An LMI Approach to Nonlinear State-Feedback Stability of Uncertain Time-Delay Systems in the Presence of Lipschitzian Nonlinearities


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- -
- Design of a nonlinear state-feedback stabilizing controller for nonlinear systems in the presence of time delays, Lipschitz nonlinearity, and parametric uncertainties.
- -
- Achievement of asymptotic stabilization based on the Lyapunov–Krasovskii stabilization theory and the LMI approach.
- -
- The suggested control scheme is rather straightforward; there is no difficulty in the employment of this technique.
- -
- Application of the offered method on a nonlinear unstable system and a rotational inverted pendulum to prove the efficiency of the method.
2. Problem Description
3. Nonlinear State-Feedback Stabilization
4. Simulation and Experimental Results
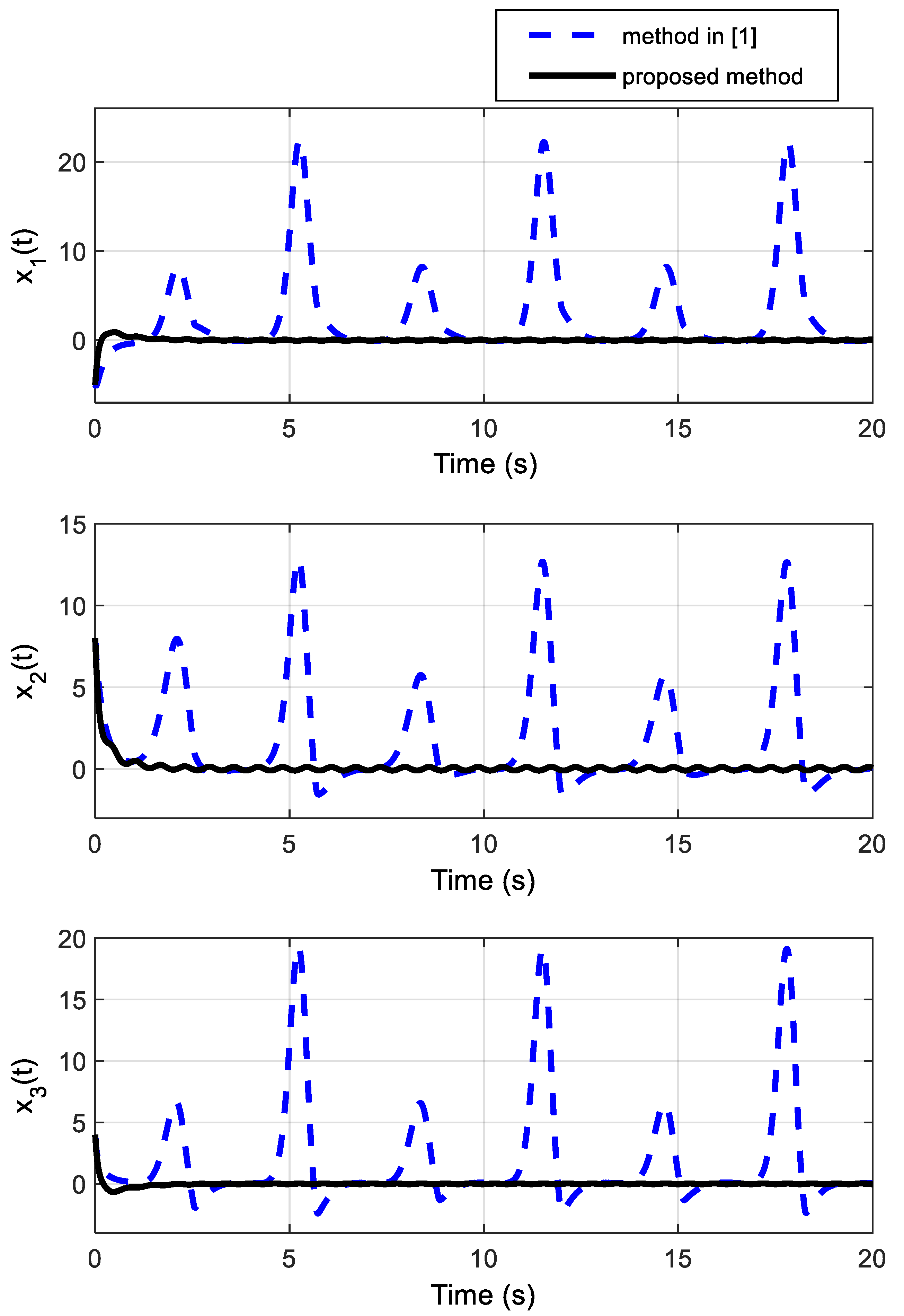
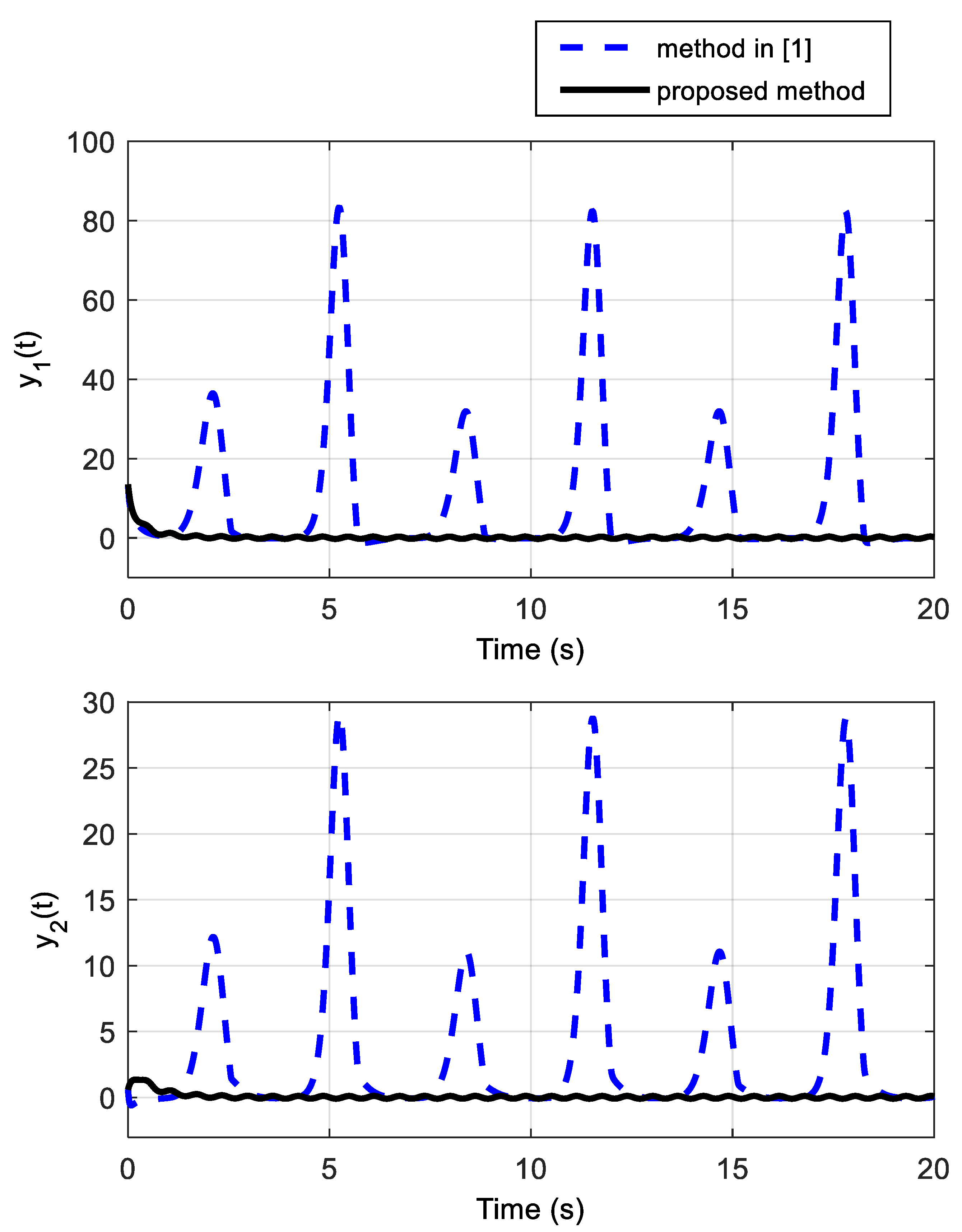
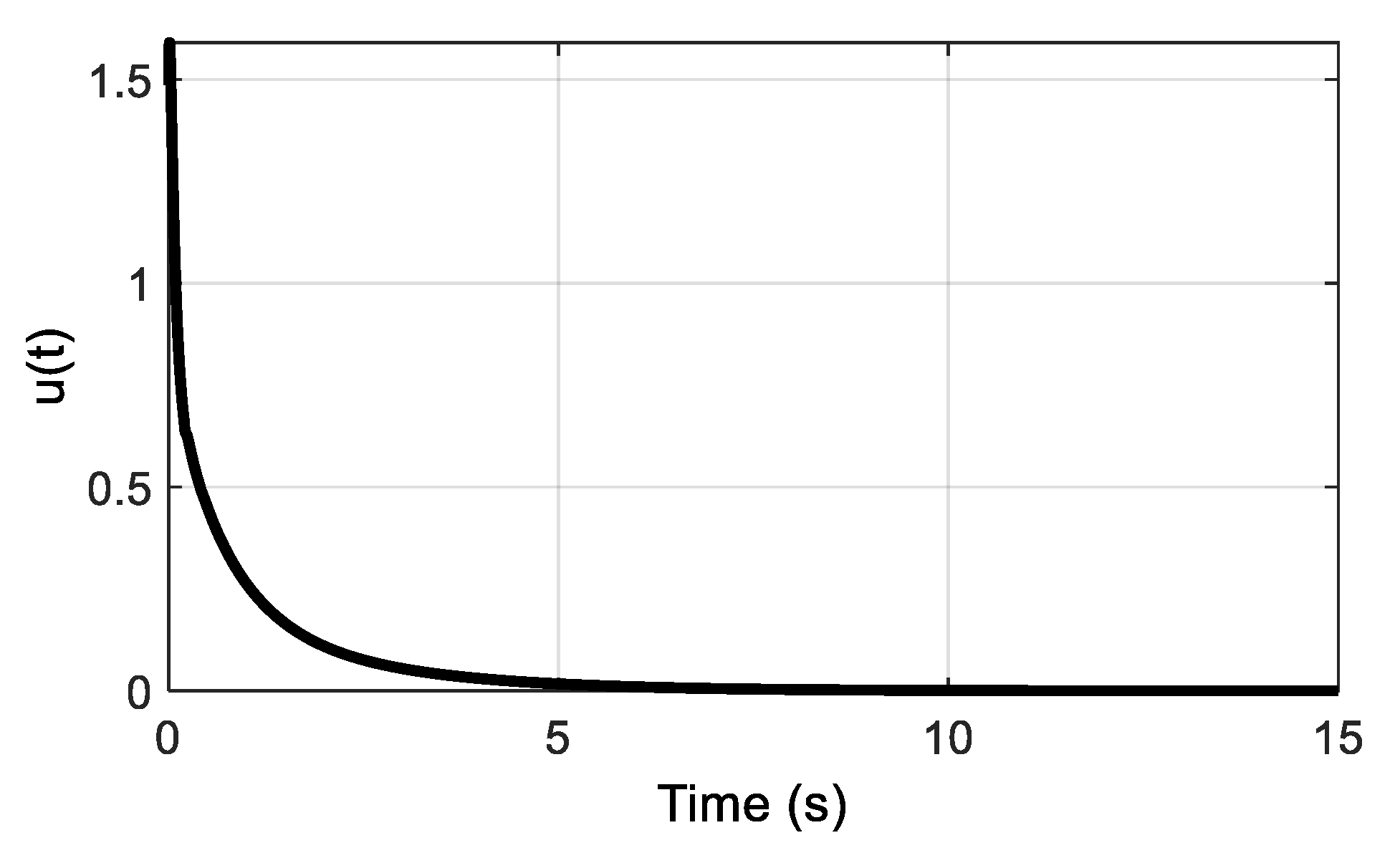
4.1. Example A: Unstable Nonlinear System
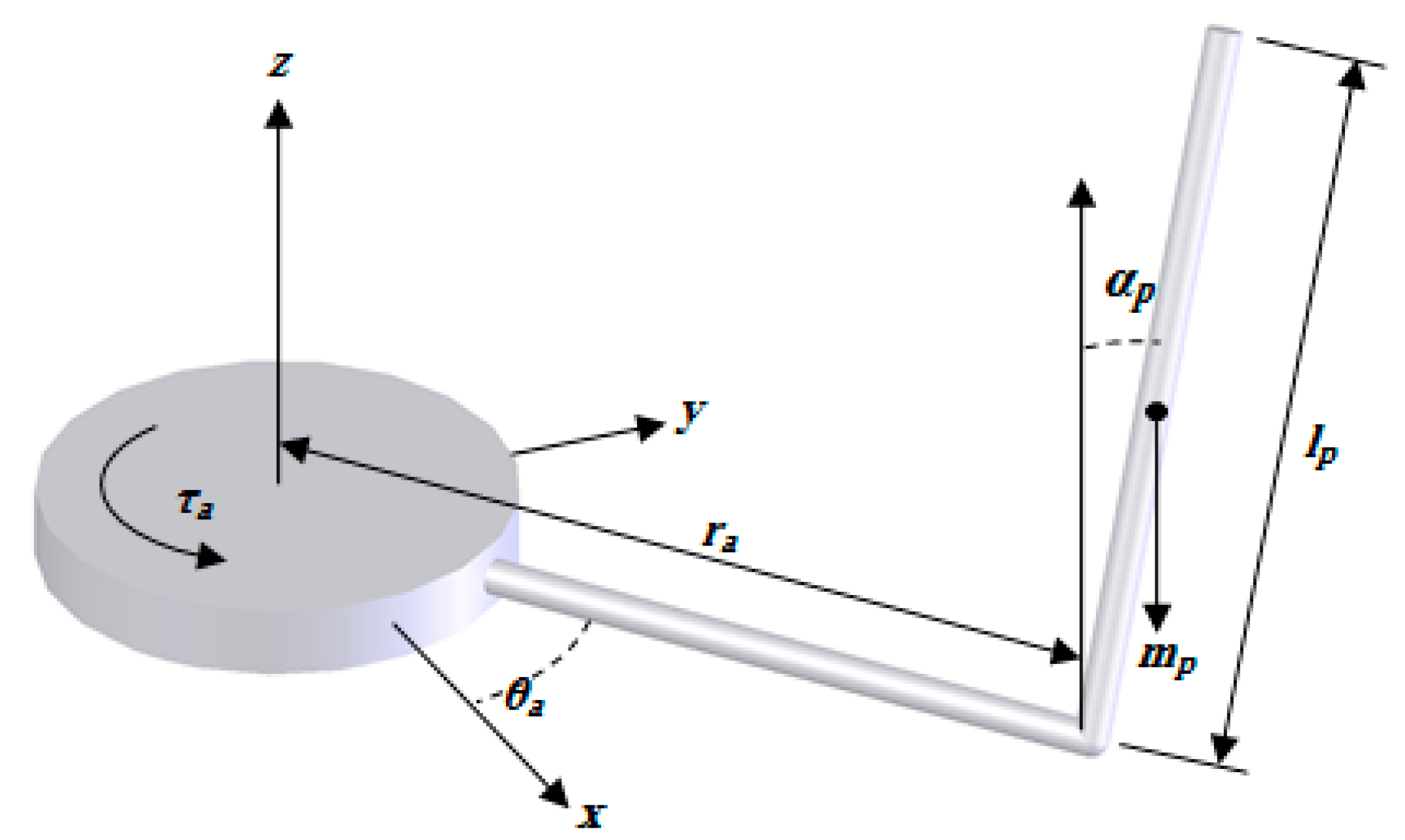
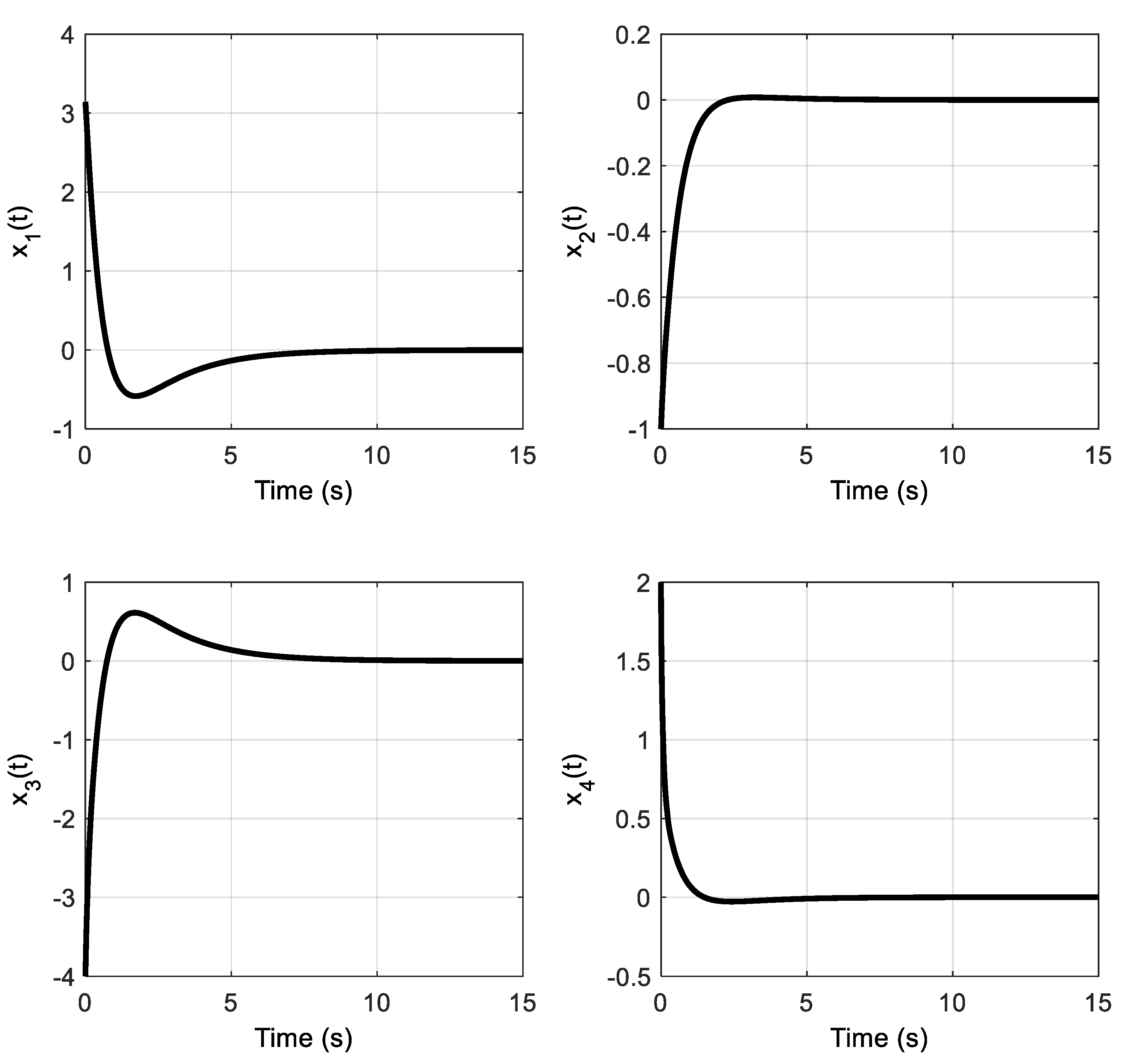
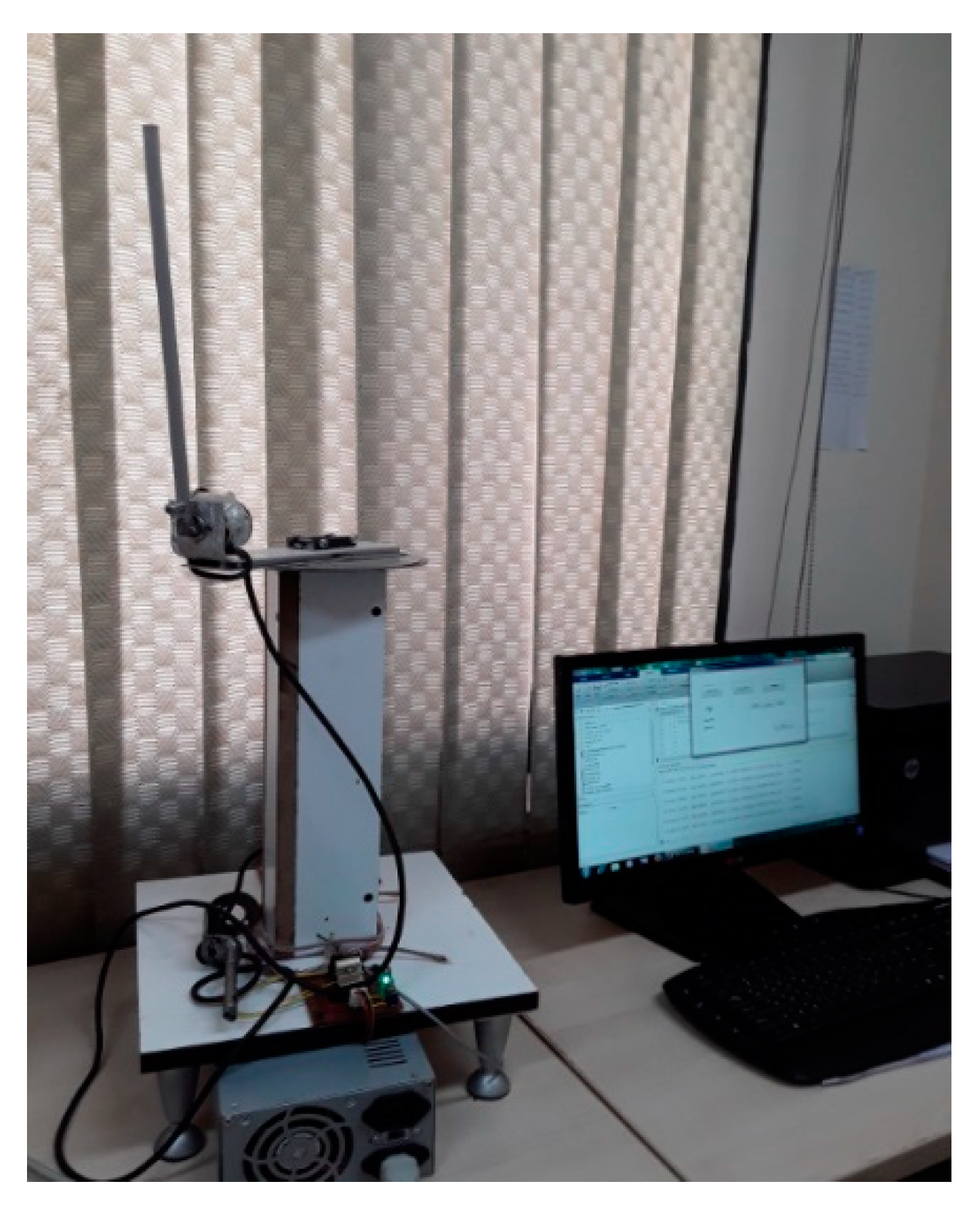
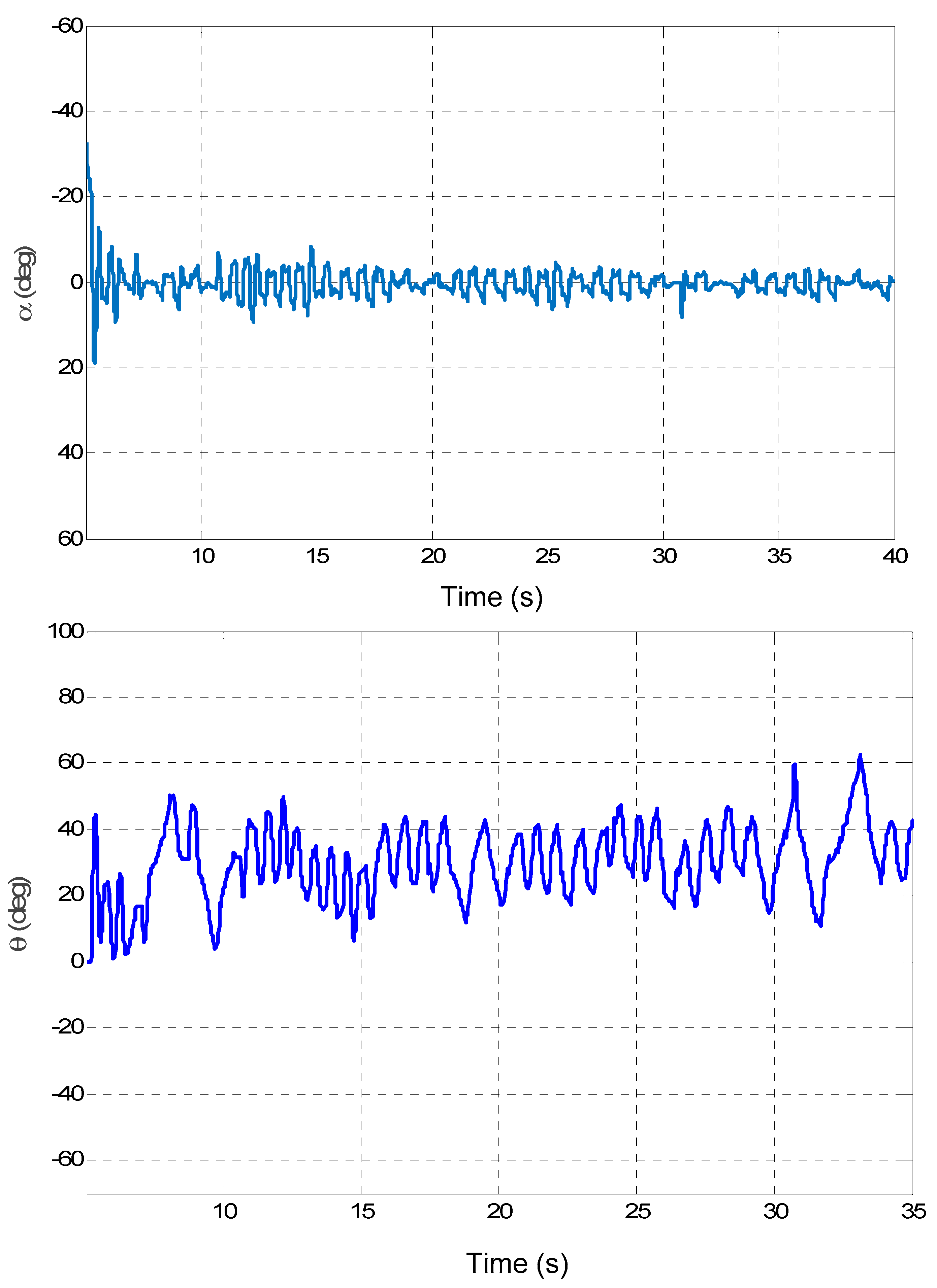
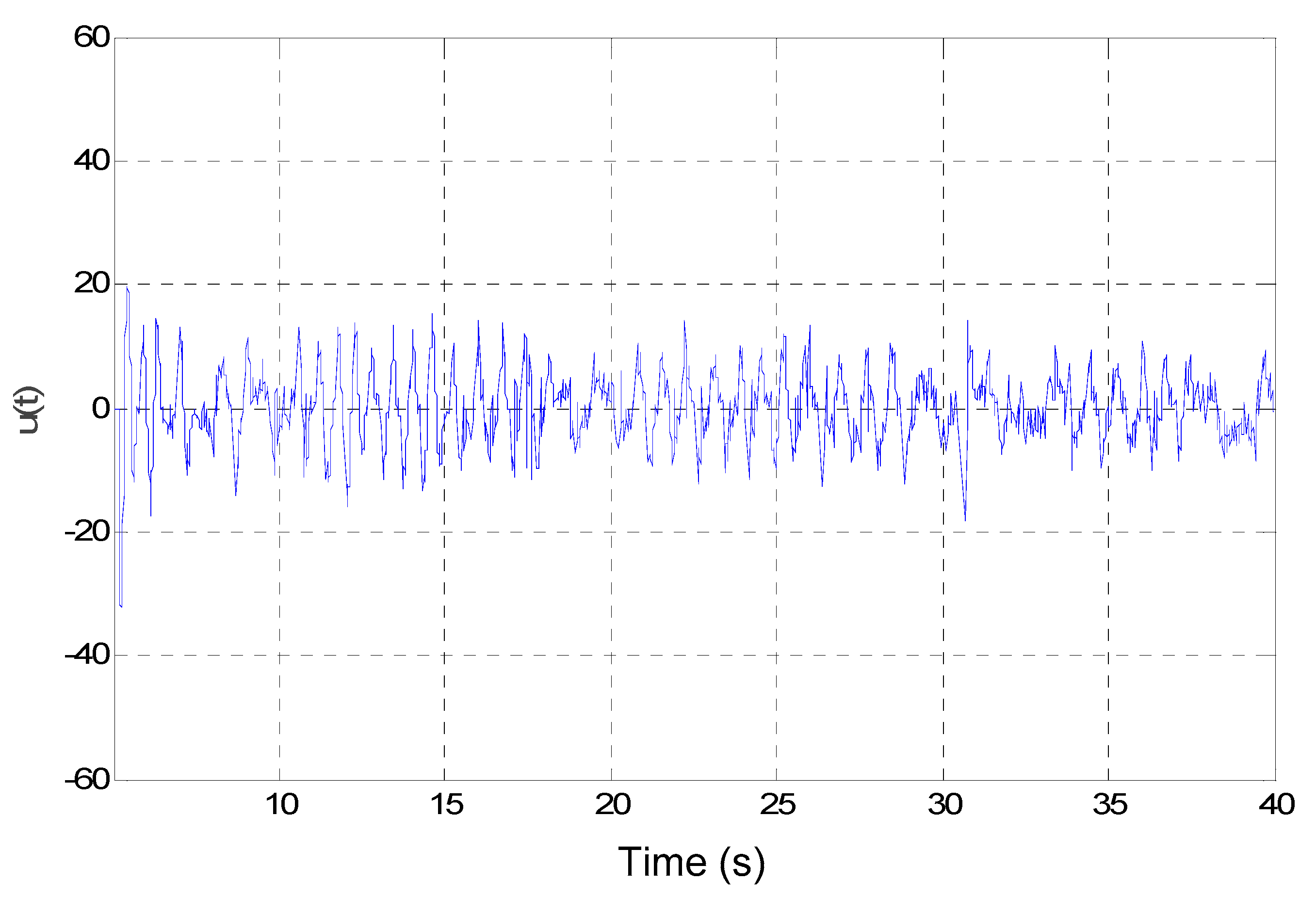
4.2. Example B: A Practical Rotational Inverted Pendulum
