
Monitoring Errors of Semi-Mechanized Coffee Planting by Remotely Piloted Aircraft

 , ,
, ,  , , ,
, , ,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
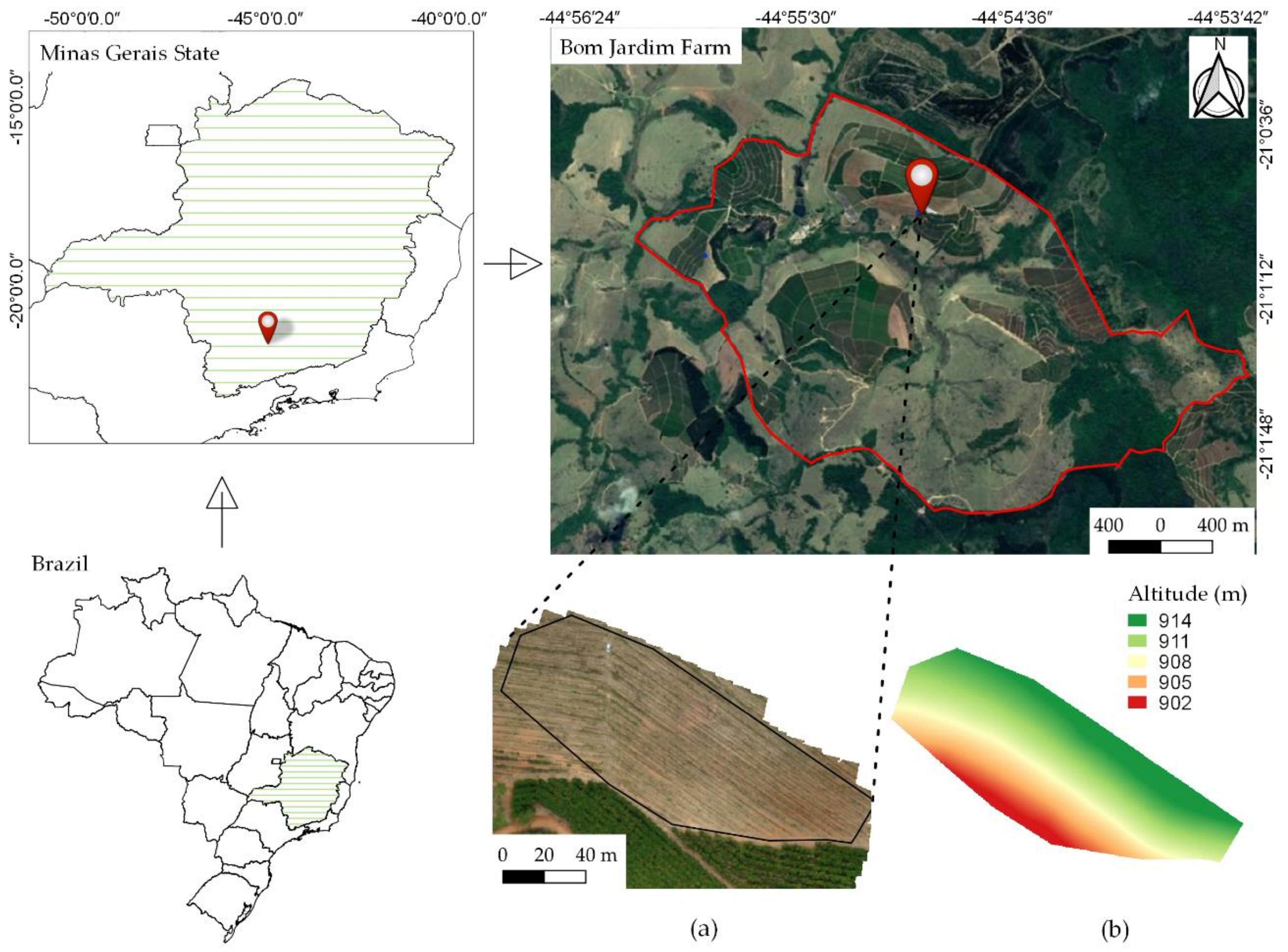
2.1. Study Area
