
The Problem of Moments: A Bunch of Classical Results with Some Novelties †

1
Department of Economics & Management, University of Trento, 38100 Trento, Italy
2
Institute of Mathematics & Informatics, Bulgarian Academy of Sciences, 1113 Sofia, Bulgaria
3
Faculty of Mathematical Sciences, Shandong University, Jinan 250100, China
*
Author to whom correspondence should be addressed.
†
Dedicated to Professor Christian Berg on the occasion of his 79
Symmetry 2023, 15(9), 1743; https://doi.org/10.3390/sym15091743
Submission received: 10 August 2023
/
Revised: 1 September 2023
/
Accepted: 1 September 2023
/
Published: 11 September 2023
(This article belongs to the Special Issue Symmetry/Asymmetry: Feature Review Papers)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:We summarize significant classical results on (in)determinacy of measures in terms of their finite positive integer order moments. Well known is the role of the smallest eigenvalues of Hankel matrices, starting from Hamburger’s results a century ago and ending with the great progress made only in recent times by C. Berg and collaborators. We describe here known results containing necessary and sufficient conditions for moment (in)determinacy in both Hamburger and Stieltjes moment problems. In our exposition, we follow an approach different from that commonly used. There are novelties well complementing the existing theory. Among them are: (a) to emphasize on the geometric interpretation of the indeterminacy conditions; (b) to exploit fine properties of the eigenvalues of perturbed symmetric matrices allowing to derive new lower bounds for the smallest eigenvalues of Hankel matrices (these bounds are used for concluding indeterminacy); (c) to provide new arguments to confirm classical results; (d) to give new numerical illustrations involving commonly used probability distributions.
Keywords:
positive measure; moments; Hamburger moment problem; Stieltjes moment problem; determinacy; indeterminacy; Hankel matrices; smallest eigenvalues; limit parabolic region; perturbed symmetric matricesMSC:
44A60; 60E05; 62E101. Introduction: Preliminaries
In order to make the paper self-contained and easy to follow, we first provide the basics. Within the classical moment problem, or the problem of moments, we deal with two main questions, whose answers are known and available in the literature.
1.1. Basic Terminology: Main Questions
Question 1. (existence). Is there a bounded positive measure with a specified support such that a given infinite sequence of real numbers is the moment sequence of , i.e., for all
We assume, of course, that for all is the the kth order moment of The answer to Question 1 is well known; it is given by the positive definite property of Hankel matrices, equivalently, the positivity of their determinants; details are given below.
Question 2. (uniqueness). Is the only measure with the moments ?
If the answer to Question 2 is ‘yes’, we say that is moment determinate, or, that is uniquely determined by its moments. Otherwise, if the answer is ‘no’, is moment indeterminate, or, is not determined uniquely by its moments. In such a case, available is the following deep and nontrivial result, see Berg-Christensen [1].
General result. Suppose that μ is a measure with finite all moments of positive integer order. If μ is nonunique, then there are infinitely many measures of any kind, discrete, absolutely continuous, or singular, all with the same moments as
There is a long, rich, and amazingly interesting history which originates in works by P.L. Chebyshev (1832–1894) and A.A. Markov (1856–1922) [2]. The systematic development of the moment problem is due to T.J. Stieltjes (1856–1894), see his memoir Stieltjes [3,4]. In this remarkable work, he was the first to show that the answer to Question 2 can be ‘no’ by describing explicitly different measures on sharing the same moments.
The answers to the above questions depend on both the support of and the moment sequence . Adopted in the literature are the following names: Hausdorff moment problem, if is bounded, Stieltjes moment problem, if is unbounded and , and Hamburger moment problem, if is unbounded and .
If , we say that is a Hamburger moment sequence, while for , is a Stieltjes moment sequence. We do not deal with the Hausdorff moment problem for an obvious reason: any such measure, when it exists, is uniquely determined by its moments.
Widely known references are the books by Shohat-Tamarkin [5], Akhiezer [6], Berg-Christinsen-Ressel [7] and Schmüdgen [8]; see also Simon [9], Sodin [10] and Olteanu [11]. These sources contain comprehensive details about a series of remarkable results paving the progress in moment problems for more than a century.
In this paper, we use standard terminology and notations generally accepted in analysis in works on moment problems. It is telling that is a moment sequence always means that there is a measure ‘behind’, i.e., there exists which produces these moments.
We need a few words for terminology clarity: if we are given a measure with finite moments, then produces its only one moment sequence . It is the measure which is either determinate or indeterminate; hence, there are no reasons to stick ‘determinate’ or ‘indeterminate’ to the moment sequence.
We are interested in the (in)determinacy property of a measure with unbounded support and finite all moments . Note that, in general, a Stieltjes moment sequence can also be considered as a Hamburger moment sequence. One important, not intuitive and nontrivial fact is the possibility for a measure with finite moments to be determinate in Stieltjes sense and indeterminate in Hamburger sense. We refer, e.g., to Shohat-Tamarkin [5], p. 75, Berg-Valent [12], p. 165, Schmüdgen [8], p. 183; see also Theorem 7 given below in Section 3.
