Conflicting Information Fusion Based on an Improved DS Combination Method


Abstract
:1. Introduction
2. Review of DS Theory
2.1. Frame of Discernment
2.2. Mass Function
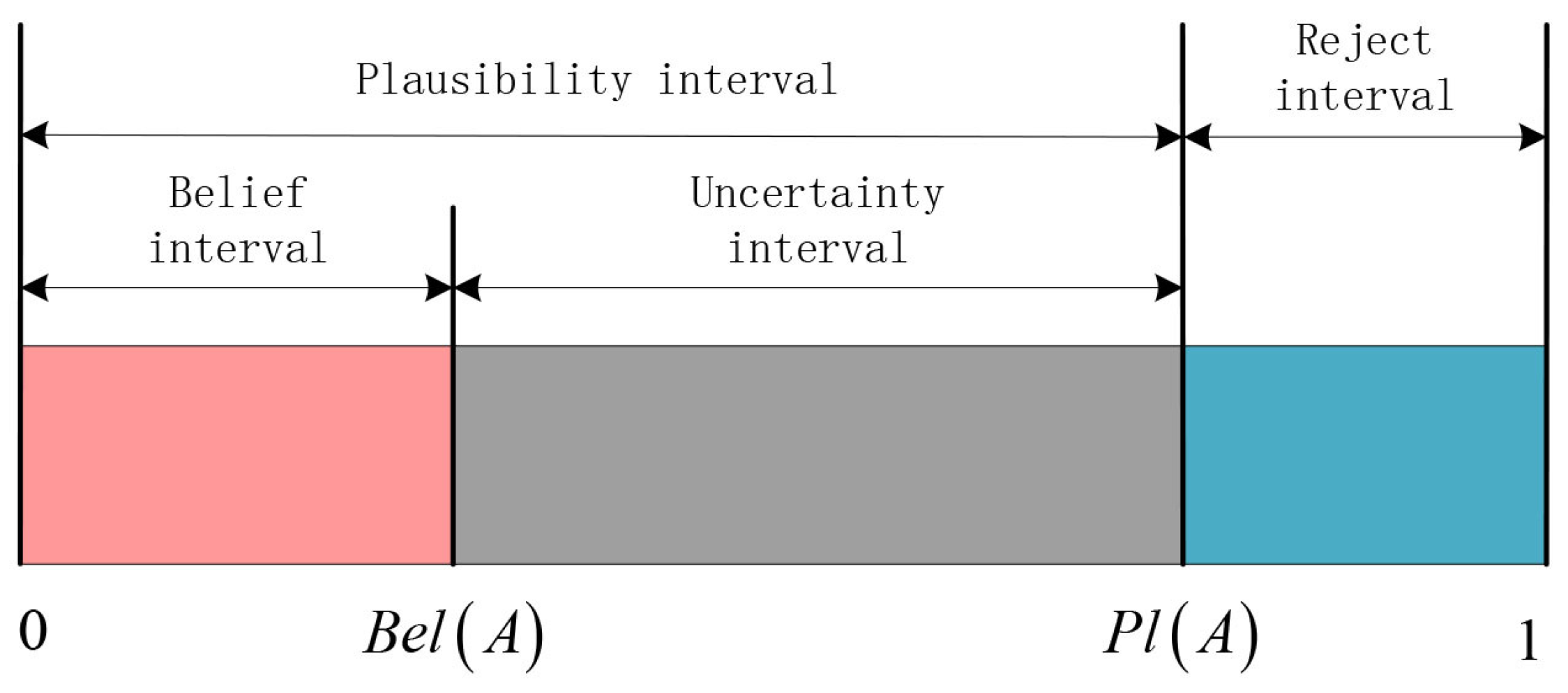
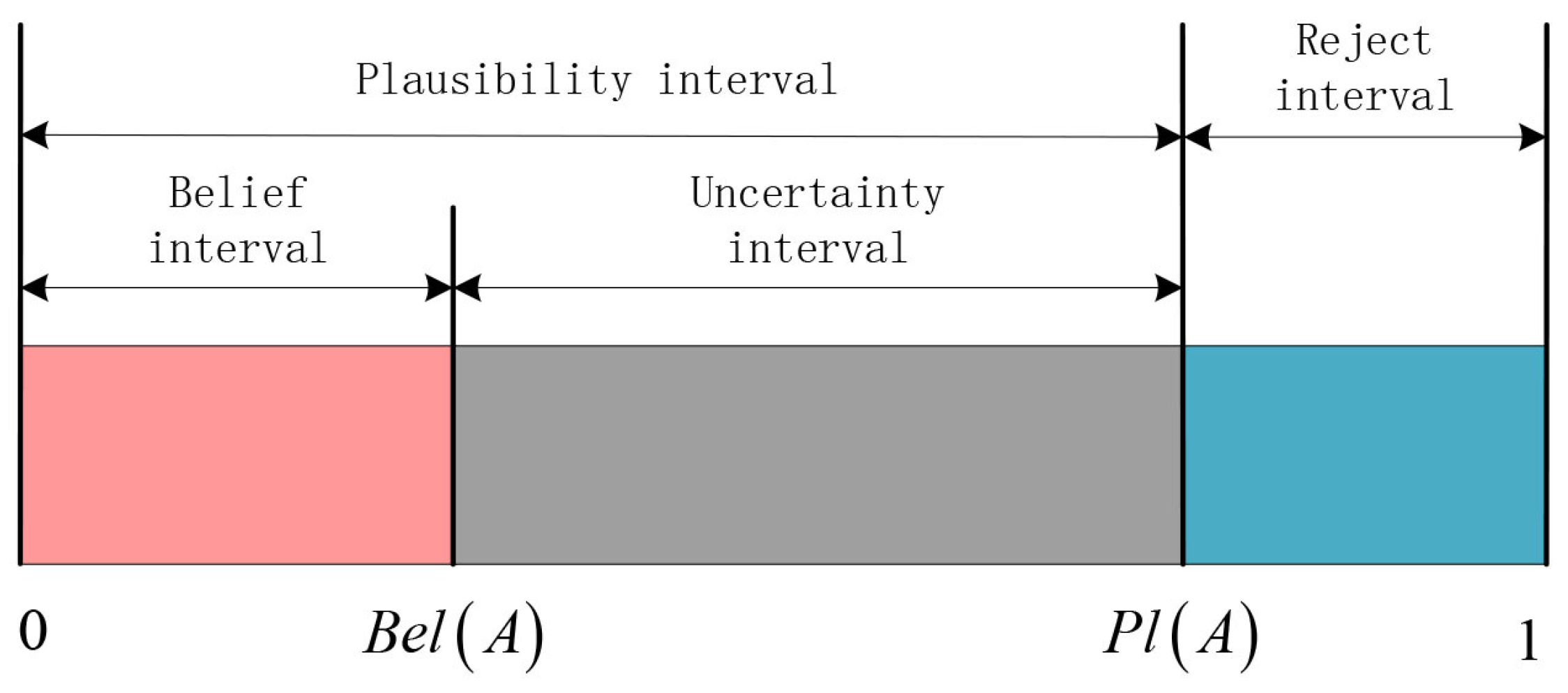
2.3. Uncertainty Quantization
2.4. DS Combination Rule
3. Limitations of Traditional DS Theory
4. Existing Modified Methods
4.1. Modified Combination Method Based on Locally-Conflicting Analyses
4.2. Revised Evidence Method Based on the Mahalanobis Distance Function
5. Improved DS Combination Method
5.1. Two Revised Pieces of Evidence Based on Different Distance Functions
5.1.1. Revised Evidence Based on the Modified Minkowski Distance Function
5.1.2. Revised Evidence Based on the Betting-Commitment Distance Function
5.2. Conflicting Redistribution Strategy Based on Locally-Conflicting Analyses
6. Experimental Results and Analyses
6.1. Multi-Sensor Fusion with Consistent Information
- DS combination method: According to the fusion results of multiple pieces of evidence using DS combination, we can see that although the DS combination correctly identifies the true proposition A, it always totally denies proposition B. The absolute negation is harmful to decision processing in the multi-sensor system. After checking the DS combination rule, we confirm that the unreasonable fusion results are caused by the “one ballot veto” situation as . Thus, the DS combination is not completely effective when combining consistent pieces of evidence.
