
A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring


Abstract
:
1. Introduction
2. Satellite Sensors and Orbits
2.1. Satellite Remote Sensing Configurations
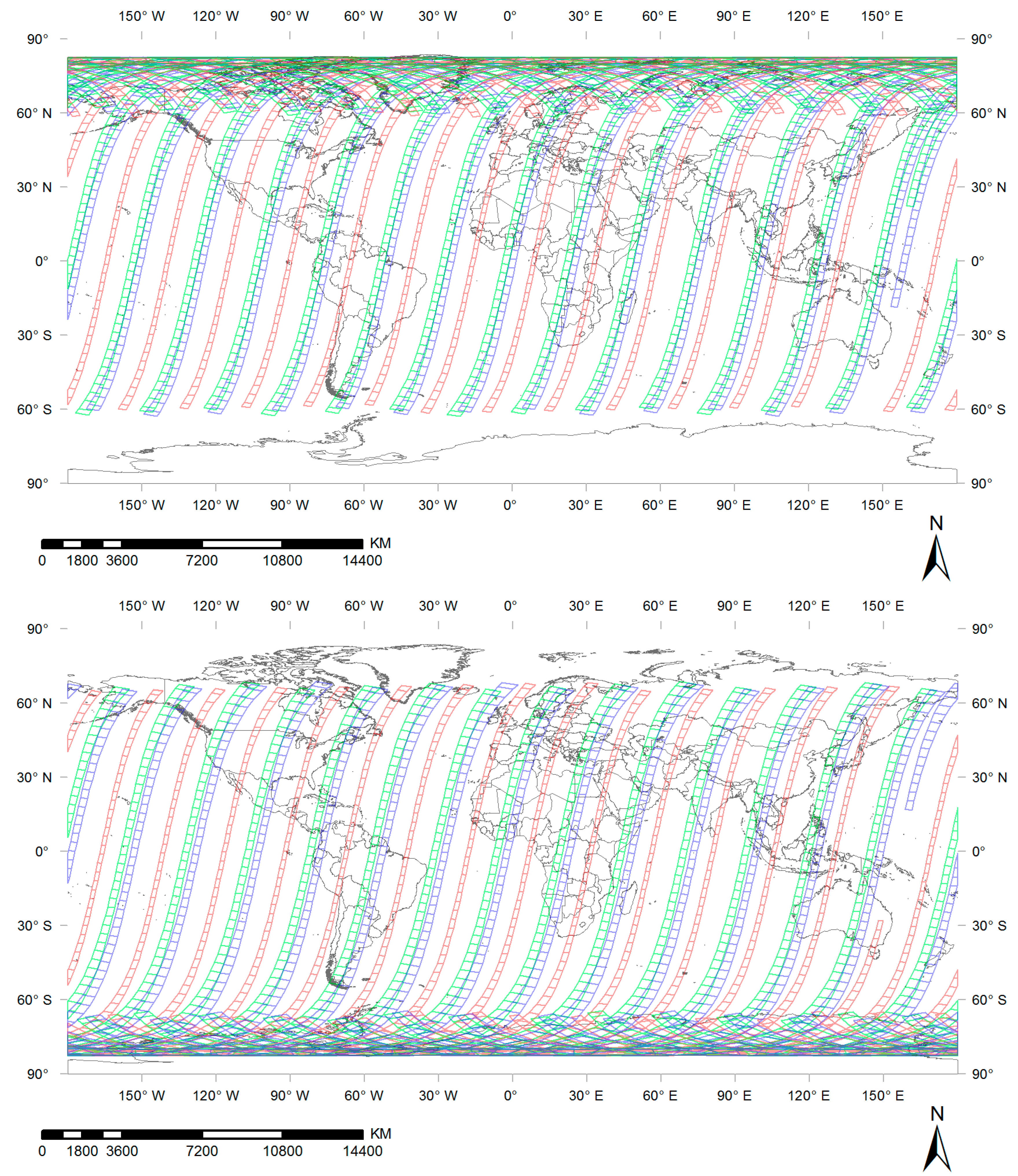
2.2. Sensor Orbit Swath Simulation with the CEOS Visualization Environment (COVE) Tool
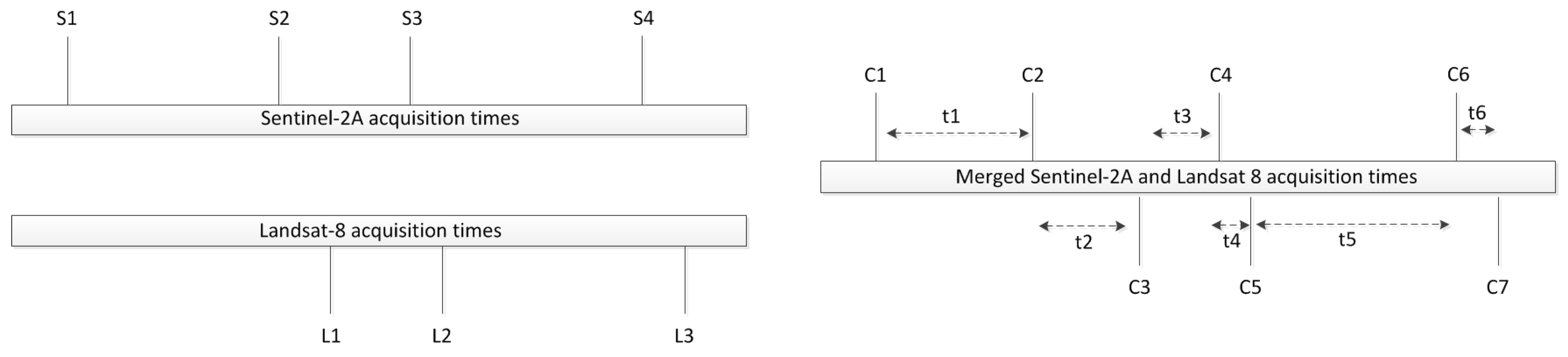
3. Methodology
4. Results
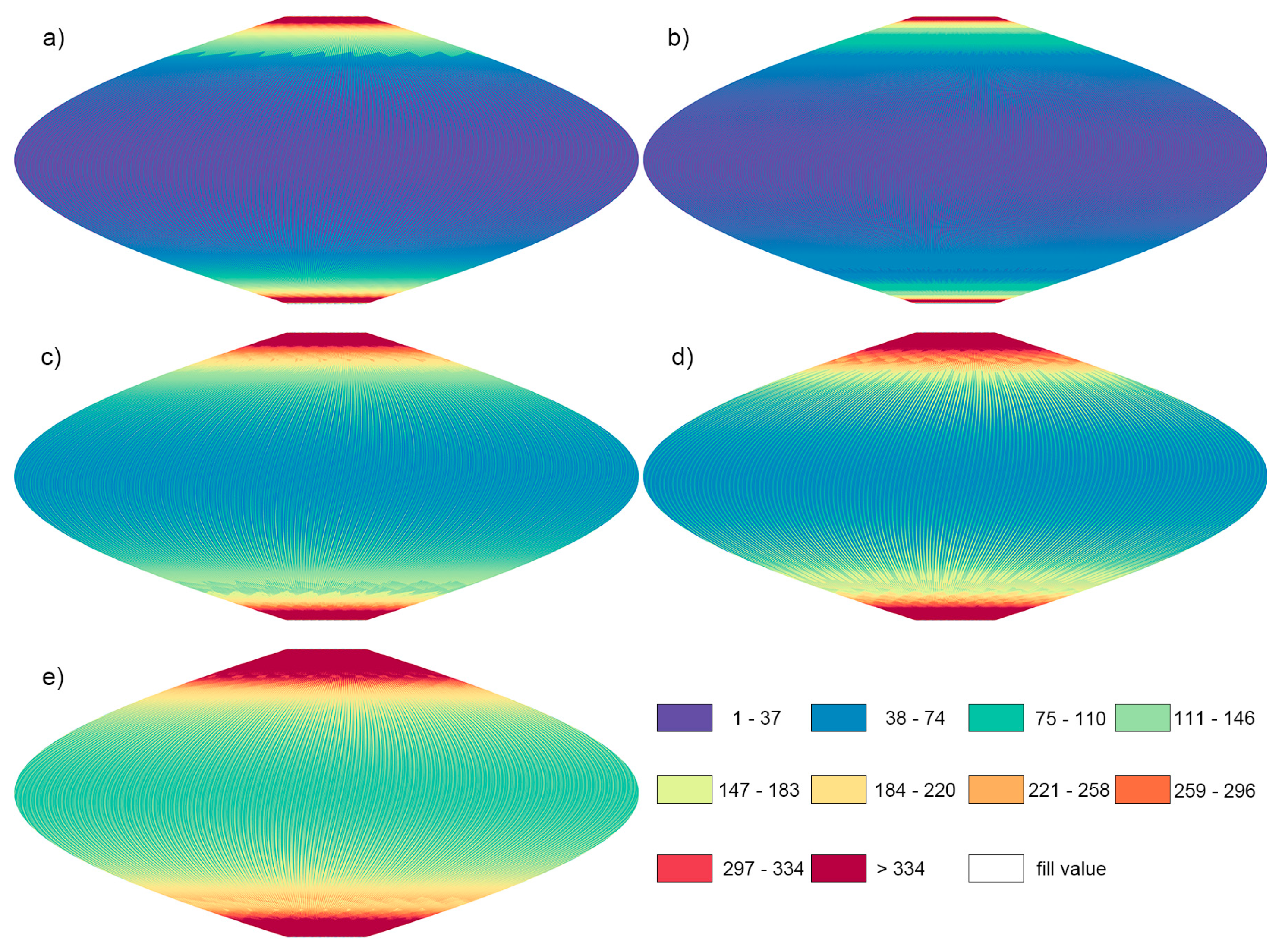
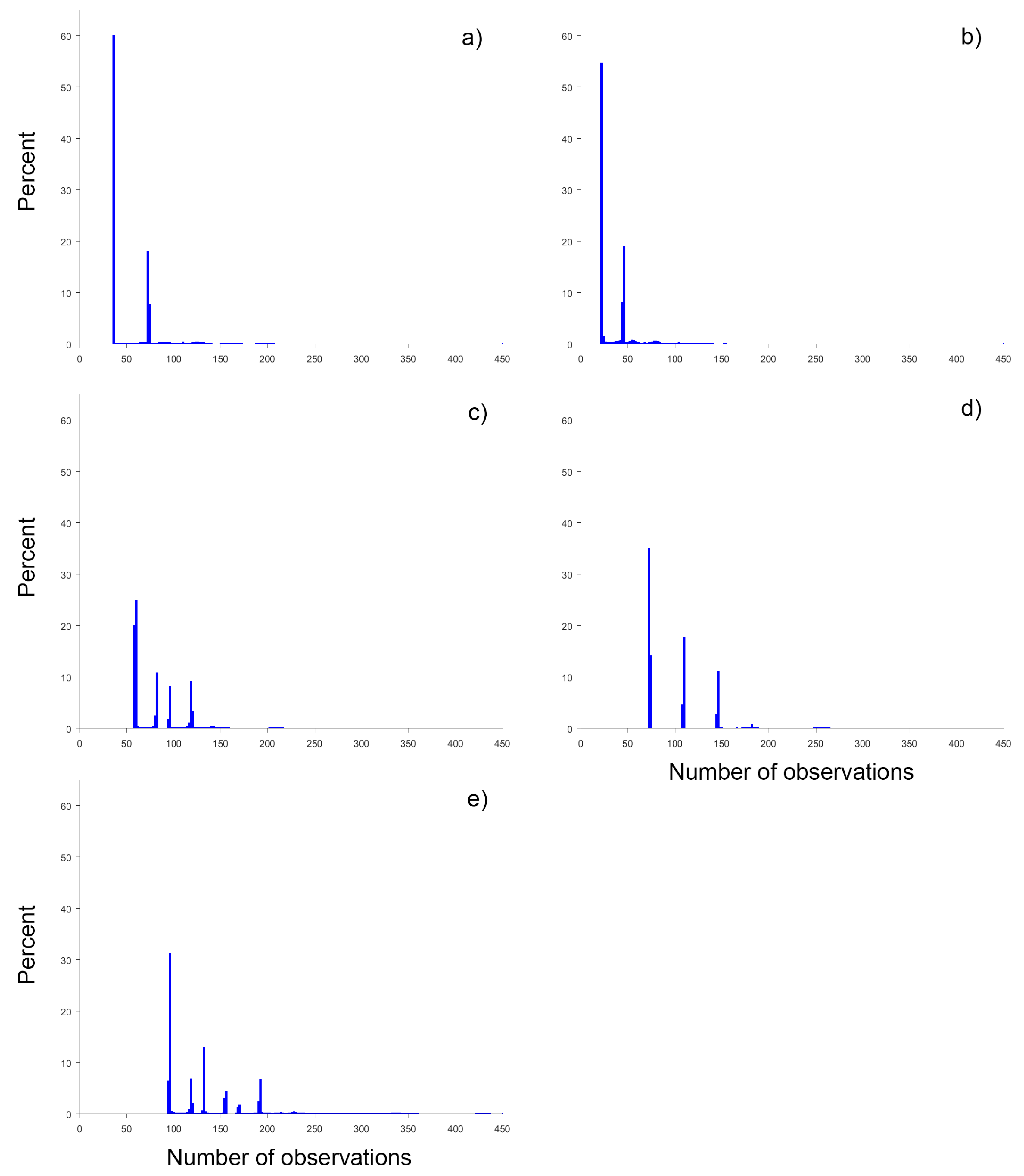
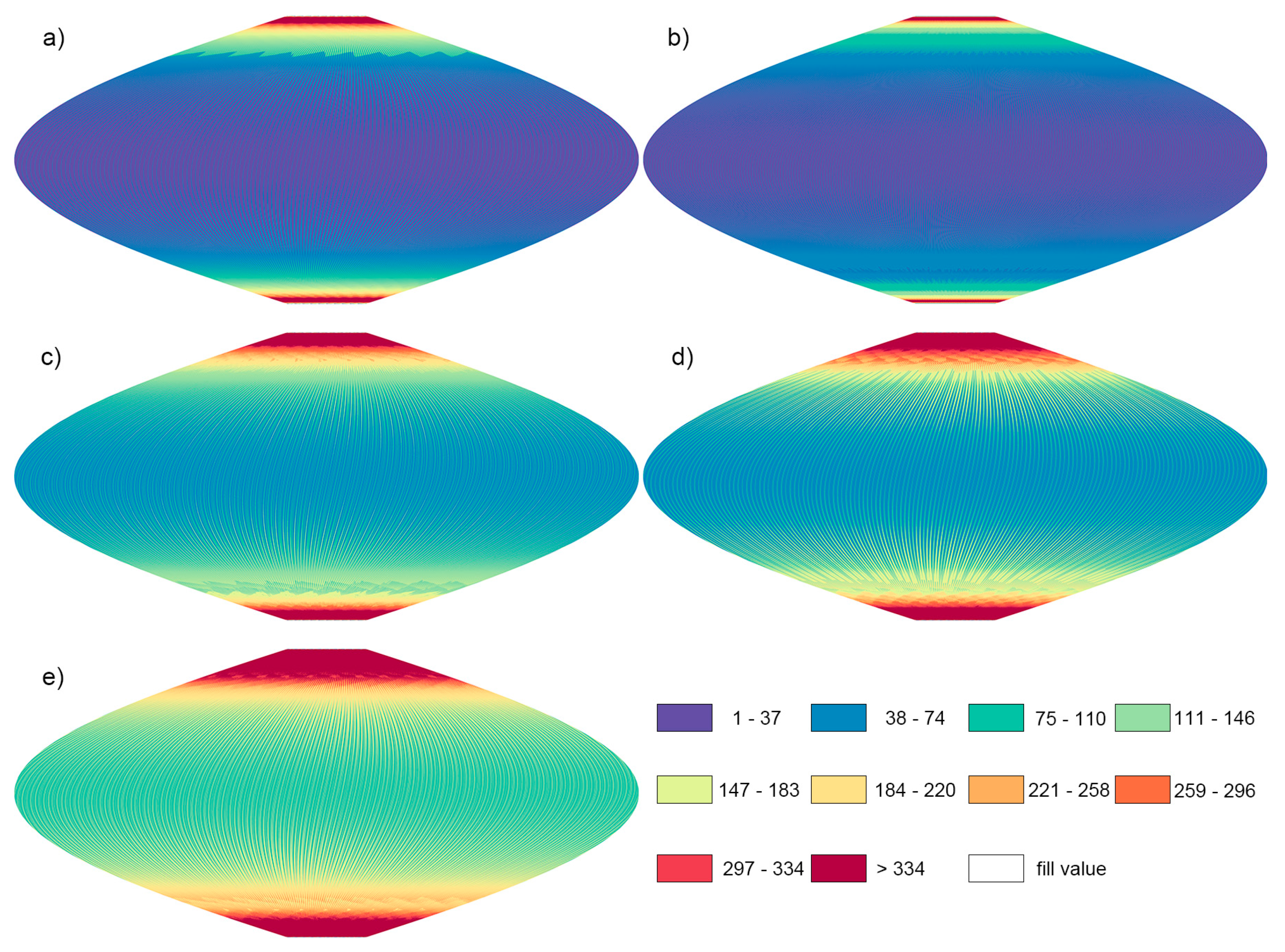
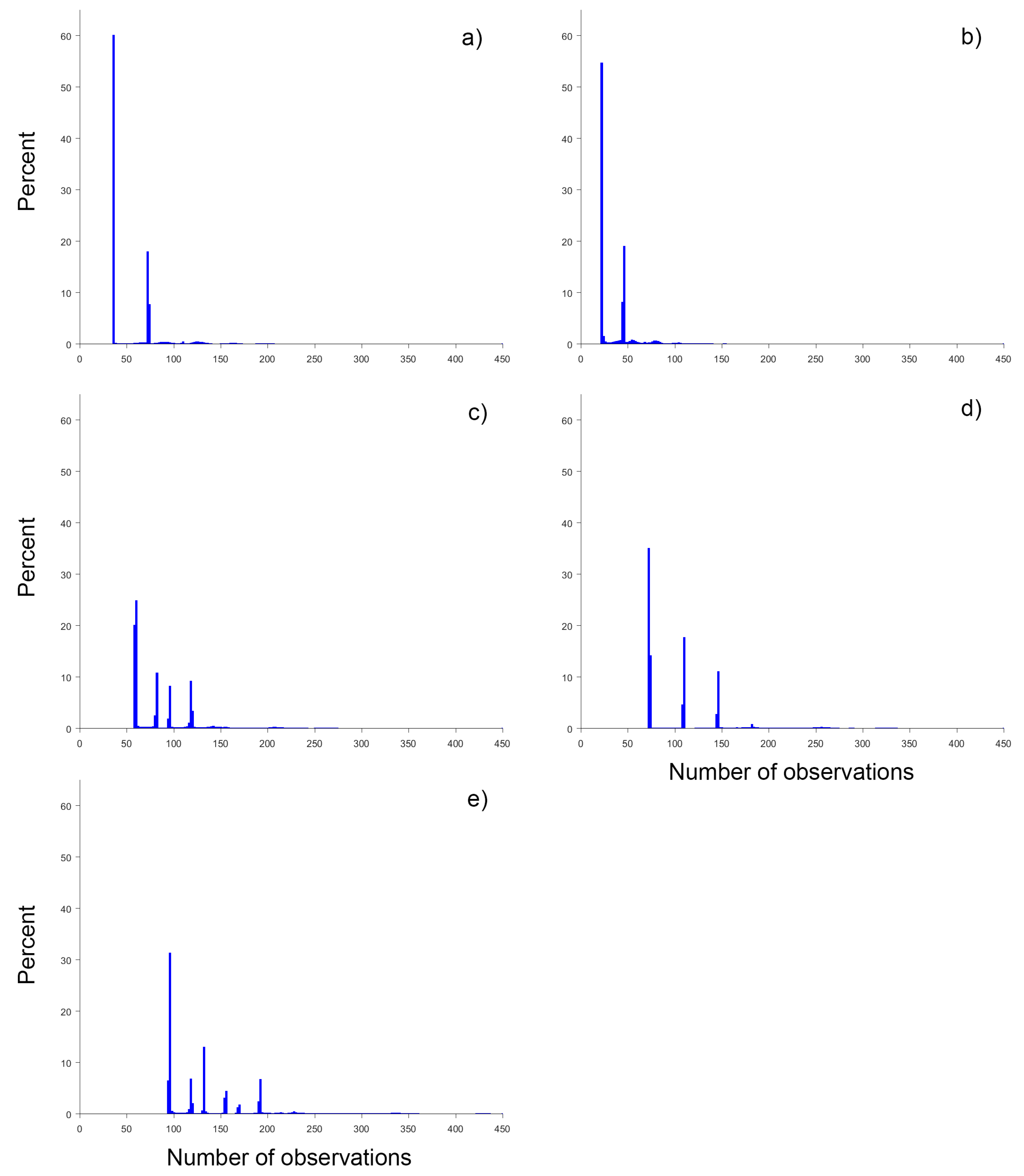
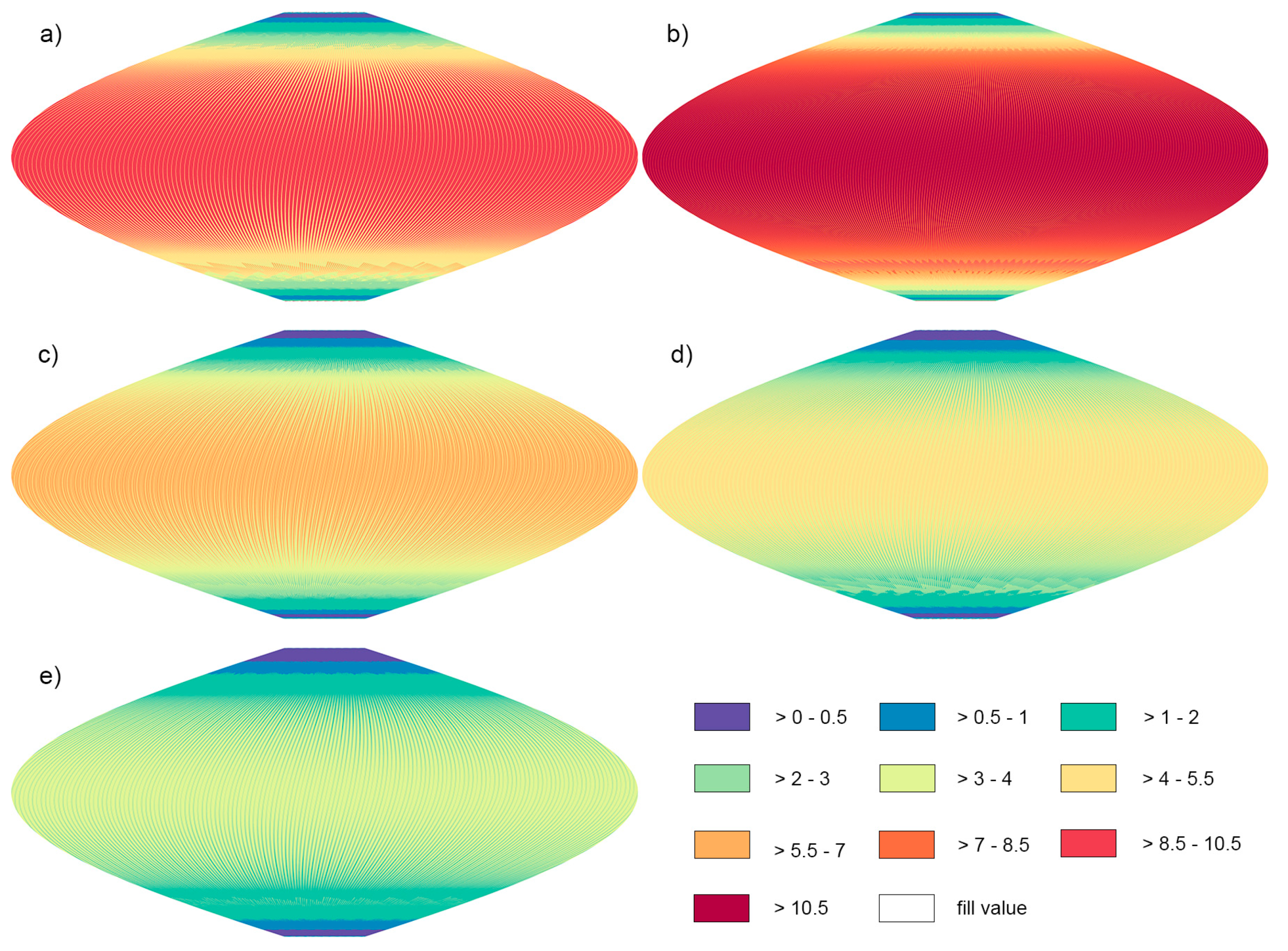
4.1. Annual Number of Observations
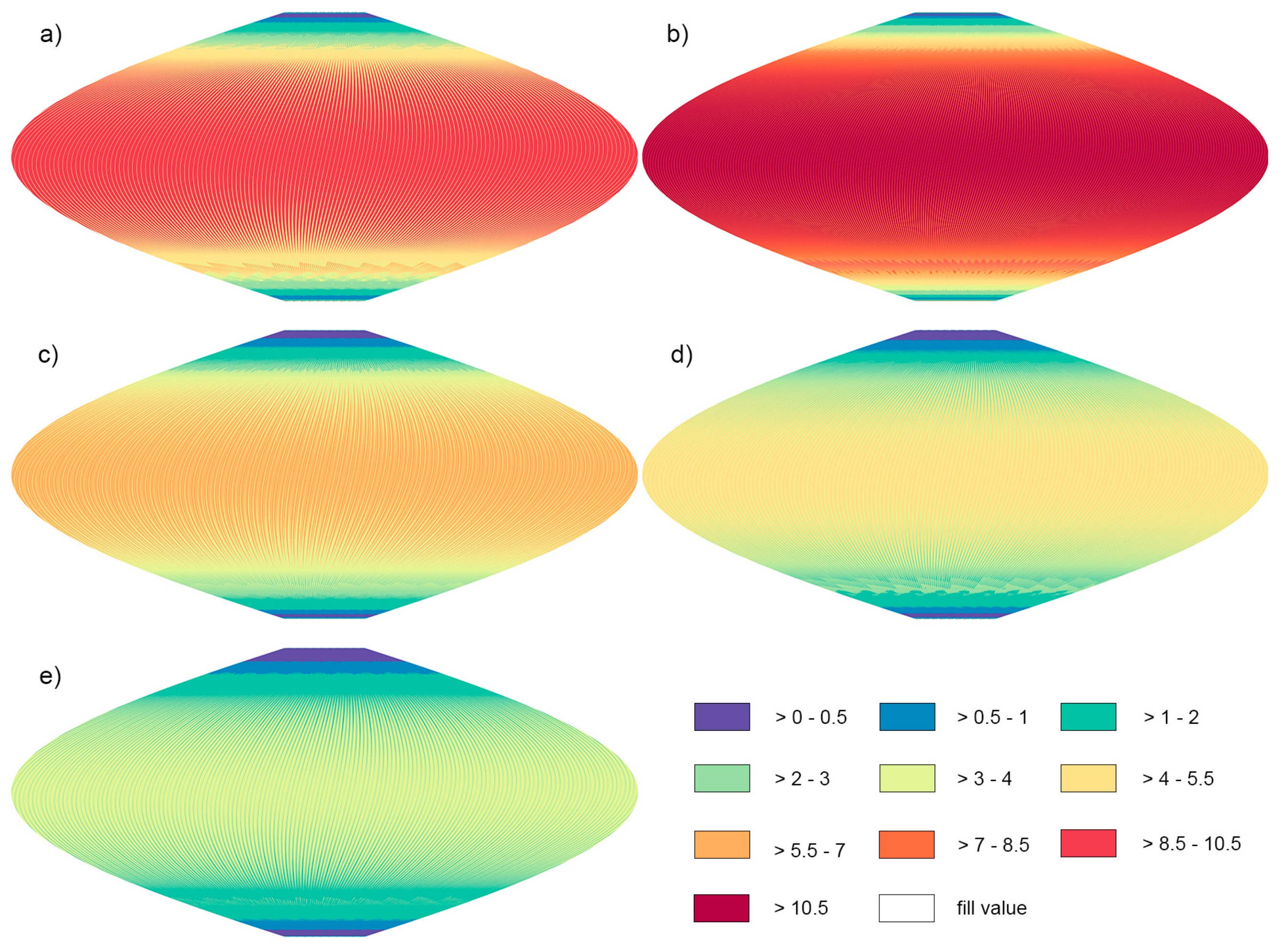
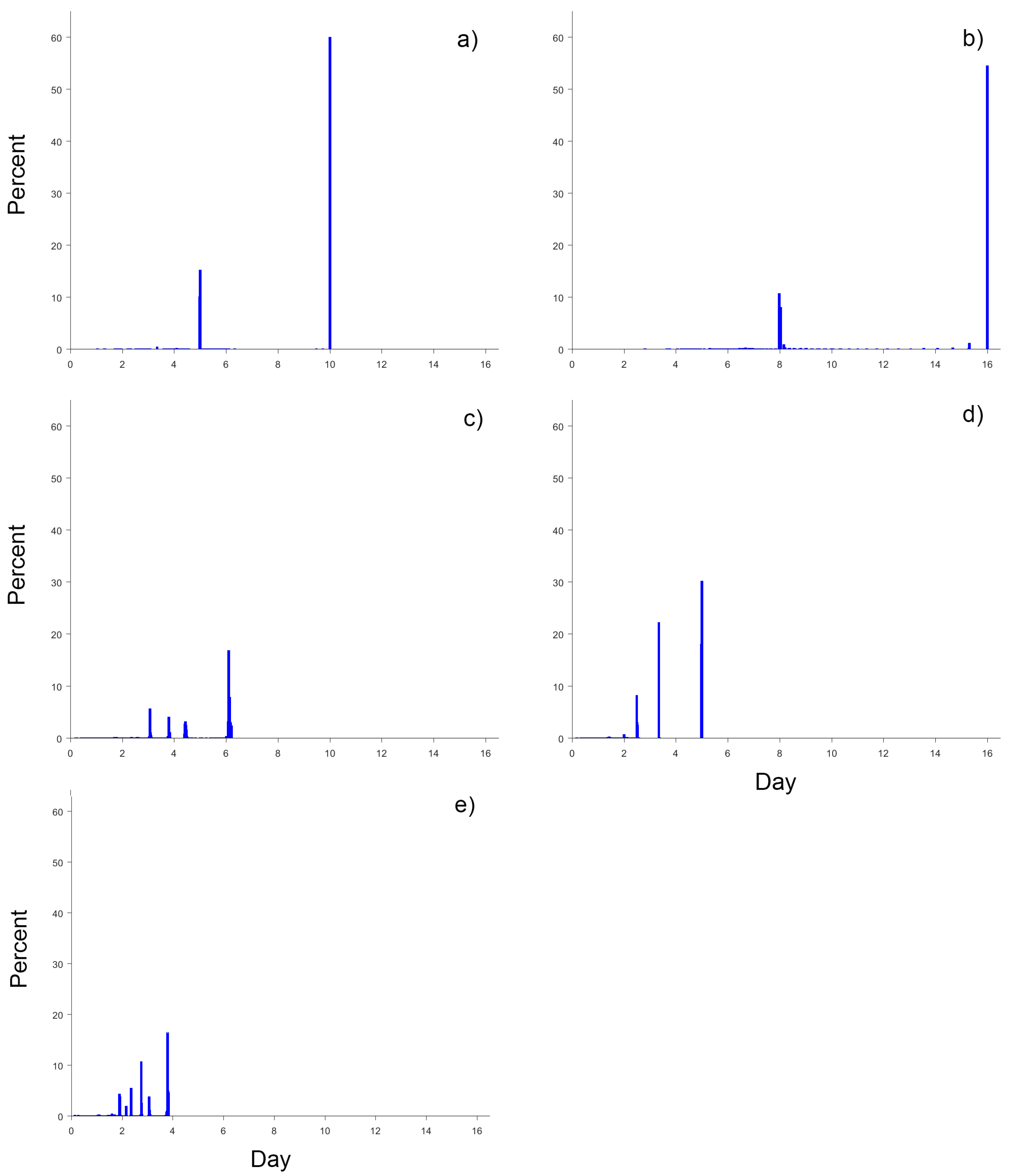
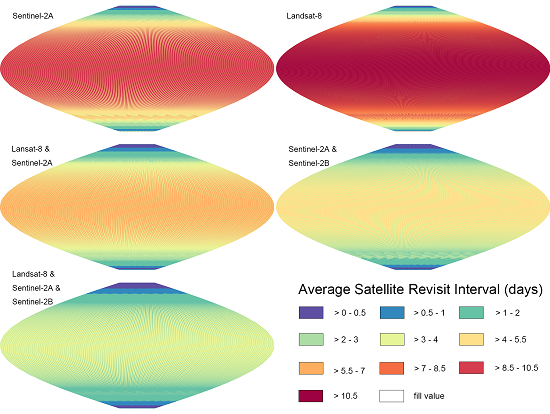
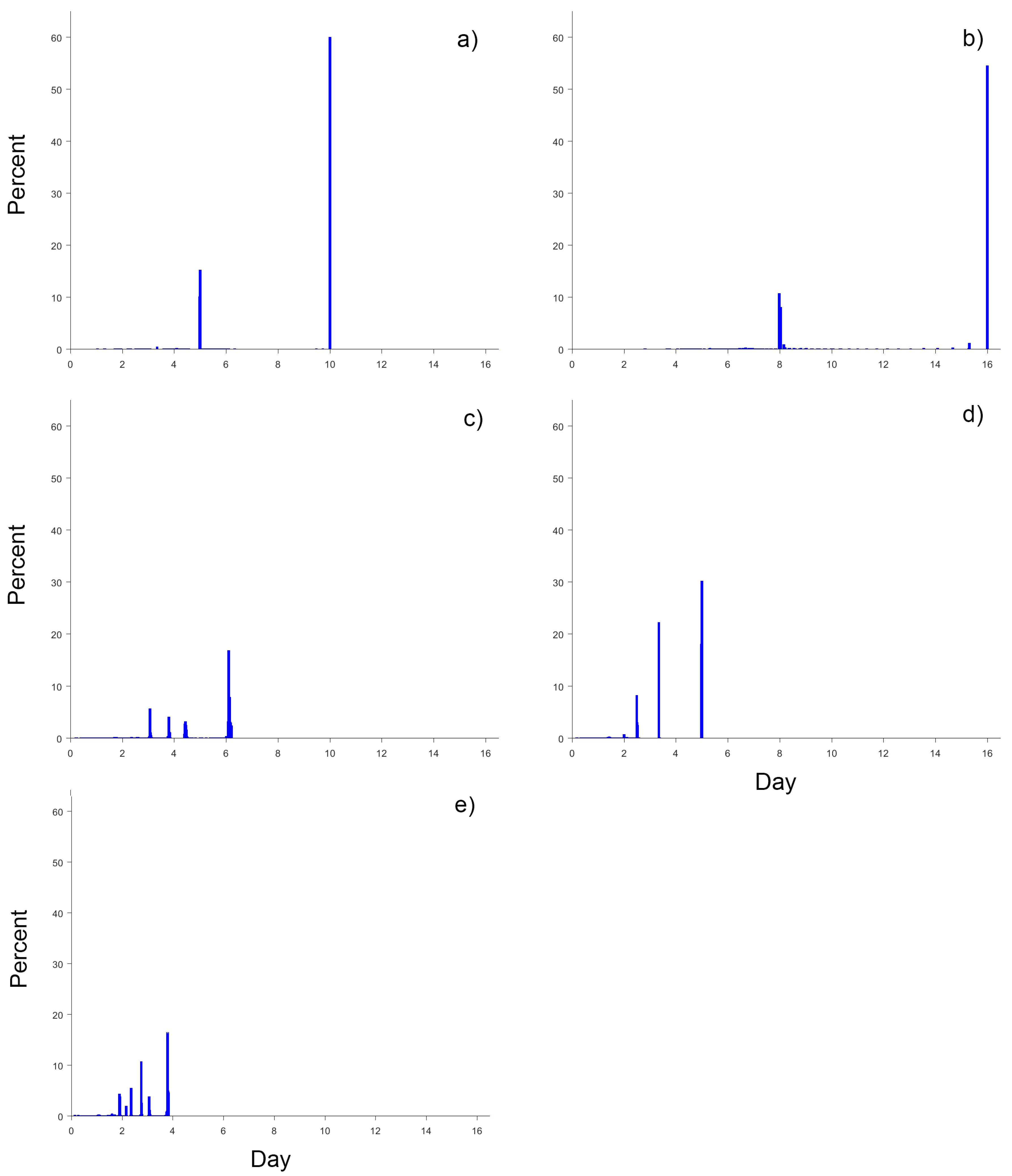
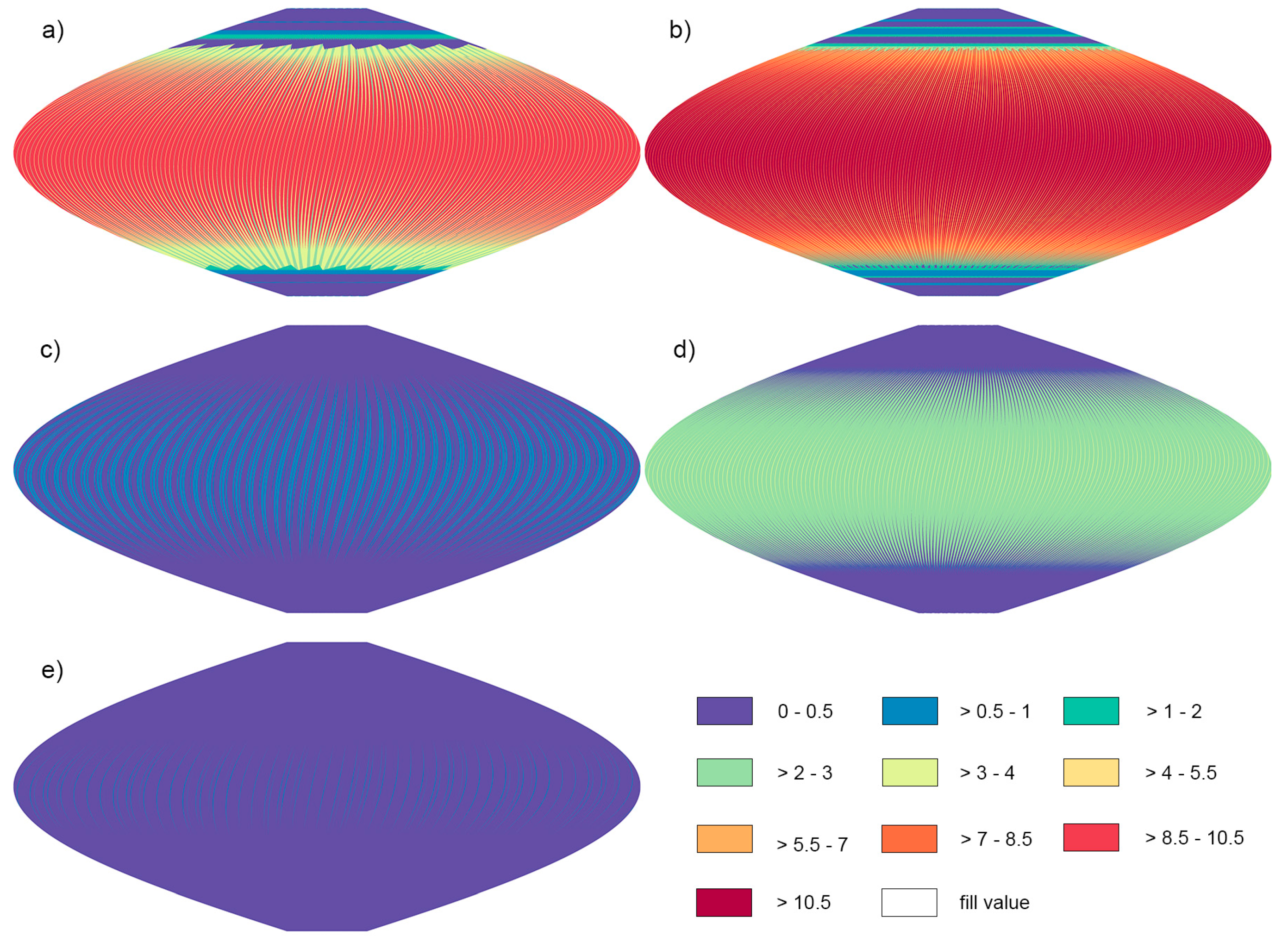
4.2. Average Revisit Intervals
4.3. Minimum Revisit Intervals
4.4. Maximum Revisit Intervals
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Roy, D.P.; Lewis, P.; Schaaf, C.; Devadiga, S.; Boschetti, L. The global impact of cloud on the production of MODIS bi-directional reflectance model based composites for terrestrial monitoring. IEEE Geosci. Remote Sens. Lett. 2006, 3, 452–456. [Google Scholar] [CrossRef]
- Brown, M.E.; Pinzón, J.E.; Didan, K.; Morisette, J.T.; Tucker, C.J. Evaluation of the consistency of long-term NDVI time series derived from AVHRR, SPOT-vegetation, SeaWiFS, MODIS, and Landsat ETM+ sensors. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1787–1793. [Google Scholar] [CrossRef]