1.2. Hankel Matrices and Their Smallest Eigenvalues
For any moment sequence we define a few infinite sequences of Hankel matrices, namely, , called a ‘basic’ Hankel matrix, and , called a ‘p-shifted’ Hankel matrix. Recall that and are matrices defined as follows:
The basic Hankel matrix is based on all moments while for the ‘shifted’ Hankel matrices, are formed as follows: is based on the ‘shifted’ moment sequence which is generated by the measure with ; is based on the ‘shifted’ moment sequence generated by the measure with ; similarly for and . For the determinants of Hankel matrices, we use the following notations:
In this paper, we use to denote positive constants which depend on some fixed moments, but we omit them as explicit arguments. For simplicity, if the moments are fixed and we allow , the moment preceding , to ‘vary’, then instead of the full notations and , we write and
Recall a fact from Shohat-Tamarkin [5], Theorems 1.2–1.3, which is related to our Question 1: we have that is the moment sequence of a measure with support on (Hamburger case) if and only if for all . If the support of is (Stieltjes case), we have the same statement but now, if and only if and for all Such a sequence is positive definite. Since , as well , are positive, then all eigenvalues of the Hankel matrices and are positive. We use the notation for the kth largest eigenvalue of . Thus:
It is well known, see, e.g., Berg-Chen-Ismail [13], that the smallest eigenvalue of the matrix is given by the Rayleigh relation:
and that the positive numerical sequence is decreasing as .
The smallest eigenvalues of Hankel matrices are fundamentally involved when studying (in)determinacy of measures; see the historical paper by Hamburger [14,15,16] and the more recent works by Chen-Lawrence [17], Berg-Chen-Ismail [13], Berg-Szwarc [18] and Chen-Sikorowski-Zhu [19].
In the case of indeterminacy, the inverse Hankel matrices are involved. Indeed, Berg-Chen-Ismail [13] obtained the lower bound for the smallest eigenvalue in terms of the trace of the inverse matrix (see their Equations (1.10), (1.11) and (1.12)), starting from the fact that of a Hankel matrix is equal to of the inverse of that Hankel matrix.
1.3. Two Classical Results
For a very long time, the only information available in the literature were classical results expressed in terms of the smallest eigenvalues of Hankel matrices; see, e.g., Hamburger [14,15,16]. A remarkable progress was made only in more recent times by Berg-Thill [20] and Berg-Chen-Ismail [13]. These authors proved fundamental results, which can be summarized as follows (the letter ‘H’ stands for Hamburger, ‘S’ stands for Stieltjes):
Classical Result H. In the Hamburger moment problem, the measure μ is uniquely determined by its moments
if and only if the sequence of the smallest eigenvalues of the basic Hankel matrices converges to zero as
Equivalently, μ is indeterminate by its moments
if and only if the sequence of the smallest eigenvalues of the basic Hankel matrices converges to a strictly positive number as
Classical Result S. In the Stieltjes moment problem, the measure μ is nonuniquely determined by its moments
if and only if the sequences of the smallest eigenvalues of the basic Hankel matrices and of the shifted Hankel matrices both converge to strictly positive numbers:
Equivalently, the measure μ is determinate by its moments if and only if
at least one of the sequences of the smallest eigenvalues of the basic Hankel matrices and of the shifted Hankel matrices converges to zero as
Available in the literature are equivalent variations of the formulations of the above results. The proofs, however, may rely on different ideas and techniques.
1.4. About the Novelties in Our Approach
Crucial in our approach is to exploit the following:
- The geometric interpretation of the indeterminacy conditions as developed by Merkes-Wetzel [21].
Both these are among the novelties in our exposition. They are properly used and combined with results from Shohat-Tamarkin [5], Akhiezer [6], and Schmüdgen [8] and a frequent referring to Berg-Chen-Ismail [13] or Berg-Thill [20]. Going this way, we arrive at a unified presentation of classical results in both Hamburger and Stieltjes cases.
As far as we are aware, there is no work, until now, giving such a presentation of the most significant classical results on moment problems based on ideas and techniques similar to those used in this paper. We found it a little strange that the paper by Merkel-Wetzel [21] was somehow neglected for a long time. It is not in the list of references in papers and books written by leading specialists on the moment problem. The only proper citation and comments are given by Wulfsohn [24]. In our opinion, the geometric interpretation of the indeterminacy conditions has a value on its own, it is fresh and convincing, and deserves attention. The idea is quite simple. Based on the complete moment sequence , we build up the so-called parabolic limit region in the plane, and then we look at the position of the point . All depends on where this point is located: inside or outside of the region, or on its boundary. Later on, we give details and clear graphical illustrations.
We exploit intensively several properties of perturbed symmetric matrices, which allows to derive new lower bound used to conclude the indeterminacy property. Our bound is comparable with the lower bound derived in Berg-Chen-Ismail [13] by using orthogonal polynomials.
We provide a little different arguments, based on Krein-Nudelman [2] for concluding the determinacy property.
1.5. Moment Determinacy in Probability Theory
It is worth mentioning that there are results which are of the sort ‘if and only if’. Usually, they are compactly formulated, fundamental in their content, and mathematically beautiful. However, such results are difficult to prove and the conditions involved are practically impossible to check, hence the name ‘uncheckable conditions’.
If one assumes that , i.e., that the total mass is , then is a probability measure. Well known is the important role played by the moments in Probability and Statistics, and especially in their applications. This is why a special attention has been paid over a century on finding another sort of ‘relatively easier’ conditions, which are only sufficient or only necessary for either determinacy or indeterminacy of a probability distribution. Nowadays, a variety of ‘checkable conditions’ (Cramér, Hardy, Carleman, Krein) are available in the literature. The checkable conditions have their analytical value and are more than useful in several applied areas, see, e.g., Janssen-Mirbabayi-Zograf [25].
The paper by Lin [26] is a rich and valuable source of information on classical and recent results on moment determinacy of probability distributions; see also Stoyanov-Lin-Kopanov [27]. The present paper is intrinsically related to another subsequent paper which is in preparation, see Lin-Stoyanov [28].