- The work in [16,17]: Based on the optimization of the DS combination rule, Sun et al. [16,17] obtain relatively reliable fusion results. Notably, we can see from the fusion results that Sun et al. [16] assigns mass to as , which indirectly reflects the system uncertainty; simultaneously, Li et al. [17] supports true proposition A with a bigger probability, which improves the fusion accuracy. Hence, Sun et al. [16,17] have their own characteristics when combining consistent information.
- The work in [24,25]: According to the essential revision of original pieces of evidence, Wei et al. [24,25] achieve correspondingly effective fusion results with an approximate estimation about system uncertainty as . Especially when synthesizing multiple pieces of evidence (), Lin et al. [25] identifies true proposition A with bigger support. Therefore, Lin et al. [25] has better fusion performance than Wei et al. [24].
- The proposed algorithm: No matter how many pieces of evidence are combined, the fusion results of the proposed DS combination method are all rational and effective. Firstly, compared with the DS combination, the proposed algorithm recognizes the correct proposition A and simultaneously assigns certain support to other propositions. Thus, the proposed algorithm guarantees the accurate decision-making condition for the multi-sensor system. Secondly, the proposed algorithm precisely identifies true proposition A with the biggest support compared to other existing modified methods, which embodies its optimal fusion performance when combining consistent information. Last, but not least, the proposed algorithm evaluates the system uncertainty as , which further provides a powerful reference for subsequent information processing.
6.2. Multi-Sensor Fusion with Conflicting Information
- DS combination method: As the “one ballot veto” paradox caused by exists, the DS combination directly assigns the whole support to wrong proposition C, which is apparently discrepant. Comparing with Table 2, the conflicting factors K in Table 4 are generally higher. Hence, the DS combination cannot work anymore in the highly conflicting situations.
- The works in [16,17]: When synthesizing relatively consistent information, Sun et al. [16] indirectly reflects the system uncertainty as . In the highly conflicting situations in Table 4, this advantage is no longer useful. We can seen the fusion results in Table 4 that , where proposition . Thus, Sun et al. [16] cannot identify the true proposition A anymore, which is unacceptable for the multi-sensor fusion system. At this point, even if Li et al. [17] cannot estimate the system uncertainty, its support assignment to proposition A rises with the increasing of reliable pieces of evidence. However, the growth rate of support assignment to proposition A is slow. Therefore, Sun et al. [16,17] has certain limitations when combining highly conflicting information.
- The works in [24,25]: Similar to the analyses of Wei et al. [24,25] when synthesizing consistent information, Lin et al. [25] has better fusion performance than Wei et al. [24] as Lin et al. [25] identifies true proposition A with bigger support. However, the growth rate of support assignment to true proposition A in [25] is slow, which is not conducive to decision-making in the multi-sensor fusion system.
