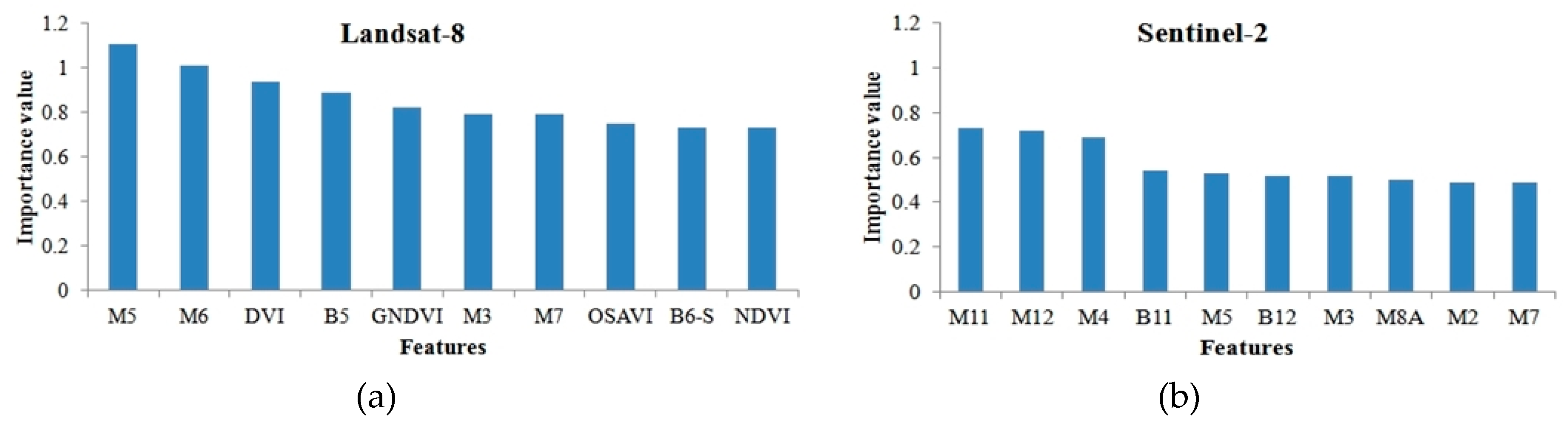
Table 5) and that one of them integrates the ranking of the 10 most important variables for the RF algorithm (
Figure 6). One of the underlying reasons for this may be the solar geometry during image acquisition, since the “spring” scenes tend to present better illuminated pixels. Other authors also obtained better results when adding multitemporal information to their input dataset. Cetin et al. [
83], when testing the efficacy of the contribution of Landsat-ETM+ and Terra ASTER multitemporal data for the semiautomatic classification of land cover and land use in Turkey, concluded that the combination of two multitemporal images resulted in slightly superior results. Murthy et al. [
89] pointed out that the usage of multitemporal data increased the spectral separability of agricultural fields in India. Clark and Kilham [
65] evaluated different metrics for classifying land cover and land use in California with HyspIRI simulated data and the RF classifier and they realized that the employment of multitemporal metrics increased the overall accuracy between 0.9% and 3.1% in comparison with the use of “Summer” metrics alone.
