
The Method of Segmenting the Early Warning Thresholds Based on Fisher Optimal Segmentation
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
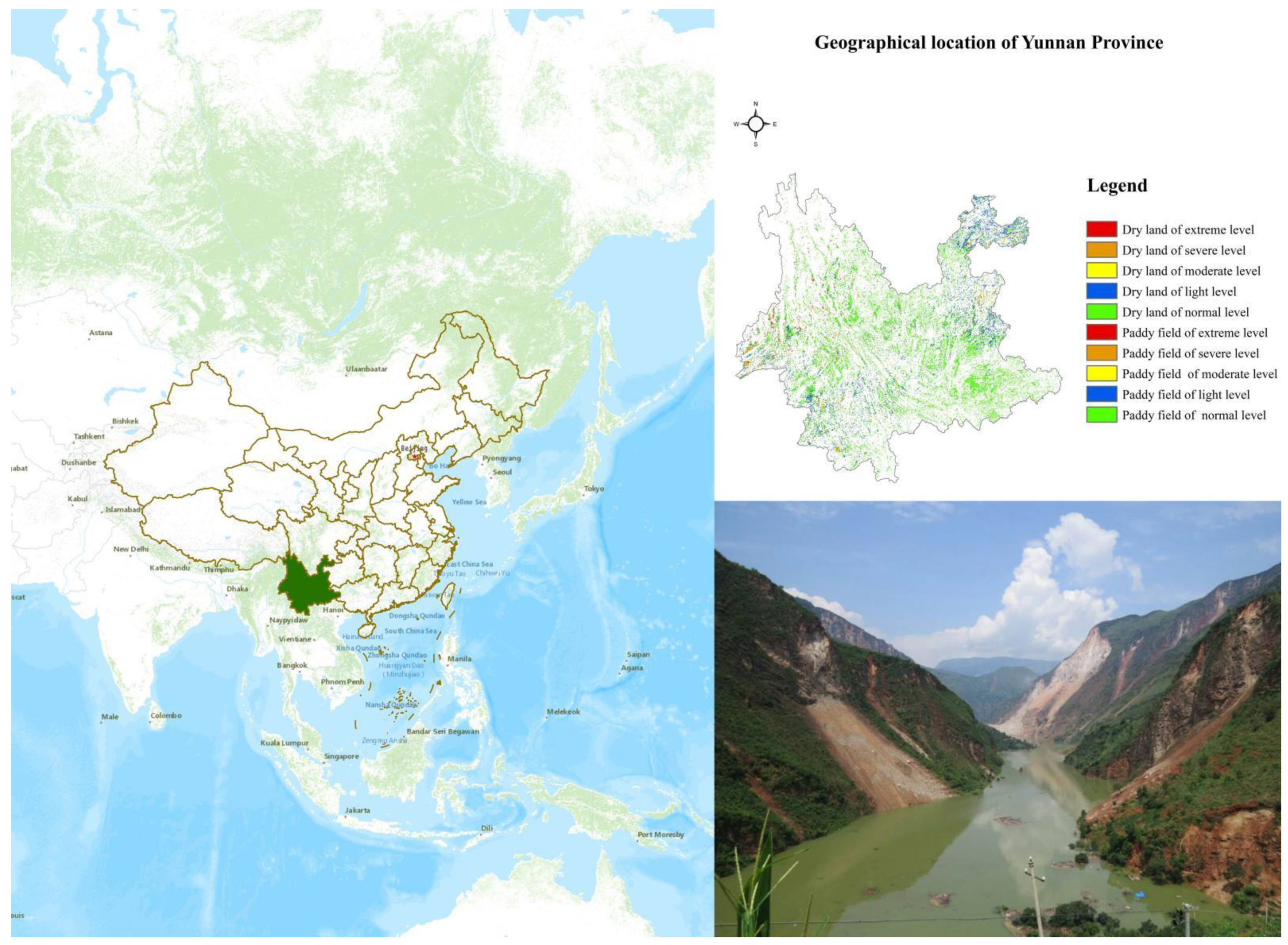
2.1. Study Area
2.2. Data Source
2.3. Landslide Type
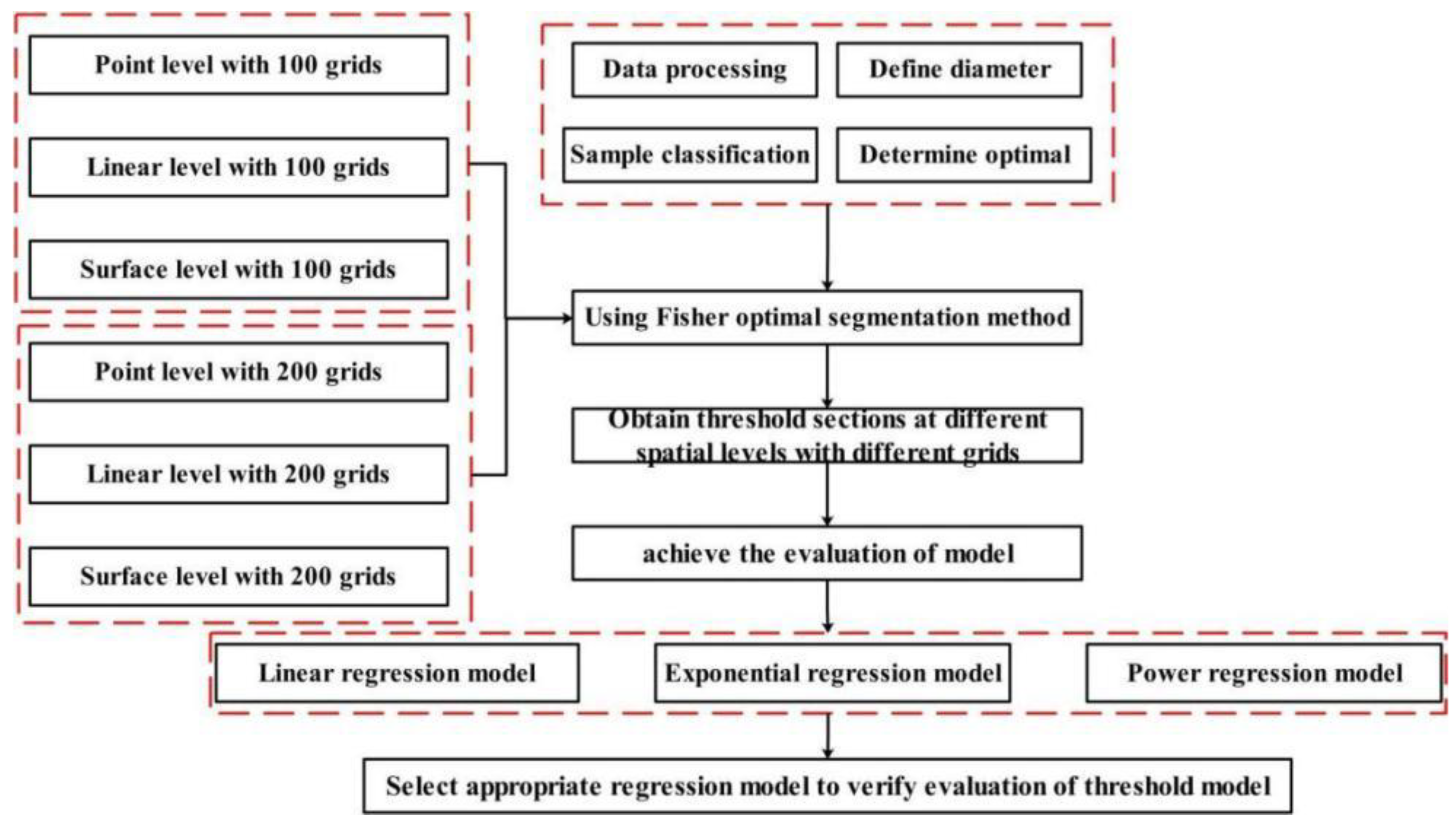
2.4. Fisher Optimal Segmentation Method
2.5. Accuracy Evaluation
3. Results
3.1. Indicators Selection
3.2. The Early Warning Signs of Sliding Thresholds Result
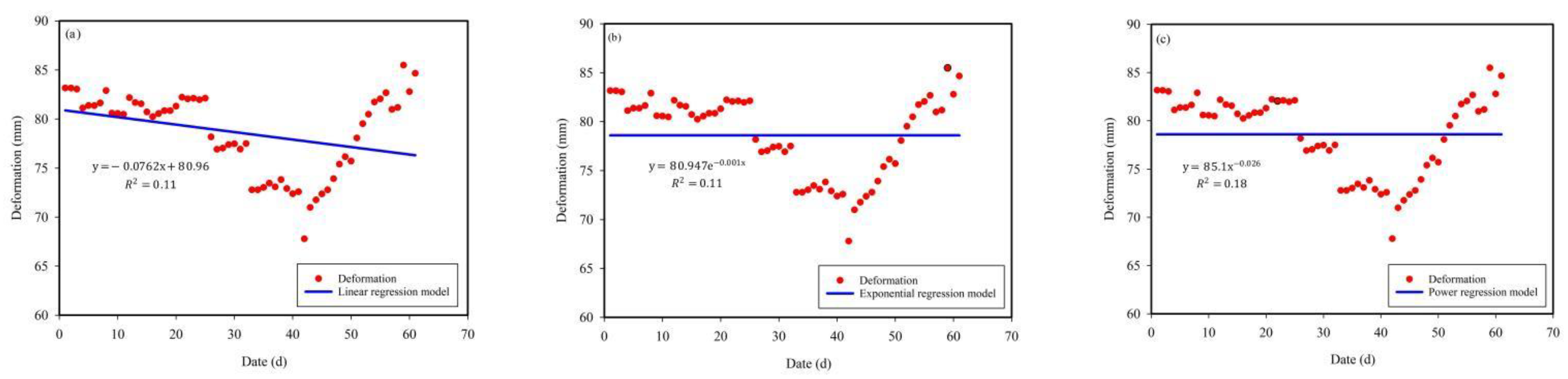
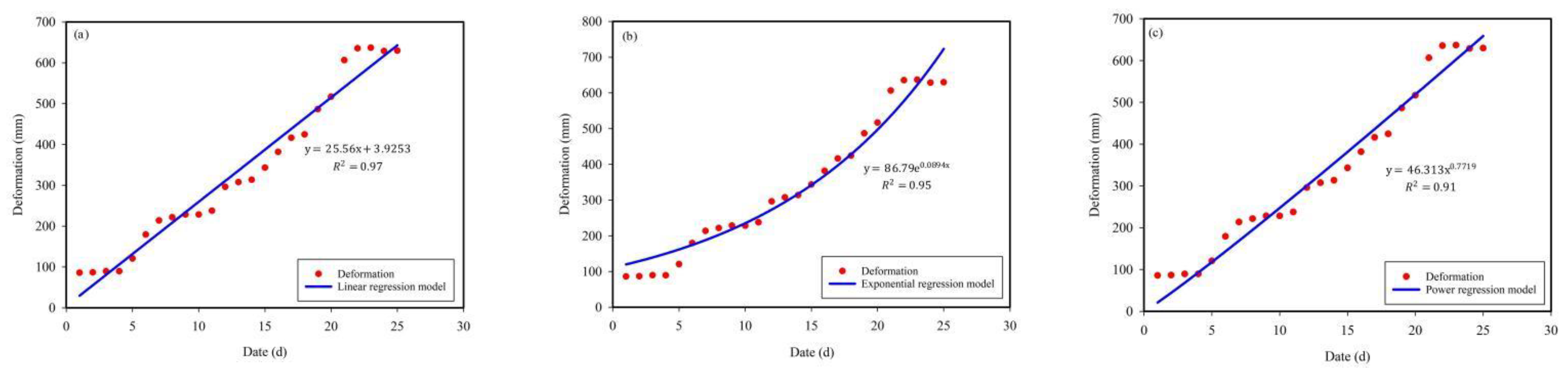
3.3. Accuracy Evaluation
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, C.I.; Kung, H.Y.; Chen, C.H.; Kuo, L.C. An intelligent slope disaster prediction and monitoring system based on WSN and ANP. Expert Syst. Appl. 2014, 41, 4554–4562. [Google Scholar] [CrossRef]
- Ren, B.; Yuan, L.; Mu, W.; Zhang, Y.; Yu, G.; Cao, C.; Wang, M.; Luo, Y.; Li, L. Investigation of a Method to Prevent Rock Failure and Disaster Due to a Collapse Column Below the Mine. Mine Water Env. 2022, 41, 979–995. [Google Scholar] [CrossRef]
- Khan, A.; Gupta, S.; Gupta, S.K. Multi-hazard disaster studies: Monitoring, detection, recovery, and management, based on emerging technologies and optimal techniques. Int. J. Disast Risk Re. 2020, 47, 101642. [Google Scholar] [CrossRef]
- Xu, Z. Recent researches on disaster prevention and mitigation in civil engineering. Sci. China Technol. Sci. 2011, 54, 1351–1354. [Google Scholar] [CrossRef]
- HE, M.; TAO, Z.; ZHANG, B. Application of remote monitoring technology in landslides in the Luoshan mining area. Min. Sci. Technol. 2009, 19, 609–614. [Google Scholar] [CrossRef]
- Takemoto, M.; Koizumi, K.; Fujiwara, Y.; Morishita, H.; Oda, K. Improvement of a slope disaster warning system for practical use. Jpn. Geotech. Soc. Spec. Publ. 2016, 2, 196–200. [Google Scholar] [CrossRef] [Green Version]