- Fensholt, R.; Rasmussen, K.; Nielsen, T.T.; Mbow, C. Evaluation of earth observation based long term vegetation trends—Intercomparing NDVI time series trend analysis consistency of Sahel from AVHRR GIMMS, Terra MODIS and SPOT VGT data. Remote Sens. Environ. 2009, 113, 1886–1898. [Google Scholar] [CrossRef]
- Kovalskyy, V.; Roy, D.P. The global availability of Landsat 5 TM and Landsat 7 ETM+ land surface observations and implications for global 30 m Landsat data product generation. Remote Sens. Environ. 2013, 130, 280–293. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Roy, D.P.; Wulder, M.; Loveland, T.; Woodcock, C.; Allen, R.; Anderson, M.; Helder, D.; Irons, J.; Johnson, D.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Capderou, M. Satellites: Orbits and Missions; Springer: Paris, France, 2005. [Google Scholar]
- Wertz, J.R. Mission Geometry: Orbit and Constellation Design and Management: Spacecraft Orbit and Attitude Systems; Microcosm Press: El Segundo, CA, USA, 2009. [Google Scholar]
- Saboori, B.; Bidgoli, A.M.; Saboori, B. Multiobjective optimization in repeating sun-synchronous orbits design for remote-sensing satellites. J. Aerosp. Eng. 2013, 27, 04014027. [Google Scholar] [CrossRef]
