
Wind-Induced Vibrations and Gust Response Factors of the Cabin–Cable–Tower System

Abstract
:1. Introduction
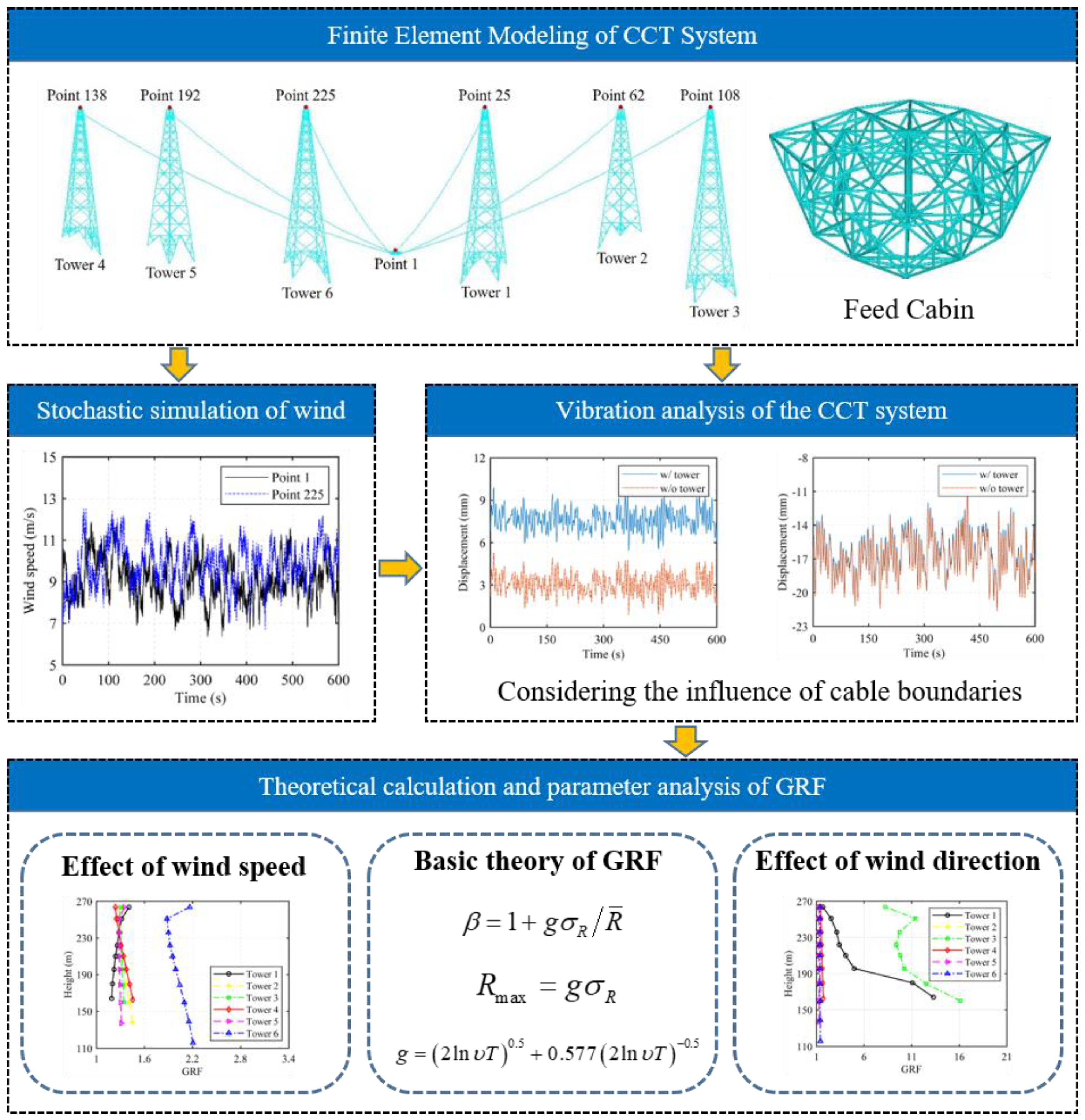
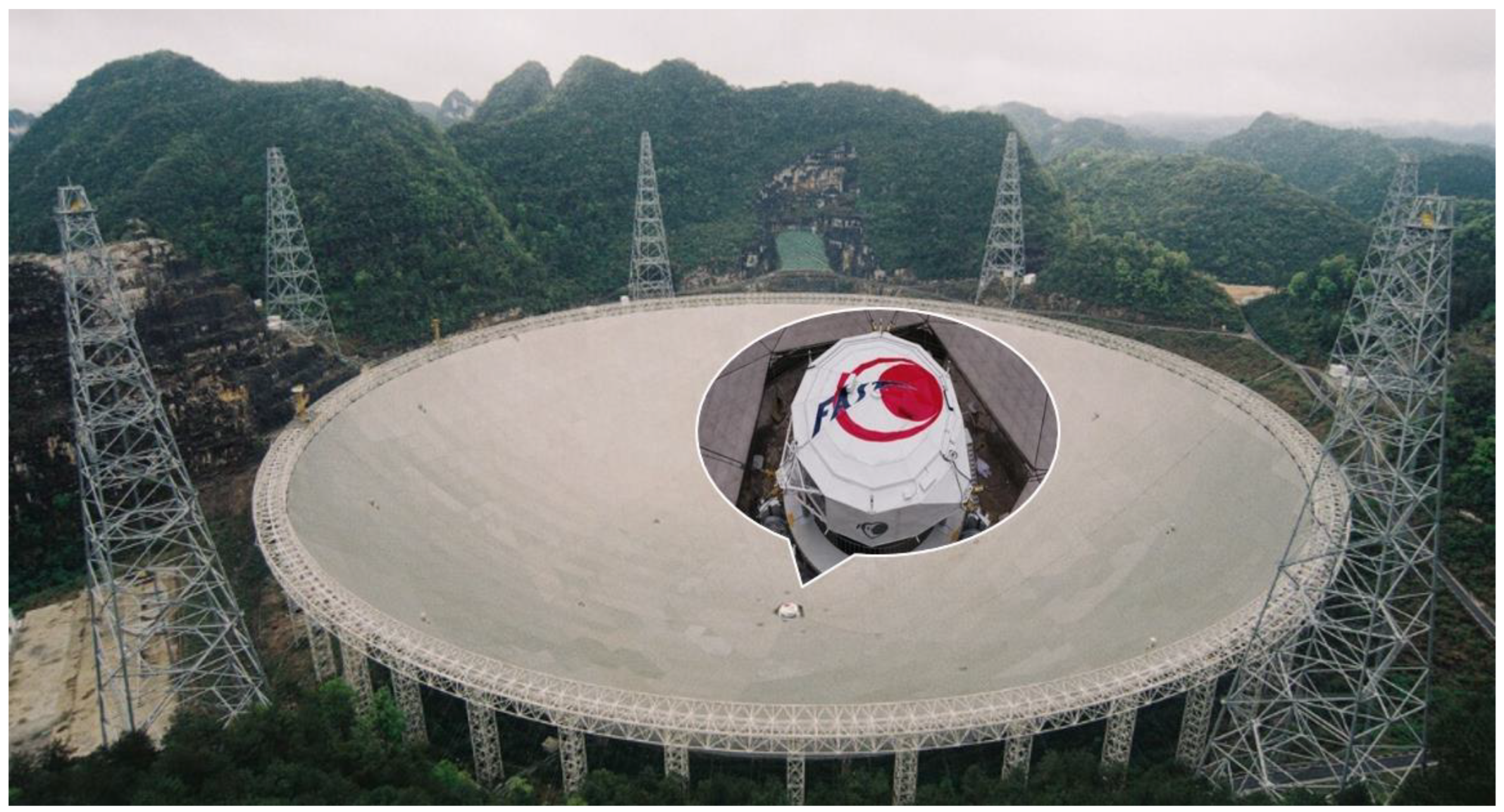
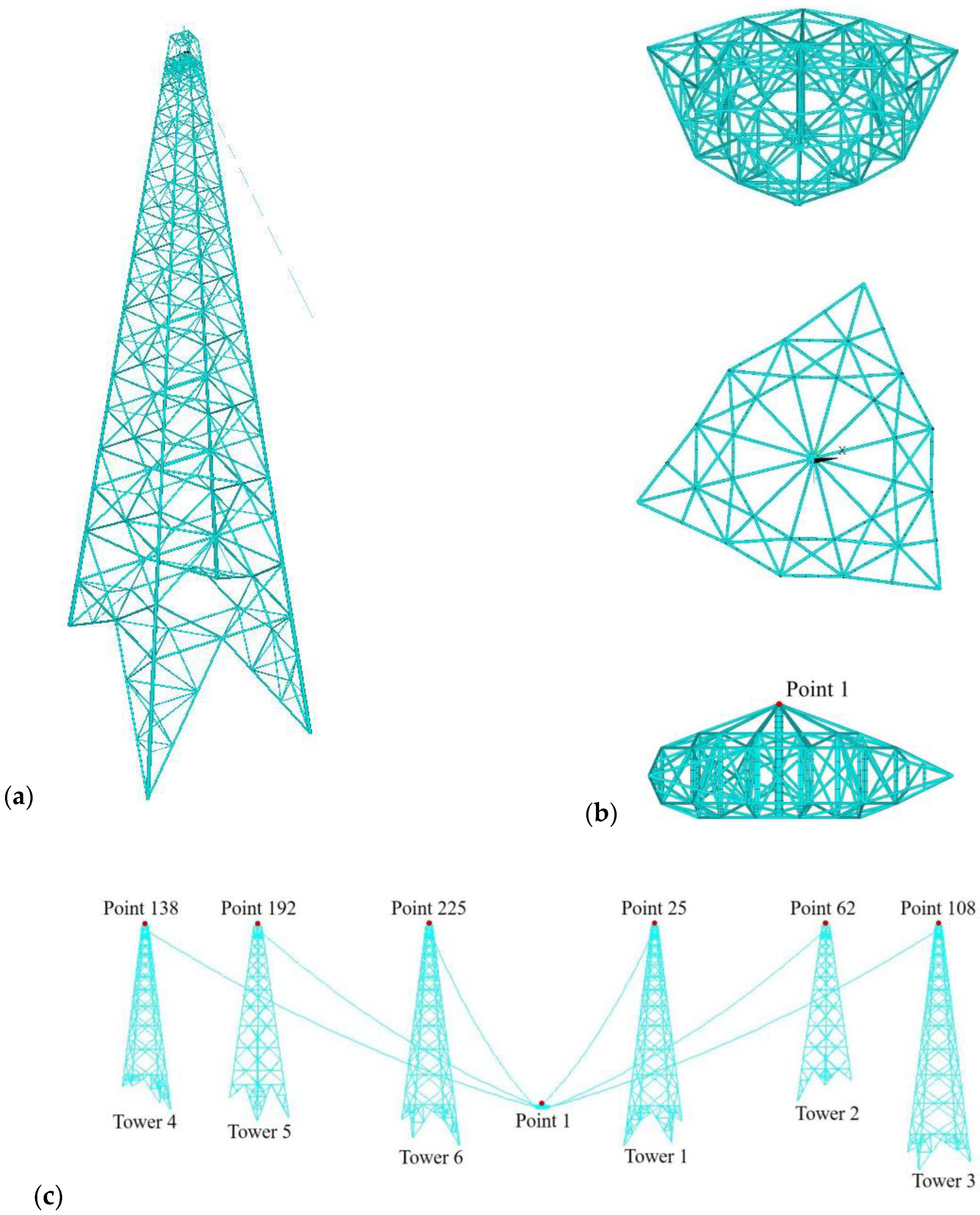
2. Project Overview and Finite Element Model of the CCT System
3. Wind-Induced Vibration of the CCT System
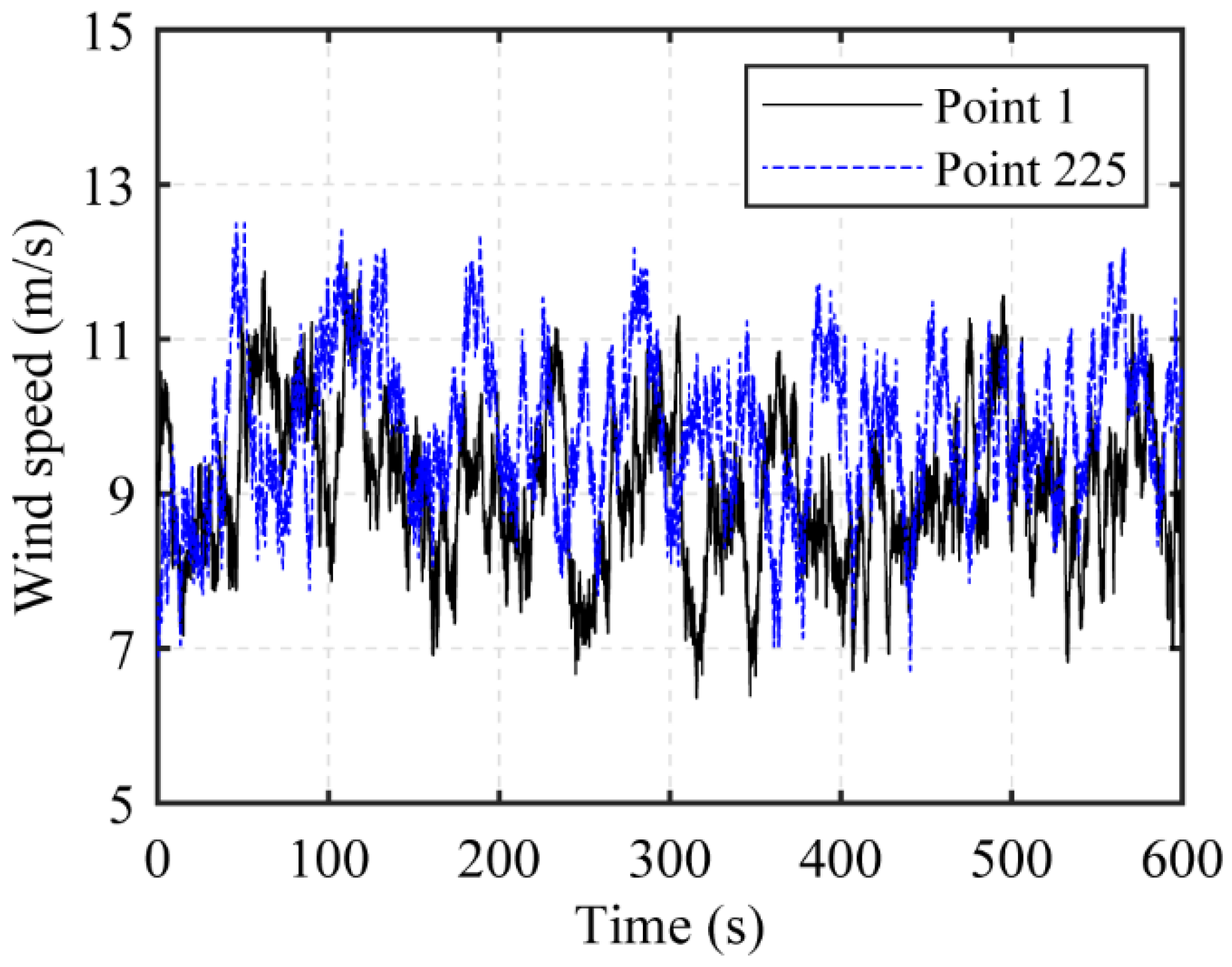
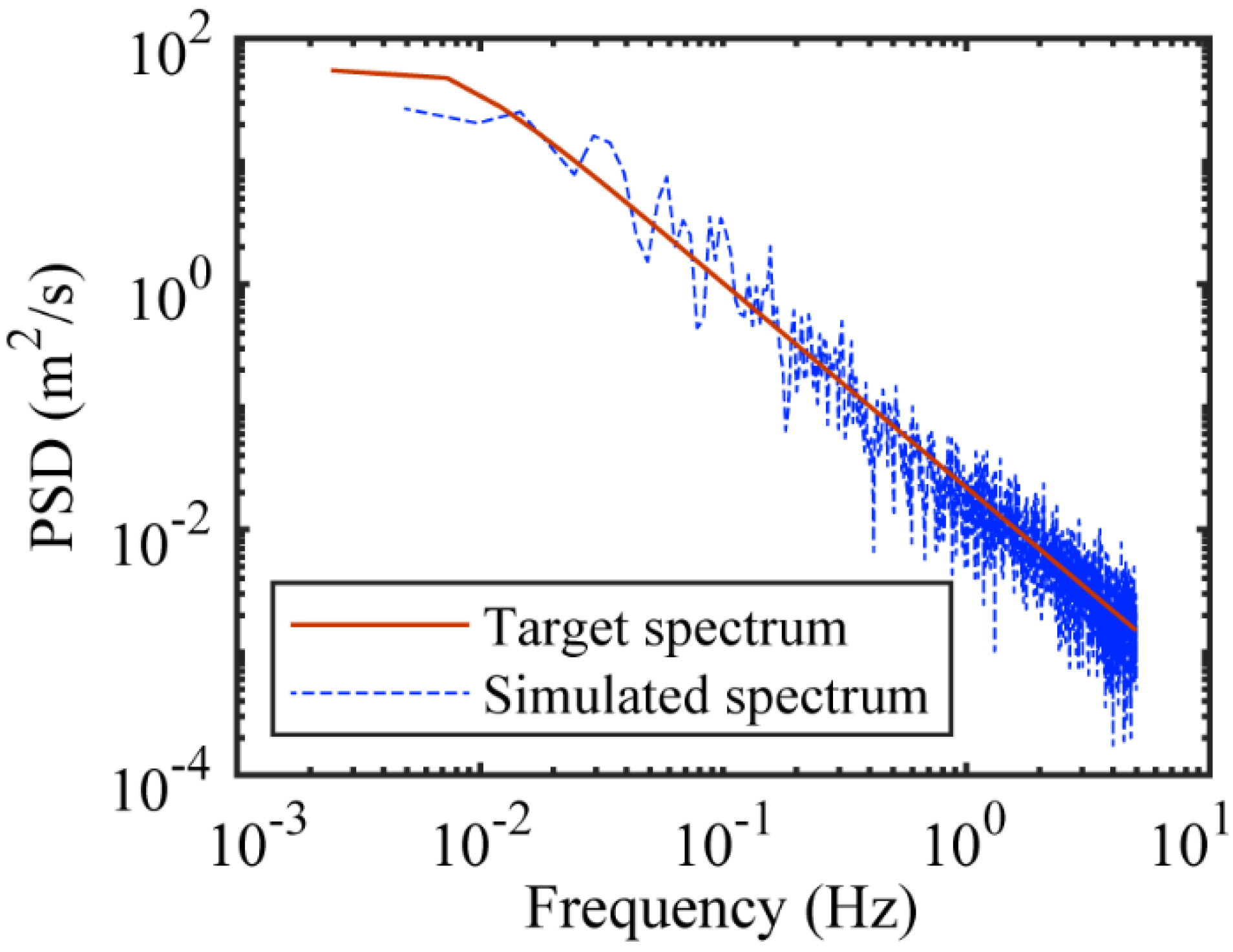
3.1. Stochastic Simulation of Wind Fields
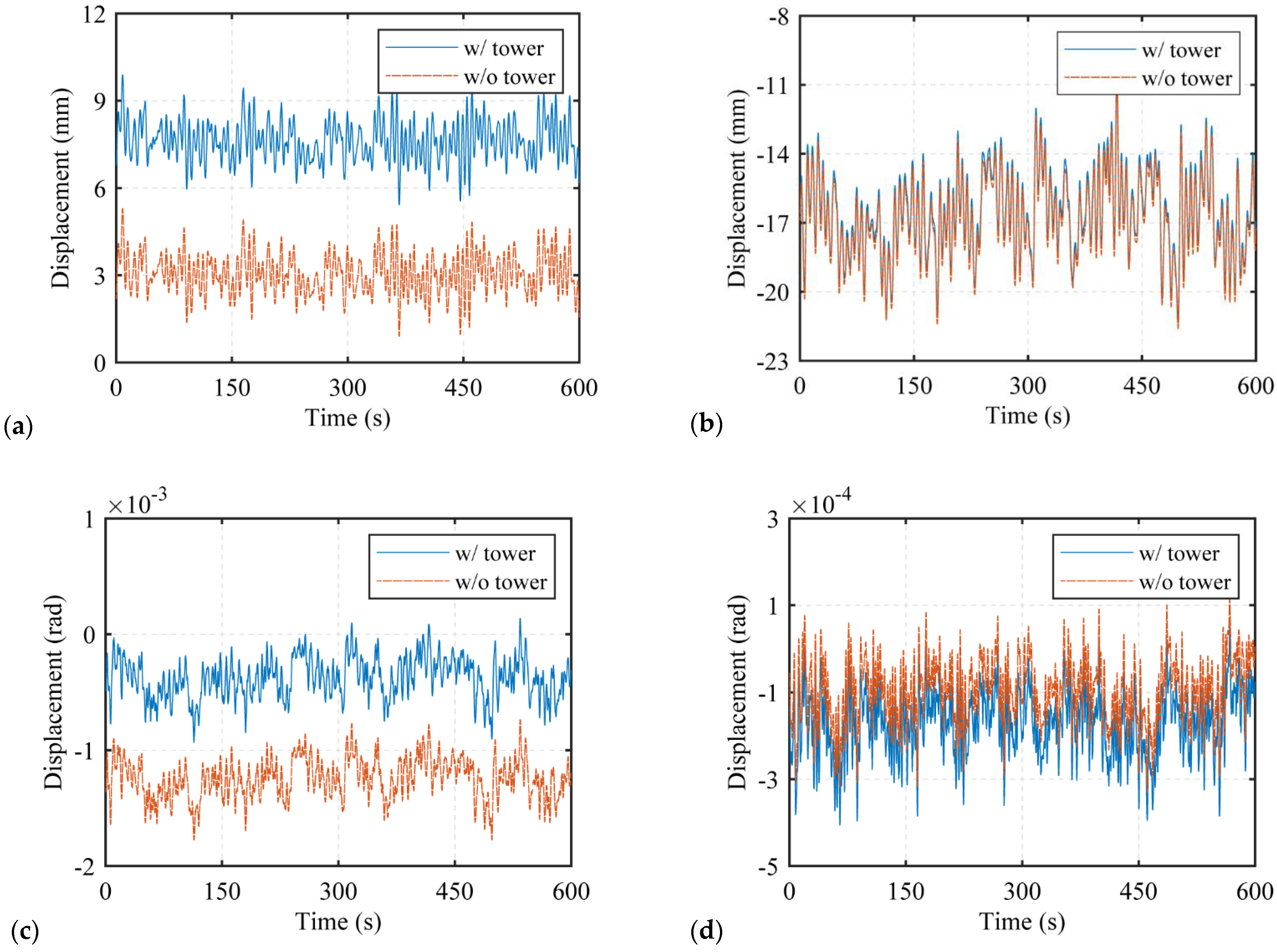
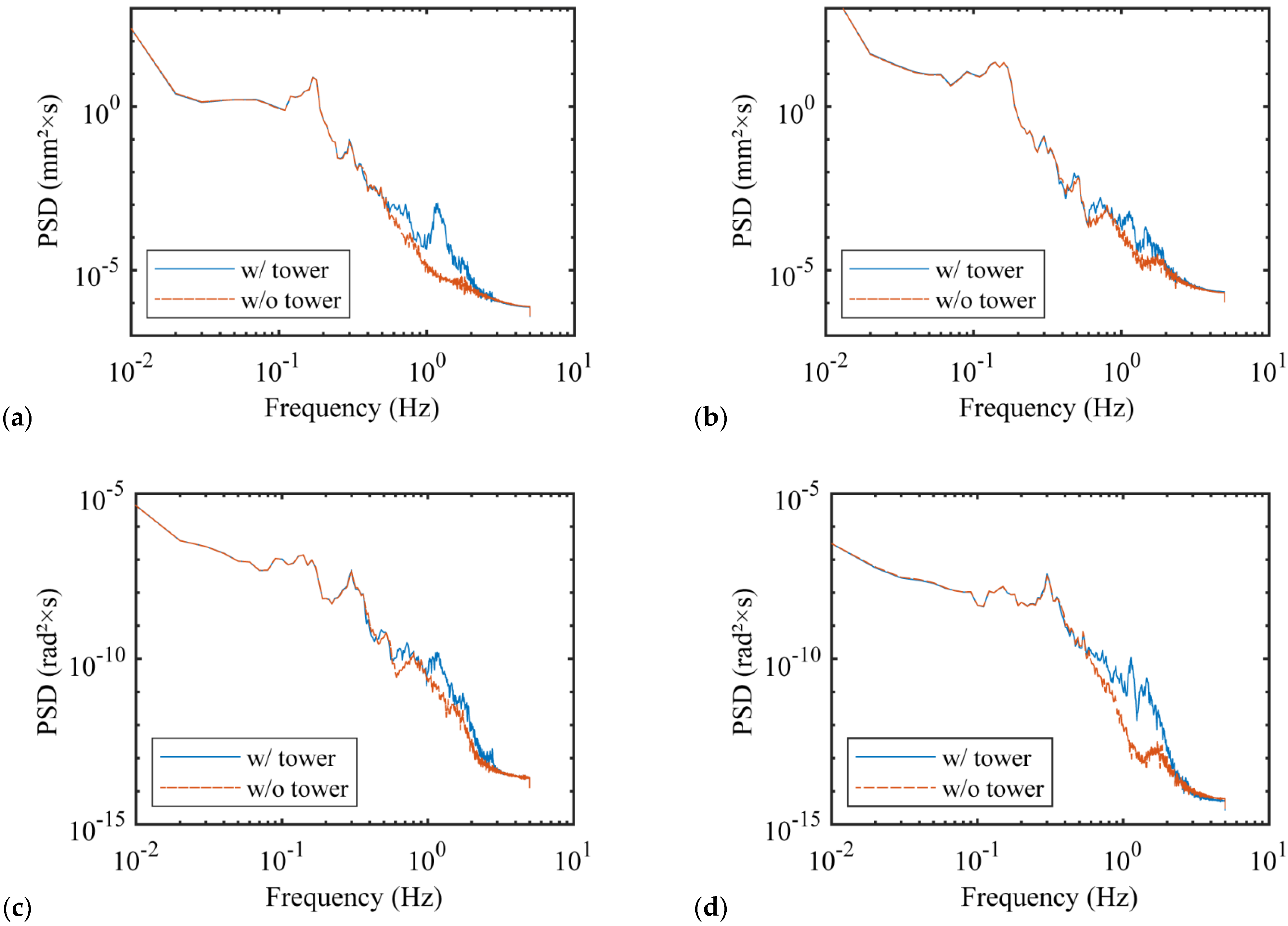
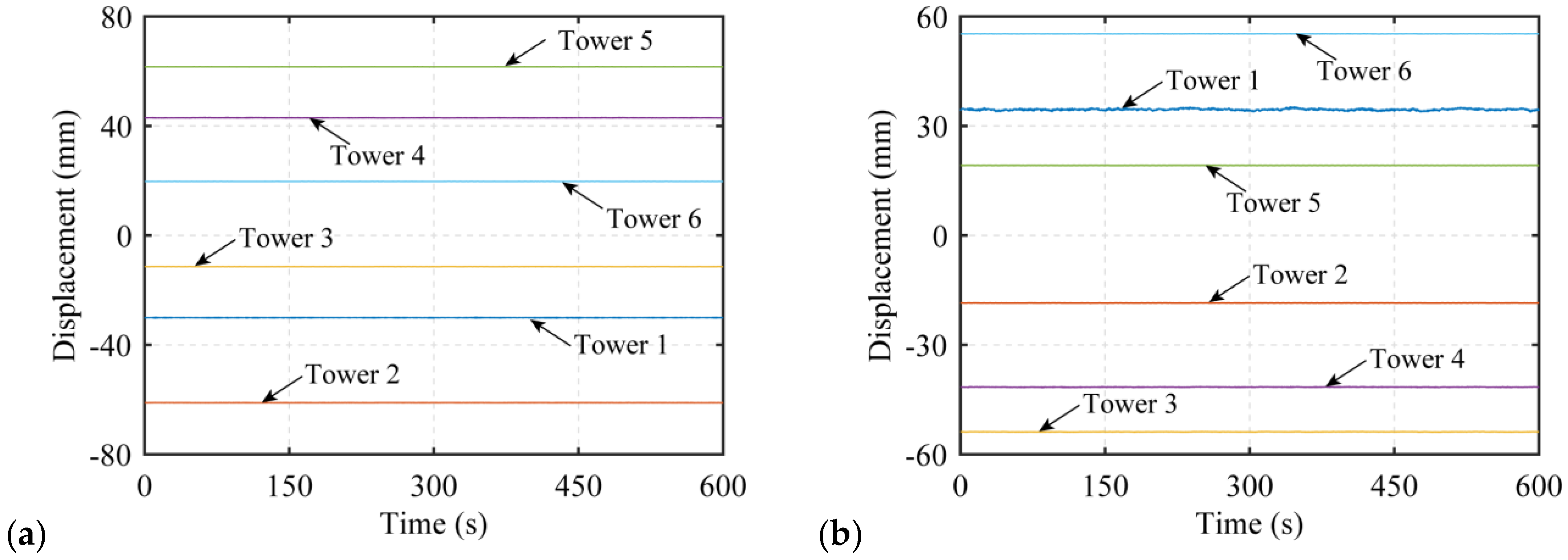
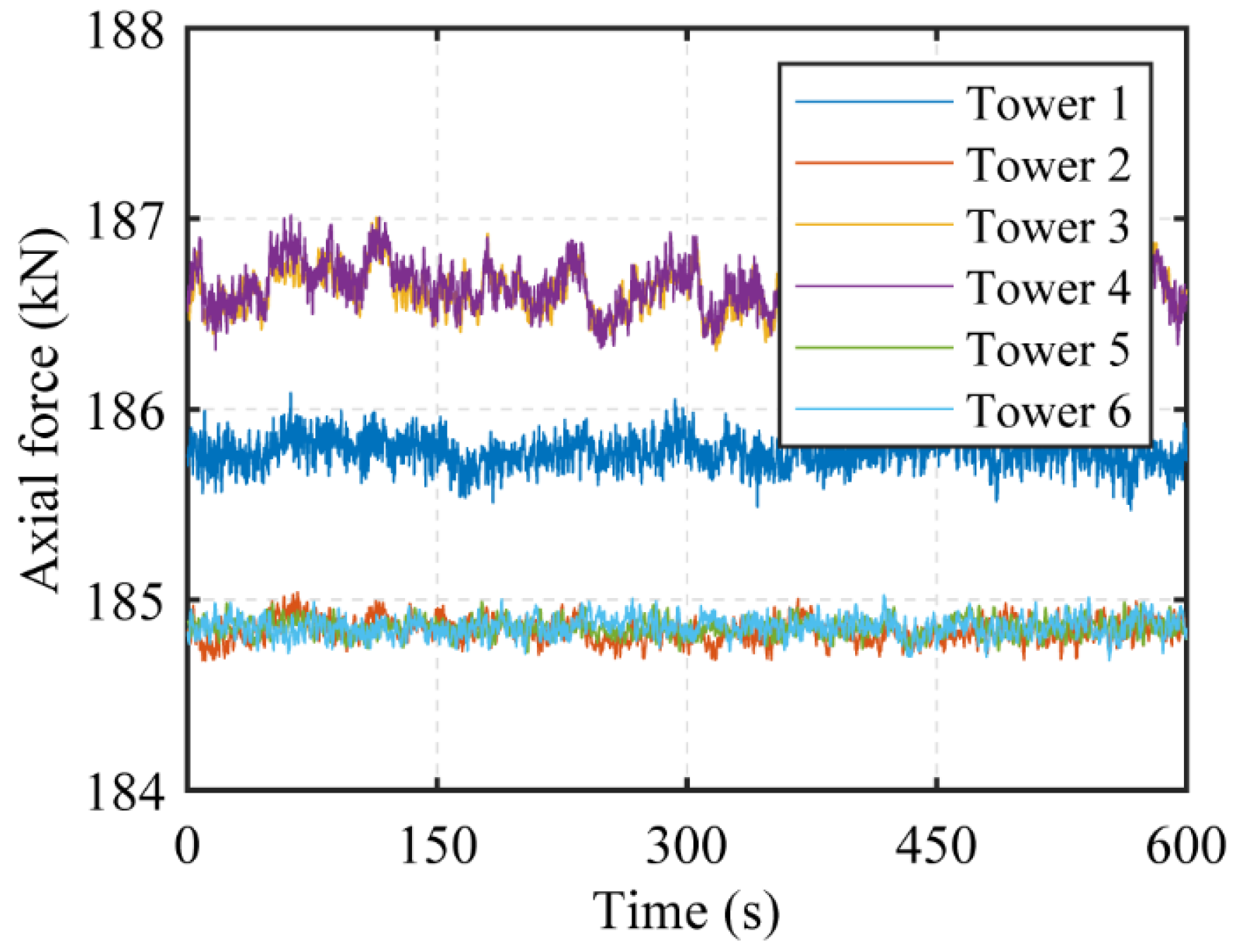
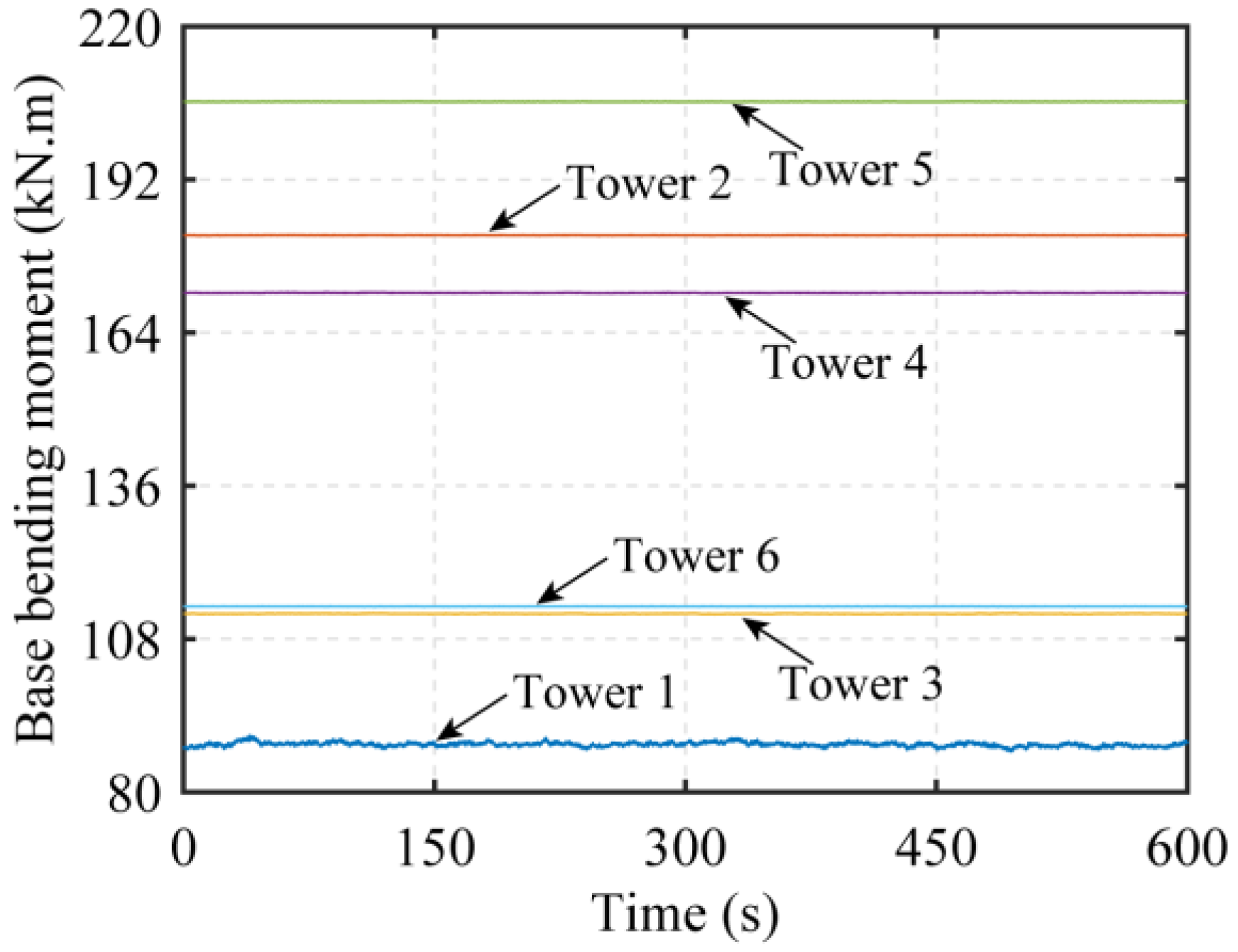