- Xie, M.; He, Z.; Liang, L.; Wu, Z.; Sun, G. Slope disaster monitoring and early warning system based on 3D-MEMS and NB-IoT. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 90–94. [Google Scholar]
- Wang, A.; Yu, H.; Miaochao, C.; Chen, M. The Construction and Empirical Analysis of the Company’s Financial Early Warning Model Based on Data Mining Algorithms. J. Math. 2022, 2022, 1–9. [Google Scholar] [CrossRef]
- Sakuradani, K.; Koizumi, K.; Oda, K.; Tayama, S. Development of a slope disaster monitoring system for expressway operation and maintenance control. J. GeoEngineering 2018, 13, 189–195. [Google Scholar] [CrossRef]
- Zhou, X.-R.; Wang, X.; Jin, R.-X. Analysis and Design of the Warning Process of the Road Slope Monitoring System; Springer International Publishing: Cham, Switzerland, 2017; pp. 316–320. [Google Scholar] [CrossRef]
- Tang, Z.; Zhou, B.; Wu, F.; Zhou, W.; Xin, Y. The study and application of GIS-based district level high slope monitoring and warning information system. In Proceedings of the 2011 International Conference on Electric Technology and Civil Engineering (ICETCE), Lushan, China, 22–24 April 2011; pp. 3688–3690. [Google Scholar] [CrossRef]
- Oh, K.J.; Kim, T.Y.; Lee, H.Y.; Lee, H. Using Neural Networks to Support Early Warning System for Financial Crisis Forecasting; Springer Berlin Heidelberg: Berlin, Heidelberg, 2005; Volume 3809, pp. 284–296. [Google Scholar]
- Ng, S.M.; Ismail, M.A.M.; Abustan, I. Development of Groundwater Level Fluctuation Response System Subjected to Rainfall for Slope Stability Forecasting. J. Geol. Soc. India 2020, 96, 616–622. [Google Scholar] [CrossRef]
- Huang, H.; Yan, Z.; Zhang, X.; Wu, Q.; Zhu, G.; Zhang, Y.; Huang, Y. Study on dynamic monitoring system of high slope based on the internet of things. In Proceedings of the 2016 IEEE International Conference on Cloud Computing and Big Data Analysis (ICCCBDA), Chengdu, China, 5–7 July 2016; pp. 407–412. [Google Scholar]