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Mobayen, S. Optimal LMI-based state feedback stabilizer for uncertain nonlinear systems with time-Varying uncertainties and disturbances. Complexity 2016, 21, 356–362. [Google Scholar] [CrossRef]
- Huo, Y.; Liu, J.-B. Robust H∞ Control For Uncertain Singular Neutral Time-Delay Systems. Mathematics 2019, 7, 217. [Google Scholar] [CrossRef] [Green Version]
- Emharuethai, C.; Niamsup, P.; Ramachandran, R.; Weera, W. Time-Varying Delayed H∞ Control Problem for Nonlinear Systems: A Finite Time Study Using Quadratic Convex Approach. Symmetry 2020, 12, 713. [Google Scholar] [CrossRef]
- Yao, H. Anti-Saturation Control of Uncertain Time-Delay Systems with Actuator Saturation Constraints. Symmetry 2019, 11, 375. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.-Y.; Song, Z.-B.; Li, T.; Yang, S.-H. Output feedback stabilization for high-order uncertain feedforward time-delay nonlinear systems. J. Frankl. Inst. 2015, 352, 5308–5326. [Google Scholar] [CrossRef]
- Puangmalai, W.; Puangmalai, J.; Rojsiraphisal, T. Robust Finite-Time Control of Linear System with Non-Differentiable Time-Varying Delay. Symmetry 2020, 12, 680. [Google Scholar] [CrossRef]
