Fabrication of Electromagnetically-Driven Tilted Microcoil on Polyimide Capillary Surface for Potential Single-Fiber Endoscope Scanner Application

Abstract
:1. Introduction
2. Design and Simulation
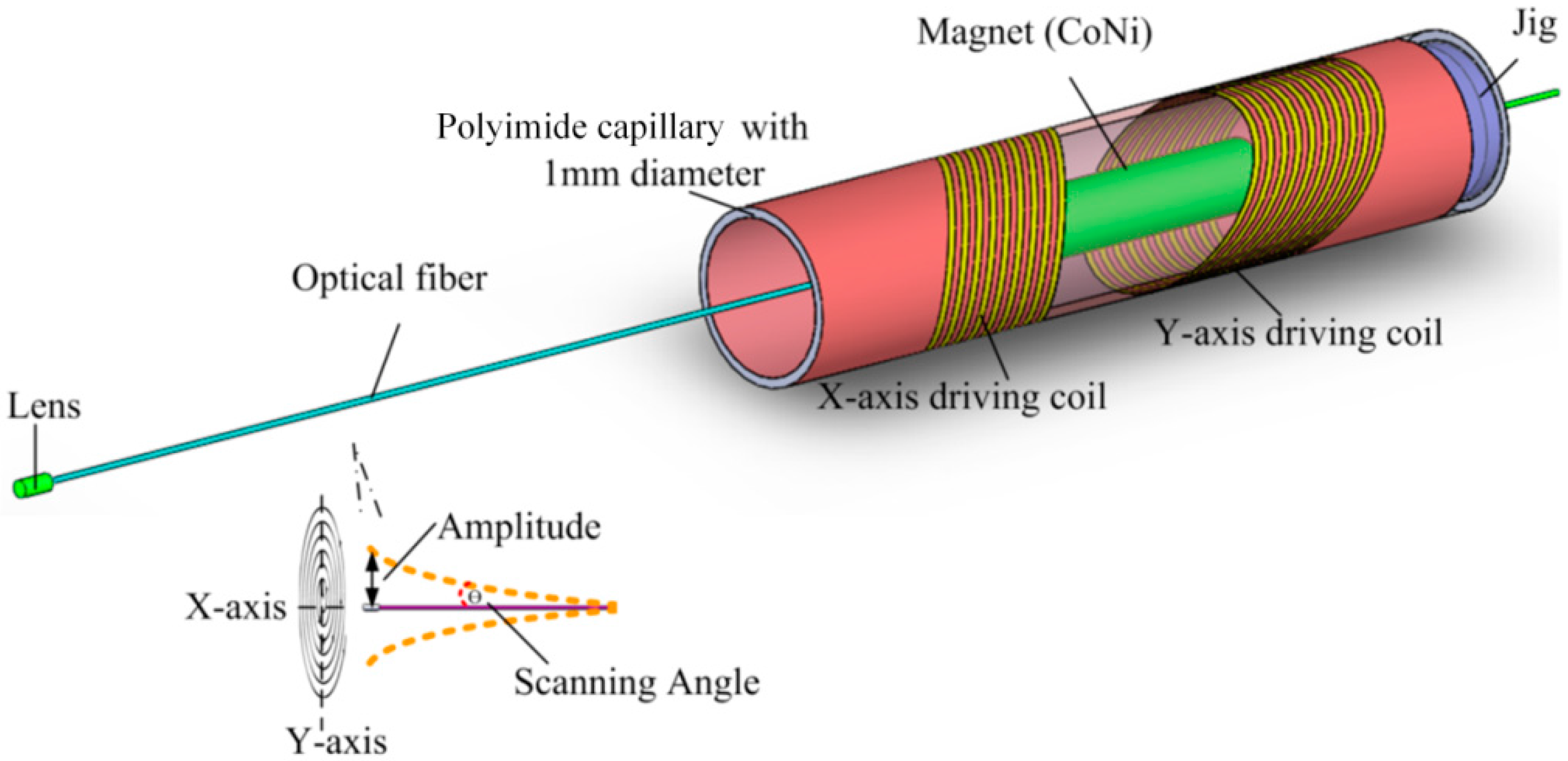
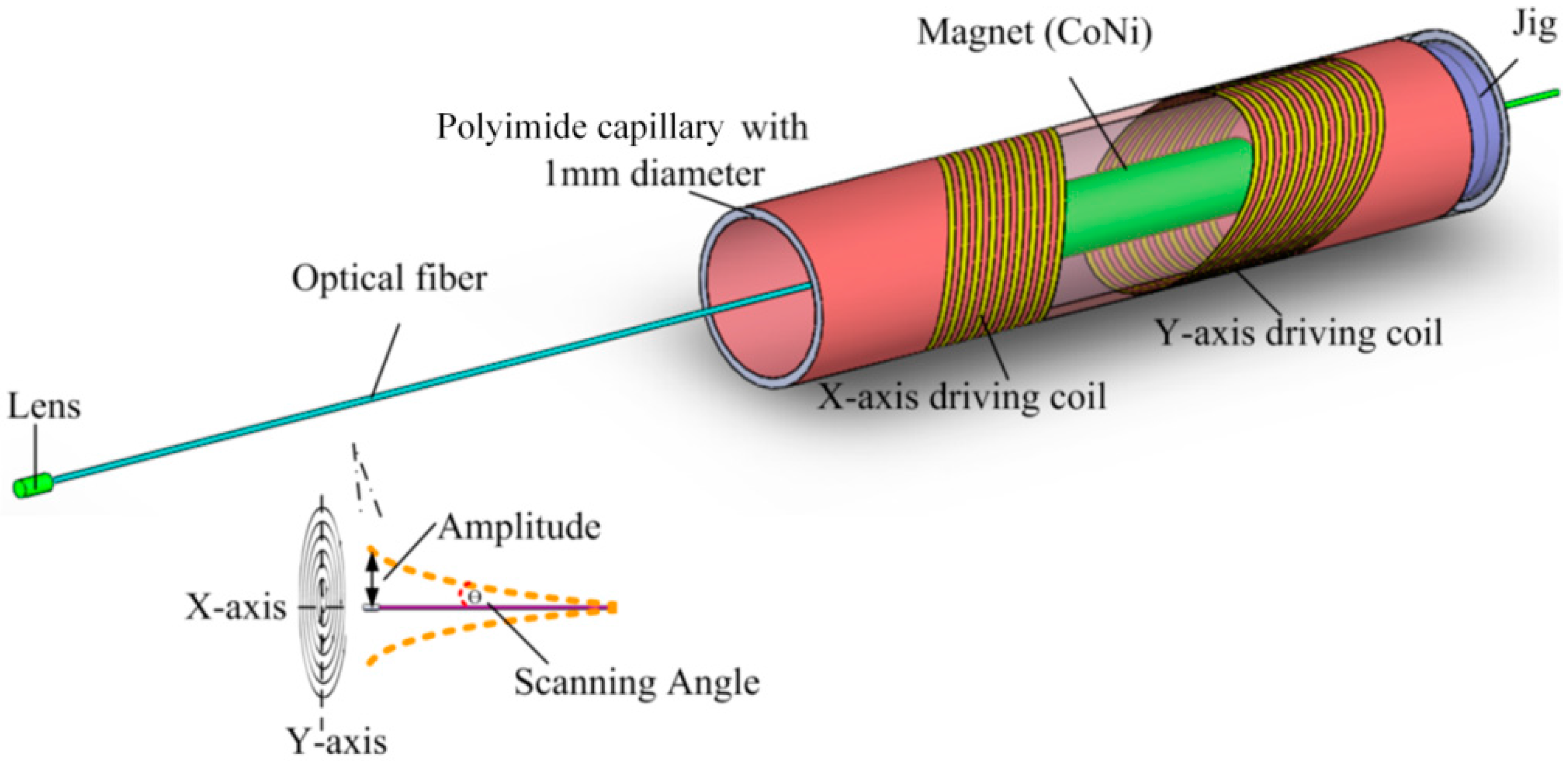
2.1. Single-Fiber Scanner
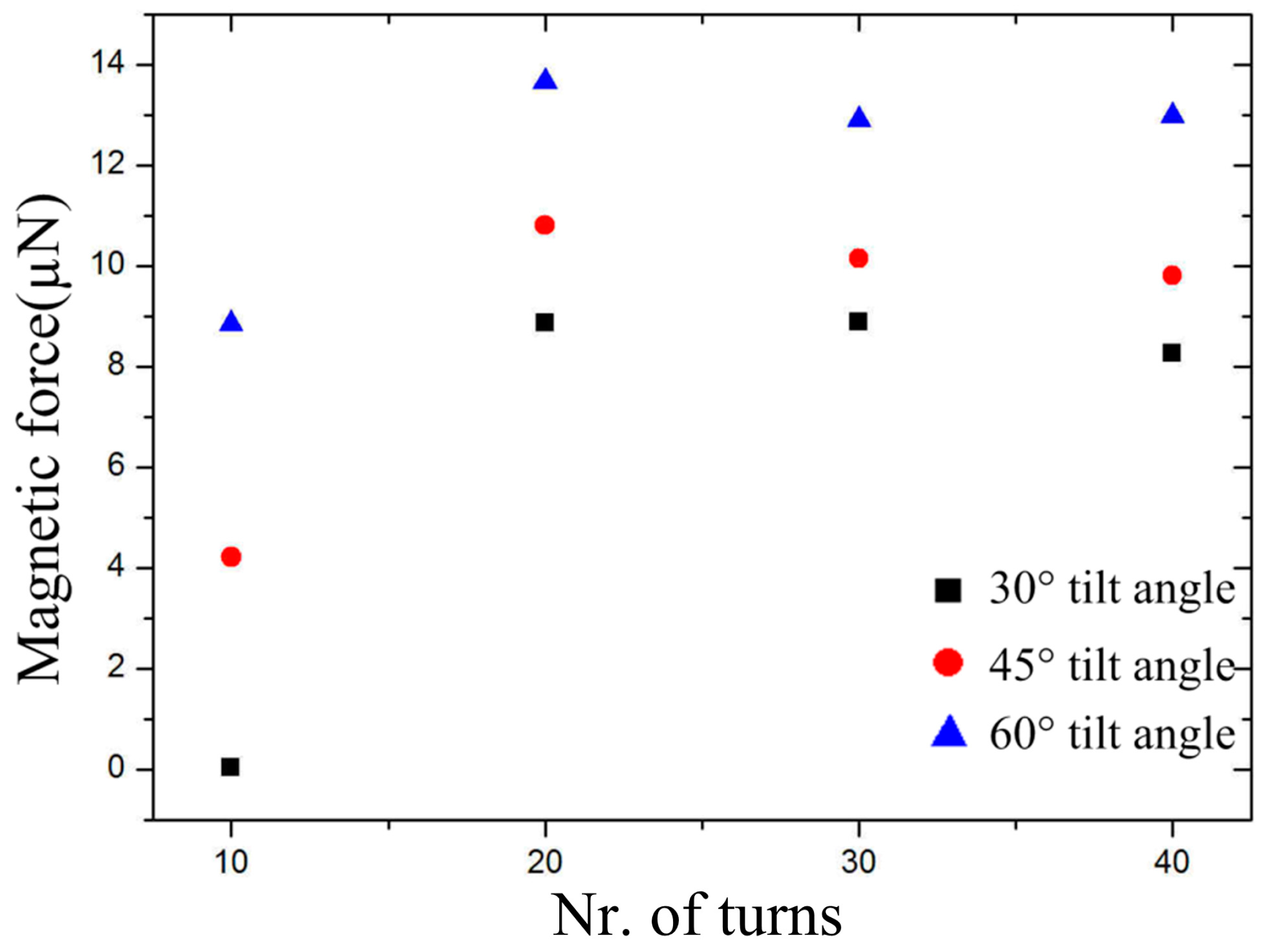
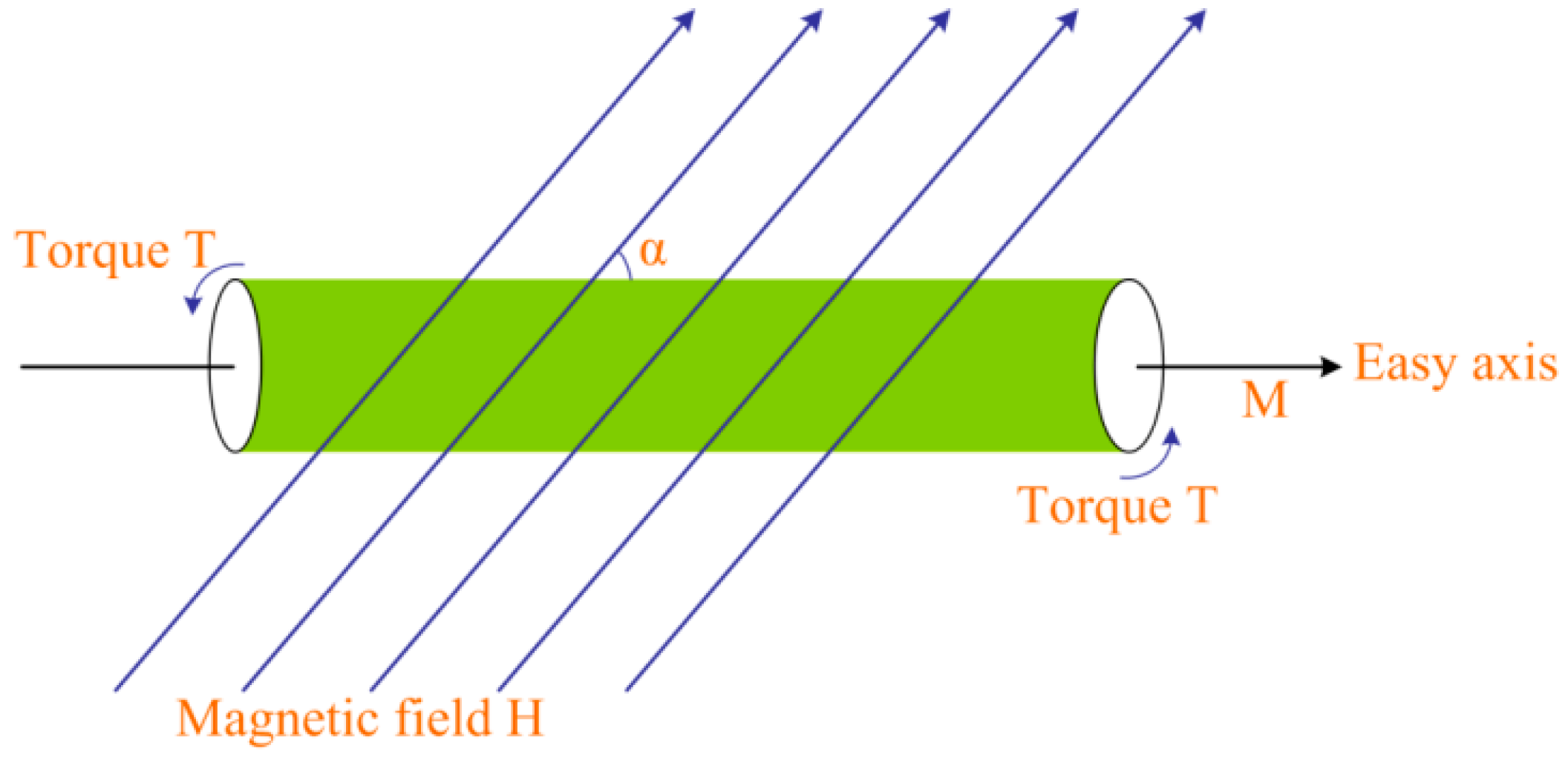
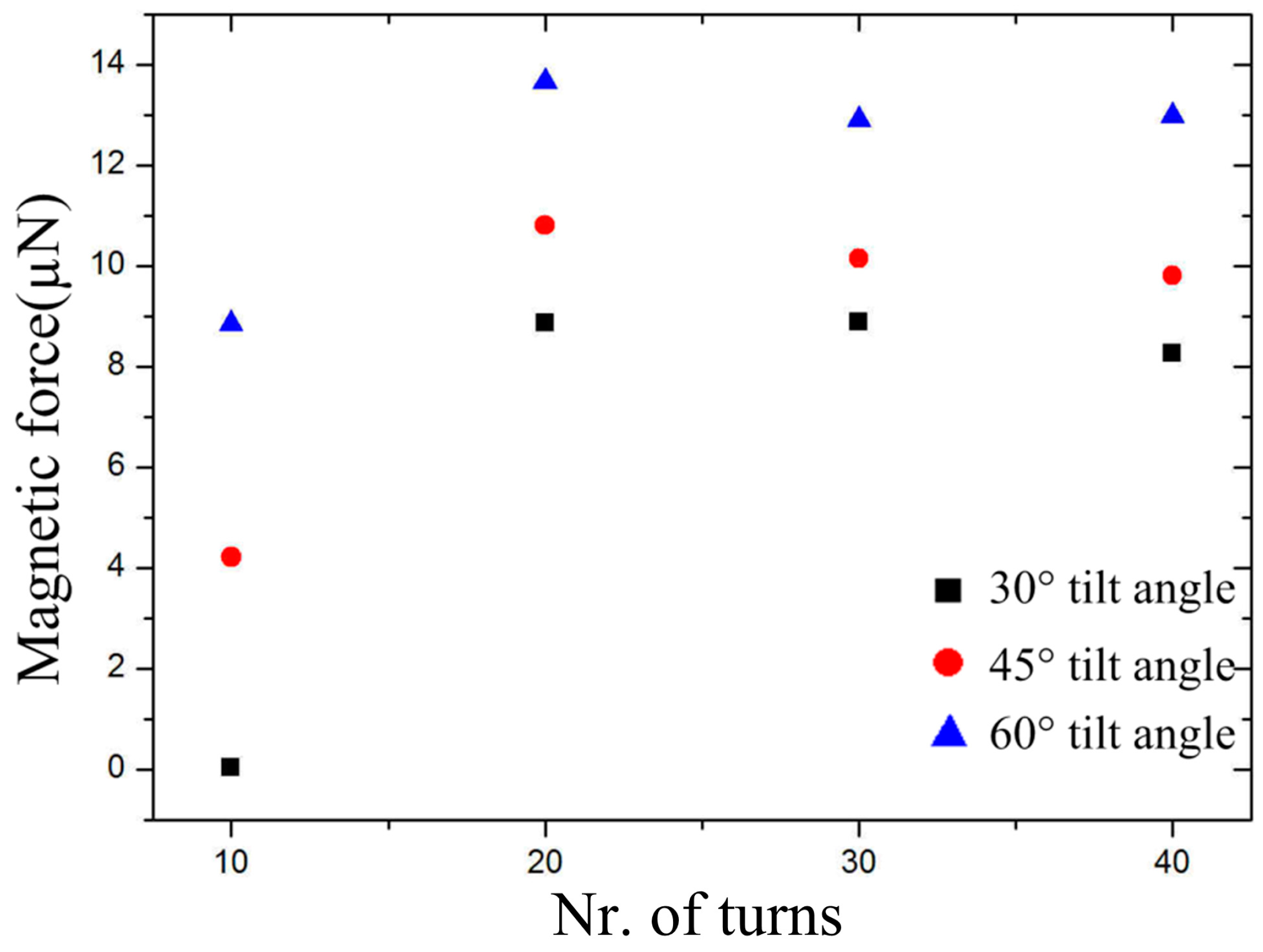
2.2. Design of Tilted Microcoil
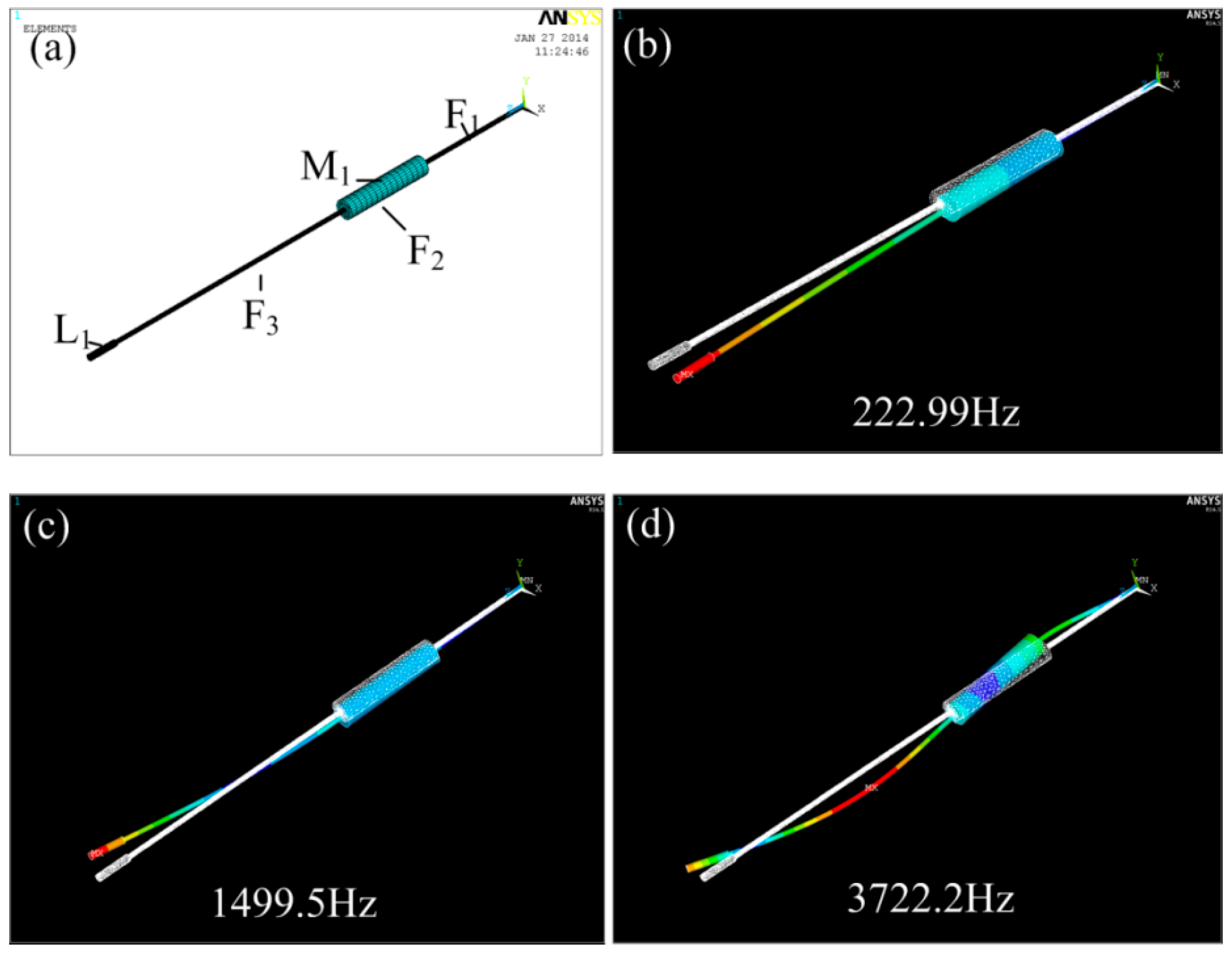
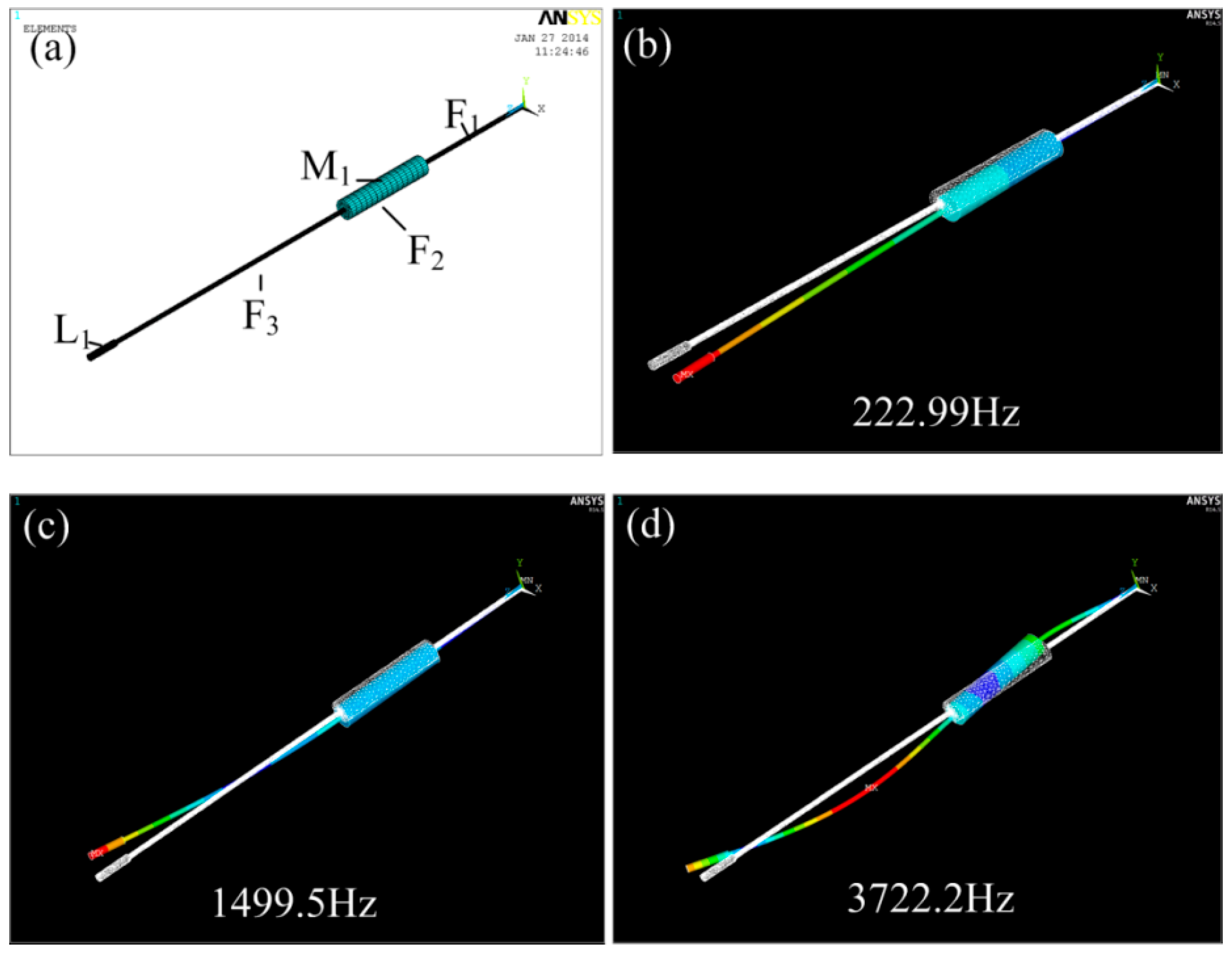
2.3. The Modal and Dynamic Analysis
3. Fabrication of Tilted Microcoil
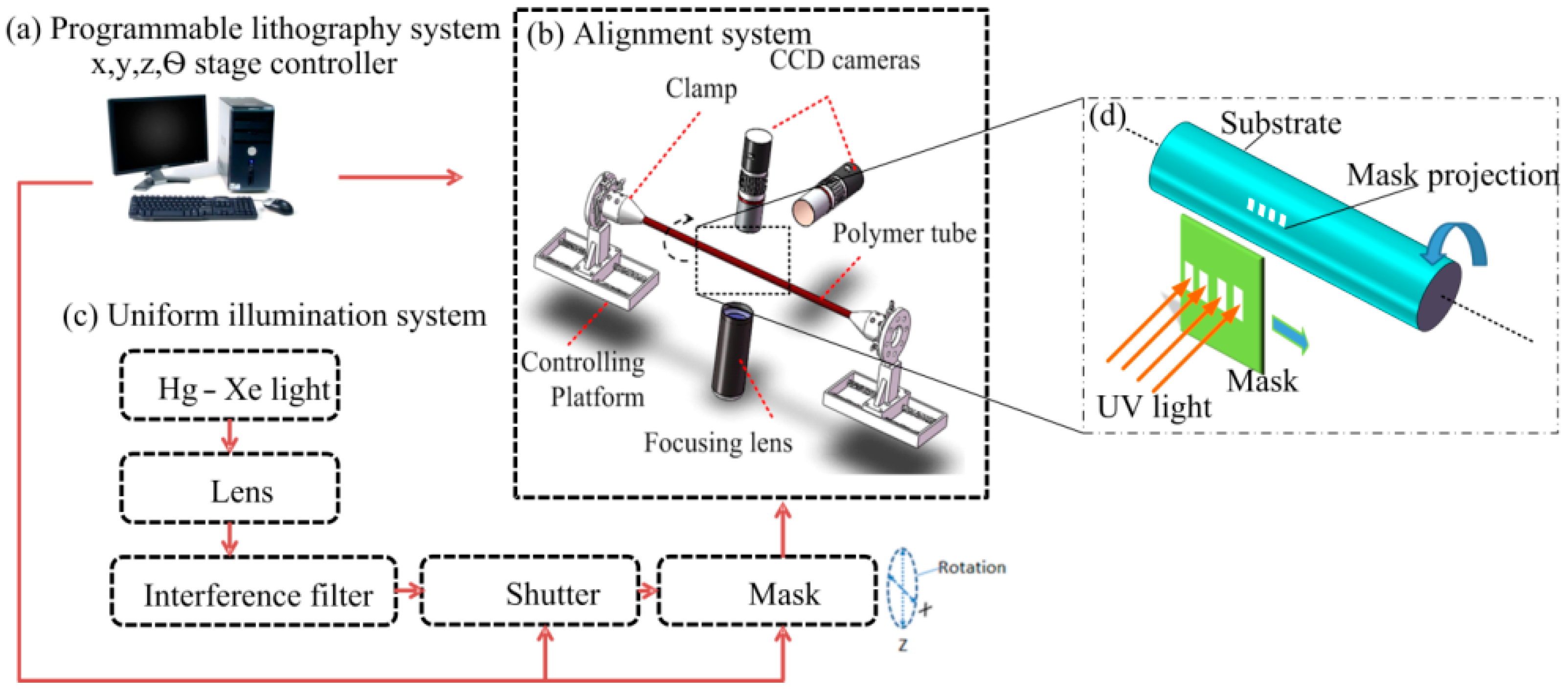
3.1. Exposure System
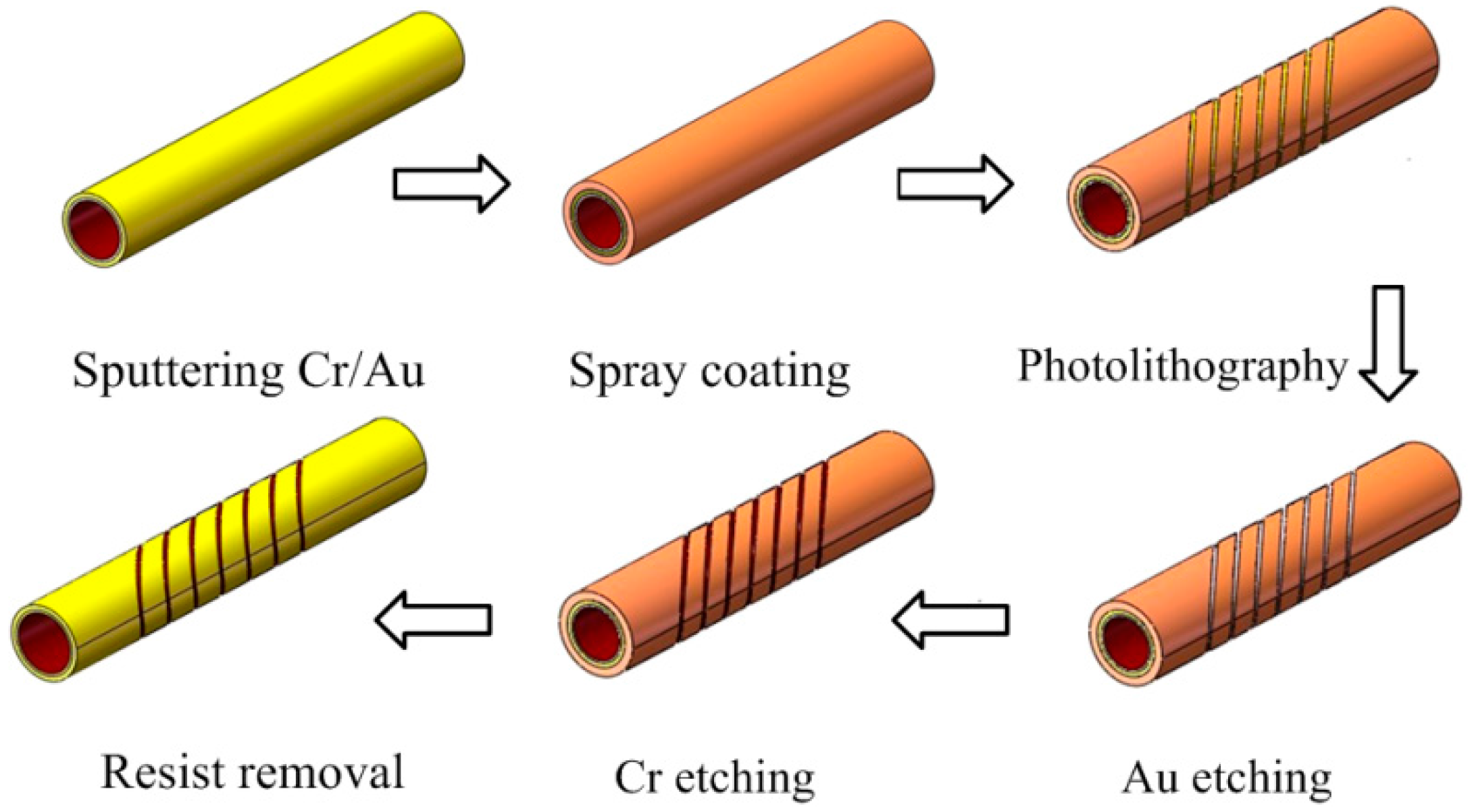