3.2. Vibration Analysis of the CCT System
4. Gust Response Factor
4.1. Basic Theory
4.2. Calculation Results
5. Parametric Analysis on GRF
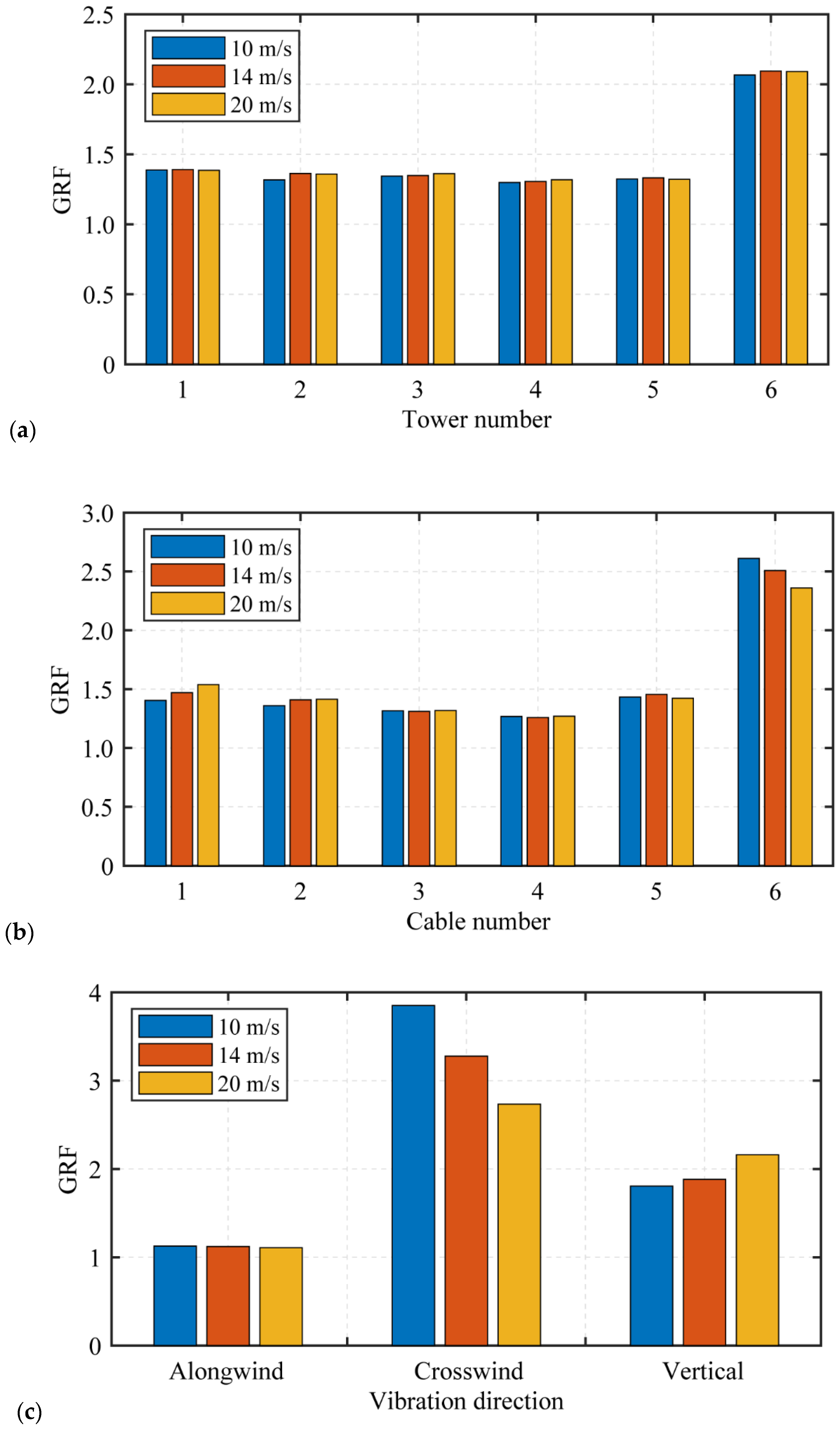
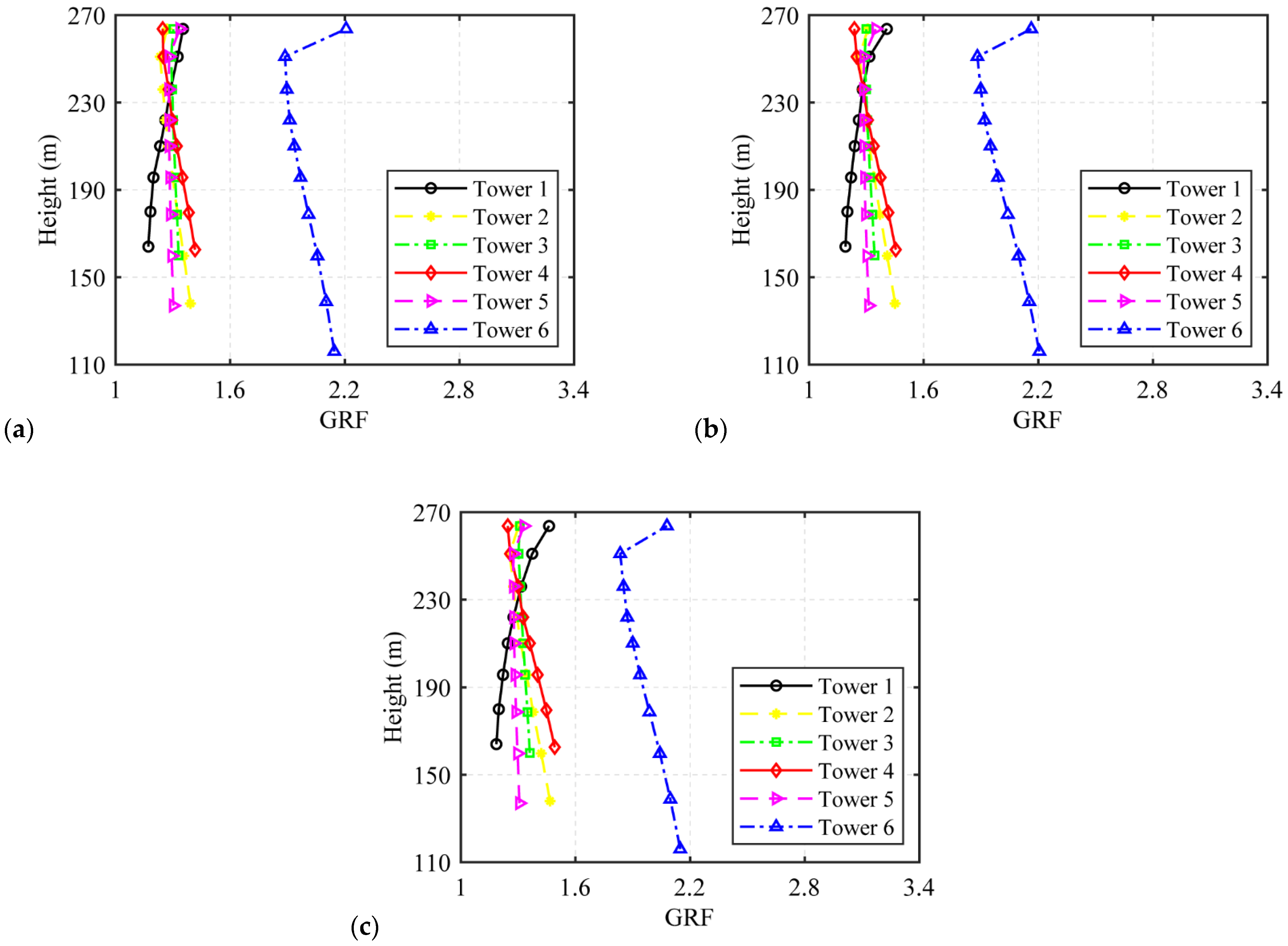
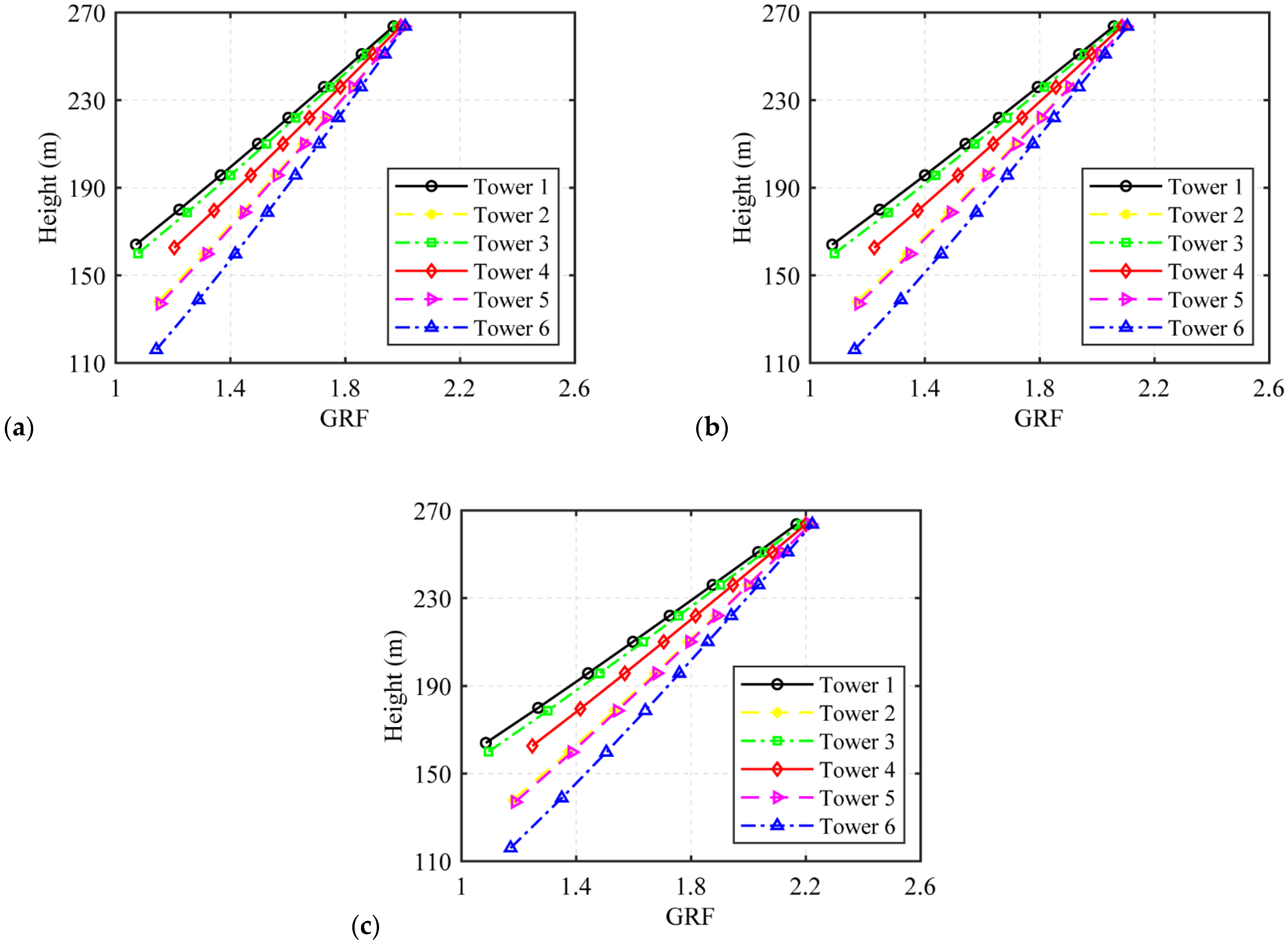
5.1. Influence of Wind Speed
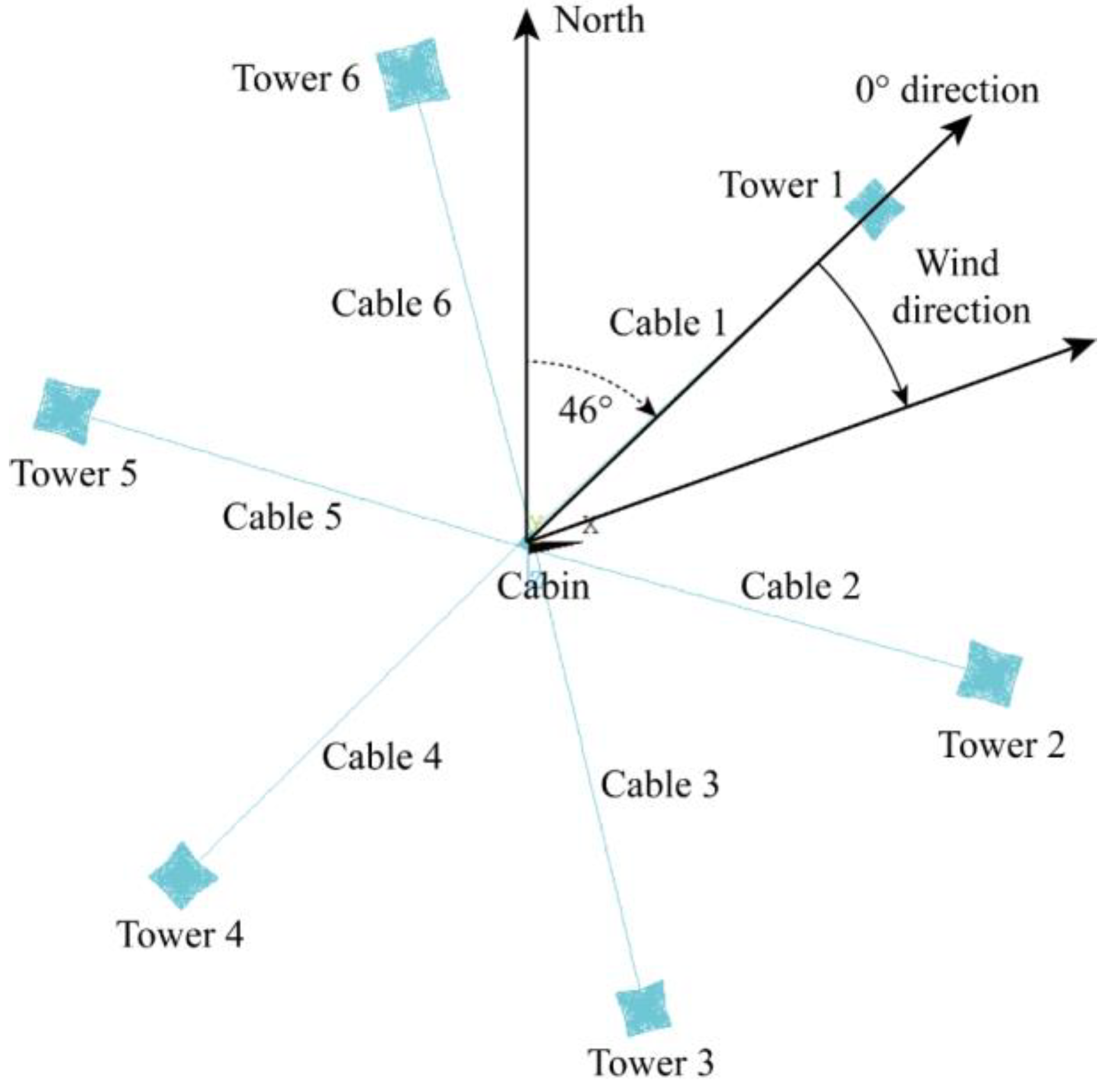
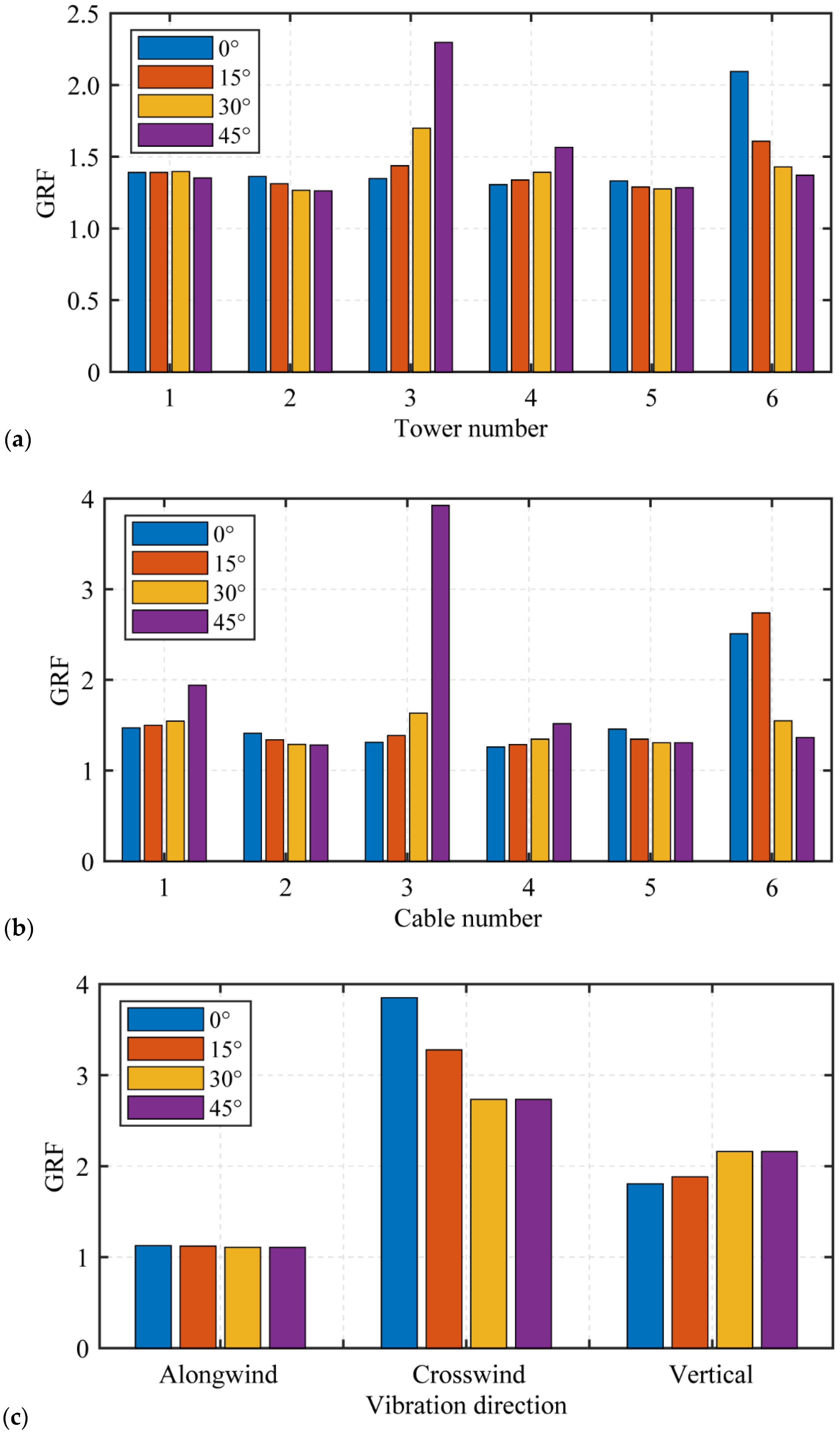
5.2. Influence of Wind Direction
6. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, W.X.; Sang, R.H.; Yang, L.; Lei, H. Optimizing the anchoring structure for a super large cable-net structure with improved fatigue resistance. Adv. Struct. Eng. 2020, 23, 657–669. [Google Scholar] [CrossRef]