- Birs, I.; Muresan, C.; Nascu, I.; Ionescu, C. A survey of recent advances in fractional order control for time delay systems. IEEE Access 2019, 7, 30951–30965. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Zhang, B.; Ma, Q. Globally adaptive control for stochastic nonlinear time-delay systems with perturbations and its application. Automatica 2019, 102, 105–110. [Google Scholar] [CrossRef]
- Ruan, Y.; Huang, T. Finite-Time Control for Nonlinear Systems with Time-Varying Delay and Exogenous Disturbance. Symmetry 2020, 12, 447. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.Y.; Liu, Y.G. Adaptive control design for a class of uncertain high-order nonlinear systems with time delay. Asian J. Control 2015, 17, 535–543. [Google Scholar] [CrossRef]
- Sayyaddelshad, S.; Gustafsson, T. H∞ observer design for uncertain nonlinear discrete-time systems with time-delay: LMI optimization approach. Int. J. Robust Nonlinear Control 2015, 25, 1514–1527. [Google Scholar] [CrossRef]
- Dong, Y.; Liu, J. Exponential stabilization of uncertain nonlinear time-delay systems. Adv. Differ. Equ. 2012, 2012, 180. [Google Scholar] [CrossRef] [Green Version]
- Tong, S.-C.; Sheng, N. Adaptive fuzzy observer backstepping control for a class of uncertain nonlinear systems with unknown time-delay. Int. J. Autom. Comput. 2010, 7, 236–246. [Google Scholar] [CrossRef]