3.2. Fabrication Process
4. Characterization
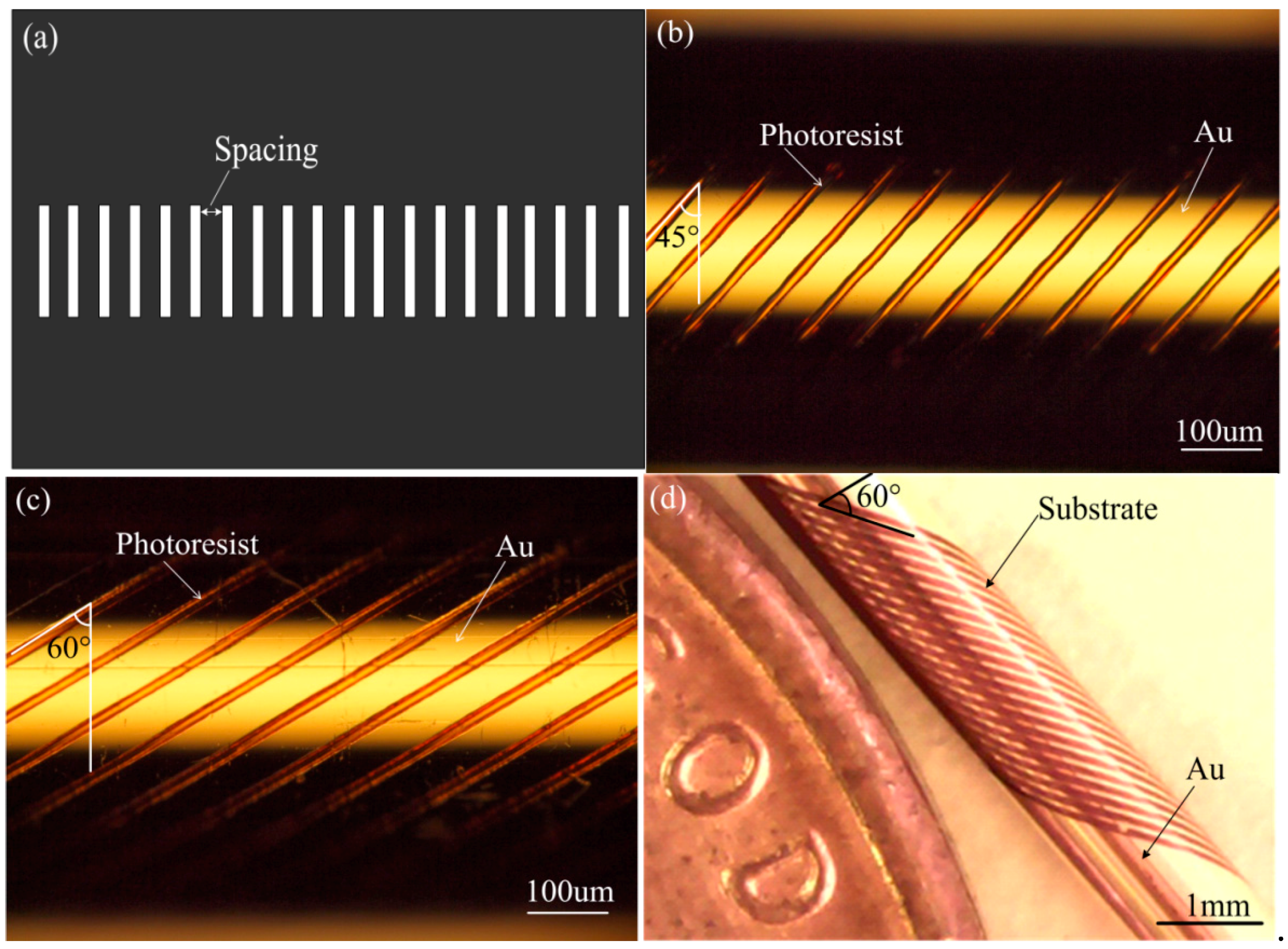
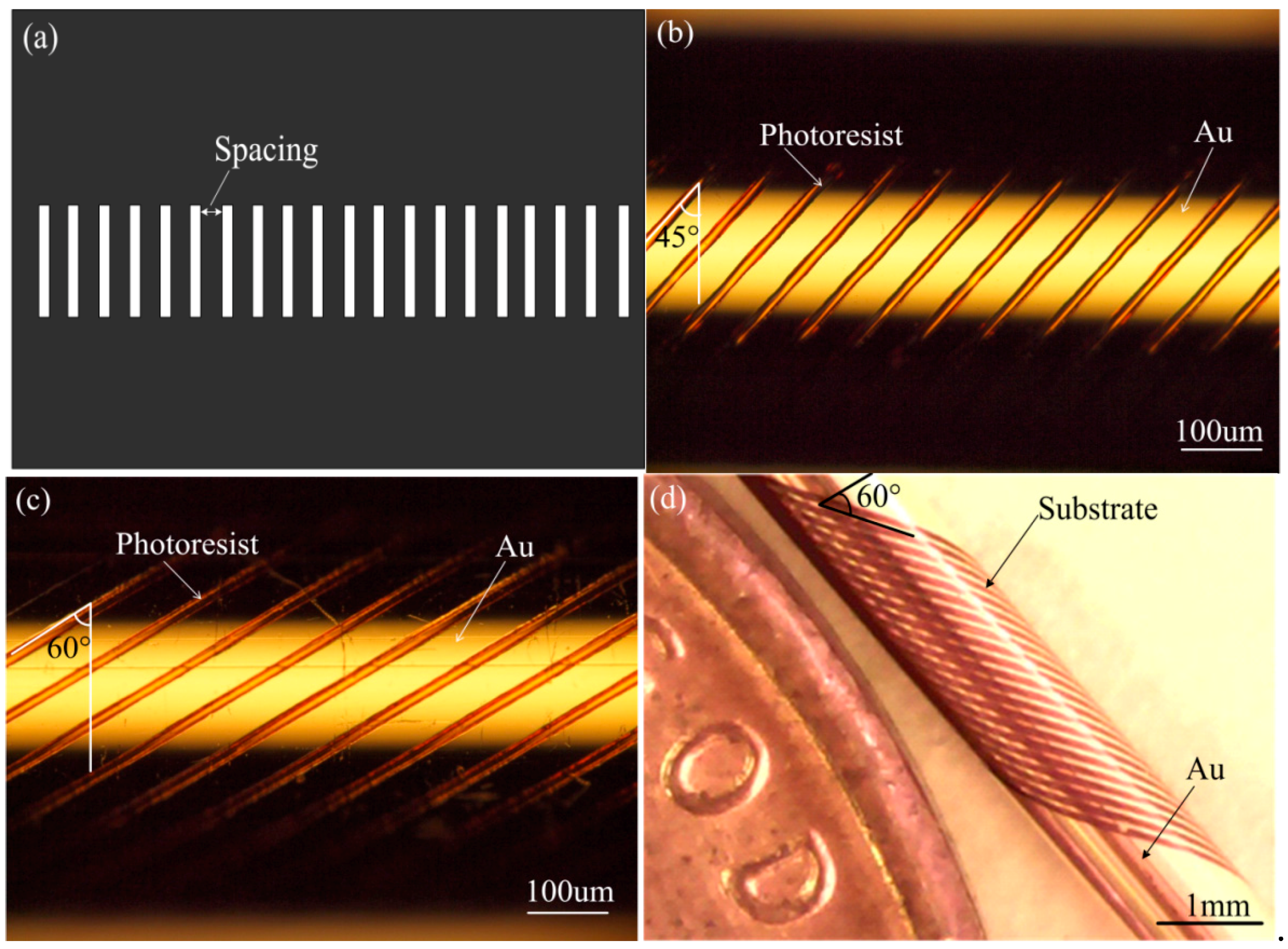
4.1. Characteristics of Tilted Microcoil Patterns
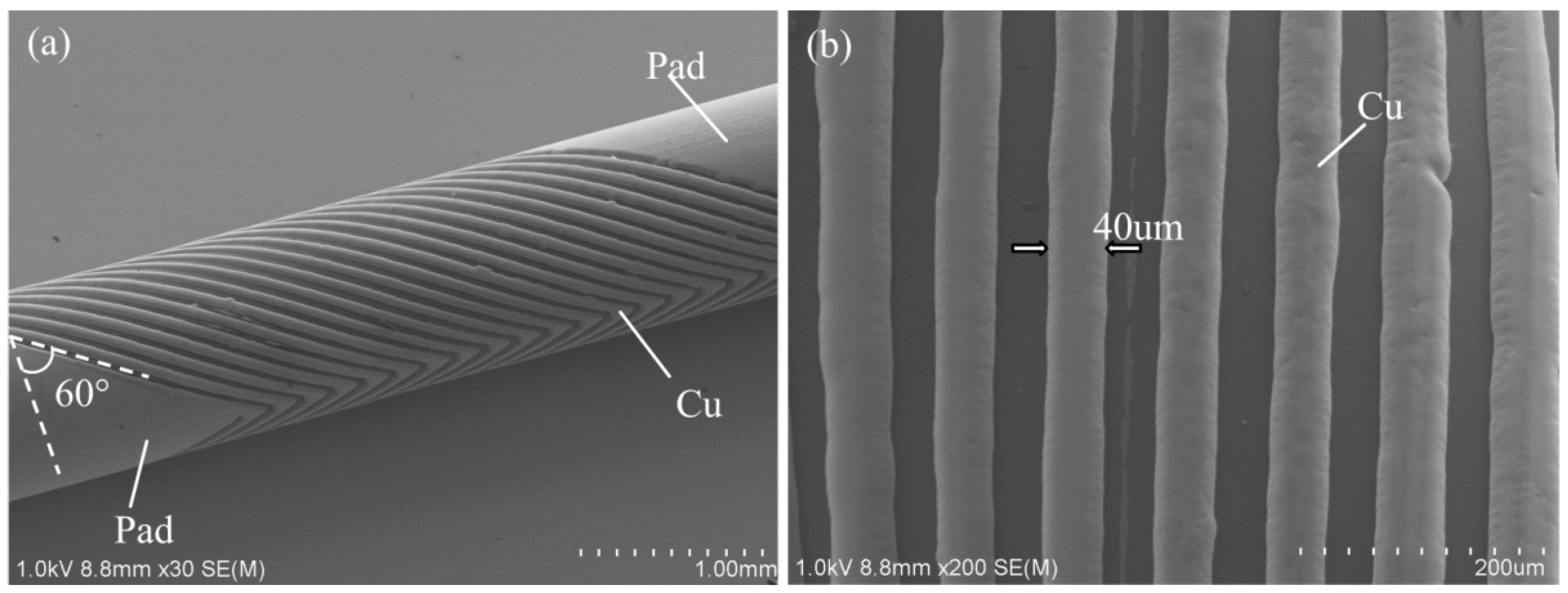
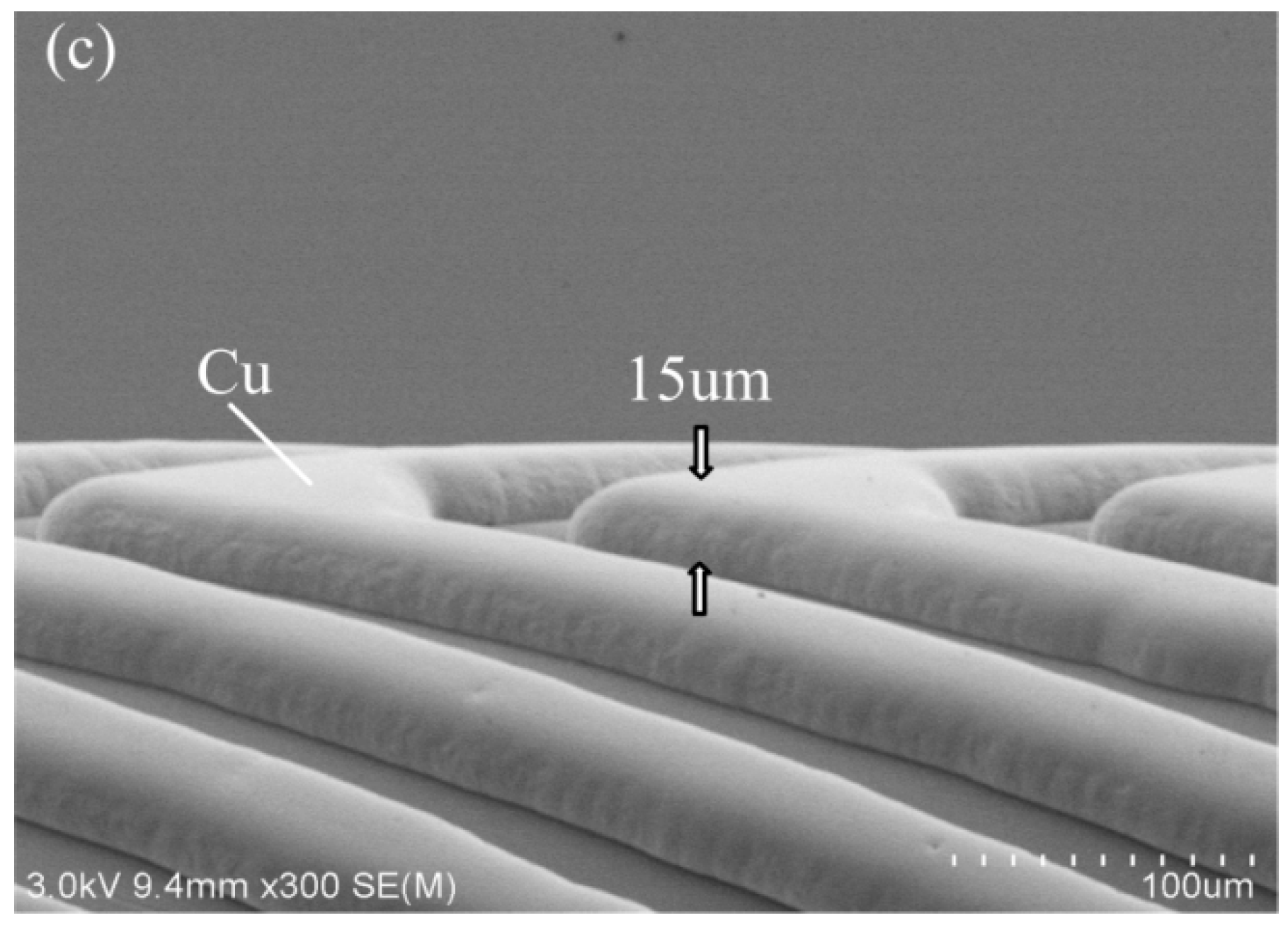
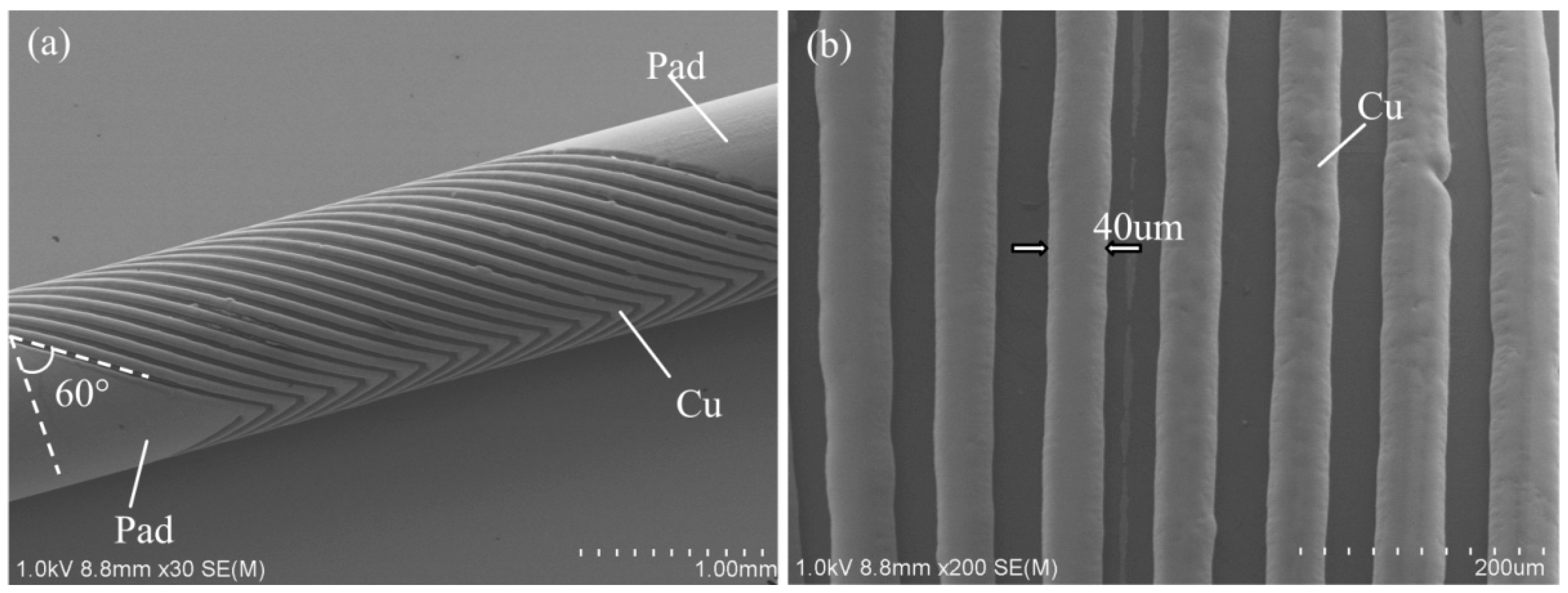
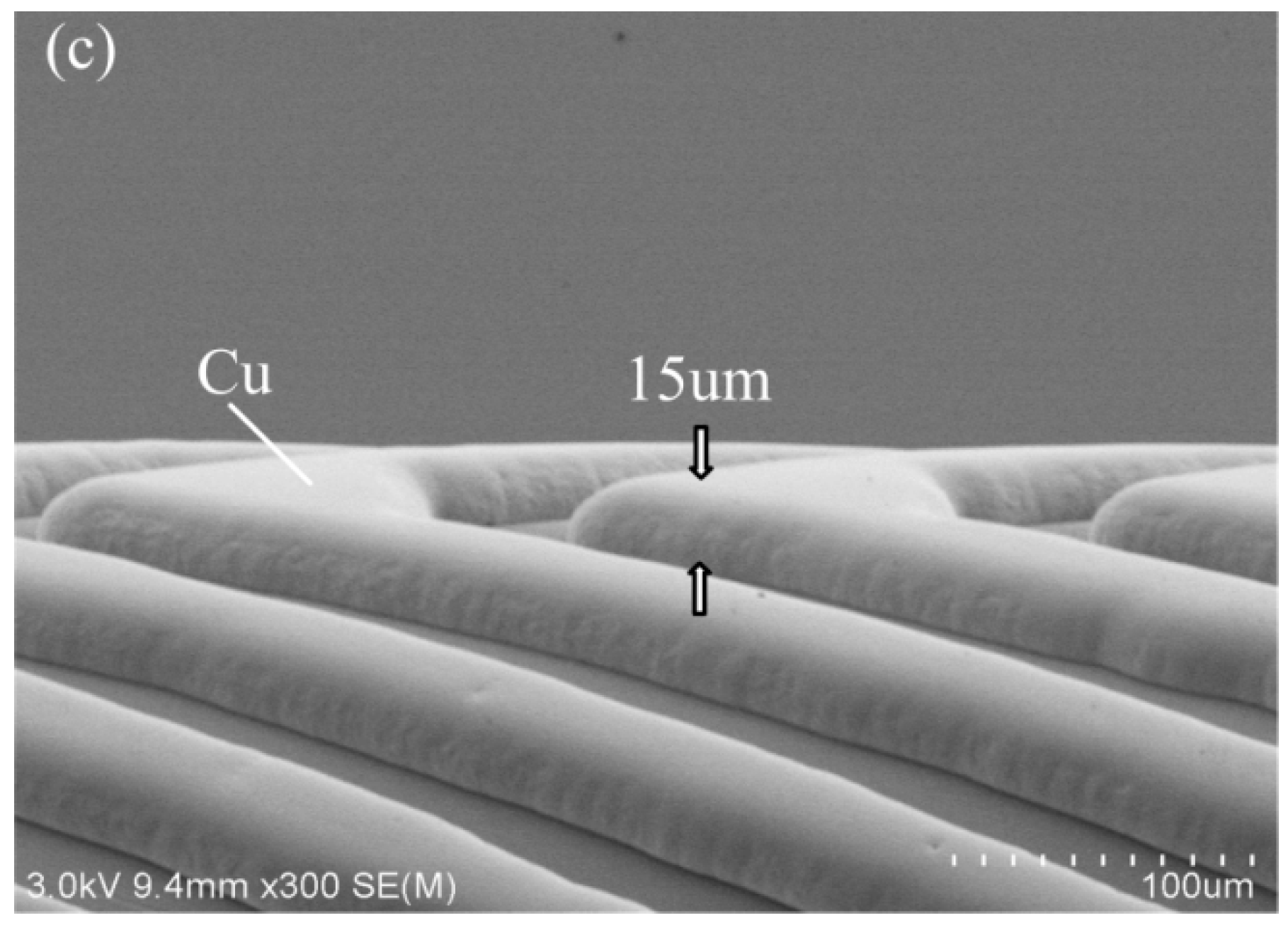
4.2. Characteristics of Electroplated Tilted Microcoil
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seibel, E.J. 1-mm catheterscope. In Proceedings of the SPIE 2008 Optical Fibers and Sensors for Medical Diagnostics and Treatment Applications VIII, San Jose, CA, USA, 19–21 January 2008; pp. 685207–685208. [Google Scholar]