- Sano, E.E.; Ferreira, L.G.; Asner, G.P.; Steinke, E.T. Spatial and temporal probabilities of obtaining cloud-free Landsat images over the Brazilian tropical savanna. Int. J. Remote Sens. 2007, 28, 2739–2752. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally. Remote Sens. Environ. 2008, 112, 1196–1211. [Google Scholar] [CrossRef]
- Kovalskyy, V.; Roy, D.P. A one year Landsat 8 conterminous United States study of cirrus and non-cirrus clouds. Remote Sens. 2015, 7, 564–578. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Loveland, T.R.; Woodcock, C.E.; Belward, A.S.; Cohen, W.B.; Fosnight, G.; Shaw, J.; Masek, J.G.; Roy, D.P. The global Landsat archive: Status, consolidation, and direction. Remote Sens. Environ. 2016, 185, 271–283. [Google Scholar] [CrossRef]
- Whitcraft, A.K.; Becker-Reshef, I.; Killough, B.D.; Justice, C.O. Meeting earth observation requirements for global agricultural monitoring: An evaluation of the revisit capabilities of current and planned moderate resolution optical earth observing missions. Remote Sens. 2015, 7, 1482–1503. [Google Scholar] [CrossRef]
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Digital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Roy, D.P.; Jin, Y.; Lewis, P.E.; Justice, C.O. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ. 2005, 97, 137–162. [Google Scholar] [CrossRef]
