



Nonlinear Dynamic Modeling and Analysis for a Spur Gear System with Dynamic Meshing Parameters and Sliding Friction

Abstract
:1. Introduction
- We establish a new sliding friction model between the tooth surfaces considering the influence of the transverse vibration.
- Based on the sliding friction model, a new nonlinear dynamic model with dynamic meshing parameters and sliding friction is proposed.
- The effects of the input speed and friction coefficient on the dynamic response of the new model and the previous model are compared and analyzed.
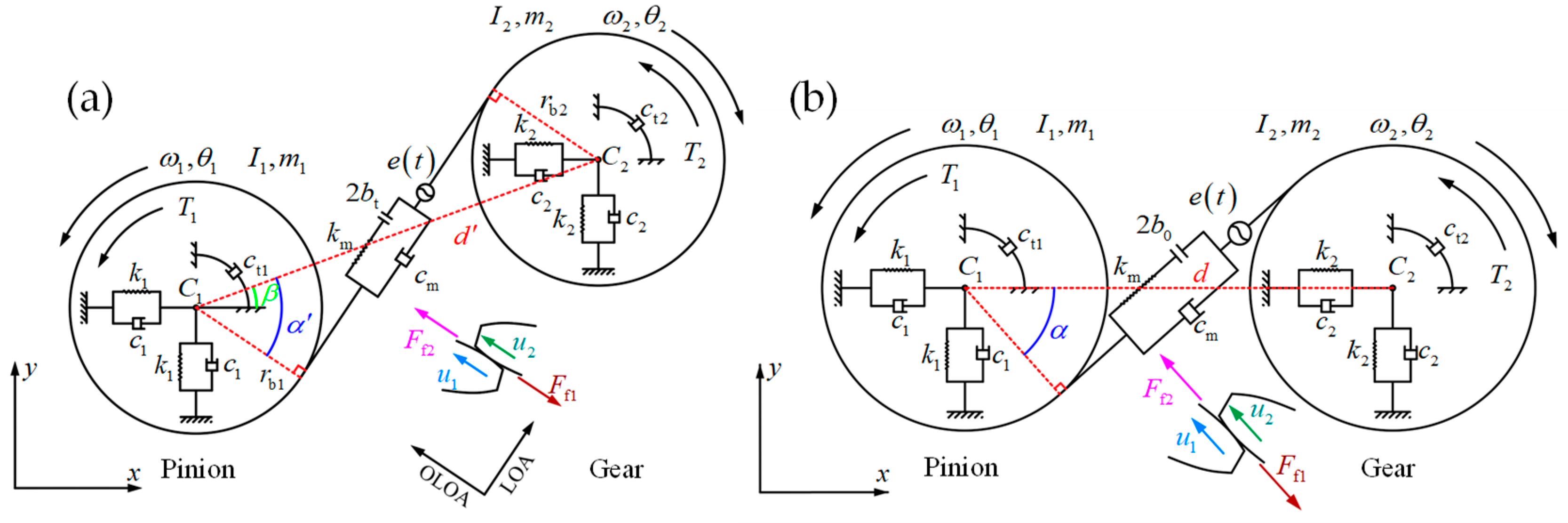
2. Dynamic Model for Spur Gear System
2.1. Dynamic Meshing Parameters under the Influence of Transverse Vibration
2.2. DMF and Sliding Friction Force/Torque under the Influence of Transverse Vibration
3. Derivation of Equations of Motion
4. Comparison and Discussion of Dynamic Response
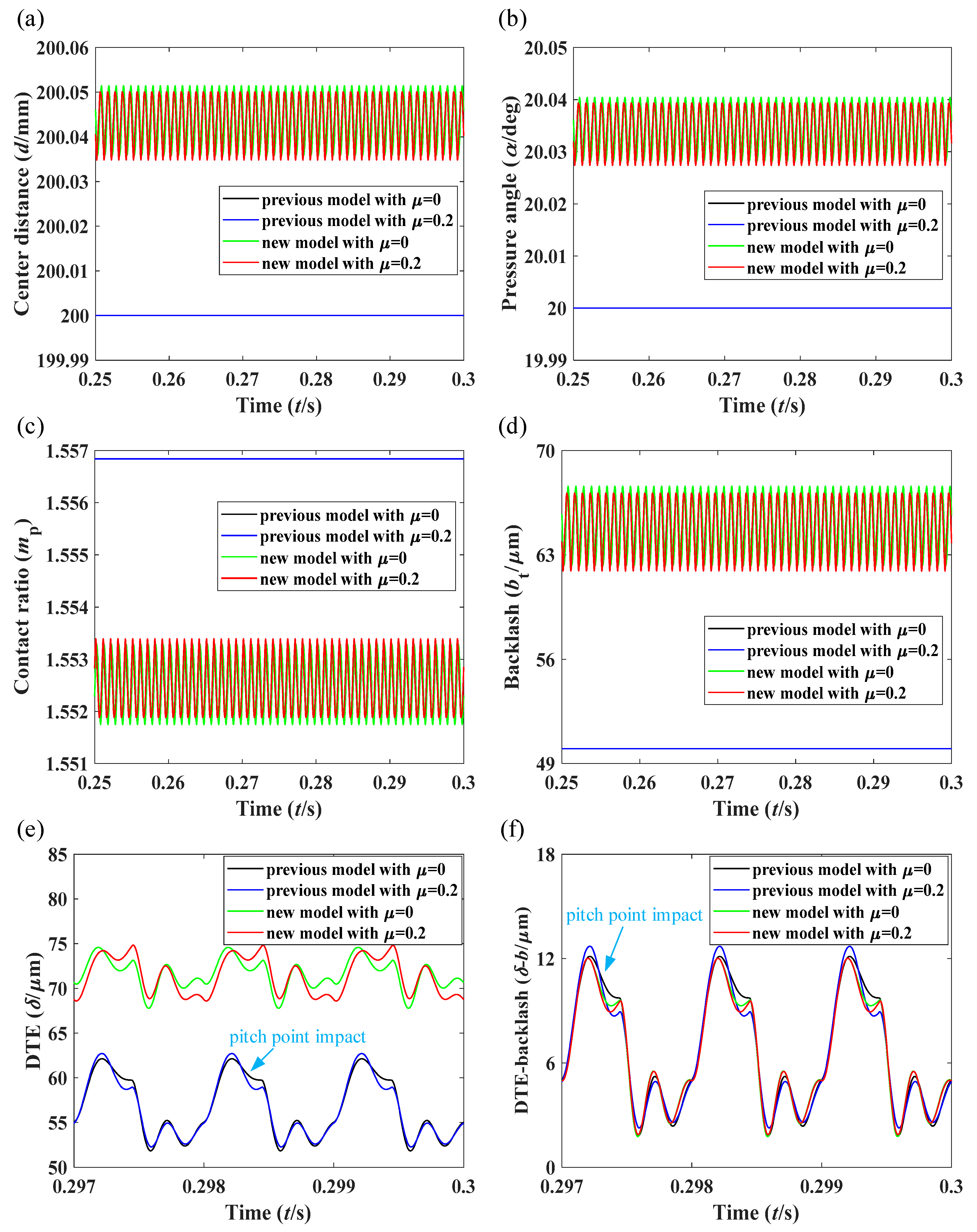
4.1. System Parameters and Model Validation
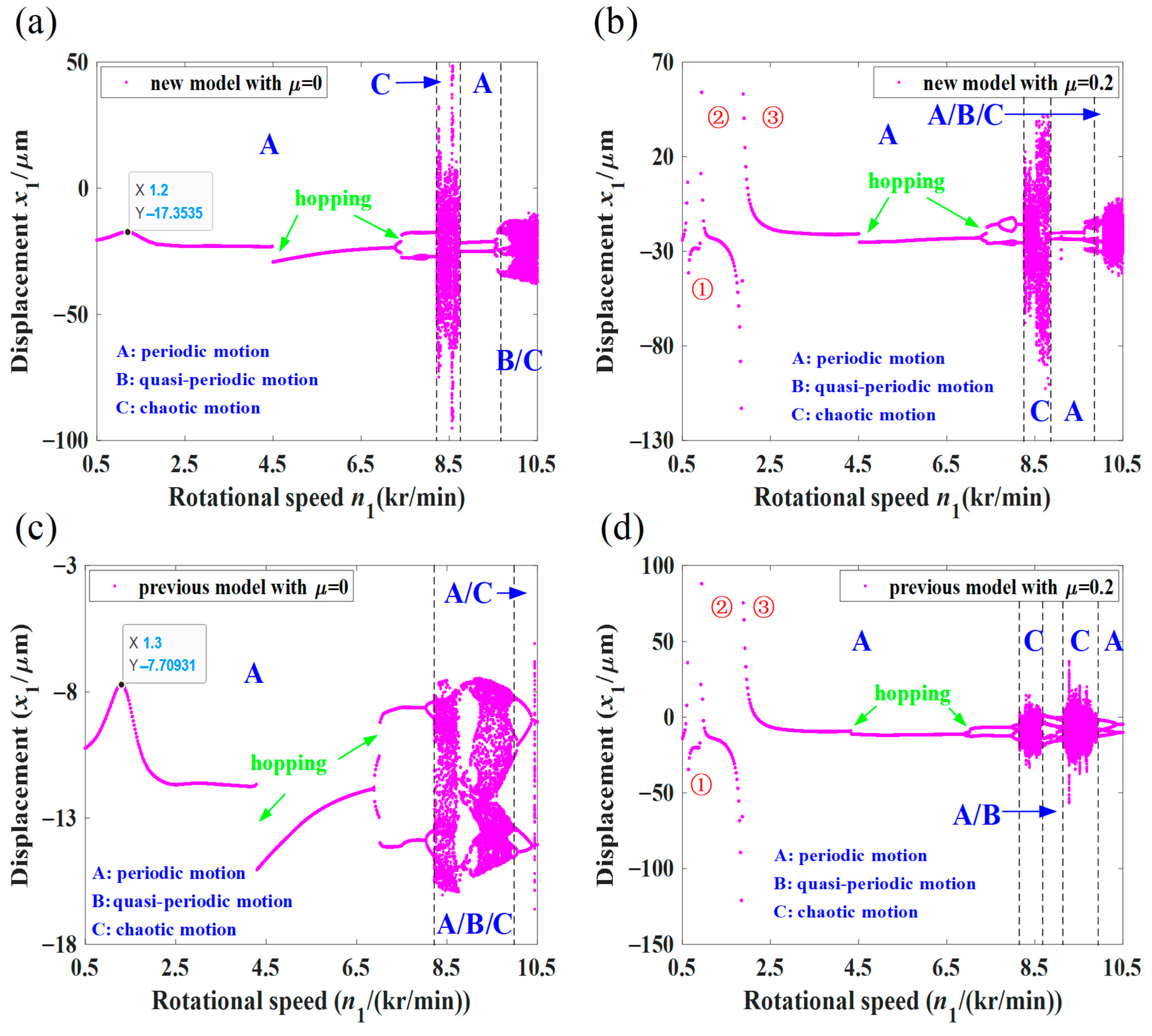
4.2. Effect of the Input Speed on System Dynamic Response
4.2.1. Chaotic Response of the System with and
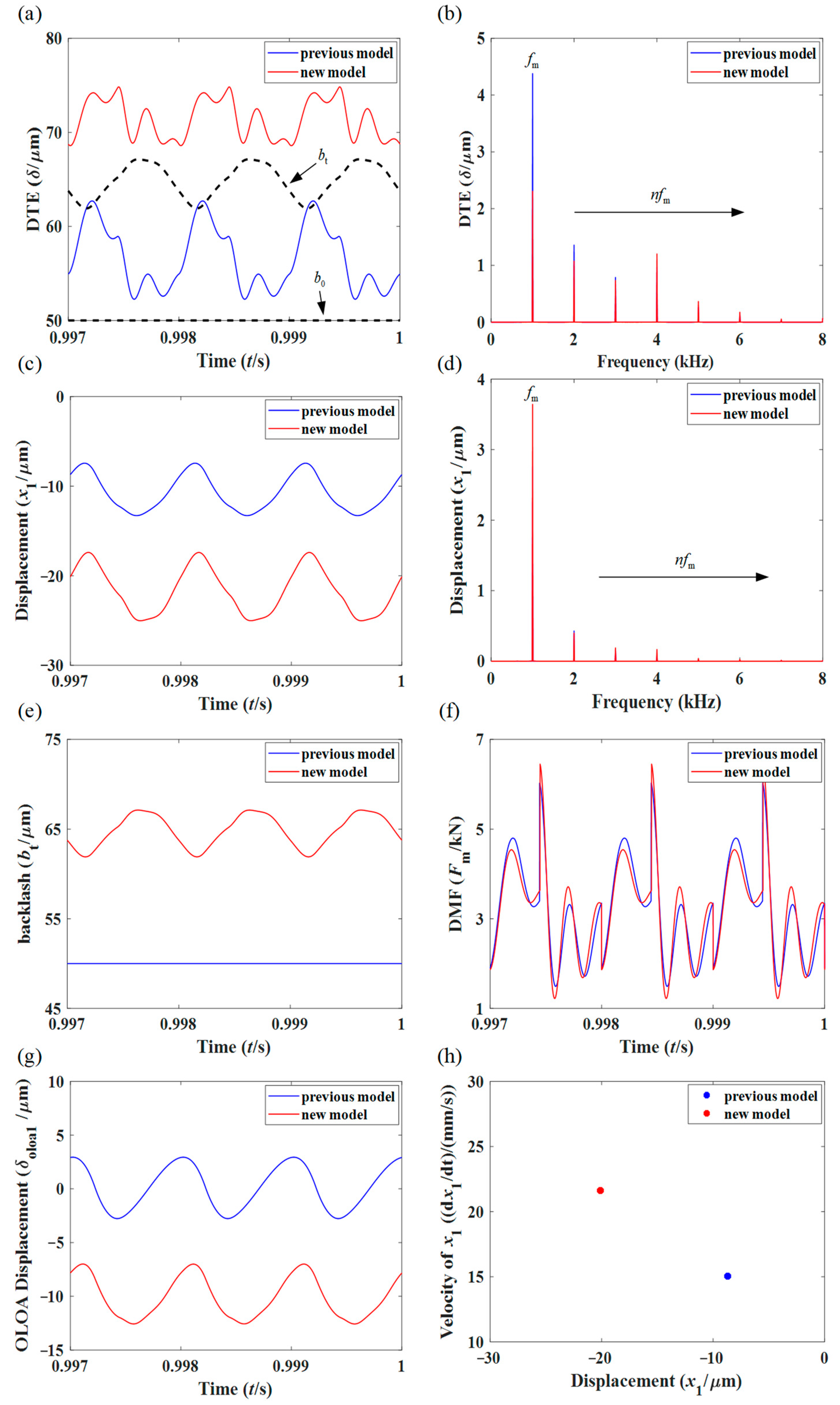
4.2.2. Comparison of Dynamic Responses at Different Input Speed with
4.3. Effect of the Friction Coefficient on System Dynamic Response
4.3.1. Chaotic Response of the System at and
4.3.2. Comparison of Dynamic Responses under Different Friction Coefficients at
4.3.3. Comparison of Dynamic Responses under Different Friction Coefficients at
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Ye, H.; Yang, L.; Tian, A. On the Existence of Self-Excited Vibration in Thin Spur Gears: A Theoretical Model for the Estimation of Damping by the Energy Method. Symmetry 2018, 10, 664. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.G.; Shao, Y.M.; Lim, T.C. Non-Linear Dynamic Simulation of Gear Response under the Idling Condition. Int. J. Automot. Technol. 2012, 13, 541–552. [Google Scholar] [CrossRef]