- Matsunaga, T.; Hino, R.; Makishi, W.; Esashi, M.; Haga, Y. Electromagnetically driven ulutra-miniature single fiber scanner for high-resolution endoscopy fabricated on cylindrical substrates using MEMS process. In Proceedings of the 23rd IEEE International Conference on Micro Electro Mechanical Systems, Hong Kong, China, 24–28 January 2010; p. 999. [Google Scholar]
- Kamiuchi, H.; Kuwana, K.; Fukuyo, T.; Yamashita, H.; Chiba, T.; Dohi, T.; Masamune, K. 3-D endoscope using a single CCD camera and pneumatic vibration mechanism. Surg. Endosc. 2013, 27, 1642–1647. [Google Scholar] [CrossRef] [PubMed]
- Catanzaro, A.; Faulx, A.; Isenberg, G.A.; Wong, R.C.; Cooper, G.; Sivak, M.V.; Chak, A. Prospective Evaluation of 4-mm Diameter Endoscopes for Esophagoscopy in Sedated and Unsedated Patients. Gastrointest. Endoscopy 2003, 57, 300–304. [Google Scholar]
- Liu, X.; Huang, Y.; Kang, J.U. Dark-field illuminated reflectance fiber bundle endoscopic microscope. J. Biomed. Opt. 2011, 16, 046003. [Google Scholar] [CrossRef] [PubMed]
- Kester, R.T.; Bedard, N.; Gao, L.; Tkaczyk, T.S. Real-time snapshot hyperspectral imaging endoscope. J. Biomed. Opt. 2011, 16, 056005. [Google Scholar] [CrossRef] [PubMed]
- Niklas, W.; Hans, Z.; Andreas, S. Endoscopic optical probes for linear rotational scanning. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems, Taipei, Taiwan, 20–24 January 2013; p. 1065. [Google Scholar]