1.6. Structure of This Paper
The rest of the paper is organized as follows. In Section 2, we treat the Hamburger case and discuss conditions for (in)determinacy. Based on the geometric interpretation of the indeterminacy conditions, we re-derive in a different way already known results by Berg-Chen-Ismail [13]. In Section 3, we follow the same line of reasoning and establish results in the Stieltjes case announced in Berg-Thill [20]. In both cases, we provide necessary and sufficient determinacy conditions in terms of the asymptotic behavior, as , of two sequences of smallest eigenvalues, namely and . We also provide a new lower bound for , which is related to the indeterminacy of the measure involved. Section 4 presents details on the smallest eigenvalues and their lower bounds calculated in different ways. The numerical illustrations involve commonly used probability distributions. Brief concluding comments are given in Section 5.
2. Hamburger Moment Problem
Before moving further, we discuss some known tools and results which will be used.
2.1. Limit Parabolic Region
From Shohat-Tamarkin [5], p. 5 or Akhiezer [6], p. 30, we know that is the moment sequence of a measure with support if and only if for all . In such a case an H-sequence is called positive definite.
Suppose now that is a moment sequence for which we ‘keep fixed’ the moments while we treat as ‘varying continuously’ the moments and If letting , the whole moment sequence can be written as . The numbers x and y, i.e., the moments preceding , can not be arbitrary. Moreover, if for , the moments are fixed, there is always a range for the possible values of the ‘previous’ moment , the moment just before . For example, the following two-sided bound for holds:
Here the second relation is the Lyapunov’s inequality, while the lower bound , i.e., the smallest possible value of , is the unique number, the solution of the equation:
We now turn to an H-moment sequence and the geometric interpretation of the indeterminacy conditions for the corresponding measure. Following Merkes-Wetzel [21], we fix n and consider the moments . We keep ‘untouched’ , and assume that and are ‘varying continuously’. For each n, the relation defines a closed convex region, , which is bounded by a proper parabola with horizontal axis and vertex in the right-half plane. Since for the Hankel matrices are positive semidefinite, the regions are nested, . Of interest is their intersection , called a limit parabolic region. One possibility is that is a ‘proper’ closed region in the right-half plane such that is bounded by a proper parabola and containing the initially given moments The other possibility is to degenerate to just a ray, as explained below.
2.2. Determinacy Criteria and Their Geometric Meaning
In this subsection, we provide a geometric interpretation of the determinacy criterion in the Hamburger case. The next two results, Theorems 1 and 2, play a fundamental role.
Theorem 1
(Shohat-Tamarkin [5], Theorem 2.18). Let μ be a measure associated with the positive definite Hamburger moment sequence Then, μ is determinate (unique) if and only if at least one of the two sequences of ratios:
has a limit zero as , i.e., either or .
Theorem 2
(Merkes-Wetzel [21], Theorem 1). Let be a Hamburger moment sequence for the measure μ. Then, μ is indeterminate if and only if the point is an interior point of the limit parabolic region .
Theorem 1 has an interesting and enlightening geometric meaning. In fact, the following relations hold:
where comes from the equation So, the sequence is monotonic nondecreasing and, as , it is converging with . The number is defined from the relation . It is remarkable that the difference is equal to the length of the ‘latus rectum’ of the bounding parabola; see Merkes-Wetzel [21], Lemma 1. The sequence of positive numbers is nondecreasing in n. Then, as and , the length of the latus rectum tends to zero and the limit parabolic region becomes a ray; see Figure 1 (the red bold line).
There are two possibilities for the measure with the moments .
Case 1: the measure is H-indeterminate. From Theorem 2, we have that:
It follows that the limit parabolic region is bounded by a nondegenerate parabola and the point is interior for the limit parabolic region , as can be seen in Figure 1.
Case 2: the measure is H-determinate. In view of Theorem 1, the limit parabolic region admits three distinct shapes. More precisely, Figure 2 is analogues to Figure 1 when . The two red bold lines in Figure 1 and in Figure 2 are referred to the two other (degenerate) parabolic regions (they become rays). This happens when either or , respectively.
Now, from Theorem 2, the following result is promptly obtained: since the point is on the boundary of the limit parabolic region, we have , and hence, Consequently, we arrive at the following statement.
Corollary 1.
If the Hamburger moment sequence generates a measure μ which is determinate, then the monotonic decreasing sequence has limit zero as , i.e.,
2.3. Eigenvalues of Perturbed Symmetric Matrices
Recall first that Berg-Chen-Ismail [13] used orthonormal polynomials to find a lower bound for the smallest eigenvalue , see their equation (1.14). If taking large n and the fact that the limit is strictly positive, they conclude the indeterminacy of the measure associated with a Hamburger moment sequence.
We are going now to derive properties of the smallest eigenvalues of a family of ‘perturbed’ symmetric matrices. This allows to derive a lower bound for , which is a little different from the quantity found in the above cited paper. This, together with Theorems 1 and 2, leads to an alternative proof of Theorem 1.1 in Berg-Chen-Ismail [13]. Moreover, this approach can and will be followed to study the Stieltjes case; see Section 3.
Thus, suppose that we have the H-moment sequence and let for some fixed For a ‘small’ number and being the unit fundamental vector in , we define the following matrix:
which is symmetric, positive semidefinite, and of rank 1. This E will play the role of a ‘perturbation matrix’ of a Hankel matrix. Consider now the matrices:
Here is the Hankel matrix based on the moments , while the matrix is based on .
As a consequence of the simple form of E, the eigenvalue of the matrix and the eigenvalue of the perturbed matrix are closely related to one other as follows (see, e.g., Wilkinson [23], formula (41.8), p. 94-98 and Golub-Van Loan [22], Theorem 8.1.8, p. 397):
where
Moreover, are real numbers, each in the interval with sum . The latter equality comes from (1) and the obvious fact for traces of matrices: .
Now, we suitably specify (1) by using the assumption that and by setting . Hence, (1) and (2) become:
and
Applying Lagrange’s theorem to the right-hand side of (3) on the interval , we obtain that for some number one holds:
Let us list some consequences from (5).