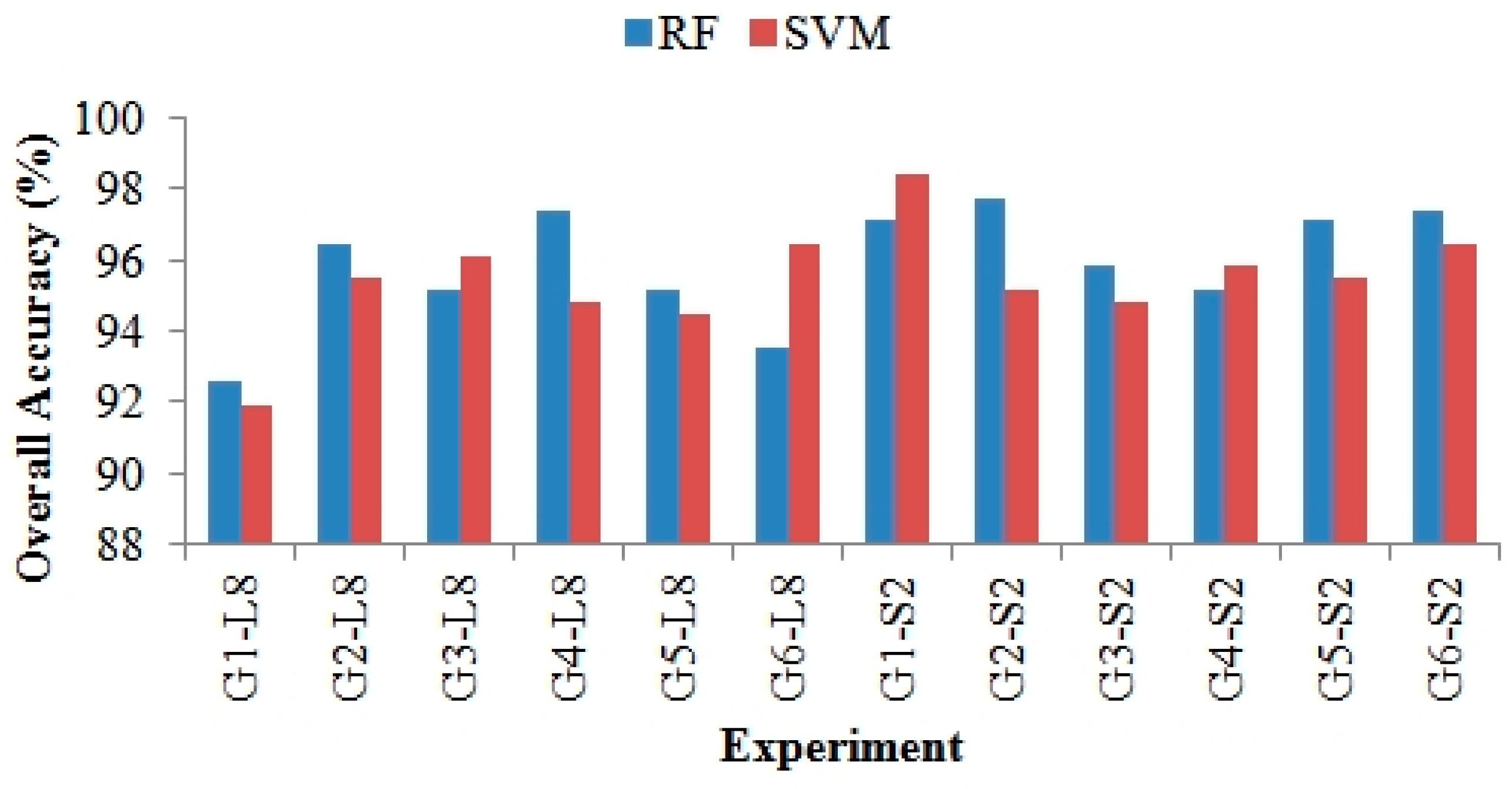
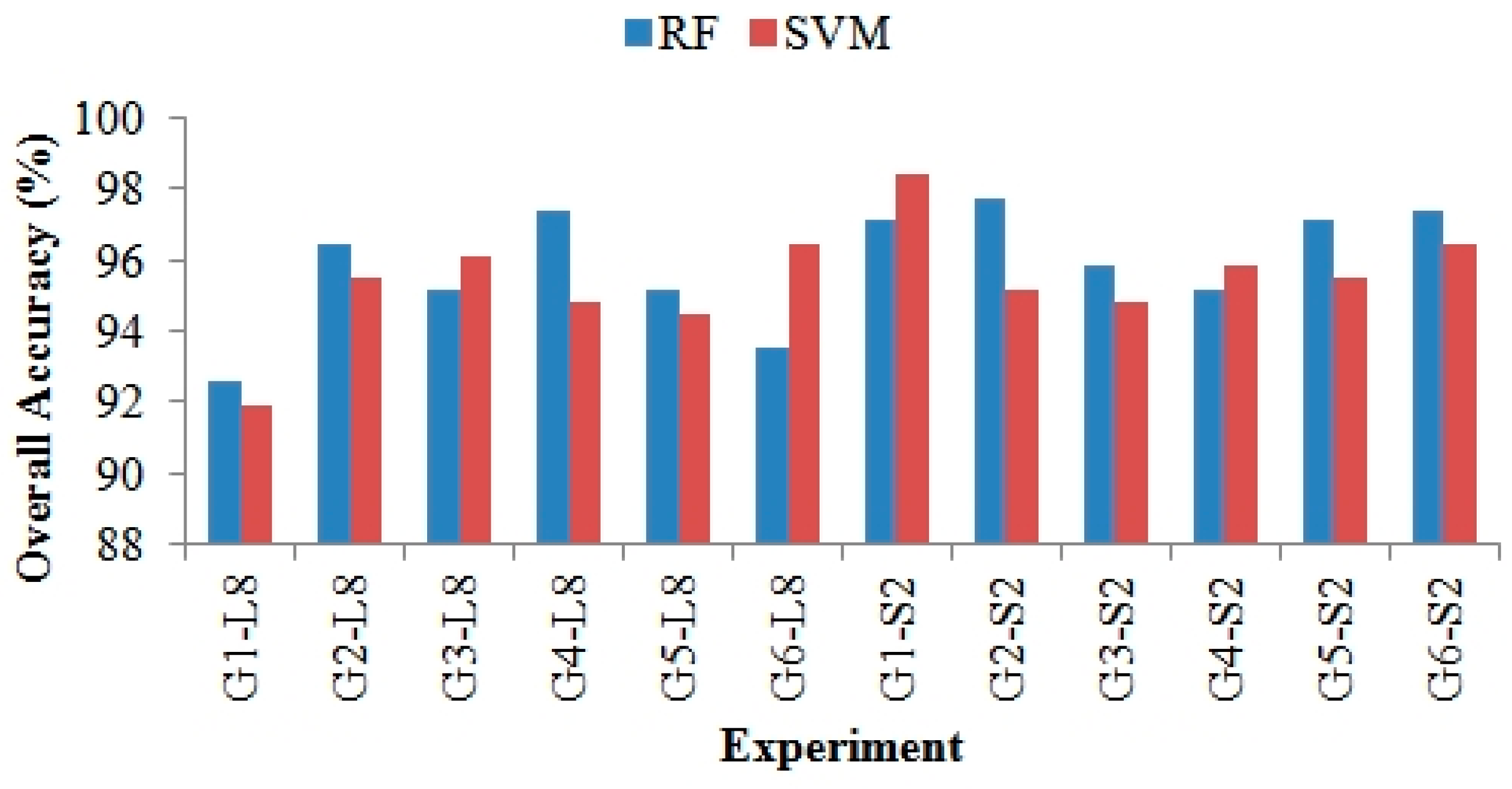
Regarding the classifiers performance, it was observed that the RF algorithm, when applied to the Sentinel-2 data, was less sensitive to the increase in variables when compared to SVM. In the experiment comprising all metrics (G5-S2), the SVM performance was significantly inferior in relation to using just the pure spectral bands of Sentinel-2, while, in the case of the RF classifier, the results of the G1-S2 and G5-S2 experiments did not present a significant difference. Walton [
90] emphasizes the capacity of the RF algorithm in dealing with weak explanatory variables, which explains the fact that this was the only classifier that experienced increases in accuracy with the corresponding inclusion of variables in all evaluated experiments. Clark and Kilham [
65] stress that one of the advantages of this classifier is its ability to handle well with predictor variables with multimodal distribution due to the high variability in time and space. This is the case of classes such as agricultural fields, which present variations in spectral response as a function of the type of culture and its life cycle, and forests, where the bidirectional reflectance factor varies according to the illumination conditions and their phenological properties. Novack et al. [