- Lien, C.-H.; Yu, K.-W.; Huang, C.-T.; Chou, P.-Y.; Chung, L.-Y.; Chen, J.-D. Robust H∞ control for uncertain T–S fuzzy time-delay systems with sampled-data input and nonlinear perturbations. Nonlinear Anal. Hybrid Syst. 2010, 4, 550–556. [Google Scholar] [CrossRef]
- Goodall, D.P.; Postoyan, R. Output feedback stabilisation for uncertain nonlinear time-delay systems subject to input constraints. Int. J. Control 2010, 83, 676–693. [Google Scholar] [CrossRef]
- Lin, J.; Fei, S.; Gao, Z. Stabilization of discrete-time switched singular time-delay systems under asynchronous switching. J. Frankl. Inst. 2012, 349, 1808–1827. [Google Scholar] [CrossRef]
- Wang, H.; Wu, J.-P.; Sheng, X.-S.; Wang, X.; Zan, P. A new stability result for nonlinear cascade time-delay system and its application in chaos control. Nonlinear Dyn. 2015, 80, 221–226. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, B.; Jiang, Y.; Bie, P.; Li, H. Chance-constrained stochastic congestion management of power systems considering uncertainty of wind power and demand side response. Int. J. Electr. Power Energy Syst. 2019, 107, 703–714. [Google Scholar] [CrossRef]