First, all eigenvalues are monotonically increasing with respect to ; since , (1) implies that , which means that each , , is shifted by an amount which lies between zero and the positive number .
Second, combining (5) and (4) and taking , for , we see that takes a positive constant value, , while . Hence, if and , we find that for , which exhibits a different limit behavior compared with . Thus, this shows that is asymptotically linearly increasing in .
Third, from the relations , coming from Theorem 1 and their geometric meaning, one has:
Differentiating both sides with respect to , we find:
from which
Combining (6) with (5) shows that one holds . Hence, we conclude that the function is monotonic decreasing as increases, which means that is a concave function.
Summarizing our findings above show that in this H-indeterminate case, we deal with two strictly positive quantities, namely and . We use these facts to prove the following statement.
Lemma 1.
Assume that . Then, as , the sequence admits a positive limit, denoted by , in the sense that for a suitable number we will have:
Proof.
We observe first that cannot be directly drawn by taking the limit in (6), although each of the quantities and has a limit. Our arguments are given in the next three steps.
- Step 1.
- Consider (5). As , has a limit. Furthermore, we have that . As a consequence, we have the relations:Equivalently, both limiting quantities and exist, and moreover, we have the relations .
- Step 2.
- For fixed n, consider the interval and the function . From the concavity of , as increases, each of the quantities is decreasing. This implies that both and are increasing in
- Step 3.
- Combining Step 1 and Step 2, we see that there exists a number such that .From (5) with , it follows that:This means that the number indeed exists.
□
From (6) we find the required lower bound for the eigenvalue :
which was one of our goals. With (7), we are in a position to formulate and confirm the validity of the well-known Theorem 1.1 in Berg-Chen-Ismail [13]. Note that we are arriving at this result in a different way.
Theorem 3.
Suppose that μ is a measure associated with the Hamburger moment sequence and let be the smallest eigenvalue of the Hankel matrix Then, μ is determinate
if and only if:
Proof.
In one direction, if we assume that is H-determinate, from Corollary 1, we have . In the other direction, if is H-indeterminate, in view of Lemma 1, would have a positive lower bound (7). □
Most important, this is a criterion for determinacy in the Hamburger moment problem. Remarkable is the fact that involved are only the basic Hankel matrices . Recall that the classical result of Hamburger [14,15,16] involves the basic matrices and the shifted matrices . The proof in Berg-Chen-Ismail [13], as well our proof above, do not rely on results in Hamburger [14,15,16].
We can say a little more. Recall the following known chain of relations from Akhiezer [6], pp. 84–85:
where is the nth orthonormal polynomial for the measure . Then, if the function for all , the measure is indeterminate. The lower bound in (7) is then replaced by:
In a sense, this lower bound is similar to the bound found by Berg-Chen-Ismail [13], Equations (1.14)–(1.15). In both cases, the conclusion drawn is, of course, the same.
3. Stieltjes Moment Problem
In this case, we develop a procedure which is similar to that followed in the Hamburger case, with some specifics. We rely essentially on two known results, Theorems 3 and 4.
Theorem 4
(Merkes-Wetzel [21], Lemma 3). The measure μ associated with the positive definite Stieltjes moments sequence is determinate if and only if at least one of the following sequences:
has a limit zero as , i.e.,
It is useful to mention that Theorem 3 has the following geometric meaning: , where the number is the unique solution of the equation . The numerical sequence is monotonic nondecreasing and, as , convergent to a limit, say , where .
Theorem 5
(Merkes-Wetzel [21], Theorem 2). The positive definite Stieltjes moment sequence generates an indeterminate measure μ if and only if two conditions are satisfied: (i) the point is interior for the limit parabolic region ; (ii) .
We recall that every Stieltjes sequence can also be considered as a Hamburger sequence; see, e.g., Chihara [29]. Hence, the existence of the limit parabolic region is assured and defined by the two relations, and . Here, we use the notations and . Either is a ray, or is the intersection of proper limit parabolic regions in the half plain .
Consider the shifted Hankel matrix , its smallest eigenvalue , and the perturbation matrix E, the same as previously defined in the Hamburger case. First, we want to show that in the S-indeterminate case the estimate of as varies and the estimate of as varies are equivalent procedures; just replace and with and .
Now, we need a result, which is a criterion for S-indeterminacy:
Suppose that μ and are measures associated with the moment sequence and the shifted moment sequence , respectively. Then, μ is S-indeterminate
if and only if
both μ and are H-indeterminate.
This statement is from Krein-Nudelman [2], p. 199, P.6.8., where it is left as an exercise to the readers. For the sake of completeness, we include here the proof.
Indeed, assume that is S-indeterminate. This implies the H-indeterminacy of and S-indeterminacy of . The latter yields H-indeterminacy of If assuming that both and are H-indeterminate, we use Theorem 1 (formulated for determinate measures). Thus, we have two limiting relations, and , where and By Theorem 4, we conclude that is S-indeterminate.
We can use Theorem 2 and describe alternatively the S-indeterminacy and also the H-indeterminacy in geometric terms. For this purpose, we introduce two limit parabolic regions, in the Hamburger case, and in the Stieltjes case. With the convention , we define:
As before, is a measure corresponding to the Stieltjes moment sequences We have the following transparent interpretation:
The measure μ is S-indeterminate, and hence, also H-indeterminate, if and only if two conditions are satisfied: (i) the point is interior for the region ; (ii) the point is interior for the region
Since , we refer to (7) and write down the following lower bound of the smallest eigenvalue of the shifted Hankel matrix :
Note that this bound is related to the determinacy of the measure with
Let us summarize the above findings: if a measure is S-indeterminate, it is also H-indeterminate. However, an S-determinate measure can be either H-determinate or H-indeterminate. Thus, we have the cases, briefly discussed bellow.