2.2. Obtaining Aerial Images
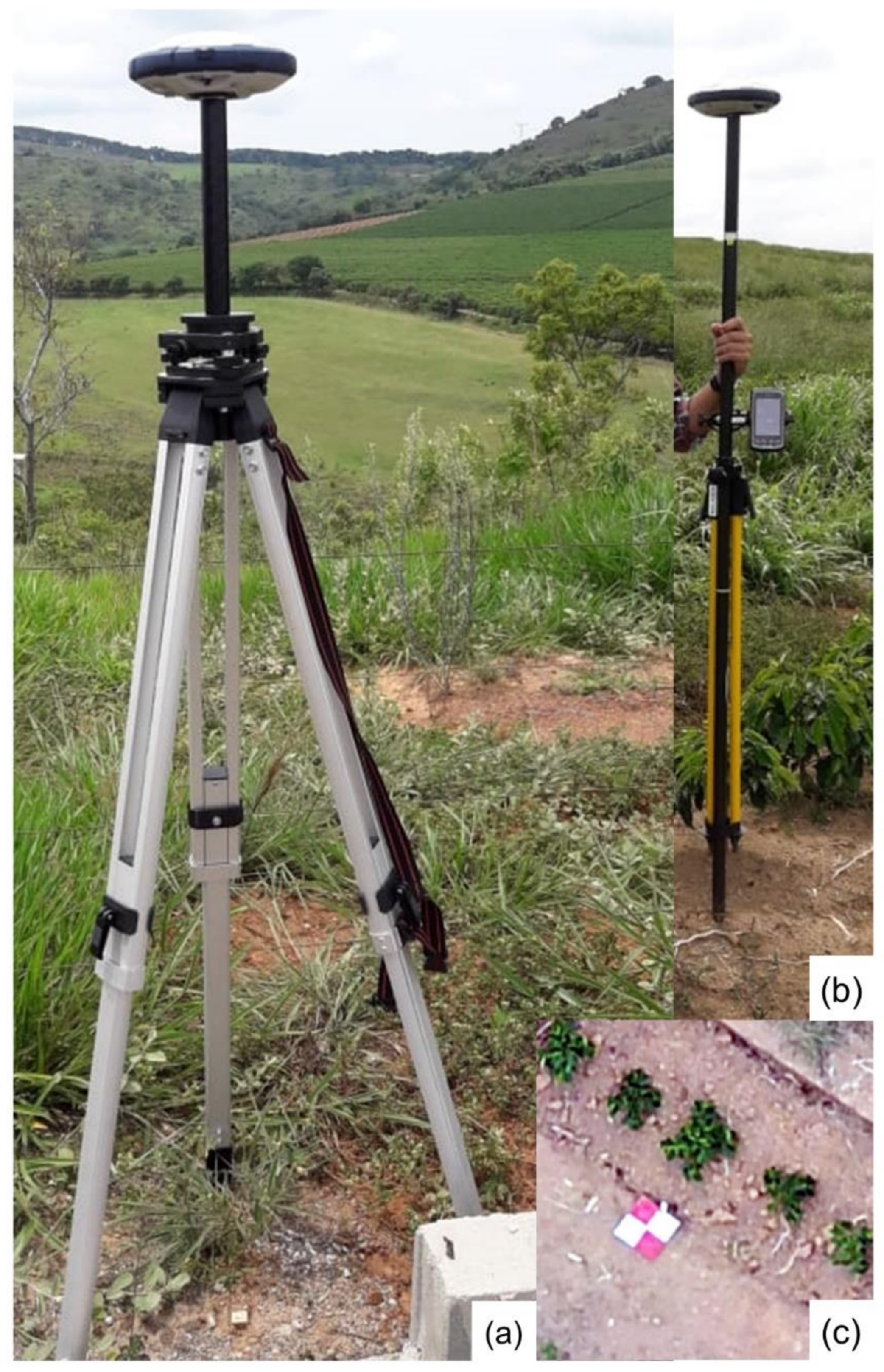
2.3. Ground Control Points—GCPs
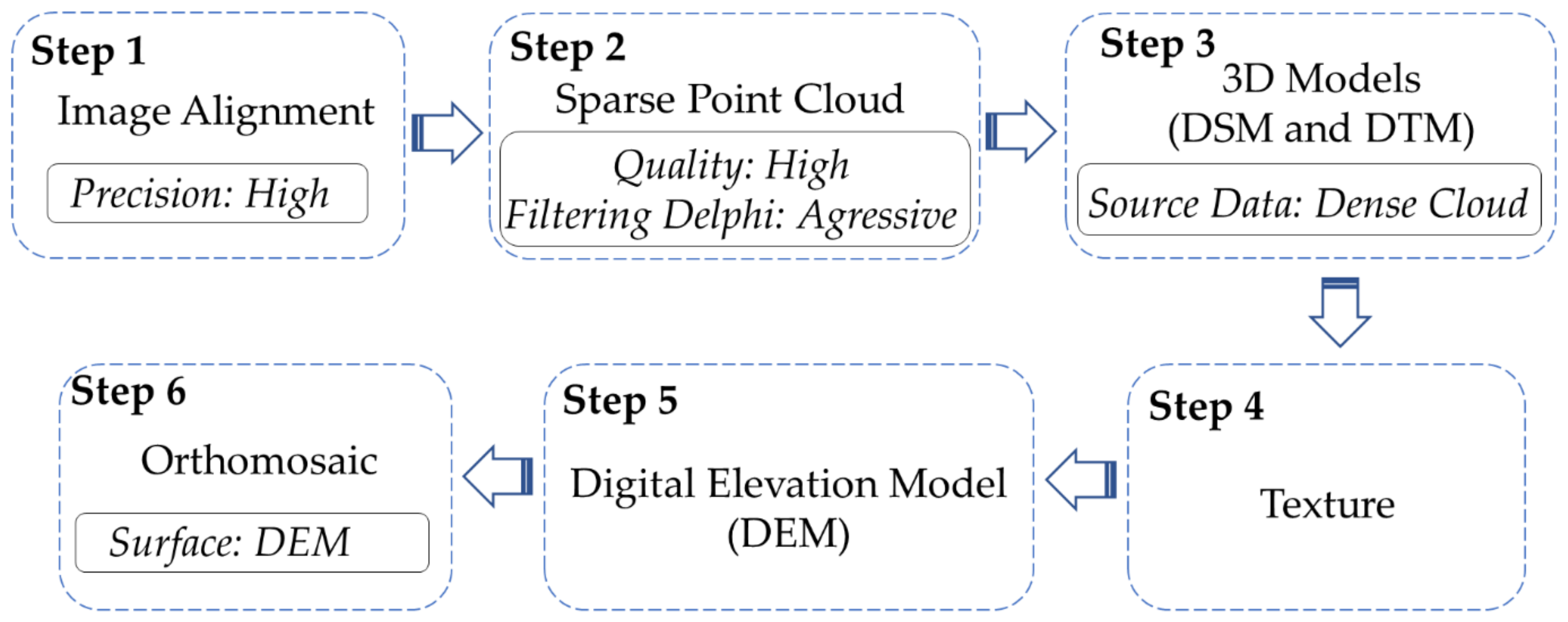
2.4. Photogrammetric Processes
- -
- n is the number of GCPs.