- Yin, M. Study on Dynamics of Herringbone Gear-Rotor-Journal Bearing System with Lubrication Effects. Ph.D. Thesis, Northwestern Polytechnical University, Xi’an, China, 2017. [Google Scholar]
- Kahraman, A.; Singh, R. Non-Linear Dynamics of a Geared Rotor-Bearing System with Multiple Clearances. J. Sound Vib. 1991, 144, 469–506. [Google Scholar] [CrossRef]
- Li, S.; Kahraman, A. A Tribo-Dynamic Model of a Spur Gear Pair. J. Sound Vib. 2013, 332, 4963–4978. [Google Scholar] [CrossRef]
- Zhao, B.; Huangfu, Y.; Ma, H.; Zhao, Z.; Wang, K. The Influence of the Geometric Eccentricity on the Dynamic Behaviors of Helical Gear Systems. Eng. Fail. Anal. 2020, 118, 104907. [Google Scholar] [CrossRef]
- Cao, Z.; Chen, Z.; Jiang, H. Nonlinear Dynamics of a Spur Gear Pair with Force-Dependent Mesh Stiffness. Nonlinear Dyn. 2020, 99, 1227–1241. [Google Scholar] [CrossRef]
- Geng, Z.; Li, J.; Xiao, K.; Wang, J. Analysis on the Vibration Reduction for a New Rigid–Flexible Gear Transmission System. J. Vib. Control 2022, 28, 2212–2225. [Google Scholar] [CrossRef]
- Kong, X.; Hu, Z.; Tang, J.; Chen, S.; Wang, Z. Effects of Gear Flexibility on the Dynamic Characteristics of Spur and Helical Gear System. Mech. Syst. Signal Process. 2023, 184, 109691. [Google Scholar] [CrossRef]
- Siyu, C.; Jinyuan, T.; Caiwang, L.; Qibo, W. Nonlinear Dynamic Characteristics of Geared Rotor Bearing Systems with Dynamic Backlash and Friction. Mech. Mach. Theory 2011, 46, 466–478. [Google Scholar] [CrossRef]