Case 1: is S-indeterminate and H-indeterminate. From Theorem 2.1 and Theorem 4, we have the inequalities and . Then, from (8) and (9) it follows that and . Conversely, if and , then the following two relations hold: and .
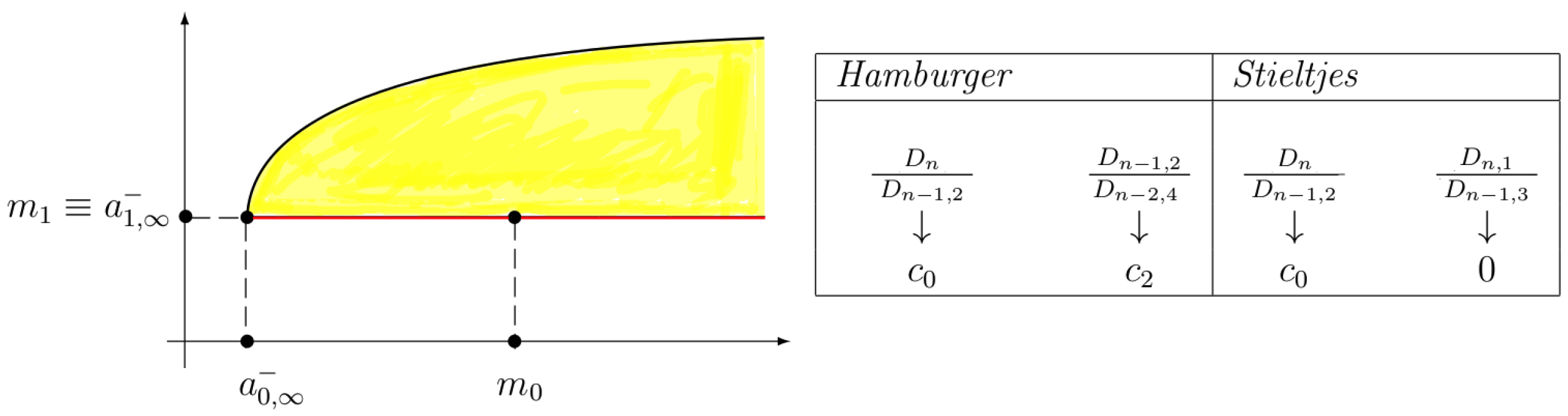
Case 2: is S-determinate and H-indeterminate; see Merkes-Wetzel [21], Corollary, p. 417. Since is S-determinate, Theorem 4 implies that and then that . Conversely, starting with , the relation follows from the S-determinacy (see Figure 3).
Remark 1.
The S-determinate measure on in Case 2 is the Nevanlinna-extremal measure and the corresponding Pick function coincides with a constant equal to zero. Hence, is a discrete measure concentrated on the zeros of the D-function in the Nevanlinna parametrization, . In particular, has a mass at 0. For details, see Berg-Valent [12], Remark 2.2.2, p. 178.
One possibility to construct a measure which is S-determinate and H-indeterminate is to start with a moment sequence associated with S-indeterminate measure; hence, this moment sequence corresponds also to H-indeterminate measure. Then, the idea is to modify this sequence and get another one, , associated with an S-determinate measure, which is H-indeterminate. Such a specific construction is given in Schümdgen [8], Example 8.11, p. 183. It is shown (we do not give details here) how to calculate a proper constant and define the new moments by for Related relevant details can be found in Simon [9], p. 96, Theorem 3.3.
Case 3: is S-determinate and H-determinate. For a given moment sequence, S-determinacy means that there is only one measure with support . Regarding H-determinacy, Corollary 1 provides an exhaustive answer.
Clearly, important is the value of the limit . Combining Theorems 1–4, we find that there are four possible limit parabolic regions, (a)–(d), and they are all feasible. Below are the details.
(a) From Case 1 (S-indeterminate and H-indeterminate), we deal with a moment sequence , whose associated discrete measure, say , has a mass at 0 (this comes from the H-indeterminacy condition ). Next, consider the measure related to via the relation . The moments sequence of the measure differs from only at the zero-th entry (see Berg-Christensen [1], Theorem 7, p. 111). Hence, has mass zero at 0, so that . From Theorems 1 and 3 and their geometric meaning we conclude for both properties, H-determinacy and S-determinacy. The limit parabolic region is nondegenerate with on its boundary and , so that one holds (see Figure 4).
(b) Here, we have a nondegenerate limit parabolic region such that the point is on its boundary (which implies H-determinacy) and that The latter implies S-determinacy and then . In this case, the unique measure, say is related to the measure , involved in the above Case 2 (S-determinate and H-indeterminate) by the relation . By analogy with the previous item (a), the measure has a moment sequence , which differs from only by the very first entry indexed by 0 (zero).
(c) and (d) Here, the limit parabolic regions are rays so that from the relation it follows that . Hence, in both (c) and (d), we have that . Graphically, see the red lines in Figure 3 and in Figure 5, respectively. It is interesting to mention that, if having S-determinate and H-determinate, each of the relations and may occur.
The findings in Cases 1–3 above can be summarized as follows:
- If μ is H-indeterminate, equivalently, if , then the condition is necessary and sufficient for μ to be S-determinate.
- If μ is H-determinate, then is a necessary and sufficient condition for μ to be S-determinate. Note that each of the relations may may occur.
The arguments used in Cases 1, 2, and 3 above can be alternatively expressed in terms of the smallest eigenvalues of Hankel matrices, thus arriving at a result which is equivalent to the known result in Berg-Thill [20], Proposition 2.3.
Theorem 6.
A Stieltjes moment sequence corresponds to exactly one measure on the positive real axis if and only if
the smallest eigenvalues of either or of tend to 0, as , that is:
Remark 2.