- -
- XOi, YOi, and ZOi are, respectively, X, Y, and Z coordinates measured in orthophoto.
- -
- XGNSSi, YGNSSi, and YGNSSi are, respectively, X, Y, and Z coordinates measured in field by receivers GNSS.
2.5. Data Collection and Statistical Analysis
- c4 and c5: values from a table
- ni: size of the ith subgroup
- k: parameter that is specified for Test 1 of the tests for special causes, 1 point > K standard deviations from center line. By default, k = 3.
- σ: estimated standard deviation, which depends on the options chosen.
3. Results
3.1. Plant Distribution
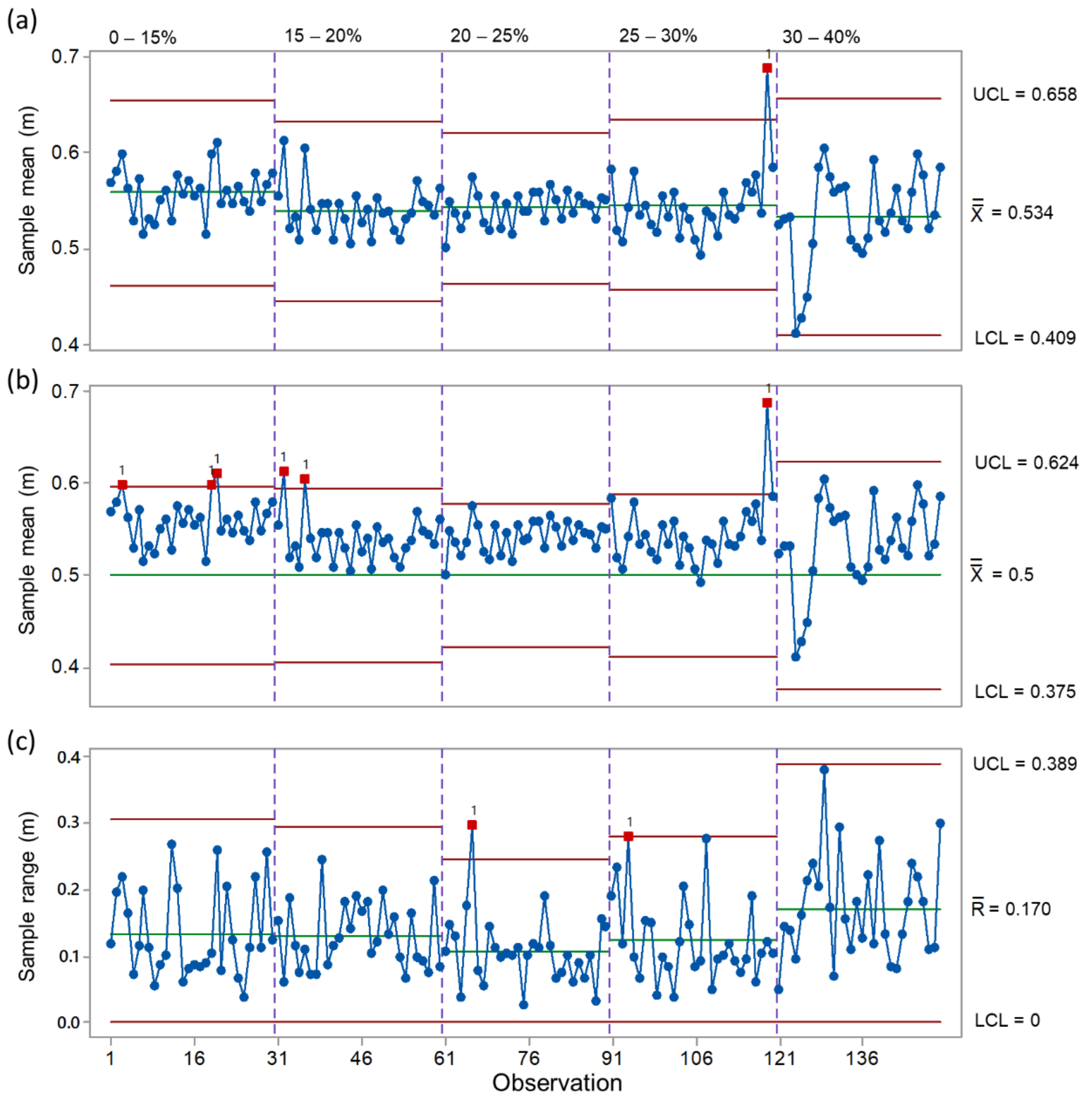
3.2. Spacing between Plants
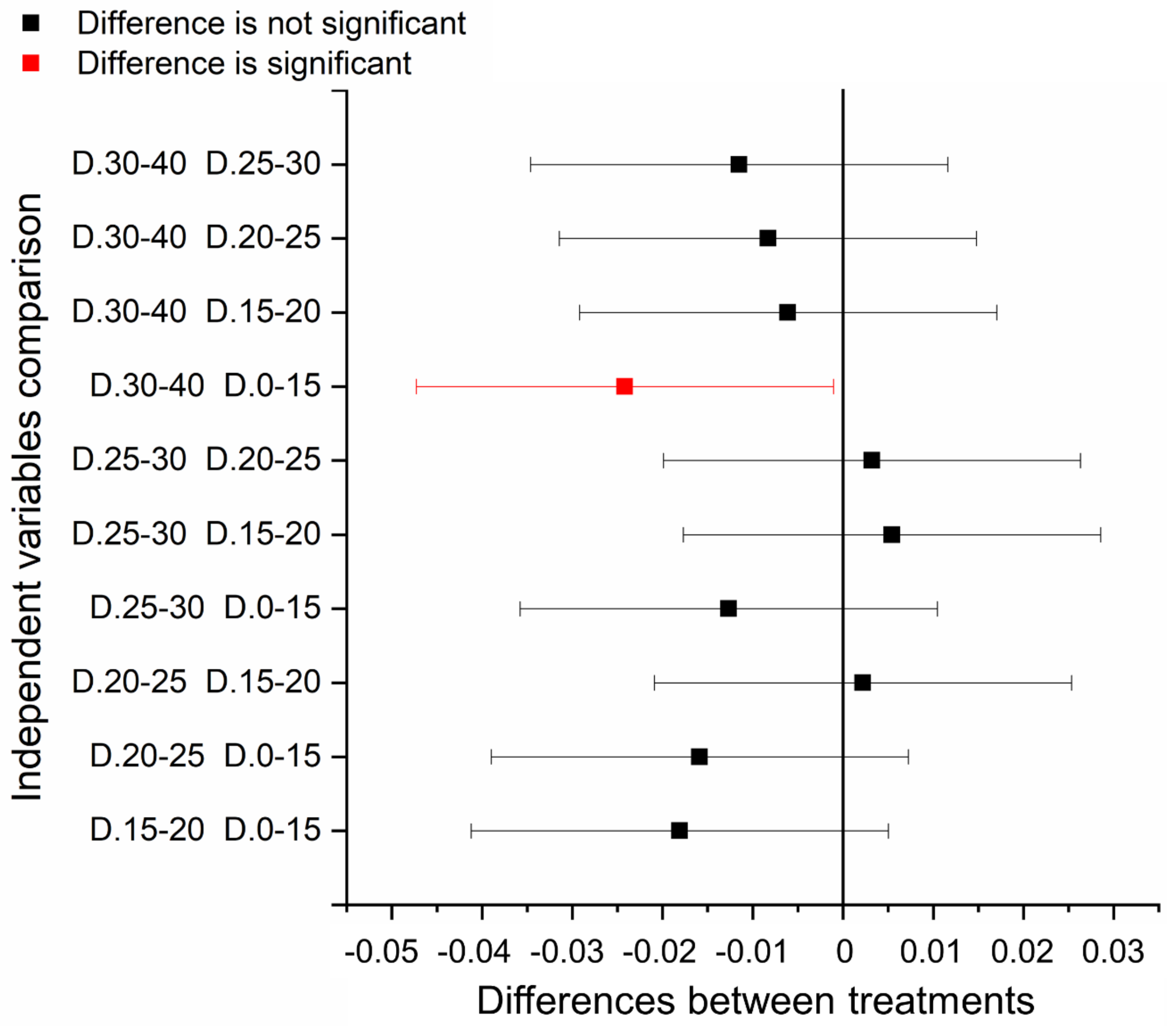
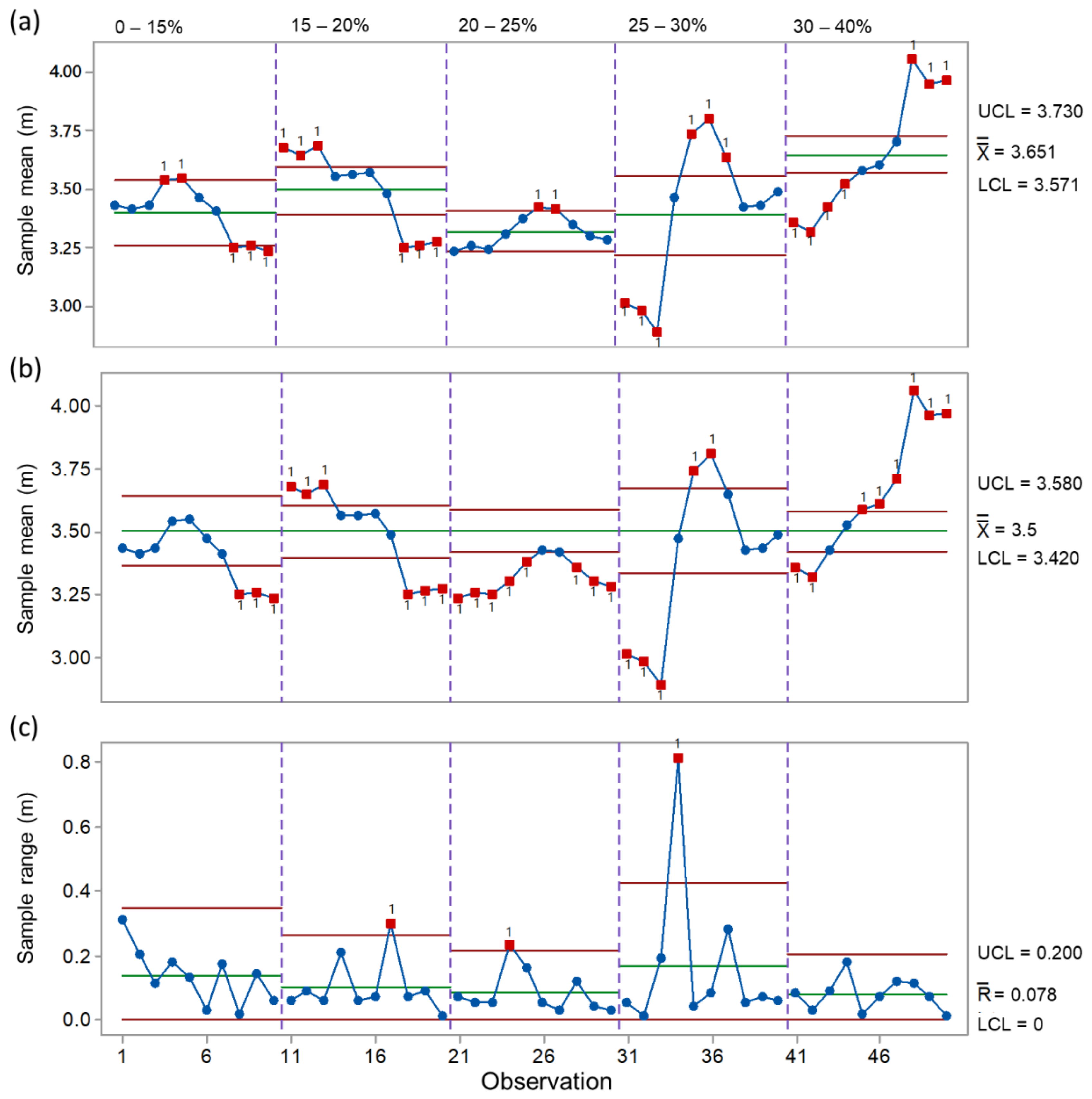
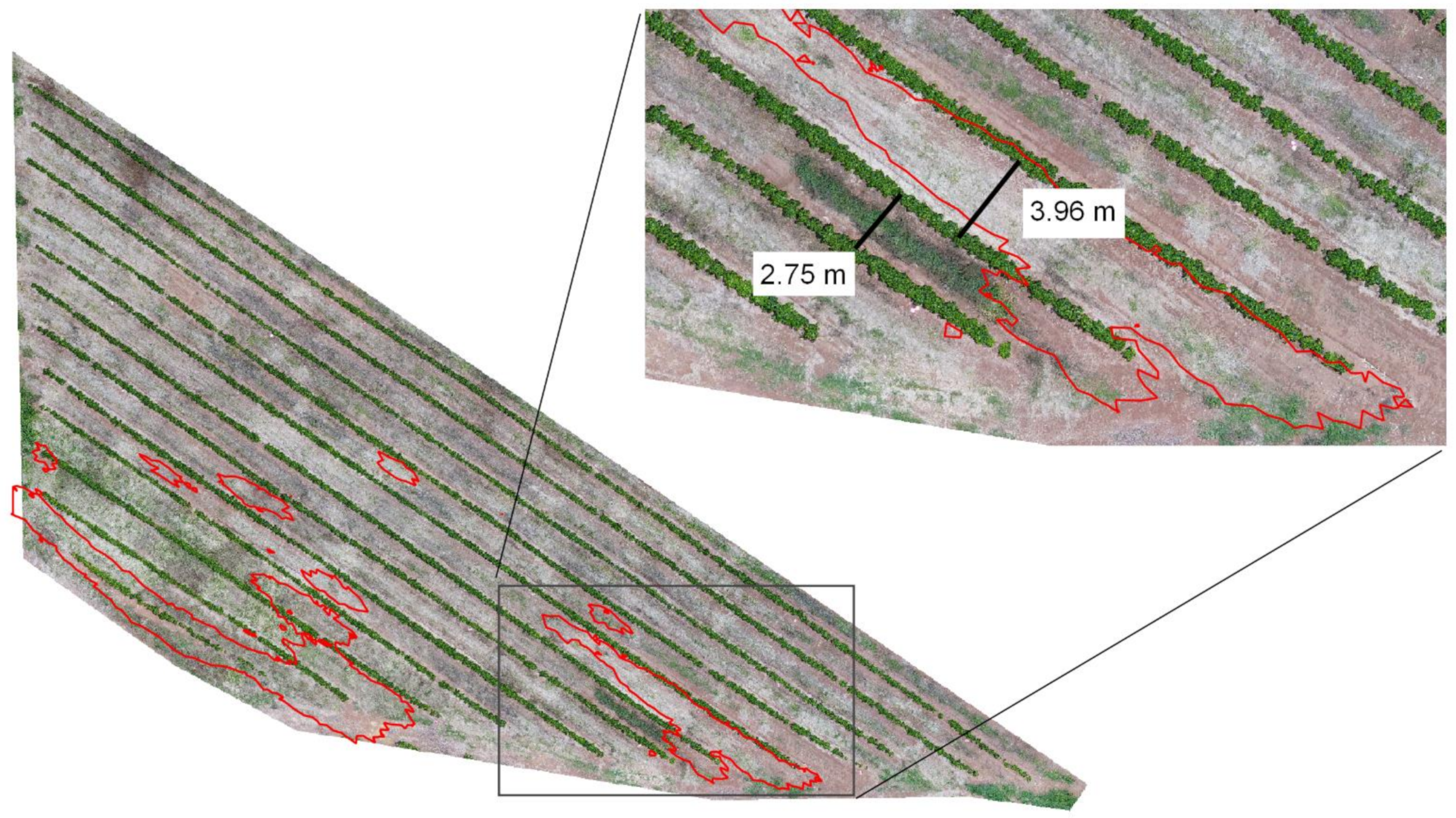
3.3. Spacing between Planting Rows
4. Discussion
4.1. Plant Distribution
4.2. Spacing between Plants
4.3. Spacing between Planting Rows
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Belan, L.L.; Junior, W.C.d.J.; Souza, A.F.; Zambolim, L.; Filho, J.C.; Barbosa, D.H.S.G.; Moraes, W.B. Management of coffee leaf rust in Coffea canephora based on disease monitoring reduces fungicide use and management cost. Eur. J. Plant Pathol. 2020, 156, 683–694. [Google Scholar] [CrossRef]
- Baitelle, D.C.; Freitas, S.D.J.; Vieira, K.M. Feasibility and Economic Risk of Programmed Pruning Cycle in Arabic Coffee Feasibility and Economic Risk of Programmed Pruning Cycle in Arabic Coffee. J. Exp. Agric. Int. 2018. [Google Scholar] [CrossRef] [Green Version]
- Cunha, J.P.B.; Silva, F.M.; Dias, R.E.B.A. Eficiência de campo em diferentes operações mecanizadas na cafeicultura. Coffee Sci. 2016, 11, 76–86. [Google Scholar]
- Fernandes, A.L.T.; Partelli, F.L.; Bonomo, R.; Golynski, A. A moderna cafeicultura dos cerrados brasileiros. Pesqui. Agropecuária Trop. 2012, 42, 231–240. [Google Scholar] [CrossRef]
- Silva, J.A.R.; Oliveira, G.G.; Júnior, C.E.; Melo Costa, A.B.; Silva, C.P.C.; Gabriel, F.F.P. Occupational noise level in mechanized and semimecanized harvest of coffee fruits. Coffee Sci. 2018, 13, 448–454. [Google Scholar] [CrossRef]
- Aparecido, L.E.d.O.; Souza, I.T.d.; Miranda, G.R.B.; Moraes, J.R.d.S.C.; Moraes-Oliveira, A.F.; Paula, F.V. Tipos de plantio e fertilizante biológico no cafeeiro em função do índice térmico. Coffee Sci. 2017, 12, 307–315. [Google Scholar] [CrossRef]