- Hu, H.P.; Chiao, J.C. A compact fiber optical scanner using electromagnetic actuation. In Proceedings of the International Society for Optics and Photonics Photonics: Design, Technology, and Packaging II, Brisbane, Australia, 12–14 December 2005; Vol. 6038. [Google Scholar]
- Niklas, W.; Tobias, M.; Hans, Z.; Andreas, S. Tunable MEMS fiber scanner for confocal microscopy. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; p. 881. [Google Scholar]
- Babak, A.; Min, H.T.; Simon, W.; Kenichi, T. Ferrofluid-assisted micro rotary motor for minially invasive endoscopy application. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; p. 200. [Google Scholar]
- Niklas, W.; Daniel, H.; Hans, Z.; Andreas, S. Polymer/Silicon Hard Magnetic Micromirrors. J. Microelectr. Syst. 2012, 21, 1098–1106. [Google Scholar]
- Lee, K.D.; Hiroshima, H.; Zhang, Y.; Itoh, T.; Maeda, R. Cylindrical projection lithography for microcoil structure. Microelectr. Eng. 2011, 88. [Google Scholar] [CrossRef]
- Uchiyama, S.; Hayase, M.; Takagi, H.; Itoh, T.; Zhang, Y. Spray Coating Deposition of Thin Resist Film on Fiber Substrates. Jpn. J. Appl. Phys. 2012, 51, 116502. [Google Scholar] [CrossRef]
- Toda, A. Electroplating of copper film on capillary (In Japanese); Meltex Report No.53; Meltex Inc.: Tokyo, Japan, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Geometric Parameters and Material Property | Values |
