
Impact of Structural Compliance of a Six Degree of Freedom Joint Simulator on Virtual Ligament Force Calculation in Total Knee Endoprosthesis Testing
 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Analysis of the Structural Compliance of the VIVO Joint Simulator
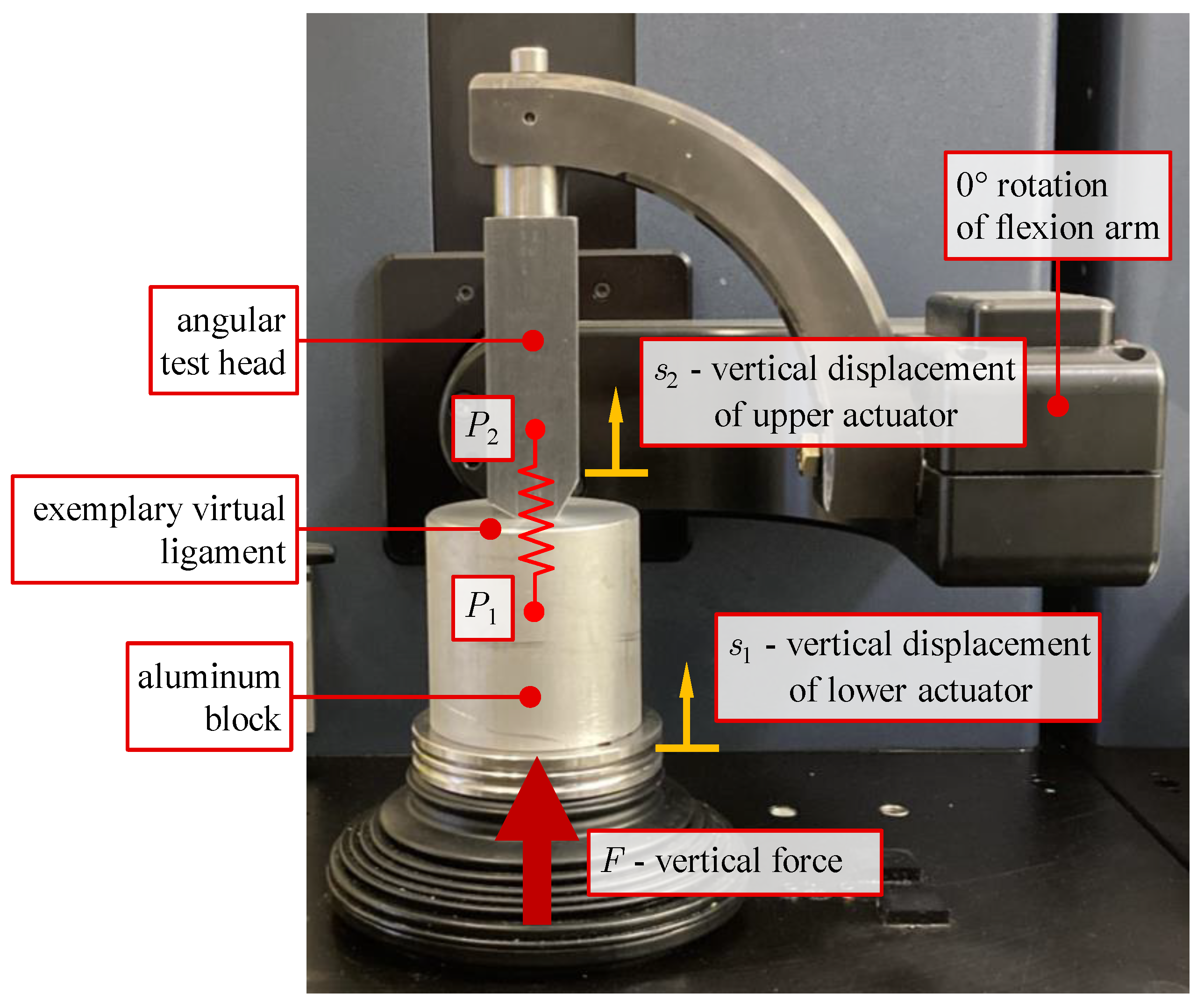
2.1. Material and Methods for Structural Compliance Analysis
2.2. Results of Structural Compliance Analysis
3. Testing of a Total Knee Endoprosthesis on the VIVO Joint Simulator
3.1. Material and Methods for TKR Testing on the VIVO
3.2. Results of TKR Testing on the VIVO
3.2.1. Passive Flexion—Comparison with Multibody Simulation
3.2.2. Passive Flexion—Virtual Resection of PCL
4. Discussion
4.1. Passive Flexion—Comparison of VIVO Experiment with Multibody Simulation (Figure 9)
4.2. Passive Flexion—Virtual Resection of PCL (Figure 10)
5. Limitations of the Present Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zilles, K.; Tillmann, B. Anatomie: Mit 121 Tabellen; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 978-3-540-69481-6. [Google Scholar]
- Głowiński, S.; Krzyżyński, T. An inverse kinematic algorithm for the human leg. J. Theor. Appl. Mech. 2016, 54, 53–61. [Google Scholar] [CrossRef]
- Kebbach, M. Computerbasierte Dynamische Funktionsanalyse des Endoprothetisch Versorgten Humanen Kniegelenks Mittels Muskuloskelettaler Mehrkörpersimulation; Dr. Hut: München, Germany, 2023; ISBN 9783843953603. [Google Scholar]
- Maag, C.; Cracaoanu, I.; Langhorn, J.; Heldreth, M. Total knee replacement wear during simulated gait with mechanical and anatomic alignments. Proc. Inst. Mech. Eng. H 2021, 235, 515–522. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, A.; Yamomo, G.; Willing, R.; Towfighian, S. Parametric Study of a Triboelectric Transducer in Total Knee Replacement Application. J. Intell. Mater. Syst. Struct. 2021, 32, 16–28. [Google Scholar] [CrossRef] [PubMed]
- Hossain, N.A.; Yamomo, G.G.; Willing, R.; Towfighian, S. Characterization of a packaged triboelectric harvester under simulated gait loading for total knee replacement. IEEE ASME Trans. Mechatron. 2021, 26, 2967–2976. [Google Scholar] [CrossRef] [PubMed]
- Fitzpatrick, C.K.; Maag, C.; Clary, C.W.; Metcalfe, A.; Langhorn, J.; Rullkoetter, P.J. Validation of a new computational 6-DOF knee simulator during dynamic activities. J. Biomech. 2016, 49, 3177–3184. [Google Scholar] [CrossRef] [PubMed]