91] also point out the fact that the RF classifier evaluates each attribute internally, and hence, it is less influenced by the correlation and dimensionality of the attributes hyperspace. As to the SVM, in the specific case of the G5-S2 experiment, the increase in the number of variables may have caused an overfit of the model to the training samples. However, this statement cannot be generalized, given that for the Landsat-8 data both classifiers improved their performance with the addition of new variables.
Regarding the employed multispectral data, both Landsat-8 and Sentinel-2 reached similar accuracies in most of the experiments. Nevertheless, when considering just the multispectral bands of each sensor, the Sentinel-2 data classification achieved a significantly superior accuracy to that obtained by the Landsat-8 data. This result agrees with the findings of Topaloglu et al. [
92], who compared the performance of land cover and land use semiautomatic classification with the SVM and maximum likelihood algorithms and also using Sentinel-2 and Landsat-8 imagery. In that work, SVM presented a superior performance, with an overall accuracy of 81.7% for Landsat-8 data, and of 84.17% for Sentinel-2 data. Both classifiers attained a superior performance when dealing with Sentinel-2 data. Sothe et al. [
93] comparatively evaluated the algorithms maximum likelihood and RF for classifying land cover and land use in a coastal environmental in the south of Brazil using Sentinel-2 and Landsat-8 imagery, and concluded as well that the classification with Sentinel-2 data obtained a superior performance to that executed with Landsat-8 data.