- Marchi, E.C.S.; Campos, K.P.; Corrêa, J.B.D.; Guimarães, R.J.; Souza, C.A.S. Sobrevivência de mudas de cafeeiro produzidas em sacos plásticos e tubetes no sistema convencional e plantio direto, em duas classes de solo. Ceres 2003, 50, 407–416. [Google Scholar]
- Gimenes, G.R.; Oliveira, R.B.; Silva, A.F.; Reis, L.C.; Reis, T.E.S. Mapping of slopes for the operation of agricultural harvesters in Bandeirantes Municipality (PR). Semin. Agrar. 2017, 38, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Dubbini, M.; Curzio, L.I.; Campedelli, A. Digital elevation models from unmanned aerial vehicle surveys for archaeological interpretation of terrain anomalies: Case study of the Roman castrum of Burnum (Croatia). J. Archaeol. Sci. Rep. 2016, 8, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Akturk, E.; Altunel, A.O. Accuracy assesment of a low-cost UAV derived digital elevation model (DEM) in a highly broken and vegetated terrain. Meas. J. Int. Meas. Confed. 2019, 136, 382–386. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Meas. J. Int. Meas. Confed. 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Piras, M.; Taddia, G.; Forno, M.G.; Gattiglio, M.; Aicardi, I.; Dabove, P.; Russo, S.L.; Lingua, A. Detailed geological mapping in mountain areas using an unmanned aerial vehicle: Application to the Rodoretto Valley, NW Italian Alps. Geomat. Nat. Hazards Risk 2017, 8, 137–149. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Peloia, P.R.; Milan, M.; Romanelli, T.L. Capacity of the mechanical harvesting process of sugar cane billets. Sci. Agric. 2010, 67, 619–623. [Google Scholar] [CrossRef]
- Zerbato, C.; Furlani, C.E.A.; Voltarelli, M.A.; Bertonha, R.S.; Silva, R.P. Quality control to seeding systems and densities in peanut crop. Aust. J. Crop Sci. 2014, 8, 992–998. [Google Scholar]
- Hrvačić, I. Design and implementation of SPC systems in defense industry manufacturing process. Period. Eng. Nat. Sci. 2018, 6, 27–40. [Google Scholar] [CrossRef] [Green Version]
- Toledo, A.; Tabile, R.A.; Silva, R.P.; Furlani, C.E.A.; Magalhães, S.C.; Costa, B.O. Caracterização das perdas e distribuição de cobertura vegetal em colheita mecanizada de soja. Eng. Agric. 2008, 28, 710–719. [Google Scholar] [CrossRef]
- Noronha, R.H.d.F.; Oliveira, M.F.; Mendes, A.L.; Damasceno, A.F.; Zerbato, C.; Furlani, C.E.A. Application of signal correction for sphenophorus levis control and higher quality production in mechanized harvesting of sugarcane ratoon. Aust. J. Crop Sci. 2019, 13, 1936–1942. [Google Scholar] [CrossRef]