- Kim, W.; Yoo, H.H.; Chung, J. Dynamic Analysis for a Pair of Spur Gears with Translational Motion Due to Bearing Deformation. J. Sound Vib. 2010, 329, 4409–4421. [Google Scholar] [CrossRef]
- Kim, W.; Lee, J.Y.; Chung, J. Dynamic Analysis for a Planetary Gear with Time-Varying Pressure Angles and Contact Ratios. J. Sound Vib. 2012, 331, 883–901. [Google Scholar] [CrossRef]
- Chen, Y.-C. Time-Varying Dynamic Analysis for a Helical Gear Pair System with Three-Dimensional Motion Due to Bearing Deformation. Adv. Mech. Eng. 2020, 12, 168781402091812. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, C.; Xiang, C.L.; Wang, C. Tooth Profile Modification Based on Lateral-Torsional-Rocking Coupled Nonlinear Dynamic Model of Gear System. Mech. Mach. Theory 2016, 105, 606–619. [Google Scholar] [CrossRef]
- Yi, Y.; Huang, K.; Xiong, Y.; Sang, M. Nonlinear Dynamic Modelling and Analysis for a Spur Gear System with Time-Varying Pressure Angle and Gear Backlash. Mech. Syst. Signal Process. 2019, 132, 18–34. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, R. Theoretical Investigation of the Improved Nonlinear Dynamic Model for Star Gearing System in GTF Gearbox Based on Dynamic Meshing Parameters. Mech. Mach. Theory 2021, 156, 104108. [Google Scholar] [CrossRef]
- Jedliński, Ł. Influence of the Movement of Involute Profile Gears along the Off-Line of Action on the Gear Tooth Position along the Line of Action Direction. Eksploat. Niezawodn.–Maint. Reliab. 2021, 23, 736–744. [Google Scholar] [CrossRef]
- Yang, H.; Shi, W.; Chen, Z.; Guo, N. An Improved Analytical Method for Mesh Stiffness Calculation of Helical Gear Pair Considering Time-Varying Backlash. Mech. Syst. Signal Process. 2022, 170, 108882. [Google Scholar] [CrossRef]