- Verbesselt, J.; Hyndman, R.; Newnham, G.; Culvenor, D. Detecting trend and seasonal changes in satellite image time series. Remote Sens. Environ. 2010, 114, 106–115. [Google Scholar] [CrossRef]
- Zhu, Z. Change detection using landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 and Landsat 8 Imagery for a Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, H.K.; Roy, D.P.; Yan, L.; Huang, H.; Li, J. Landsat 15 m panchromatic assisted downscaling (LPAD) of 30 m reflective wavelength data to Sentinel-2 20 m resolution. Remote Sens. 2017, 9, 755. [Google Scholar]
- Kessler, P.D.; Killough, B.D.; Gowda, S.; Williams, B.R.; Chander, G.; Qu, M. CEOS Visualization Environment (COVE) Tool for Intercalibration of Satellite Instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1081–1087. [Google Scholar] [CrossRef]
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat data continuity mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]
- European Space Agency (ESA). Sentinel-2 User Handbook; Revision 2; ESA Standard Document; ESA: Paris, France, 2015; 64p. [Google Scholar]
- Snyder, J.P. Flattening the Earth: Two Thousand Years of Map Projections; The University of Chicago Press: Chicago, IL, USA, 1993. [Google Scholar]
- O’Rourke, J. Computational Geometry in C, 2nd ed.; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Knuth, D.E. The Art of Computer Programming: Sorting and Searching, 2nd ed.; Addison-Wesley: Reading, MA, USA, 1998; Volume 3. [Google Scholar]