In the experiments accomplished with both satellites data, the texture mean was one of the most important variables for the two data sets, mainly Sentinel-2. The use of textural information was acknowledged as a strong attribute for differentiating vegetation classes by several authors [
52,
92,
93,
94,
95,
96,
97]. Sette and Maillard [
94] classified vegetation successional stages of a Dense Ombrophilous Forest in the Atlantic Rain Forest with FORMOSAT-2 imagery and obtained an overall accuracy of 60.5% based only on visible bands, which rose to 91% when the classification also relied on textural attributes. Araújo [
95] verified an improvement in the discrimination between trees and grass with the introduction of an attribute indirectly based on texture, which considered the number of subobjects contained within each of these two classes in an immediately inferior segmentation level. According to the authors, since the texture of the trees class is rougher due to the presence of shadow amid the canopy leaves, this class tended to present a higher number of subobjects in comparison to grass.
Several authors highlighted the importance of both the SWIR and red-edge spectral regions for classifying forest types and agricultural fields [
27,
98,
99]. Immitzer et al. [
27], when using Sentinel-2 data for discriminating vegetation species and cultures with the RF classifier, also concluded that the SWIR and red-edge bands had a decisive importance in the images classification. Schultz et al. [
98] used Landsat-8 data and RF for mapping cultures in the southeastern portion of Brazil, and they found that the SWIR-1 and SWIR-2 bands as well as NDVI were the most important predictor variables. Ramoelo et al. [
99], when using Sentinel-2 data and the RF algorithm, verified that the SWIR-1 and SWIR-2 bands together with the first red-edge band achieved the highest importance values for assessing leaf nitrogen content in the African savannah. In many other works, the introduction of bands from the red-edge region in the classification process increased the separability among land cover and land use classes [
11,
100,
101,
102], and, hence, improved the classification accuracies of forests and agricultural fields.
Regarding the OLI sensor data, besides the SWIR bands texture means, the NIR band and three vegetation indices are worth mentioning, which stands in opposition to the MSI sensor, for which there was no vegetation index in the ranking of the most important variables. The listed vegetation indices (GNDVI, NDVI and OSAVI) explore the vegetation contrast between the NIR and visible bands, and might have been considered more relevant due to the fact that the OLI sensor does not provide data in the red-edge region. This can also be checked in the classification results, since according to
Table 6, the inclusion of vegetation indices to the Sentinel-2 data set did not produce an increase in the classification accuracy, while for the Landsat-8 data, this led to a considerable improvement in the results. Satellites such as Sentinel-2 and Landsat-8 provide systematic coverage of the Earth surface, allowing a timely, cheap and large scale monitoring of forest remnants worldwide. This enables inspection and control of irregular activities (e.g., deforestation, illegal logging and forestry, etc.) as well as the conception of strategies for forest management and conservation. The information derived from these data can also support environmental regularization initiatives, such as the Rural Environmental Cadastre (CAR), a governmental program in Brazil designed for the inventory of natural assets and land cover/land use in rural properties.