If we do not involve the lower bounds for the smallest eigenvalues of Hankel matrices, Theorem 6 can be easily proved by combining the Krein-Nudelman’s statement used above, with the main result in Berg-Chen-Ismail [13].
Indeed, from Krein-Nudelman’s result, we have that the measure with moments is S-indeterminate if and only if H-indeterminate are both the measure with moments and the measure with the shifted moments . The opposite statement is: with is S-determinate if and only if either with is H-determinate, or with is H-determinate. In terms of Theorem 1.1 in Berg-Chen-Ismail [13], the last statement sounds as follows: with is S-determinate if and only if or .
We turn now to an important result relating S-determinacy and H-determinacy. Such a result is proved by Schmüdgen [8], Corollary 8.9, p. 183, in the framework of the operator-theoretic approach and by Heyde [30], Theorem A, p. 91, using continued fractions. We give a different short proof involving limit parabolic regions.
Theorem 7.
Suppose is a Stieltjes moment sequence associated with the measure μ. If μ is S-determinate with zero mass at zero, , then μ considered on , is also H-determinate.
Proof.
Since is an S-determinate measure on , there are two options. One is that is H-indeterminate. Then, referring to the Remark after Case 2 above, must have a mass at 0, which is not the case. Thus, it remains the second option for , namely, that is H-determinate. Indeed, if turning to Theorems 1–4, we see that the limit parabolic regions in items (a), (b), and (d), see Case 3 above, are compatible with the statement of Theorem 7. Note that, however, the parabolic region (no figure) in item (c) has to be excluded, because of the appearance of a mass , which contradicts the assumption. □
All measures/distributions satisfying the conditions of Theorem 7 are related to shifted Hankel matrices whose smallest eigenvalues may have different limits, as , e.g., or . Clearly, Theorem 7 can be formulated in other equivalent forms.
It is useful to provide here a result of Heyde [30], his ‘Theorem B’, which we paraphrase as follows.
Theorem 8.
We are given a Stieltjes moment sequence and let the associated probability measure μ be S-determinate with no mass at zero: .
Suppose that for fixed a mass has been ‘added’ at the origin 0 and the distribution μ has been renormalized.
Then, it is possible that the new moment sequence:
generates a new distribution, say , which is S-indeterminate.
Proof.
Indeed, from Theorem 7, the measure with moments is S-determinate and H-determinate and these properties are in agreement with the conclusions from the limit parabolic regions in items (a), (b), and (d). The assumption changes the picture. The normalized measure for the new sequence is compatible with the following subcases: (i) is H-indeterminate and S-indeterminate; (ii) is H-indeterminate and S-determinate; (iii) is H-determinate and S-determinate. In fact, subcase (i) proves Theorem B in Heyde [30]. □
It is useful to add a few words. The statement in Heyde’s Theorem 2 means that the shifted Hankel matrix based on the new moment sequence has a smallest eigenvalue such that . If we look at all subcases (i), (ii), and (iii), we see that, as , either or
4. More on the Lower Bounds
Let us start with the Hamburger case. It is well known and we have seen in the previous sections that there are some quantities which are important for deciding whether or not a measure is determinate or indeterminate. The modern technology allows ‘easily’ to perform computations with good accuracy. Thus, in principle, having computed some quantities, would allow to make either preliminary or definite conclusions.
Recall, writing below means that are the basic Hankel matrices defined for the moment sequence On several occasions, we have introduced and used the numbers for , and , see Section 3. It turns out, as , their asymptotic behavior is different, namely: we have for , while . As a consequence, if is finite, then for each n, it holds that strictly.
Proposition 1.
Suppose that the following conditions are satisfied:
Proof.
Indeed, from Berg-Chen-Ismail [13], equations (1.12)–(1.13), it follows:
To get the most left standing term we have neglected the quantity . From relation (6) we find that:
In this inequality neglected/omitted is the quantity . Conditions (11) show that for the two neglected quantities we have:
Thus, the relationship (4.2) between the two lower bounds is established. □
Having (4.2), we can take a limit, as by preserving all relations. We use the fact that the numbers have a limit, as , and we used for it the notation . The conclusion, after passing to the limit, is as follows:
Relations (12) and (13) can eventually be validated through numerical examples. However, first, the assumptions (11) have to be verified and guaranteed. For practical purposes, we need to take an n that is large enough, and follow three steps:
- Step 1.
- The quantity =: to be replaced by .
- Step 2.
- The difference to be replaced by This is justified by the fact that .
- Step 3.
- The number will also be replaced appropriately. The matrix is symmetric and diagonalizable and let us assume that is a simple eigenvalue with its associated eigenvector . We use the notation to indicate that the moment can ‘vary’, so we find that (see Golub-Van Loan [20], p. 323). Then, for large n, can be replaced by The eigenvector v can be calculated efficiently by using the Inverse Power method.
A similar approach works also in the Stieltjes case. It is based on the statement by Krein-Nudelman, quoted before. The lower bound (13) involves the matrices , the moment sequence , and the smallest eigenvalues . Now, an analogue to (13) can be established for the shifted items , , and Furthermore, we have to use , the sequence of orthonormal polynomials for the measure , where .
Remark 3.
As we will see below, all numerically computed lower bounds in both Hamburger and Stieltjes cases look tight. In the H-indeterminate case, we have for a lower bound, a positive constant. This agrees with a result in Berg-Szwarc [18], Theorem 4.4. These authors proved that, as the kth smallest eigenvalue of , , tends rapidly to infinity with k. This means that the two neglected terms and , see the proof of Proposition 4.1, are indeed small. In all cases, we have to be careful when using quantities such as , ensuring they are bounded.
5. Numerical Illustrations
While until now, we have used traditional terminology, notations, and arguments for analysis, we now turn to standard probabilistic terminology and arguments. The main concept is the same, though the differences are apparent.