- Tian, G.; Gao, Z.; Liu, P.; Bian, Y. Dynamic Modeling and Stability Analysis for a Spur Gear System Considering Gear Backlash and Bearing Clearance. Machines 2022, 10, 439. [Google Scholar] [CrossRef]
- He, S. Effect of Sliding Friction on Spur and Helical Gear Dynamics and Vibro-Acoustics. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2008. [Google Scholar]
- Vaishya, M.; Singh, R. Analysis of periodically varying gear mesh systems with coulomb friction using floquet theory. J. Sound Vib. 2001, 243, 525–545. [Google Scholar] [CrossRef] [Green Version]
- Vaishya, M.; Singh, R. Sliding friction-induced non-linearity and parametric effects in gear dynamics. J. Sound Vib. 2001, 248, 671–694. [Google Scholar] [CrossRef] [Green Version]
- Gunda, R.; Singh, R. Dynamic Analysis of Sliding Friction in a Gear Pair. In Proceedings of the 9th International Power Transmission and Gearing Conference, Parts A and B, ASMEDC, Chicago, IL, USA, 1 January 2003; Volume 4, pp. 441–448. [Google Scholar]
- He, S.; Gunda, R.; Singh, R. Effect of Sliding Friction on the Dynamics of Spur Gear Pair with Realistic Time-Varying Stiffness. J. Sound Vib. 2007, 301, 927–949. [Google Scholar] [CrossRef]
- He, S.; Rook, T.; Singh, R. Construction of Semianalytical Solutions to Spur Gear Dynamics Given Periodic Mesh Stiffness and Sliding Friction Functions. J. Mech. Des. 2008, 130, 122601. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, S.S.; Chakraborty, G. Parametric Instability of a Multi-Degree-of-Freedom Spur Gear System with Friction. J. Sound Vib. 2015, 354, 236–253. [Google Scholar] [CrossRef]
- Zhou, S.; Song, G.; Sun, M.; Ren, Z. Nonlinear Dynamic Response Analysis on Gear-Rotor-Bearing Transmission System. J. Vib. Control 2018, 24, 1632–1651. [Google Scholar] [CrossRef]