- The proposed algorithm: Firstly, when considering the combination of pieces of evidence , the proposed method does not exhibit good results compared to Li et al. [17,24,25]. Through rational analyses, we find that if there are only two pieces of evidence in the multi-sensor fusion system with high conflicting degree, it is hard for the system to determine which piece of evidence is more reliable. At this point, more sensor information is needed for further combination. This situation indirectly confirms the development demand of the multi-sensor fusion system. Then, with the increasing of pieces of evidence , the reliability of evidence is gradually confirmed. In that case, we can see in Table 4 that the proposed algorithm rapidly increases its support to true proposition A, which is profitable for the multi-sensor fusion system. It is worth mentioning that, when the fusion pieces of evidence are greater than two, the proposed algorithm can identify the true proposition A with the largest support compared with other modified methods. Thus, the great fusion performance and fast convergence ability of the proposed algorithm is proven.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Raol, J.R. Multi-source multi-sensor information fusion. Sadhana 2004, 29, 143–144. [Google Scholar] [CrossRef]
- Li, T.; Corchado, J.M.; Sun, S. Clustering for filtering: Multi-object detection and estimation using multiple/massive sensors. Inf. Sci. 2017, 388, 172–190. [Google Scholar] [CrossRef]
- Caballero-Aguila, R.; Hermosocarazo, A.; Linaresperez, J. New distributed fusion filtering algorithm based on covariances over sensor networks with random packet dropouts. Int. J. Syst. Sci. 2017, 48, 1805–1817. [Google Scholar] [CrossRef]
- Chu, J.F.; Liu, X.W.; Gong, Z.W. Two Decision Making Models Based on Newly Defined Additively Consistent Intuitionistic Preference Relation. In Proceedings of the IEEE International Conference on Fuzzy Systems, Istanbul Turkey, Istanbul, Turkey, 2–5 August 2015. [Google Scholar]
- Deng, X.; Jiang, W. Fuzzy Risk Evaluation in Failure Mode and Effects Analysis Using a D Numbers Based Multi-Sensor Information Fusion Method. Sensors 2017, 17, 2086. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Li, M.; Wang, X. Information Fusion Based on Information Entropy in Fuzzy Multi-source Incomplete Information System. Int. J. Fuzzy Syst. 2017, 19, 1200–1216. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multi-valued mapping. Ann. Math. Stat. 1967, 38, 325–329. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- Jiang, W.; Zhuang, M.; Xie, C. A Reliability-Based Method to Sensor Data Fusion. Sensors 2017, 17, 1575. [Google Scholar] [CrossRef] [PubMed]
- Bhatt, D.; Babu, S.R.; Chudgar, H.S. A novel approach towards utilizing Dempster Shafer fusion theory to enhance WiFi positioning system accuracy. Pervasive Mob. Comput. 2017, 37, 115–123. [Google Scholar] [CrossRef]
- Yin, L.; Zheng, H.; Bian, T.; Deng, Y. An evidential link prediction method and link predictability based on Shannon entropy. Phys. A Stat. Mech. Appl. 2017, 482, 699–712. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Li, Y.B. Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information. Symmetry 2017, 9, 69. [Google Scholar]
- Zadeh, L.A. Book Review: A Mathematical Theory of Evidence. Bull. Am. Math. Soc 1984, 10, 235–247. [Google Scholar] [CrossRef]
- Smets, P. The combination of evidence in the transferable belief model. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 447–458. [Google Scholar] [CrossRef]
- Yager, R.R. On the aggregation of prioritized belief structures. Pattern Anal. Mach. Intell. 1996, 26, 708–717. [Google Scholar] [CrossRef]
- Sun, Q.; Ye, X.Q.; Gu, W.K. A new combination rules of evidence theory. Chin. J. Electron. 2000, 28, 117–119. [Google Scholar]