We have chosen two popular and frequently used probability distributions, namely, the Weibull distribution, which includes the exponential distribution, and the Lognormal distribution. Their (in)determinacy properties are well described and available in the literature. The reader can consult, e.g., Lin [26] or Stoyanov-Lin-Kopanov [27]. Our goal now is to use the lower bounds for the smallest eigenvalues of Hankel matrices and, in a sense, confirm these (in)determinacy properties. We give two examples. Example 1 is related to the content of the paper by Chen-Lawrence [17] dealing with the weight function Note that, after normalizing w, it becomes the density function of the Weibull distribution (also called ‘generalized gamma distribution’). Example 2 is similar to Example 3.1 in Berg-Chen-Ismail [13], in which the authors start with the weight function , where f is the standard lognormal density. The treatment in these two papers is entirely analytic, no probabilistic notions involved.
Example 1.
(Weibull distribution). We say that a random variable X has a Weibull distribution with parameter , if its probability density function is of the form:
Here is the normalizing constant. We easily see that all moments are finite; and can be expressed via the Euler gamma function. The (in)determinacy property of X depends on the value of . It turns out, is the boundary point: if , X and its distribution are determinate, while they are indeterminate for any
Consider now as a Stieltjes moment sequence and as a Hamburger moment sequence.
We want to make the above conclusions by computing the lower bounds of the smallest eigenvalues of the Hankel matrices and
As an illustration, assume that , expecting to obtain S-indeterminacy and also H-indeterminacy. These conclusions are correct if based, e.g., on specific computations performed for Here are our conclusions:
- is H-indeterminate, which follows from the relations:.
- is S-indeterminate, since:.
As a continuation, take so we deal with a random variable the exponential distribution with parameter 1, its density function is All moments of Y are finite, In a few different ways, we can show that Y, and hence, also , is determinate.
Moreover, for any power we easily find the density function, and hence, the distribution function (the measure), and see that all moments are finite; they are expressed via the Euler gamma function. The interesting property is that is determinate for , and indeterminate for
These conclusions can be derived from computed lower bounds of the smallest eigenvalues of Hankel matrices. We can write the matrices and compute that if , then and for large n. This confirms that indeed is S-determinate and also H-determinate. It is not surprising to observe that if r is ‘close’ to the boundary , the convergence to zero is quite slow.
It is instructive to make one step more by considering the random variable Z, where:
Notice that the number 3 is the smallest positive integer power such that is indeterminate. Its moments are The sequence , being a Stieltjes moment sequence, can be considered also as a Hamburger moment sequence. We want to draw a conclusion for based on calculated lower bounds of the smallest eigenvalues of the corresponding Hankel matrices. With a reasonable accuracy of the computations, we arrive at the following conclusions:
- is H-indeterminate, because:
- is S-indeterminate, since:
Example 2.
(Lognormal distribution). We say that the random variable follows a lognormal distribution, , if its density function is:
All moments are finite, and Note that is the best-known moment indeterminate absolutely continuous probability distribution.
Let us draw the indeterminacy property from computed lower bounds for the smallest eigenvalues of the corresponding Hankel matrices. Thus, being a Stieltjes moment sequence can also be considered as a Hamburger moment sequence. With a reasonable computational accuracy, our results and conclusions are as follows:
- is H-indeterminate, which follows from the relations:
- is S-indeterminate, because:
6. Brief Concluding Comments
We exploit the geometric interpretation of indeterminacy conditions and fine properties of the eigenvalues of perturbed symmetric matrices and give a unified exposition of a bunch, or a series of, classical results in the problem of moments. Our paper throws an additional light on the phenomena ‘uniqueness’ and ‘nonuniqueness’ (determinacy and indeterminacy) of measures in terms of their moments. In general, it is always useful to have in our disposal different approaches, ideas, and techniques which lead either to the same final conclusions or allow to establish new results. This enhances the theory and makes it more applicable by providing the freedom to choose and use properly the most appropriate tools.
Despite the practical difficulty, in fact the impossibility, to check the determinacy or indeterminacy conditions involving the smallest eigenvalues of Hankel matrices, the results discussed in this paper have been, are, and will remain fundamental in mathematics. The numerical illustrations given above indicate that at least some of these results can be adopted and used in applications when dealing with specific measures/probability distributions.
Author Contributions
All authors took equal part in all stages and aspects of preparing and completing this paper. The five figures were produced by P.L.N.I. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
We are grateful to the editors and the technical staff at MDPI for their understanding and support during the preparation of this paper. Our thanks are addressed to the two anonymous reviewers for their useful relevant comments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Berg, C.; Christensen, J.P.R. Density questions in the classical theory of moment. Ann. Inst. Fourier 1981, 31, 99–114. [Google Scholar] [CrossRef]
- Krein, M.G.; Nudelman, A.A. The Markov Moment Problem and Extremal Problems. (Ideas and Problems of P.L. Chebyshev and A.A. Markov and Their Further Development); American Mathematical Society: Providence, RI, USA, 1977; (Original edition, Nauka, Moscow, 1973). [Google Scholar]
- Stieltjes, T.J. Recherches sur les fractions continues. Annales Fac. Sci. Univ. Toulouse 1894, 8, J1–J122. [Google Scholar] [CrossRef]
- Stieltjes, T.J. Recherches sur les fractions continues. Annales Fac. Sci. Univ. Toulouse 1895, 9, A5–A47. [Google Scholar] [CrossRef]
- Shohat, J.A.; Tamarkin, J.D. The Problem of Moments; Math. Surveys No. 1; American Mathematical Society: Providence, RI, USA, 1943. [Google Scholar]
- Akhiezer, N.I. The Classical Moment Problem and Some Related Questions in Analysis; Oliver and Boyd: Edinburgh, UK, 1965; (Original edition, Nauka, Moscow, 1961). [Google Scholar]
- Berg, C.; Christensen, J.P.R.; Ressel, P. Harmonic Analysis on Semigroups. Theory of Positive and Related Functions; Springer: New York, NY, USA, 1984. [Google Scholar]
- Schmüdgen, K. The Moment Problem; Graduate Texts in Mathematics 277; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Simon, B. The classical moment problem as a self-adjoint finite difference operator. Ann. Math. 1998, 137, 82–203. [Google Scholar] [CrossRef]
- Sodin, S. Lecture Notes on the Moment Problem; Department of Mathematics, Queen Mary University of London: London, UK, 2019; Available online: https://webspace.maths.qmul.ac.uk/a.sodin/teaching/moment/clmp.pdf (accessed on 31 August 2023).