- Lemonick, S. Arecibo telescope will be dismantled. Chem. Eng. News 2020, 98, 8. [Google Scholar] [CrossRef]
- Yao, R.; Fu, C.H.; Sun, C.H.; Zhu, W.B. Accuracy design of the stewart manipulator of the Five-hundred-meter Aperture Spherical radio Telescope. Adv. Mech. Eng. 2019, 11, 1687814019840840. [Google Scholar] [CrossRef]
- Yu, L.M.; Hock, F.T.E.; Suo, S.F.; Ren, G.X. Experimental research of first feed-support system of fast. Exp. Astron. 2003, 15, 113–122. [Google Scholar] [CrossRef]
- Xiao, Z.Z.; Liu, H.L.; Li, Z.L.; Yu, D.K.; Li, Y.G. Research on wind-induced reliability of double column suspended guyed tower in strong wind area. Int. J. Struct. Stab. Dyn. 2016, 16, 1640011. [Google Scholar] [CrossRef]
- Ma, T.T.; Zhao, L.; Ji, T.F.; Tang, T. Case study of wind-induced performance and equivalent static wind loads of large-span openable truss structures. Thin-Walled Struct. 2022, 175, 109206. [Google Scholar] [CrossRef]
- Tian, L.; Pan, H.Y.; Ma, R.S.; Zhang, L.J.; Liu, Z.W. Full-scale test and numerical failure analysis of a latticed steel tubular transmission tower. Eng. Struct. 2020, 208, 109919. [Google Scholar] [CrossRef]
- Zheng, H.D.; Fan, J. Progressive collapse analysis of a truss transmission tower-line system subjected to downburst loading. J. Constr. Steel Res. 2022, 188, 107044. [Google Scholar] [CrossRef]