- Li, B.C.; Huang, J.; Yin, H.J. Two Efficient Combination Rules for Conflicting Belief Functions. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–8 November 2009; Volume 61, pp. 421–426. [Google Scholar]
- Zhang, B.; Lu, H.Z. Combination method of conflict evidence in multi-sensor automatic target recognition. Syst. Eng. Electron. 2006, 28, 857–860. [Google Scholar]
- Zhang, S.Y.; Pan, Q.; Zhang, H. A New Kind of Combination Rule of Evidence Theory. Control Decis. 2000, 15, 540–544. [Google Scholar]
- Murphy, C.K. Combining belief functions when evidence conflicts. Decis. Support Syst. 2000, 29, 1–9. [Google Scholar] [CrossRef]
- Horiuchi, T. Decision rule for pattern classification by integrating interval feature values. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 440–448. [Google Scholar] [CrossRef]
- Deng, Y.; She, W.K.; Zhu, Z.F. Efficient combination approach of conflict evidence. J. Infrared Millim. Waves 2004, 23, 27–32. [Google Scholar]
- Guo, H.W.; Shi, W.K.; Liu, Q.K.; Deng, Y. A new combination rule of evidence. J. Shanghai Jiao-Tong Univ. 2007, 40, 1895–1900. [Google Scholar]
- Wei, Y.C. An improved D-S evidence combination method based on K-L distance. Telecommun. Eng. 2011, 27, 255–257. [Google Scholar]
- Lin, Y.; Wang, C.; Ma, C.G. A new combination method for multisensor conflict information. J. Supercomput. 2016, 72, 2874–2890. [Google Scholar] [CrossRef]
- Deng, Y.; Chan, F.T. A new fuzzy dempster MCDM method and its application in supplier selection. Expert Syst. Appl. 2011, 38, 9854–9861. [Google Scholar] [CrossRef]
- Beynon, M.; Cosker, D.; Marshall, D. An expert system for multi-criteria decision making using Dempster Shafer theory. Expert Syst. Appl. 2001, 20, 357–367. [Google Scholar] [CrossRef]
- Dymova, L.; Sevastjanov, L. An interpretation of intuitionistic fuzzy sets in terms of evidence theory: Decision making aspect. Knowl.-Based Syst. 2010, 23, 772–782. [Google Scholar] [CrossRef]
- Kang, J.; Gu, Y.B.; Li, Y.B. Multi-sensor information fusion algorithm based on DS evidence theory. J. Chin. Inert. Technol. 2012, 20, 670–673. [Google Scholar]
- Zeng, R.; Zhang, L.; Mei, J. Fault detection in an engine by fusion information from multivibration sensors. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Fan, X.F.; Zuo, M.J. Fault diagnosis of machines based on D-S evidence theory. Part 2: Application of the improved D-S evidence theory in gearbox fault diagnosis. Pattern Recognit. Lett. 2006, 27, 377–385. [Google Scholar] [CrossRef]
- Dezert, J. Autonomous navigation with uncertain reference points using the PDAF. In Multitarget-Multisensor Tracking; Bar-Shalom, Y., Ed.; Artech House: Norwood, MA, USA, 2016; Volume 2, pp. 271–327. [Google Scholar]
- Baiocchi, V.; Bianchi, A.; Maddaluno, C.; Vidale, M. Pansharpening techniques to detect mass monument damaging in IRAQ. Int. Arch. Photogr. Remote Sens. Spat. Inf. Sci. 2017, XLII-5/W1, 121–126. [Google Scholar] [CrossRef]
- Merigo, J.M.; Casanovas, M. A New Minkowski Distance Based on Induced Aggregation Operators. Int. J. Comput. Intell. Syst. 2011, 4, 123–133. [Google Scholar] [CrossRef]
- Smets, P. Decision making in the TBM: The necessity of the pignistic transformation. Int. J. Approx. Reason. 2005, 38, 133–147. [Google Scholar] [CrossRef]
- Han, D.Q.; Deng, Y.; Han, C.Z. Some notes on betting commitment distance in evidence theory. Sci. China 2012, 55, 558–565. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Sensors | Propositions | ||
|---|---|---|---|
| A | B | C | |
| 0.90 | 0 | 0.10 | |
| 0.88 | 0.01 | 0.11 | |
| 0.50 | 0.20 | 0.30 | |
| 0.98 | 0.01 | 0.01 | |
| 0.90 | 0.05 | 0.05 | |