- Chinchilla, S.R.A.; Silva, Ê.F.d.F.; Almeida, C.D.G.C.; Silva, A.O.; Santos, P.R. Statistical process control in the assessment of drip irrigation using wastewater. Eng. Agric. 2018, 38, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Cunha, J.P.B.; Silva, F.M.; Andrade, E.T.; Barros, M.M. De Parameters of operational performance of soil preparation and semi- mechanized transplantation of coffee seedling. Eng. Agric. 2018, 38, 910–917. [Google Scholar]
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; De Moraes Gonçalves, J.L.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- Santos, L.M.D.; Ferraz, G.A.S.; Andrade, M.T.; Santana, L.S.; Barbosa, B.D.S.; Maciel, D.T.; Rossi, G. Analysis of flight parameters and georeferencing of images with different control points obtained by RPA. Agron. Res. 2019, 17, 2054–2063. [Google Scholar] [CrossRef]
- Rangel, J.M.G.; Gonçalves, G.R.; Pérez, J.A. The impact of number and spatial distribution of GCPs on the positional accuracy of geospatial products derived from low-cost UASs. Int. J. Remote Sens. 2018, 39, 7154–7171. [Google Scholar] [CrossRef]
- Liba, N.; Berg-Jürgens, J. Accuracy of orthomosaic generated by different methods in example of UAV platform MUST Q. IOP Conf. Ser. Mater. Sci. Eng. 2015, 96, 012041. [Google Scholar] [CrossRef]
- Santana, L.S.; Ferraz, G.A.E.S.; Marin, D.B.; Barbosa, B.D.S.; Santos, L.M.; Ferraz, P.F.P.; Conti, L.; Camiciottoli, S.; Rossi, G. Influence of flight altitude and control points in the georeferencing of images obtained by unmanned aerial vehicle. Eur. J. Remote Sens. 2021, 54, 59–71. [Google Scholar] [CrossRef]
- Grinter, T.; Roberts, C. Precise Point Positioning: Where are we now? In Proceedings of the IGNSS Symposium 2011, Sydney, Australia, 15–17 November 2011; pp. 1–15. [Google Scholar]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Dietrich, J.T. Riverscape mapping with helicopter-based Structure-from-Motion photogrammetry. Geomorphology 2016, 252, 144–157. [Google Scholar] [CrossRef]
- Flynn, K.; Chapra, S. Remote sensing of submerged aquatic vegetation in a shallow non-turbid river using an unmanned aerial vehicle. Remote Sens. 2014, 6, 12815–12836. [Google Scholar] [CrossRef] [Green Version]
- Rusnák, M.; Sládek, J.; Kidová, A.; Lehotský, M. Template for high-resolution river landscape mapping using UAV technology. Meas. J. Int. Meas. Confed. 2018, 115, 139–151. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef] [Green Version]