- Olteanu, O. Symmetry and asymmetry in moment, functional equations and optimization problems. Symmetry 2023, 15, 1471. [Google Scholar] [CrossRef]
- Berg, C.; Valent, G. The Nevanlinna parametrization for some indeterminate Stieltjes moment problems associated with birth and death processes. Methods Appl. Anal. 1994, 1, 169–209. [Google Scholar] [CrossRef]
- Berg, C.; Chen, Y.; Ismail, M.E.H. Small eigenvalues of large Hankel matrices: The indeterminate case. Math. Scand. 2002, 91, 67–81. [Google Scholar] [CrossRef]
- Hamburger, H. Über eine Ertweiterung des Stieltjesshen Momentenprobemes. Math. Annalen 1920, 81, 235–317. [Google Scholar] [CrossRef]
- Hamburger, H. Über eine Ertweiterung des Stieltjesshen Momentenprobemes. Math. Annalen 1920, 82, 120–164. [Google Scholar] [CrossRef]
- Hamburger, H. Über eine Ertweiterung des Stieltjesshen Momentenprobemes. Math. Annalen 1920, 82, 168–187. [Google Scholar] [CrossRef]
- Chen, Y.; Lawrence, N.D. Small eigenvalues of large Hankel matrices. J. Phys. A 1999, 32, 7305–7315. [Google Scholar] [CrossRef]
- Berg, C.; Szwarc, R. The smallest eigenvalue of Hankel matrices. Construct. Approx. 2011, 34, 107–133. [Google Scholar] [CrossRef]
- Chen, Y.; Sikorowski, J.; Zhu, M. Small eigenvalues of large Hankel matrices at critical point: Comparing conjecture of parallelised computation. Appl. Math. Comput. 2019, 363, 124628. [Google Scholar]
- Berg, C.; Thill, M. A density index for the Stieltjes moment problem. (Symposium on Orthogonal Polynomials, Erice, Sicily). In Polynomials and Their Applications; Brezinski, C., Gori, L., Ronvaux, A., Eds.; J.C. Baltzer AG Science Publishers, IMACS: Amsterdam, The Netherlands, 1991; pp. 185–188. [Google Scholar]
- Merkes, E.P.; Wetzel, M. A geometric characterization of indeterminate moment sequences. Pacific J. Math. 1976, 65, 409–419. [Google Scholar] [CrossRef]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; Johns Hopkins University Press: Baltimore, MD, USA, 1996. [Google Scholar]
- Wilkinson, J.H. The Algebraic Eigenvalue Problem; Clarendon Press: Oxford, UK, 1985. [Google Scholar]
- Wulfsohn, A. Measure convolution semigroups and noninfinitely divisible probability distributions. J. Math. Sci. 2005, 131, 5682–5696. [Google Scholar] [CrossRef]
- Janssen, O.; Mirbabayi, M.; Zograf, P. Gravity as an ensemble and the moment problem. JHEP (SISSA) 2021, 6, 19. [Google Scholar] [CrossRef]
- Lin, G.D. Recent developments on the moment problem. J. Statist. Distrib. Appl. 2017, 4, 1–17. [Google Scholar] [CrossRef]
- Stoyanov, J.; Lin, G.D.; Kopanov, P. New checkable conditions for moment determinacy of probability distributions. Theory Probab. Appl. 2020, 65, 497–509. [Google Scholar] [CrossRef]
- Lin, G.D.; Stoyanov, J.M. Moment Analysis of Probability Distributions: A Bunch of Old and New Checkable Determinacy Conditions. Symmetry 2023. coming soon. [Google Scholar]
- Chihara, T.S. On indeterminate Hamburger moment problem. Pacific J. Math. 1968, 27, 475–484. [Google Scholar] [CrossRef]
- Heyde, C.C. Some remarks on the moment problem. Quart. J. Math. Series 2 1963, 14, 91–96. [Google Scholar] [CrossRef]
Figure 1.
Parabolic region for H-indet case.

Figure 2.
Parabolic region for H-det case.

Figure 3.
Parabolic region for S-det—H-indet case.

Figure 4.
Parabolic region for S-det with H-det-(a).

Figure 5.
Parabolic region for S-det with H-det-(b).

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Novi Inverardi, P.L.; Tagliani, A.; Stoyanov, J.M. The Problem of Moments: A Bunch of Classical Results with Some Novelties. Symmetry 2023, 15, 1743. https://doi.org/10.3390/sym15091743
AMA Style
Novi Inverardi PL, Tagliani A, Stoyanov JM. The Problem of Moments: A Bunch of Classical Results with Some Novelties. Symmetry. 2023; 15(9):1743. https://doi.org/10.3390/sym15091743
Chicago/Turabian StyleNovi Inverardi, Pier Luigi, Aldo Tagliani, and Jordan M. Stoyanov. 2023. "The Problem of Moments: A Bunch of Classical Results with Some Novelties" Symmetry 15, no. 9: 1743. https://doi.org/10.3390/sym15091743
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.