- Ahmed, B.; Rahman, M.S.; Islam, R.; Sammonds, P.; Zhou, C.; Uddin, K.; Al-Hussaini, T.M. Developing a Dynamic Web-GIS Based Landslide Early Warning System for the Chittagong Metropolitan Area, Bangladesh. Int. J. Geo-Inf. 2018, 7, 485. [Google Scholar] [CrossRef] [Green Version]
- Dixon, N.; Smith, A.; Flint, J.A.; Khanna, R.; Clark, B.; Andjelkovic, M. An acoustic emission landslide early warning system for communities in low-income and middle-income countries. Landslides 2018, 15, 1631–1644. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Lu, Z.; Zhang, Q.; de la Fuente, J. Large-area landslide detection and monitoring with ALOS/PALSAR imagery data over Northern California and Southern Oregon, USA. Remote Sens. Env. 2012, 124, 348–359. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, X.; Pei, X.; Wang, S.; Huang, R.; Xu, Q.; Wang, Z. Model test study on the hydrological mechanisms and early warning thresholds for loess fill slope failure induced by rainfall. Eng. Geol. 2019, 258, 105135. [Google Scholar] [CrossRef]
- Thai-Van, H.; Bakhos, D.; Bouccara, D.; Loundon, N.; Marx, M.; Mom, T.; Mosnier, I.; Roman, S.; Villerabel, C.; Vincent, C.; et al. Telemedicine in Audiology. Best practice recommendations from the French Society of Audiology (SFA) and the French Society of Otorhinolaryngology-Head and Neck Surgery (SFORL). Eur. Ann. Otorhinolaryngol. Head Neck Dis. 2021, 138, 363–375. [Google Scholar] [CrossRef]
- Zhao, B.; Dai, Q.; Han, D.; Dai, H.; Mao, J.; Zhuo, L. Probabilistic thresholds for landslides warning by integrating soil moisture conditions with rainfall thresholds. J. Hydrol. 2019, 574, 276–287. [Google Scholar] [CrossRef]
- Zhang, D.; Wei, K.; Yao, Y.; Yang, J.; Zheng, G.; Li, Q. Capture and Prediction of Rainfall-Induced Landslide Warning Signals Using an Attention-Based Temporal Convolutional Neural Network and Entropy Weight Methods. Sensors 2022, 22, 6240. [Google Scholar] [CrossRef]