- Wang, X.; Hou, B. Continuous time-varying feedback control of a robotic manipulator with base vibration and load uncertainty. J. Vib. Control 2020, 1077546320927598. [Google Scholar]
- Wu, Y.; Wang, Y. Asymptotic tracking control of uncertain nonholonomic wheeled mobile robot with actuator saturation and external disturbances. Neural Comput. Appl. 2020, 32, 8735–8745. [Google Scholar] [CrossRef]
- Liu, C.; Cheah, C.C.; Slotine, J.-J.E. Adaptive task-space regulation of rigid-link flexible-joint robots with uncertain kinematics. Automatica 2008, 44, 1806–1814. [Google Scholar] [CrossRef]
- Barbosa, K.A.; De Souza, C.E.; Trofino, A. Robust H2 filtering for uncertain linear systems: LMI based methods with parametric Lyapunov functions. Syst. Control Lett. 2005, 54, 251–262. [Google Scholar] [CrossRef]
- Nobrega, E.G.; Abdalla, M.O.; Grigoriadis, K.M. Robust fault estimation of uncertain systems using an LMI-based approach. Int. J. Robust Nonlinear Control 2008, 18, 1657–1680. [Google Scholar] [CrossRef] [Green Version]
- Hilhorst, G.; Pipeleers, G.; Michiels, W.; Swevers, J. Sufficient LMI conditions for reduced-order multi-objective H2/H∞ control of LTI systems. Eur. J. Control 2015, 23, 17–25. [Google Scholar] [CrossRef] [Green Version]