- Shi, J.; Gou, X.; Zhu, L. Modeling and Analysis of a Spur Gear Pair Considering Multi-State Mesh with Time-Varying Parameters and Backlash. Mech. Mach. Theory 2019, 134, 582–603. [Google Scholar] [CrossRef]
- Shi, J.; Gou, X.; Jin, W.; Feng, R. Multi-Meshing-State and Disengaging-Proportion Analyses of a Gear-Bearing System Considering Deterministic-Random Excitation Based on Nonlinear Dynamics. J. Sound Vib. 2023, 544, 117360. [Google Scholar] [CrossRef]
- Wang, C. Dynamic Model of a Helical Gear Pair Considering Tooth Surface Friction. J. Vib. Control 2020, 26, 1356–1366. [Google Scholar] [CrossRef]
- Hu, B.; Zhou, C.; Wang, H.; Chen, S. Nonlinear Tribo-Dynamic Model and Experimental Verification of a Spur Gear Drive under Loss-of-Lubrication Condition. Mech. Syst. Signal Process. 2021, 153, 107509. [Google Scholar] [CrossRef]
- Luo, W.; Qiao, B.; Shen, Z.; Yang, Z.; Cao, H.; Chen, X. Investigation on the Influence of Spalling Defects on the Dynamic Performance of Planetary Gear Sets with Sliding Friction. Tribol. Int. 2021, 154, 106639. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, F. Dynamic Characteristics of Helical Gears Incorporating the Effects of Coupled Sliding Friction. Meccanica 2022, 57, 523–539. [Google Scholar] [CrossRef]
- Ma, H.; Song, R.; Pang, X.; Wen, B. Time-Varying Mesh Stiffness Calculation of Cracked Spur Gears. Eng. Fail. Anal. 2014, 44, 179–194. [Google Scholar] [CrossRef]
- Kahraman, A.; Singh, R. Non-Linear Dynamics of a Spur Gear Pair. J. Sound Vib. 1990, 142, 49–75. [Google Scholar] [CrossRef]