- Hallak, R.; Pereira Filho, A.J. Metodologia para análise de desempenho de simulações de sistemas convectivos na região metropolitana de São Paulo com o modelo ARPS: Sensibilidade a variações com os esquemas de advecção e assimilação de dados. Rev. Bras. Meteor. 2011, 26, 591–608. [Google Scholar] [CrossRef] [Green Version]
- Santos, H.G.; Jacomine, P.K.T.; Anjos, L.H.C.; Oliveira, V.Á.; Lumbreras, J.F.; Coelho, M.R.; Almeida, J.A.; Araujo Filho, J.C.d.; Oliveira, J.B.; Cunha, T.J.F. Sistema Brasileiro de Classificação de Solos; Embrapa Solos Rua Jardim Botânico: Rio de Janeiro, Brazil, 2018; ISBN 978-85-7035-198-2. [Google Scholar]
- Molnau, W.E.; Montgomery, D.C.; Runger, G.C. Statistically constrained economic design of the Multivariate Exponentially Weighted Moving Average control chart. Qual. Reliab. Eng. Int. 2001, 17, 39–49. [Google Scholar] [CrossRef]
- Tavares, T.d.O.; Silva, R.P.; Santinato, F.; Santos, A.F.; Paixao, C.S.S.; Silva, V.d.A. Operational performance of the mechanized picking of coffee in four soil slope. Afr. J. Agric. Res. 2016, 11, 4857–4863. [Google Scholar] [CrossRef] [Green Version]
- Alves, E.L.; Pereira, F.A.C.; Dalchiavon, F.C. Potencial econômico da utilização de micro-terraceamento em lavouras de café: Um estudo de caso. Rev. IPecege 2017, 3, 24–38. [Google Scholar] [CrossRef] [Green Version]
- Cunha, J.P.B.; Silva, F.M.d.; Andrade, F.; Machado, T.d.A.; Batista, F.A. Análise técnica e economica de diferentes sistemas de transplantio de café (Coffea arabica L.). Coffee Sci. 2015, 10, 289–297. [Google Scholar]
- Pereira, S.P.; Bartholo, G.F.; Baliza, D.P.; Sobreira, F.M.; Guimarães, R.J. Crescimento, produtividade e bienalidade do cafeeiro em função do espaçamento de cultivo. Pesqui. Agropecu. Bras. 2011, 46, 152–160. [Google Scholar] [CrossRef]
- Martins, P.G.; Laugeni, F.R. Administração da Produção; Editora Saraiva: São Paulo, Brazil, 2005. [Google Scholar]
- Hadian, H.; Rahimifard, A. Multivariate statistical control chart and process capability indices for simultaneous monitoring of project duration and cost. Comput. Ind. Eng. 2019, 130, 788–797. [Google Scholar] [CrossRef]
- Silva, R.P.; Voltarelli, M.A.; Cassia, M.T.; Vidal, D.O.; Cavichioli, F.A. Qualidade das operações de preparo de solo e transplantio mecanizado de mudas de café. Coffee Sci. 2014, 9, 51–60. [Google Scholar]