- Loveland, T.R.; Irons, J.R. Landsat 8: The plans, the reality, and the legacy. Remote Sens. Environ. 2016, 185, 1–6. [Google Scholar] [CrossRef]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef]
- Storey, J.; Choate, M.; Lee, K. Landsat 8 Operational Land Imager on-orbit geometric calibration and performance. Remote Sens. 2014, 6, 11127–11152. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P. Landsat 5 Thematic Mapper reflectance and NDVI 27-year time series inconsistencies due to satellite orbit change. Remote Sens. Environ. 2016, 186, 217–233. [Google Scholar] [CrossRef]
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A note on the temporary mis-registration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar]
- Teillet, P.M.; Barker, J.L.; Markham, B.L.; Irish, R.R.; Fedosejevs, G.; Storey, J.C. Radiometric cross-calibration of the Landsat-7 ETM+ and Landsat-5 TM sensors based on tandem data sets. Remote Sens. Environ. 2001, 78, 39–54. [Google Scholar] [CrossRef]
- Mishra, N.; Haque, M.O.; Leigh, L.; Aaron, D.; Helder, D.; Markham, B. Radiometric cross calibration of Landsat 8 operational land imager (OLI) and Landsat 7 enhanced thematic mapper plus (ETM+). Remote Sens. 2014, 6, 12619–12638. [Google Scholar] [CrossRef]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef]