- Haddad, W.M.; Hui, Q.; Chellaboina, V. H2 optimal semistable control for linear dynamical systems: An LMI approach. J. Frankl. Inst. 2011, 348, 2898–2910. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.-E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.-D.; Valencia-Palomo, G.; López-Estrada, F.-R. Energy-Based Control and LMI-Based Control for a Quadrotor Transporting a Payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Liao, F. Preview Control for MIMO Discrete-Time System with Parameter Uncertainty. Mathematics 2020, 8, 756. [Google Scholar] [CrossRef]
- Zong, G.; Xu, S.; Wu, Y. Robust H∞ stabilization for uncertain switched impulsive control systems with state delay: An LMI approach. Nonlinear Anal. Hybrid Syst. 2008, 2, 1287–1300. [Google Scholar] [CrossRef]
- Leite, V.J.; Tarbouriech, S.; Peres, P.L.D. Robust ∞ state feedback control of discrete-time systems with state delay: An LMI approach. IMA J. Math. Control Inf. 2009, 26, 357–373. [Google Scholar] [CrossRef]
- Tsai, S.-H.; Hsiao, M.-Y.; Li, T.-H.S.; Shih, K.-S.; Chao, C.-H.; Liu, C.-H. LMI-based H∞ state-feedback control for TS time-delay discrete fuzzy bilinear system. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 1033–1038. [Google Scholar]