- Bernardes, T.; Moreira, M.A.; Adami, M.; Rudorff, B.F.T. Physic-environmental diagnosis of coffee crop in the state of Minas Gerais, Brazil. Coffee Sci. 2012, 7, 139–151. [Google Scholar] [CrossRef]
- Rezende, F.A. Determinação das Áreas Cafeeiras Mecanizáveis no sul de Minas Gerais Com Cenários Para a Colheita. Master’s Thesis, Federal University of Lavras, Lavras, Brazil, 2008. [Google Scholar]
- Höfig, P.; Araujo-Junior, C.F. Classes de declividade do terreno e potencial para no estado do paraná. Coffee Sci. 2015, 10, 195–203. [Google Scholar]
- Huxley, P.A.; Patel, R.Z.; Kabaara, A.M.; Mitchell, H.W. Tracer studies with 32P on the distribution of functional roots of Arabica coffee in Kenya. Ann. Appl. Biol. 1974, 77, 159–180. [Google Scholar] [CrossRef]
- Covre, A.M.; Partelli, F.L.; Gontijo, I.; Zucoloto, M. Distribuição do sistema radicular de cafeeiro conilon irrigado e não irrigado. Pesqui. Agropecu. Bras. 2015, 50, 1006–1016. [Google Scholar] [CrossRef] [Green Version]
- Guerra, A.; Rocha, O.; Rodrigues, G.; Sanzonowicz, C.; Mera, A.; Cordeiro, A. Comportamento de Três Cultivares de Café Submetidas a Diferentes Espaçamentos Entre Linhas e Regimes Hídricos no Cerrado; Embrapa Solos Rua Jardim Botânico: Rio de Janeiro, Brazil, 2007. [Google Scholar]
- Júnior, J.M.D.S.; Ruas, R.A.A.; Silva, C.D.; Faria, V.R.; Filho, A.C.; Vieira, L.C. Determination of spray volume index for culture of coffee. Coffee Sci. 2017, 12, 82–90. [Google Scholar] [CrossRef]
- Santinato, F.; Ruas, R.A.A.; Silva, C.D.; Silva, R.P.; Gonçalves, V.A.R.; Júnior, J.M.D.S. Deposição da calda de pulverização em diferentes volumes vegetativos de Coffea arabica L. Coffee Sci. 2017, 12, 69. [Google Scholar] [CrossRef]
- Santinato, F.; Silva, R.P.; Silva, V.d.A.; Silva, C.D.; Tavares, T.d.O. Mechanical Harvesting of Coffee in High Slope. Rev. Caatinga 2016, 29, 685–691. [Google Scholar] [CrossRef] [Green Version]
- Silva, F.D.; Salvador, N. Mecanização da Lavoura Cafeeira, 55th ed.; Universidade Federal de Lavras: Lavras, Brazil, 1998. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| #Label | Accuracy_X/Y/Z_(m) | Error_(m) | X_Error (m) | Y_Error (m) | Z_Error (m) |
|---|---|---|---|---|---|
| 1 | 0.005 | 0.480 | 0.354 | −0.244 | −0.212 |
| 2 | 0.005 | 0.157 | −0.015 | 0.135 | −0.078 |
| 3 | 0.005 | 0.567 | −0.402 | 0.399 | 0.016 |
| 4 | 0.005 | 1.106 | −0.883 | 0.661 | 0.072 |
| 5 | 0.005 | 1.540 | −1.305 | 0.807 | 0.132 |
| 6 | 0.005 | 1.931 | −1.794 | 0.715 | −0.024 |