- Holden, C.E.; Woodcock, C.E. An analysis of Landsat 7 and Landsat 8 underflight data and the implications for time series investigations. Remote Sens. Environ. 2016, 185, 16–36. [Google Scholar] [CrossRef]
- Roy, D.P.; Zhang, H.K.; Ju, J.; Gomez-Dans, J.L.; Lewis, P.E.; Schaaf, C.B.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L.; Huang, H.; Li, Z. Examination of Sentinel-2A multi-1 spectral instrument (MSI) reflectance anisotropy and the suitability of a general method to normalize MSI reflectance to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2017, 199, 25–38. [Google Scholar] [CrossRef]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Landsat-8 | Sentinel-2A | Sentinel-2B | Landsat-8 Sentinel-2A | Landsat-8 Sentinel-2B | Sentinel-2A Sentinel-2B | Landsat-8 Sentinel-2A Sentinel-2B | |
|---|---|---|---|---|---|---|---|
| Mean | 39.8 | 61.6 | 61.3 | 101.4 | 101.0 | 122.9 | 162.6 |
| Median | 23 | 37 | 37 | 81 | 81 | 100 | 127 |
| most frequent total value | 23 (47.9%) | 37 (35.9%) | 37 (36.3%) | 60 (24.2%) | 60 (23.6%) | 73 (30.2%) | 96 (21.1%) |
| 2nd most frequent total value | 46 (18.8%) | 73 (15.3%) | 73 (15.1%) | 119 (6.4%) | 119 (6.8%) | 110 (17.7%) | 133 (9.6%) |
| 3rd most frequent total value | 54 (0.8%) | 110 (0.4%) | 110 (0.4%) | 82 (0.2%) | 82 (0.2%) | 146 (0.3%) | 118 (0.1%) |