- Pedrero, J.I.; Pleguezuelos, M.; Artés, M.; Antona, J.A. Load Distribution Model along the Line of Contact for Involute External Gears. Mech. Mach. Theory 2010, 45, 780–794. [Google Scholar] [CrossRef]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Wen, S.; Huang, P. Principles of Tribology, 2nd ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017; ISBN 978-1-119-21490-8. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Module/(mm) | 10 | |
| Number of teeth | 20/20 | |
| Pressure angle of reference circle/(deg) | 20 | |
| Addendum coefficient | 1 | |
| Tip clearance coefficient | 0.25 | |
| Face width/(mm) | 30 | |
| Gear mass/(kg) | 6.57/6.57 | |
| Moment of inertia/(kg·m2) | 0.0365/0.0365 | |
| Designed contact ratio | 1.5568 | |
| Equivalent shaft-bearing stiffness/(N/m) | 1 × 108 | |
| Equivalent shaft-bearing damping/(N·s/m) | 512.64/512.64 | |
| Torsional damping/(N·s/m) | 143.29/143.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Zhang, D.; Liu, K.; Wang, J.; Liu, Y.; Long, Y. Nonlinear Dynamic Modeling and Analysis for a Spur Gear System with Dynamic Meshing Parameters and Sliding Friction. Symmetry 2023, 15, 1530. https://doi.org/10.3390/sym15081530
Liu H, Zhang D, Liu K, Wang J, Liu Y, Long Y. Nonlinear Dynamic Modeling and Analysis for a Spur Gear System with Dynamic Meshing Parameters and Sliding Friction. Symmetry. 2023; 15(8):1530. https://doi.org/10.3390/sym15081530
Chicago/Turabian StyleLiu, Hao, Dayi Zhang, Kaicheng Liu, Jianjun Wang, Yu Liu, and Yifu Long. 2023. "Nonlinear Dynamic Modeling and Analysis for a Spur Gear System with Dynamic Meshing Parameters and Sliding Friction" Symmetry 15, no. 8: 1530. https://doi.org/10.3390/sym15081530
APA StyleLiu, H., Zhang, D., Liu, K., Wang, J., Liu, Y., & Long, Y. (2023). Nonlinear Dynamic Modeling and Analysis for a Spur Gear System with Dynamic Meshing Parameters and Sliding Friction. Symmetry, 15(8), 1530. https://doi.org/10.3390/sym15081530