- Sekeitto, A.R.; McGale, J.G.; Montgomery, L.A.; Vasarhelyi, E.M.; Willing, R.; Lanting, B.A. Posterior-stabilized total knee arthroplasty kinematics and joint laxity: A hybrid biomechanical study. Arthroplasty 2022, 4, 53. [Google Scholar] [CrossRef] [PubMed]
- Willing, R.; Walker, P.S. Measuring the sensitivity of total knee replacement kinematics and laxity to soft tissue imbalances. J. Biomech. 2018, 77, 62–68. [Google Scholar] [CrossRef] [PubMed]
- Willing, R.; Moslemian, A.; Yamomo, G.; Wood, T.; Howard, J.; Lanting, B. Condylar-Stabilized TKR May Not Fully Compensate for PCL-Deficiency: An In Vitro Cadaver Study. J. Orthop. Res. 2019, 37, 2172–2181. [Google Scholar] [CrossRef] [PubMed]
- Behnam, Y.A.; Anantha Krishnan, A.; Wilson, H.; Clary, C.W. Simultaneous Evaluation of Tibiofemoral and Patellofemoral Mechanics in Total Knee Arthroplasty: A Combined Experimental and Computational Approach. J. Biomech. Eng. 2024, 146, 011007. [Google Scholar] [CrossRef] [PubMed]
- Moslemian, A.; Arakgi, M.E.; Roessler, P.P.; Sidhu, R.S.; Degen, R.M.; Willing, R.; Getgood, A.M.J. The Medial structures of the knee have a significant contribution to posteromedial rotational laxity control in the PCL-deficient knee. Knee Surg. Sports Traumatol. Arthrosc. 2021, 29, 4172–4181. [Google Scholar] [CrossRef] [PubMed]
- Andreassen, T.E.; Hamilton, L.D.; Hume, D.; Higinbotham, S.E.; Behnam, Y.; Clary, C.; Shelburne, K.B. Apparatus for In Vivo Knee Laxity Assessment Using High-Speed Stereo Radiography. J. Med. Device. 2021, 15, 41004. [Google Scholar] [CrossRef] [PubMed]
- Sidhu, S.P.; Moslemian, A.; Yamomo, G.; Vakili, S.; Kelly, P.; Willing, R.T.; Lanting, B.A. Lateral subvastus lateralis versus medial parapatellar approach for total knee arthroplasty: A cadaveric biomechanical study. Knee 2020, 27, 1735–1745. [Google Scholar] [CrossRef] [PubMed]
- Grawe, R. Roboterbasierter Hardware-in-the-Loop-Simulator für die Untersuchung der Dynamik von Totalendoprothesen; Universität Rostock: Rostock, Germany, 2022. [Google Scholar]
- Clarke, I.C. Wear of Artificial Joint Materials IV. Eng. Med. 1981, 10, 189–198. [Google Scholar] [CrossRef]
- AMTI—Advanced Mechanical Technology Inc. Vivo Control Software Technical Reference Manual; AMTI: Watertown, MA, USA, 2015. [Google Scholar]
- Henke, P.; Ruehrmund, L.; Bader, R.; Kebbach, M. Exploration of the Advanced VIVOTM Joint Simulator: An In-Depth Analysis of Opportunities and Limitations Demonstrated by the Artificial Knee Joint. Bioengineering 2024, 11, 178. [Google Scholar] [CrossRef] [PubMed]