- Zhang, D.; Luo, D. Assessment of agricultural drought loss using a skewed grey cloud ordered clustering model. Nat. Hazards 2022, 114, 2787–2810. [Google Scholar] [CrossRef]
- Gallego, A.-J.; Gil, P.; Pertusa, A.; Fisher, R.B. Semantic Segmentation of SLAR Imagery with Convolutional LSTM Selectional AutoEncoders. Remote. Sens. 2019, 11, 1402. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K. Flood season segmentation and scheme optimization in the Yellow River. J. Water Clim. Change 2022, 13, 274–286. [Google Scholar] [CrossRef]
- Zhu, C.; Xu, Y.Z.; Wu, Y.X.; He, M.C.; Zhu, C.Q.; Meng, Q.X.; Lin, Y. A hybrid artificial bee colony algorithm and support vector machine for predicting blast-induced ground vibration. Earthq. Eng. Eng. Vib. 2022, 21, 861–876. [Google Scholar] [CrossRef]
- Bao, Y.; Chen, J.; Su, L.; Zhang, W.; Zhan, J. A novel numerical approach for rock slide blocking river based on the CEFDEM model: A case study from the Samaoding paleolandslide blocking river event. Eng. Geol. 2023, 312, 106949. [Google Scholar] [CrossRef]
- Song, S.; Zhao, M.; Zhu, C.; Wang, F.; Cao, C.; Li, H.; Ma, M. Identification of the Potential Critical Slip Surface for Fractured Rock Slope Using the Floyd Algorithm. Remote. Sens. 2022, 14, 1284. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, C.; He, M.; Dong, M.; Zhang, G.; Zhang, F. Failure Mechanism and Long Short-Term Memory Neural Network Model for Landslide Risk Prediction. Remote. Sens. 2022, 14, 166. [Google Scholar] [CrossRef]
- Chen, S.; Lin, Y.; Liu, Y.; Lu, Z.-F. Image segmentation by multi-threshold based on Fisher function and histogram algorithm. In 2010 International Conference on Computer Application and System Modeling (ICCASM 2010); IEEE: Piscataway, NJ, USA, 2010; Volume 12, pp. V12-269–V12-272. [Google Scholar] [CrossRef]