| Landsat-8 | Sentinel-2A | Sentinel-2B | Landsat-8 Sentinel-2A | Landsat-8 Sentinel-2B | Sentinel-2A Sentinel-2B | Landsat-8 Sentinel-2A Sentinel-2B | |
|---|---|---|---|---|---|---|---|
| Mean | 12.130 | 7.771 | 7.820 | 4.593 | 4.611 | 3.795 | 2.835 |
| Median | 16.000 | 10.000 | 10.000 | 4.456 | 4.456 | 3.667 | 2.858 |
| most frequent total value | 16.000 (54.6%) | 10.000 (55.5%) | 10.000 (56.6%) | 6.097 (14.8%) | 6.097 (14.9%) | 5.000 (29.0%) | 3.792 (11.8%) |
| 2nd most frequent total value | 7.972 (10.7%) | 5.000 (14.0%) | 5.000 (15.1%) | 3.055 (1.8%) | 3.055 (2.1%) | 3.333 (13.6%) | 2.750 (3.1%) |
| 3rd most frequent total value | 15.306 (1.1%) | 3.333 (0.5%) | 3.333 (0.5%) | 3.800 (0.1%) | 3.800 (0.1%) | 2.486 (0.2%) | 2.347 (0.2%) |
| Landsat-8 | Sentinel-2A | Sentinel-2B | Landsat-8 Sentinel-2A | Landsat-8 Sentinel-2B | Sentinel-2A Sentinel-2B | Landsat-8 Sentinel-2A Sentinel-2B | |
|---|---|---|---|---|---|---|---|
| Mean | 11.101 | 6.931 | 7.038 | 5 h, 31 min | 5 h, 48 min | 2.209 | 35 min |
| Median | 15.958 | 9.958 | 9.958 | 17 min | 17 min | 2.965 | 14 min |
| most frequent total value | 15.958 (48.7%) | 9.958 (58.9%) | 9.958 (61.6%) | 16 min (5.6%) | 16 min (5.7%) | 3.000 (37.2%) | 12 min (9.0%) |
| 2nd most frequent total value | 7.000 (19.2%) | 3.000 (15.9%) | 3.000 (15.7%) | 1.000 (2.8%) | 1.000 (2.9%) | 12 min (16.5%) | 0.986 (0.31%) |