- Wismans, J.J. A Three-Dimensional Mathematical Model of the Human Knee Joint; Technische Hogeschool Eindhoven: Eindhoven, Netherlands, 1980. [Google Scholar] [CrossRef]
- D’Lima, D.D.; Fregly, B.J.; Patil, S.; Steklov, N.; Colwell, C.W. Knee joint forces: Prediction, measurement, and significance. Proc. Inst. Mech. Eng. H 2012, 226, 95–102. [Google Scholar] [CrossRef] [PubMed]
- Kebbach, M.; Grawe, R.; Geier, A.; Winter, E.; Bergschmidt, P.; Kluess, D.; D’Lima, D.; Woernle, C.; Bader, R. Effect of surgical parameters on the biomechanical behaviour of bicondylar total knee endoprostheses—A robot-assisted test method based on a musculoskeletal model. Sci. Rep. 2019, 9, 14504. [Google Scholar] [CrossRef] [PubMed]
- Most, E.; Zayontz, S.; Li, G.; Otterberg, E.; Sabbag, K.; Rubash, H.E. Femoral rollback after cruciate-retaining and stabilizing total knee arthroplasty. Clin. Orthop. Relat. Res. 2003, 410, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Kayani, B.; Konan, S.; Horriat, S.; Ibrahim, M.S.; Haddad, F.S. Posterior cruciate ligament resection in total knee arthroplasty: The effect on flexion-extension gaps, mediolateral laxity, and fixed flexion deformity. Bone Jt. J. 2019, 101-B, 1230–1237. [Google Scholar] [CrossRef]
- Warth, L.C.; Deckard, E.R.; Meneghini, R.M. Posterior Cruciate Ligament Resection Does Not Consistently Increase the Flexion Space in Contemporary Total Knee Arthroplasty. J. Arthroplast. 2021, 36, 963–969. [Google Scholar] [CrossRef] [PubMed]
- Chaiyakit, P.; Dokkhum, P. Posterior Cruciate Ligament Resection and Varus Correction in Total Knee Arthroplasty: A Study Using Computer-Assisted Surgery. Arthroplast. Today 2022, 13, 176–180. [Google Scholar] [CrossRef] [PubMed]
- Hippmann, G. An Algorithm for Compliant Contact Between Complexly Shaped Bodies. Multibody Syst. Dyn. 2004, 12, 345–362. [Google Scholar] [CrossRef]
- Schünke, M.; Schulte, E.; Schumacher, U.; Voll, M.; Wesker, K.H. PROMETHEUS Allgemeine Anatomie und Bewegungssystem; Georg Thieme Verlag: Stuttgart, Germany, 2018; ISBN 9783132420830. [Google Scholar]
- Zelle, J.; Heesterbeek, P.J.C.; de Waal Malefijt, M.; Verdonschot, N. Numerical analysis of variations in posterior cruciate ligament properties and balancing techniques on total knee arthroplasty loading. Med. Eng. Phys. 2010, 32, 700–707. [Google Scholar] [CrossRef] [PubMed]