- Liang, S.G.; Zou, L.H.; Wang, D.H.; Cao, H. Investigation on wind tunnel tests of a full aeroelastic model of electrical transmission tower-line system. Eng. Struct. 2015, 85, 63–72. [Google Scholar] [CrossRef]
- Zhang, Q.; Fu, X.; Ren, L.; Jia, Z.G. Modal parameters of a transmission tower considering the coupling effects between the tower and lines. Eng. Struct. 2020, 220, 110947. [Google Scholar] [CrossRef]
- Kasperski, M. Extreme wind load distributions for linear and nonlinear design. Eng. Struct. 1992, 14, 27–34. [Google Scholar] [CrossRef]
- Chen, X.Z.; Kareem, A. Equivalent static wind loads on buildings: New model. J. Struct. Eng. 2004, 130, 1425–1435. [Google Scholar] [CrossRef]
- Davenport, A.G. Gust response factors for transmission line loading. In Proceedings of the Fifth International Conference on Wind Engineering, Fort Collins, CO, USA, 8–13 July 1979; Pergamon: Tarrytown, NY, USA, 1980. [Google Scholar]
- Deng, H.Z.; Si, R.J.; Hu, X.Y.; Duan, C.Y. Wind tunnel study on wind-induced vibration responses of a UHV transmission tower-line system. Adv. Struct. Eng. 2013, 16, 1175–1185. [Google Scholar] [CrossRef]
- Jiang, P.; Yue, Y.L.; Gan, H.Q.; Yao, R.; Li, H.; Pan, G.F.; Sun, J.H.; Yu, D.J.; Liu, H.F.; Tang, N.Y.; et al. Commissioning progress of the FAST. Sci. China-Phys. Mech. Astron. 2019, 62, 959502. [Google Scholar] [CrossRef]
- Jiang, P.; Li, Q.W.; Nan, R.D. Research on design of adaptive connecting mechanisms for the cable-net and panels of FAST. Res. Astron. Astrophys. 2017, 17, 099. [Google Scholar] [CrossRef]
- Irvine, M. Cable Structures; The MIT Press: Cambridge, MA, USA, 1981. [Google Scholar]
- Li, H.N.; Zhang, H.Z.; Li, Q.W.; Fu, X. Research on the aerodynamic characteristics of FAST feed cabin structure and the wind-induced responses of the coupled system. Eng. Mech. 2023. Available online: https://kns.cnki.net/kcms/detail/11.2595.2503.20230423.20231715.20230002.html (accessed on 24 April 2023).