| Evidence | Methods | A | B | C | Θ |
|---|---|---|---|---|---|
| DS combination [8] | 0.9863 | 0 | 0.0137 | 0 | |
| Reference [16] | 0.9360 | 0.0008 | 0.0280 | 0.0352 | |
| Reference [17] | 0.9673 | 0.0010 | 0.0317 | 0 | |
| Reference [24] | 0.9673 | 0.0010 | 0.0317 | 0 | |
| Reference [25] | 0.9605 | 0.0011 | 0.0340 | 0.0044 | |
| Proposed | 0.9879 | 0.0004 | 0.0113 | 0.0004 | |
| DS combination [8] | 0.9917 | 0 | 0.0083 | 0.0000 | |
| Reference [16] | 0.6978 | 0.0278 | 0.0708 | 0.2036 | |
| Reference [17] | 0.8525 | 0.0421 | 0.1054 | 0 | |
| Reference [24] | 0.5365 | 0.0246 | 0.0825 | 0.3564 | |
| Reference [25] | 0.6738 | 0.0206 | 0.0883 | 0.2173 | |
| Proposed | 0.9520 | 0.0099 | 0.0318 | 0.0063 | |
| DS combination [8] | 0.9999 | 0 | 0.0001 | 0 | |
| Reference [16] | 0.7454 | 0.0241 | 0.0570 | 0.1735 | |
| Reference [17] | 0.8868 | 0.0337 | 0.0795 | 0 | |
| Reference [24] | 0.5236 | 0.0165 | 0.0606 | 0.3993 | |
| Reference [25] | 0.6671 | 0.0177 | 0.0700 | 0.2452 | |
| Proposed | 0.9736 | 0.0054 | 0.0175 | 0.0035 | |
| DS combination [8] | 1.0000 | 0 | 0 | 0 | |
| Reference [16] | 0.7492 | 0.0260 | 0.0547 | 0.1701 | |
| Reference [17] | 0.8907 | 0.0351 | 0.0742 | 0 | |
| Reference [24] | 0.5799 | 0.0216 | 0.0562 | 0.3423 | |
| Reference [25] | 0.7128 | 0.0236 | 0.0658 | 0.1978 | |
| Proposed | 0.9783 | 0.0050 | 0.0136 | 0.0031 |
| Sensors | Propositions | ||
|---|---|---|---|
| A | B | C | |
| 0.90 | 0 | 0.10 | |
| 0 | 0.01 | 0.99 | |
| 0.50 | 0.20 | 0.30 | |
| 0.98 | 0.01 | 0.01 | |
| 0.90 | 0.05 | 0.05 | |
| Evidence | Methods | A | B | C | Θ |
|---|---|---|---|---|---|
| DS combination [8] | 0 | 0 | 1 | 0 | |
| Reference [16] | 0.1647 | 0.0019 | 0.2984 | 0.5350 | |
| Reference [17] | 0.4055 | 0.0045 | 0.5900 | 0 | |
| Reference [24] | 0.4055 | 0.0045 | 0.5900 | 0 | |
| Reference [25] | 0.4317 | 0.0020 | 0.2841 | 0.2822 | |
| Proposed | 0.3911 | 0.0000 | 0.4262 | 0.1827 | |
| DS combination [8] | 0 | 0 | 1 | 0 | |
| Reference [16] | 0.2232 | 0.0335 | 0.2513 | 0.4920 | |
| Reference [17] | 0.4528 | 0.0679 | 0.4793 | 0 | |
| Reference [24] | 0.3502 | 0.0677 | 0.2850 | 0.2971 | |
| Reference [25] | 0.4276 | 0.0535 | 0.2555 | 0.2634 | |
| Proposed | 0.5363 | 0.0074 | 0.3021 | 0.1542 | |
| DS combination [8] | 0 | 0 | 1 | 0 | |
| Reference [16] | 0.3192 | 0.0295 | 0.1881 | 0.4632 | |
| Reference [17] | 0.5948 | 0.0550 | 0.3502 | 0 | |
| Reference [24] | 0.4446 | 0.0523 | 0.1754 | 0.3277 | |
| Reference [25] | 0.5359 | 0.0427 | 0.1884 | 0.2330 | |
| Proposed | 0.9129 | 0.0076 | 0.0755 | 0.0040 | |
| DS combination [8] | 0 | 0 | 1 | 0 | |
| Reference [16] | 0.3781 | 0.0311 | 0.1671 | 0.4237 | |
| Reference [17] | 0.6560 | 0.0540 | 0.2900 | 0 | |
| Reference [24] | 0.5249 | 0.0503 | 0.1366 | 0.2822 | |
| Reference [25] | 0.6077 | 0.0442 | 0.1606 | 0.1875 | |
| Proposed | 0.9505 | 0.0093 | 0.0340 | 0.0062 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Ye, F.; Jiang, T.; Tian, Y. Conflicting Information Fusion Based on an Improved DS Combination Method. Symmetry 2017, 9, 278. https://doi.org/10.3390/sym9110278
Chen J, Ye F, Jiang T, Tian Y. Conflicting Information Fusion Based on an Improved DS Combination Method. Symmetry. 2017; 9(11):278. https://doi.org/10.3390/sym9110278
Chicago/Turabian StyleChen, Jie, Fang Ye, Tao Jiang, and Yuan Tian. 2017. "Conflicting Information Fusion Based on an Improved DS Combination Method" Symmetry 9, no. 11: 278. https://doi.org/10.3390/sym9110278
APA StyleChen, J., Ye, F., Jiang, T., & Tian, Y. (2017). Conflicting Information Fusion Based on an Improved DS Combination Method. Symmetry, 9(11), 278. https://doi.org/10.3390/sym9110278