- Pfeiffer, J.; Zieher, T.; Bremer, M.; Wichmann, V.; Rutzinger, M. Derivation of three-dimensional displacement vectors from multi-temporal long-range terrestrial laser scanning at the Reissenschuh landslide (Tyrol, Austria). Remote Sens. 2018, 10, 1688. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Wang, Z.; Ye, A.; Liu, K.; Wang, X.; Wang, L. Hydrological characteristic-based methodology for dividing flood seasons: An empirical analysis from China. Environ. Earth Sci. 2019, 78, 1–9. [Google Scholar] [CrossRef]
- Hassan, A.R.; Bhuiyan, M.I.H. Automatic sleep scoring using statistical features in the EMD domain and ensemble methods. Biocybern. Biomed. Eng. 2016, 36, 248–255. [Google Scholar] [CrossRef]
- Zhang, C.; Xie, Y.; Liu, D.; Wang, L. Fast Threshold Image Segmentation Based on 2D Fuzzy Fisher and Random Local Optimized QPSO. IEEE Trans. Image Process. 2017, 26, 1355–1362. [Google Scholar] [CrossRef]
- Wang, S.; Ning, Y.; Shi, H.; Chen, X. A new uncertain linear regression model based on slope mean. J. Intell. Fuzzy Syst. Appl. Eng. Technol. 2021, 40, 10465–10474. [Google Scholar] [CrossRef]
- Ping, Y.; Zhongzhan, Z.; Jiang, D. Robust estimation for partial functional linear additive model based on modal regression. Sci. Sin. Math. 2019, 49, 799. [Google Scholar] [CrossRef] [Green Version]
- Tsukuma, H. Exact finite-sample bias and MSE reduction in a simple linear regression model with measurement error. Jpn. J. Stat. Data Sci. 2019, 2, 1–29. [Google Scholar] [CrossRef]
- Xiao, J.; Yu, P.; Song, X.; Zhang, Z. Statistical inference in the partial functional linear expectile regression model. Sci. China Math. 2022, 65, 2601–2630. [Google Scholar] [CrossRef]
- Du, S.; Zhang, J.; Deng, Z.; Li, J. A New Approach of Geological Disasters Forecasting using Meteorological Factors based on Genetic Algorithm Optimized BP Neural Network. Elektron. Elektrotechnika 2014, 20, 57–62. [Google Scholar] [CrossRef] [Green Version]