- GB 50009-2012; Load Code for the Design of Building Structures. China Architecture & Building Press: Beijing, China, 2012.
- Solari, G.; Tubino, F. A turbulence model based on principal components. Probab. Eng. Mech. 2002, 17, 327–335. [Google Scholar] [CrossRef]
- Solari, G.; Piccardo, G. Probabilistic 3-D turbulence modeling for gust buffeting of structures. Probab. Eng. Mech. 2001, 16, 73–86. [Google Scholar] [CrossRef]
- Shiotani, M.; Arai, H. Lateral Structures of Gusts in High Winds. In Proceedings of the International Research Seminar on Wind Effects on Buildings and Structures, Ottawa, ON, Canada, 11–15 September 1967; University of Toronto Press: Ottawa, ON, Canada, 1967. [Google Scholar]
- Deodatis, G. Simulation of ergodic multivariate stochastic processes. J. Eng. Mech. 1996, 122, 778–787. [Google Scholar] [CrossRef]
- Wang, D.H.; Chen, X.Z.; Xu, K. Analysis of buffeting response of hinged overhead transmission conductor to nonstationary winds. Eng. Struct. 2017, 147, 567–582. [Google Scholar] [CrossRef]
- Shehata, A.; El Damatty, A. Extensible catenary approach in analyzing transmission line’s conductors under downbursts. Eng. Struct. 2021, 234, 111905. [Google Scholar] [CrossRef]
- Lou, W.J.; Wu, D.G.; Xu, H.W. Wind-induced conductor response considering the nonproportionality of generalized aerodynamic damping. J. Mech. Sci. Technol. 2019, 33, 3075–3084. [Google Scholar] [CrossRef]
- Davenport, A.G.; Sparling, B.F. Dynamic gust response factors for guyed towers. J. Wind Eng. Ind. Aerodyn. 1992, 43, 2237–2248. [Google Scholar] [CrossRef]
- Davenport, A.G. Note on the distribution of the largest value of a random function with applications to gust loading. Proc. Inst. Civ. Eng. 1964, 28, 187–196. [Google Scholar] [CrossRef]
- DL/T 5551-2018; Load Code for the Design of Overhead Transmission Line. China Planning Press: Beijing, China, 2018.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material of Feed Cabin | Material of Main Members | Material of Secondary Members | Structural Type of Cables | Diameter of Cables | Tensile Strength of Cables |
|---|---|---|---|---|---|
| Q345 steel | Q345 steel | Q235 steel | Steel wire rope | 46 mm | 1960 MPa |
| Vibration Direction | Along Wind | Crosswind | Vertical |
|---|---|---|---|
| GRF | 1.1220 | 3.2777 | 1.8828 |
| Cable Number | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| GRF | 1.4697 | 1.4092 | 1.3107 | 1.2590 | 1.4555 | 2.5090 |
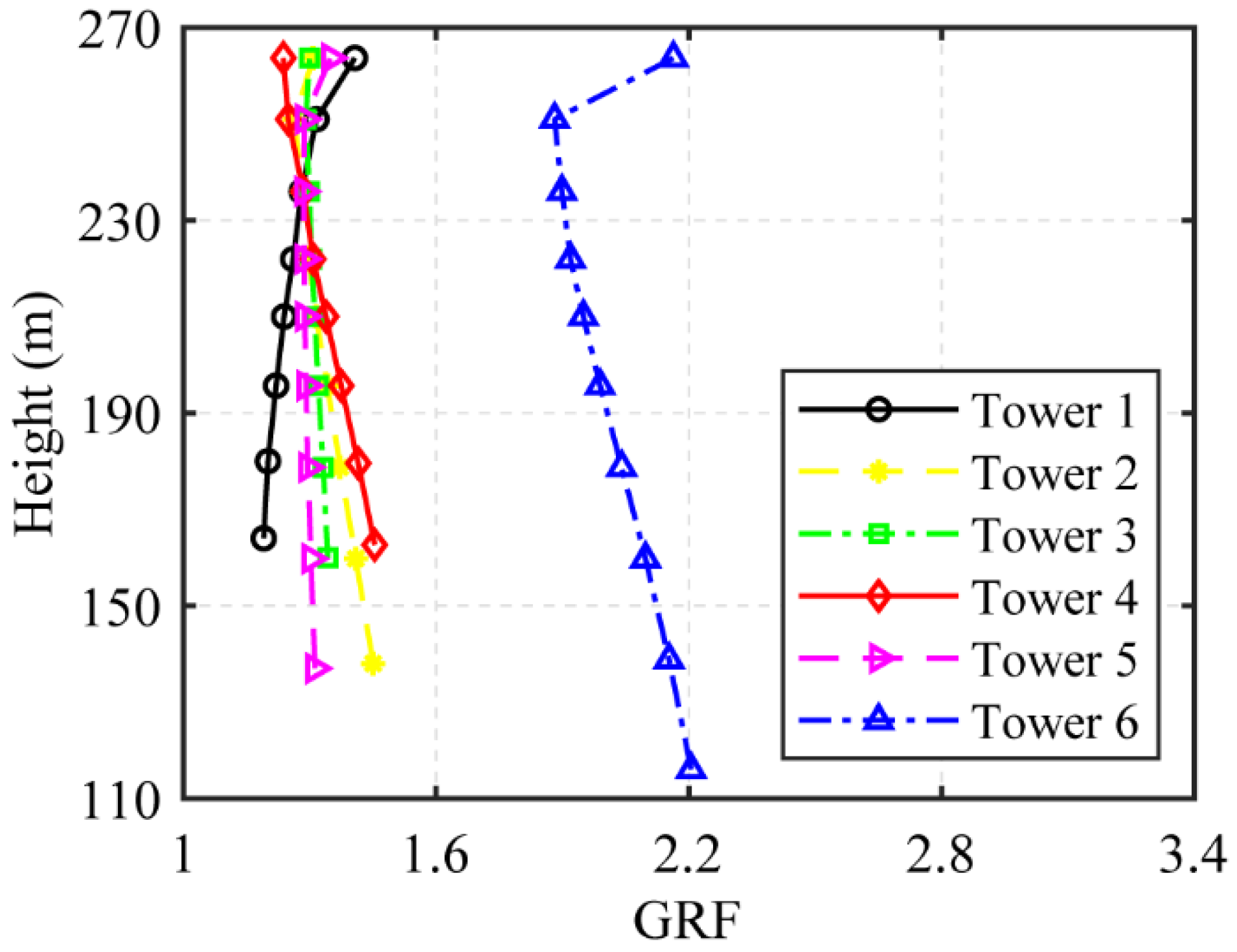
| Tower Number | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| GRF | 1.3911 | 1.3633 | 1.3488 | 1.3061 | 1.3322 | 2.0951 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, D.-X.; Li, H.-N.; Li, Q.-W. Wind-Induced Vibrations and Gust Response Factors of the Cabin–Cable–Tower System. Symmetry 2023, 15, 1965. https://doi.org/10.3390/sym15111965
Mo D-X, Li H-N, Li Q-W. Wind-Induced Vibrations and Gust Response Factors of the Cabin–Cable–Tower System. Symmetry. 2023; 15(11):1965. https://doi.org/10.3390/sym15111965
Chicago/Turabian StyleMo, De-Xiu, Hong-Nan Li, and Qing-Wei Li. 2023. "Wind-Induced Vibrations and Gust Response Factors of the Cabin–Cable–Tower System" Symmetry 15, no. 11: 1965. https://doi.org/10.3390/sym15111965
APA StyleMo, D.-X., Li, H.-N., & Li, Q.-W. (2023). Wind-Induced Vibrations and Gust Response Factors of the Cabin–Cable–Tower System. Symmetry, 15(11), 1965. https://doi.org/10.3390/sym15111965