| 3rd most frequent total value | 1.986 (3.1%) | 0.347 (2.5%) | 0.347 (2.5%) | 3.000 (0.0%) | 3.000 (0.0%) | 4.000 (1.9%) | 2.931 (0.0%) |
| Landsat-8 | Sentinel-2A | Sentinel-2B | Landsat-8 Sentinel-2A | Landsat-8 Sentinel-2B | Sentinel-2A Sentinel-2B | Landsat-8 Sentinel-2A Sentinel-2B | |
|---|---|---|---|---|---|---|---|
| Mean | 14.092 | 9.680 | 9.680 | 9.545 | 9.531 | 6.570 | 6.560 |
| Median | 16.042 | 10.042 | 10.042 | 10.000 | 10.000 | 7.001 | 7.001 |
| most frequent total value | 16.042 (56.8%) | 10.042 (59.9%) | 10.042 (61.7%) | 10.000 (25.8%) | 10.000 (28.7%) | 7.042 (28.6%) | 7.000 (26.0%) |
| 2nd most frequent total value | 9.042 (13.2%) | 7.028 (17.7%) | 7.028 (16.4%) | 6.986 (16.0%) | 6.986 (15.4%) | 4.000 (20.6%) | 4.000 (24.4%) |
| 3rd most frequent total value | 7.042 (1.9%) | 3.986 (1.8%) | 3.986 (1.8%) | 9.000 (5.9%) | 9.000 (5.9%) | 3.042 (3.1%) | 6.0 (2.6%) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. https://doi.org/10.3390/rs9090902
Li J, Roy DP. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sensing. 2017; 9(9):902. https://doi.org/10.3390/rs9090902
Chicago/Turabian StyleLi, Jian, and David P. Roy. 2017. "A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring" Remote Sensing 9, no. 9: 902. https://doi.org/10.3390/rs9090902
APA StyleLi, J., & Roy, D. P. (2017). A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sensing, 9(9), 902. https://doi.org/10.3390/rs9090902