- Loew, S.; Gschwind, S.; Gischig, V.; Keller-Signer, A.; Valenti, G. Monitoring and early warning of the 2012 Preonzo catastrophic rockslope failure. Landslides 2017, 14, 141–154. [Google Scholar] [CrossRef]
- Naidu, S.; Sajinkumar, K.; Oommen, T.; Anuja, V.; Samuel, R.A.; Muraleedharan, C. Early warning system for shallow landslides using rainfall threshold and slope stability analysis. Geosci. Front. 2018, 9, 1871–1882. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Indicators | Meanings |
|---|---|---|
| Number one | Point speed | The maximum speed under all grids in the slope DEM model |
| Number two | Linear speed | The sum of speeds in the grids passed by terrain lines in the slope DEM model |
| Number three | Surface speed | The sum of deformation speeds along the same direction under all grids in the slope DEM model |
| Number four | Point acceleration | The maximum acceleration under all grids in the slope DEM model |
| Number five | Linear acceleration | The sum of accelerations in the grids passed by terrain lines in the slope DEM model |
| Number six | Surface acceleration | The sum of deformation accelerations along the same direction under all grids in the slope DEM model |
| Early Warning Level | Point Scale | Linear Scale | Surface Scale |
|---|---|---|---|
| Non-occurrence | (0, 59.2) | (0.122.29) | (0.369.31) |
| Blue warning | (59.2, 67.78) | (122.29, 159.45) | (369.31, 428.96) |
| Yellow warning | (67.78, 84.66) | (159.45, 169.28) | (428.96, 448.41) |
| Orange warning | (84.66, 85.84) | (169.28, 220.93) | (448.41, 923.7) |
| Red warning | (85.44, +∞) | (220.93, +∞) | (923.7, +∞) |
| Early Warning Level | Point Scale | Linear Scale | Surface Scale |
|---|---|---|---|
| Non-occurrence | (0.137.95) | (0.214.04) | (0.980.11) |
| Blue warning | (137.95, 153.82) | (214.04, 224.90) | (980.11, 1038.16) |
| Yellow warning | (153.82, 200.35) | (224.90, 235.44) | (1038.16, 2164.63) |