5. Conclusions
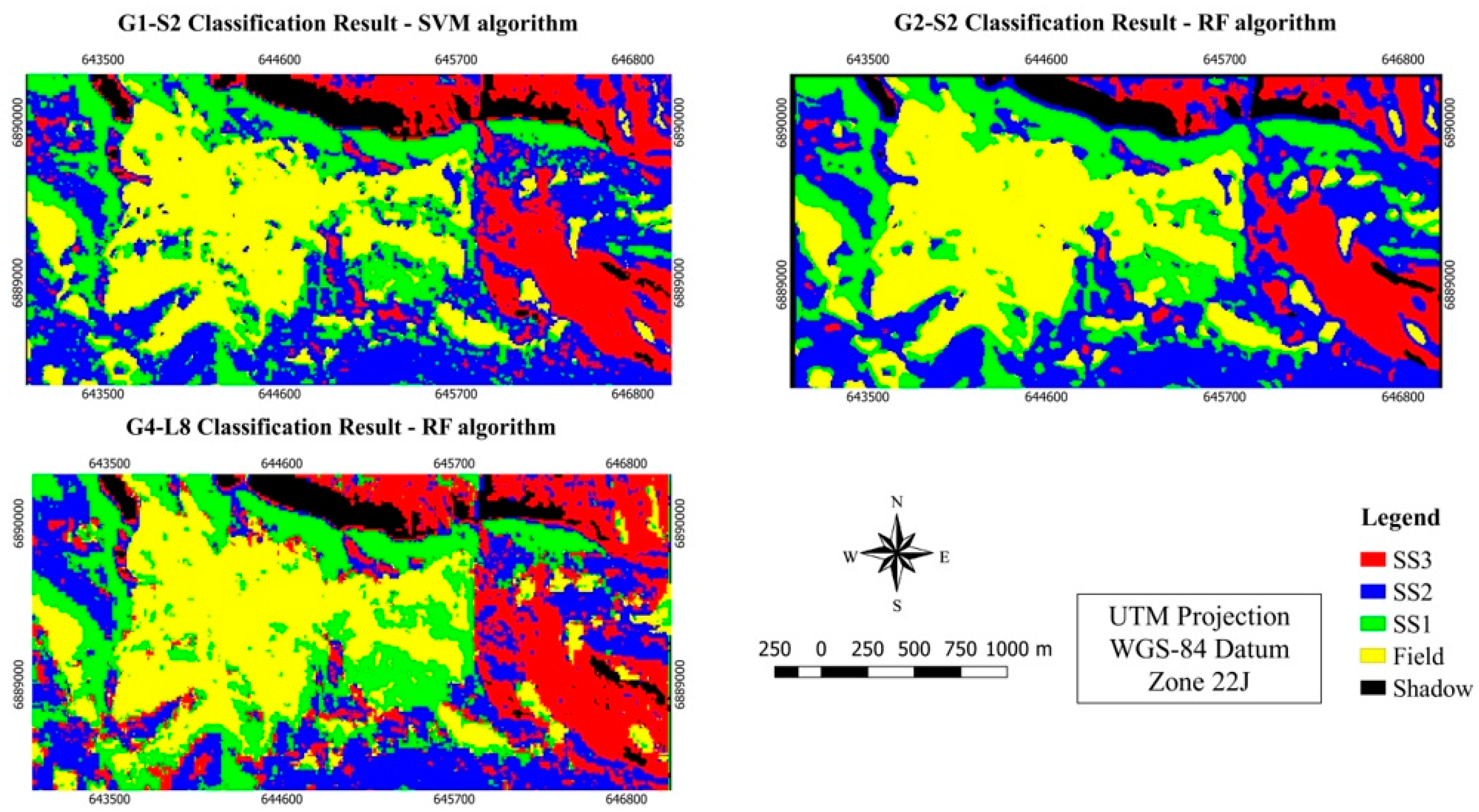
This study showed that both Landsat-8 and Sentinel-2 images have a great potential for the purpose of classifying vegetation successional stages in the study area. It is worth mentioning that the adopted methodology may be easily applied to further subtropical areas of the Atlantic Rain Forest with similar characteristics. The producer’s accuracy and user’s accuracy in all classification experiments were equal or superior to 80%. The best experiment attained a Kappa index of 0.98 (G1-S2 with SVM), while in the worst one this index reached 0.9 (G1-L8 with SVM), both comprising only the spectral bands of each sensor.
The addition of textural metrics, multitemporal information and vegetation indices in the classification process was important for increasing the accuracy of the Landsat-8 data classification, however, this did not bring meaningful improvements in the case of the Sentinel-2 images. For these latter data, the experiment that used spectral bands alone with the SVM classifier reached the highest accuracy, significantly superior to almost all of the experiments using Landsat-8 data. This fact can be explained by the greater spatial and spectral resolutions of MSI when compared to the OLI sensor.
The ranking with the 10 most important predictor variables showed that the texture means of SWIR and red-edge bands from both sensors as well as those derived from the Sentinel-2 red-edge bands are noteworthy, complying with other studies that also indicated that these spectral bands are of great relevance for the classification of vegetation. In face of the absence of red-edge spectral bands in the Landsat-8 satellite, the vegetation indices are instead present in such ranking of the most important variables.
With respect to the evaluated classifiers, it was observed that the RF showed to be less sensitive to the inclusion of variables in the classification process with the Sentinel-2 data, while the SVM classifier experienced a decrease in accuracy when using all variables. Nevertheless, this behavior was not observed for the Landsat-8 data, which in fact benefited from the inclusion of variables. As for the Landsat-8 data, the best result was achieved in the experiment that relied on multitemporal information, demonstrating that this sort of information should be explored with the intent of improving the classification accuracy of forest typologies.
Finally, this work indicated that the adopted approaches for the semiautomatic classification of the three successional stages in a patch of a subtropical portion of the Atlantic Rain Forest were promising. The herein produced findings are relevant not only for the conservation of this severely threatened biome, optimizing the mapping and monitoring of its forest remnants, but also for subsidizing actions in the scope of the Rural Environmental Cadastre (CAR) in Brazil, as exposed before. As directions for future work, we envisage expanding the study area and applying the tested methods in similar vegetation physiognomies.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}