| 7 | 0.005 | 2.247 | −2.142 | 0.464 | −0.495 |
| 8 | 0.005 | 0.301 | 0.184 | 0.201 | 0.128 |
| 9 | 0.005 | 0.546 | −0.282 | 0.446 | 0.143 |
| 10 | 0.005 | 1.033 | −0.722 | 0.730 | 0.119 |
| 11 | 0.005 | 9.561 | 7.826 | −5.486 | 0.274 |
| 12 | 0.005 | 1.070 | −0.674 | 0.814 | −0.168 |
| 13 | 0.005 | 0.508 | −0.153 | 0.484 | −0.019 |
| Slope (%) | |||||
|---|---|---|---|---|---|
| 0–15 | 15–20 | 20–25 | 25–30 | 30–40 | |
| Projected x1 | 151 | 870 | 1166 | 1031 | 239 |
| Planted x2 | 143 | 812 | 1074 | 975 | 236 |
| Medium spacing (m) | 0.53 | 0.54 | 0.54 | 0.53 | 0.51 |
| Δx | 8 | 58 | 92 | 56 | 3 |
| Δx (%) | 5.44 | 6.64 | 7.89 | 5.39 | 1.22 |
| Variation Source | Degrees of Freedom | Sum of Squares | Mean Square | F Value | Prob > F |
|---|---|---|---|---|---|
| Treatment (slopes) | 4 | 0.039 | 0.010 | 2252 | 0.062 |
| Error | 595 | 2548 | 0.004 | ||
| Total | 599 | 2587 | |||
| Tukey | |||||
| D.0–15 | 0.558 | a | |||
| D.15–20 | 0.540 | a | b | ||
| D.20–25 | 0.542 | a | b | ||
| D.25–30 | 0.545 | a | b | ||
| D.30–40 | 0.534 | b | |||
| Variation Source | Degrees of Freedom | Sum of Squares | Mean Square | F Value | Prob > F |
|---|---|---|---|---|---|
| Model | 4 | 1958 | 0.490 | 10,438 | 0.000 |
| Error | 145 | 6801 | 0.047 | ||
| Total | 149 | 8759 | |||
| Tukey’s test | |||||
| Slope (%) | Means (m) | ||||
| D.20–25 | 3321 | a | |||
| D.0–15 | 3340 | a b | |||
| D.25–30 | 3391 | a b | |||
| D.15–20 | 3498 | b c | |||
| D.30–40 | 3651 | c |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santana, L.S.; Ferraz, G.A.e.S.; Cunha, J.P.B.; Santana, M.S.; Faria, R.d.O.; Marin, D.B.; Rossi, G.; Conti, L.; Vieri, M.; Sarri, D. Monitoring Errors of Semi-Mechanized Coffee Planting by Remotely Piloted Aircraft. Agronomy 2021, 11, 1224. https://doi.org/10.3390/agronomy11061224
Santana LS, Ferraz GAeS, Cunha JPB, Santana MS, Faria RdO, Marin DB, Rossi G, Conti L, Vieri M, Sarri D. Monitoring Errors of Semi-Mechanized Coffee Planting by Remotely Piloted Aircraft. Agronomy. 2021; 11(6):1224. https://doi.org/10.3390/agronomy11061224
Chicago/Turabian StyleSantana, Lucas Santos, Gabriel Araújo e Silva Ferraz, João Paulo Barreto Cunha, Mozarte Santos Santana, Rafael de Oliveira Faria, Diego Bedin Marin, Giuseppe Rossi, Leonardo Conti, Marco Vieri, and Daniele Sarri. 2021. "Monitoring Errors of Semi-Mechanized Coffee Planting by Remotely Piloted Aircraft" Agronomy 11, no. 6: 1224. https://doi.org/10.3390/agronomy11061224