|---|---|---|
| Optical fiber | Elastic Modulus Ef | 1.72 GPa |
| Poisson ratio Rf | 0.17 | |
| Density ρf | 2200 Kg/m2 | |
| Length F1, F2, F3 | 4 mm, 3 mm, 6 mm | |
| Diameter Df | 125 µm | |
| Magnet | Elastic Modulus Em | 210 GPa |
| Poisson ratio Rm | 0.31 | |
| Density ρm | 8500 Kg/m2 | |
| Length M1 | 3 mm | |
| Diameter Dm | 600 µm | |
| Lens | Elastic Modulus El | 1.72 GPa |
| Poisson ratio Rl | 0.17 | |
| Density ρl | 2200 Kg/m2 | |
| Length L1 | 2 mm | |
| Diameter Dl | 1 mm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Shi, J.; Sun, B.; Yao, J.; Ding, G.; Sawada, R. Fabrication of Electromagnetically-Driven Tilted Microcoil on Polyimide Capillary Surface for Potential Single-Fiber Endoscope Scanner Application. Micromachines 2018, 9, 61. https://doi.org/10.3390/mi9020061
Yang Z, Shi J, Sun B, Yao J, Ding G, Sawada R. Fabrication of Electromagnetically-Driven Tilted Microcoil on Polyimide Capillary Surface for Potential Single-Fiber Endoscope Scanner Application. Micromachines. 2018; 9(2):61. https://doi.org/10.3390/mi9020061
Chicago/Turabian StyleYang, Zhuoqing, Jianhao Shi, Bin Sun, Jinyuan Yao, Guifu Ding, and Renshi Sawada. 2018. "Fabrication of Electromagnetically-Driven Tilted Microcoil on Polyimide Capillary Surface for Potential Single-Fiber Endoscope Scanner Application" Micromachines 9, no. 2: 61. https://doi.org/10.3390/mi9020061