| Orange warning | (200.35, 769.14) | (235.44, 587.86) | (2164.63, 9492.75) |
| Red warning | (769.14, +∞) | (587.86, +∞) | (9492.75, +∞) |
| Warning Levels | Actual Times (d) | Predicted Times (d) | Error | Accuracy |
|---|---|---|---|---|
| Blue warning | 8 | 31 | / | / |
| Yellow warning | 110 | 99 | 10% | 90% |
| Orange warning | 2 | 3 | 50% | 50% |
| Red warning | 25 | 43 | 72% | 28% |
| Non-occurrence | 163 | 132 | 19.02% | 80.98% |
| Occurrence | 145 | 176 | 21.38% | 78.62% |
| Spatial and Scale | Blue Warning | Yellow Warning | Orange Warning | Red Warning | Occurrence | Non-Occurrence |
|---|---|---|---|---|---|---|
| Point scale and 100 grids | /– | 90% | 50% | 28% | 78.62% | 80.98% |
| Linear scale and 100 grids | / | 88.89% | 94.74% | 100% | 79.37% | 85.71% |
| Surface scale and 100 grids | 84.21% | 100% | 62.96% | 100% | 92.41% | 93.25% |
| Point scale and 200 grids | 36% | 85.19% | 81.77% | 72.55% | 89.63% | 87.5% |
| Linear scale and 200 grids | 47.89% | 88.89% | 20% | 100% | 91.84% | 84.62% |
| Surface scale and 200 grids | 57.14% | 91.67% | 100% | 100% | 97.44% | 97.22% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Lei, T.; Qin, J.; Wang, J.; Wang, W.; Liu, B.; Chen, D.; Qian, G.; Zhang, L.; Lu, J. The Method of Segmenting the Early Warning Thresholds Based on Fisher Optimal Segmentation. Land 2023, 12, 344. https://doi.org/10.3390/land12020344
Li X, Lei T, Qin J, Wang J, Wang W, Liu B, Chen D, Qian G, Zhang L, Lu J. The Method of Segmenting the Early Warning Thresholds Based on Fisher Optimal Segmentation. Land. 2023; 12(2):344. https://doi.org/10.3390/land12020344
Chicago/Turabian StyleLi, Xiangyu, Tianjie Lei, Jing Qin, Jiabao Wang, Weiwei Wang, Baoyin Liu, Dongpan Chen, Guansheng Qian, Li Zhang, and Jingxuan Lu. 2023. "The Method of Segmenting the Early Warning Thresholds Based on Fisher Optimal Segmentation" Land 12, no. 2: 344. https://doi.org/10.3390/land12020344