- Shoifi Abubakar, M.; Nakamura, S.; Kuriyama, S.; Ito, H.; Ishikawa, M.; Furu, M.; Tanaka, Y.; Matsuda, S. Influence of Posterior Cruciate Ligament Tension on Knee Kinematics and Kinetics. J. Knee Surg. 2016, 29, 684–689. [Google Scholar] [CrossRef] [PubMed]
- Murphy, D.P.; Webster, J.B. (Eds.) Atlas of Orthoses and Assistive Devices, 5th ed.; Elsevier: Philadelphia, PA, USA, 2019; ISBN 978-0-323-48323-0. [Google Scholar]
- Hulleck, A.A.; Menoth Mohan, D.; Abdallah, N.; El Rich, M.; Khalaf, K. Present and future of gait assessment in clinical practice: Towards the application of novel trends and technologies. Front. Med. Technol. 2022, 4, 901331. [Google Scholar] [CrossRef] [PubMed]
- Tischer, T.; Geier, A.; Lutter, C.; Enz, A.; Bader, R.; Kebbach, M. Patella height influences patellofemoral contact and kinematics following cruciate-retaining total knee replacement. J. Orthop. Res. 2023, 41, 793–802. [Google Scholar] [CrossRef] [PubMed]
- Montgomery, L.; McGale, J.; Lanting, B.; Willing, R. Biomechanical analysis of ligament modelling techniques in TKA knees during laxity tests using a virtual joint motion simulator. Comput. Methods Biomech. Biomed. Eng. 2023, 1–13. [Google Scholar] [CrossRef]
- Bortel, E.; Charbonnier, B.; Heuberger, R. Development of a Synthetic Synovial Fluid for Tribological Testing. Lubricants 2015, 3, 664–686. [Google Scholar] [CrossRef]
- Bingöl, A.Ö.; Lohmann, D.; Püschel, K.; Kulicke, W.-M. Characterization and comparison of shear and extensional flow of sodium hyaluronate and human synovial fluid. Biorheology 2010, 47, 205–224. [Google Scholar] [CrossRef] [PubMed]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kleist, E.; Henke, P.; Ruehrmund, L.; Kebbach, M.; Bader, R.; Woernle, C. Impact of Structural Compliance of a Six Degree of Freedom Joint Simulator on Virtual Ligament Force Calculation in Total Knee Endoprosthesis Testing. Life 2024, 14, 531. https://doi.org/10.3390/life14040531
Kleist E, Henke P, Ruehrmund L, Kebbach M, Bader R, Woernle C. Impact of Structural Compliance of a Six Degree of Freedom Joint Simulator on Virtual Ligament Force Calculation in Total Knee Endoprosthesis Testing. Life. 2024; 14(4):531. https://doi.org/10.3390/life14040531
Chicago/Turabian StyleKleist, Eric, Paul Henke, Leo Ruehrmund, Maeruan Kebbach, Rainer Bader, and Christoph Woernle. 2024. "Impact of Structural Compliance of a Six Degree of Freedom Joint Simulator on Virtual Ligament Force Calculation in Total Knee Endoprosthesis Testing" Life 14, no. 4: 531. https://doi.org/10.3390/life14040531