- Li, P.; Zhong, S.-M.; Cui, J.-Z. Delay-dependent robust BIBO stabilization of uncertain system via LMI approach. Chaos Solitons Fractals 2009, 40, 1021–1028. [Google Scholar] [CrossRef]
- Amri, I.; Soudani, D.; Benrejeb, M. Robust state-derivative feedback LMI-based designs for time-varying delay system. In Proceedings of the 2011 International Conference on Communications, Computing and Control Applications (CCCA), Hammamet, Tunisia, 3–5 March 2011; pp. 1–6. [Google Scholar]
- Yan, Q.; Hou, S.; Zhang, L. Stabilization of Euler-Bernoulli beam with a nonlinear locally distributed feedback control. J. Syst. Sci. Complex. 2011, 24, 1100–1109. [Google Scholar] [CrossRef]
- Thevenet, L.; Buchot, J.-M.; Raymond, J.-P. Nonlinear feedback stabilization of a two-dimensional Burgers equation. ESAIM Control Optim. Calc. Var. 2010, 16, 929–955. [Google Scholar] [CrossRef] [Green Version]
- Petersen, I.R. A stabilization algorithm for a class of uncertain linear systems. Syst. Control Lett. 1987, 8, 351–357. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Rehan, M.; Hong, K.-S.; Ge, S.S. Stabilization and tracking control for a class of nonlinear systems. Nonlinear Anal. Real World Appl. 2011, 12, 1786–1796. [Google Scholar] [CrossRef]
- Majd, V.J.; Mobayen, S. An ISM-based CNF tracking controller design for uncertain MIMO linear systems with multiple time-delays and external disturbances. Nonlinear Dyn. 2015, 80, 591–613. [Google Scholar] [CrossRef]
- Ibrir, S.; Diopt, S. Novel LMI conditions for observer-based stabilization of Lipschitzian nonlinear systems and uncertain linear systems in discrete-time. Appl. Math. Comput. 2008, 206, 579–588. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golestani, M.; Mobayen, S.; HosseinNia, S.H.; Shamaghdari, S. An LMI Approach to Nonlinear State-Feedback Stability of Uncertain Time-Delay Systems in the Presence of Lipschitzian Nonlinearities. Symmetry 2020, 12, 1883. https://doi.org/10.3390/sym12111883
Golestani M, Mobayen S, HosseinNia SH, Shamaghdari S. An LMI Approach to Nonlinear State-Feedback Stability of Uncertain Time-Delay Systems in the Presence of Lipschitzian Nonlinearities. Symmetry. 2020; 12(11):1883. https://doi.org/10.3390/sym12111883
Chicago/Turabian StyleGolestani, Mehdi, Saleh Mobayen, S. Hassan HosseinNia, and Saeed Shamaghdari. 2020. "An LMI Approach to Nonlinear State-Feedback Stability of Uncertain Time-Delay Systems in the Presence of Lipschitzian Nonlinearities" Symmetry 12, no. 11: 1883. https://doi.org/10.3390/sym12111883