
Evaluation of Moisture-Induced Stresses in Wood Cross-Sections Determined with a Time-Dependent, Plastic Material Model during Long-Time Exposure
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Hygrothermal Multi-Fickian Transport Model
2.2. Rheological Model for Wood
2.2.1. Elastic Strain
2.2.2. Hygroscopic Expansion
2.2.3. Irrecoverable Mechanosorption
2.2.4. Viscoelasticity
2.2.5. Mechanosorption
2.2.6. Multisurface Plasticity—Return-Mapping Algorithm
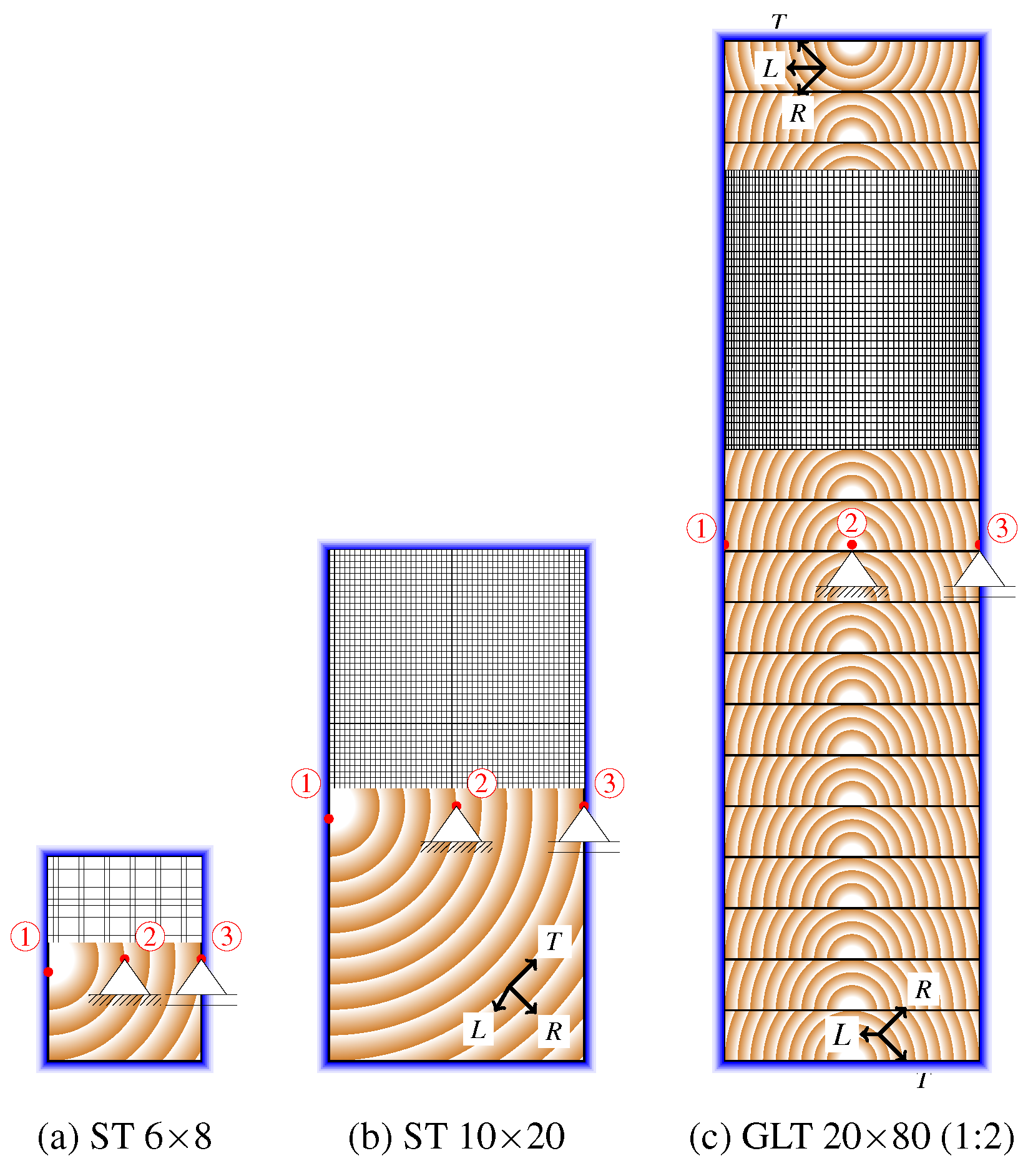
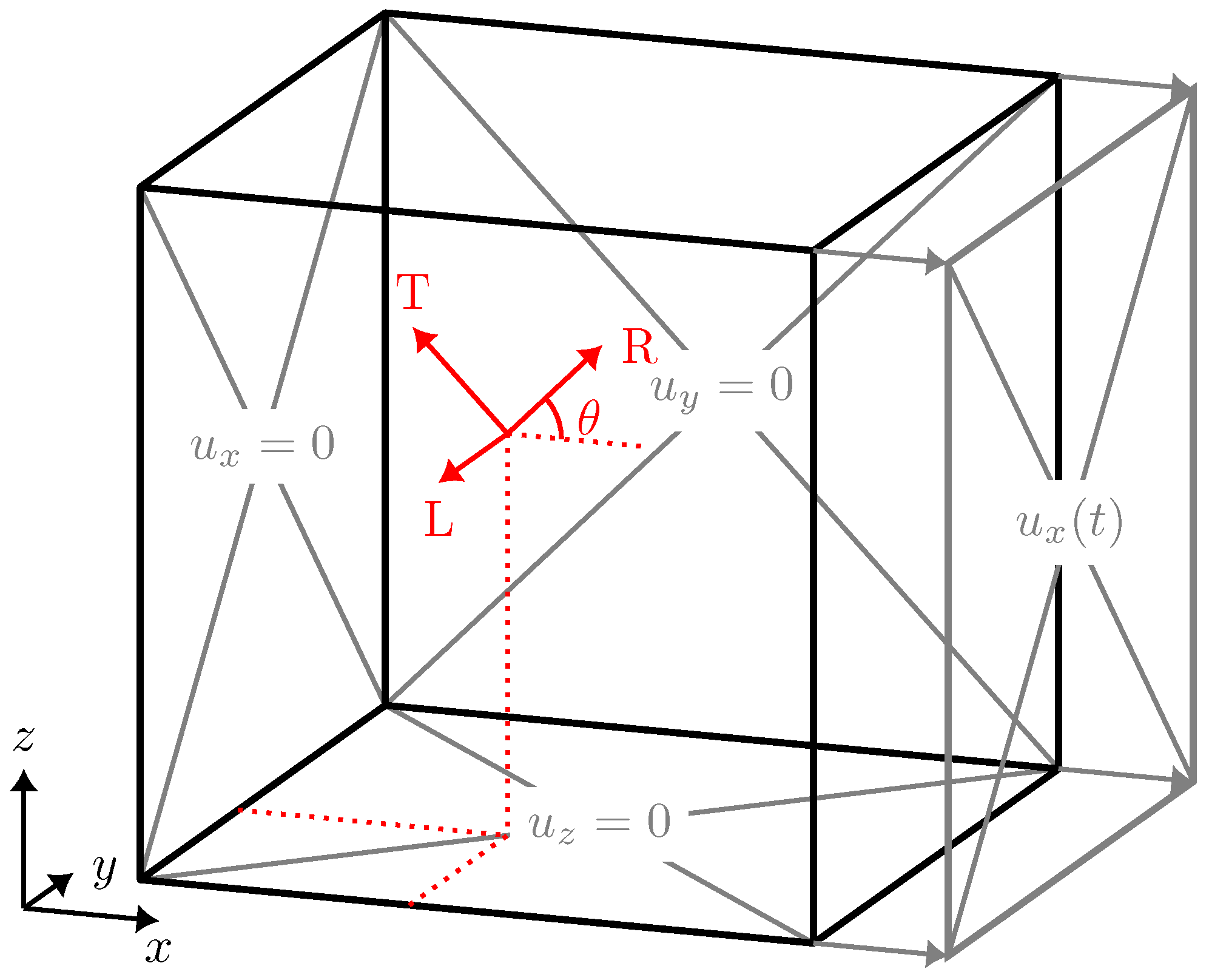
2.3. Geometries, Initial and Boundary Conditions
3. Results and Discussion
3.1. Performance of the Mechanical Material Model
3.2. Effect of Uniform Moisture Field Variations
- The presented rheological model;
- The presented rheological model without irrecoverable mechanosorption;
- A material model not considering viscoelasticity and mechanosorption and;
- A material model not considering viscoelasticity and mechanosorption, with a constant compliance tensor.
3.3. Effect with Non-Uniform Moisture Field Variations
3.4. Effects under Realistic Long-Term Loading
4. Conclusions
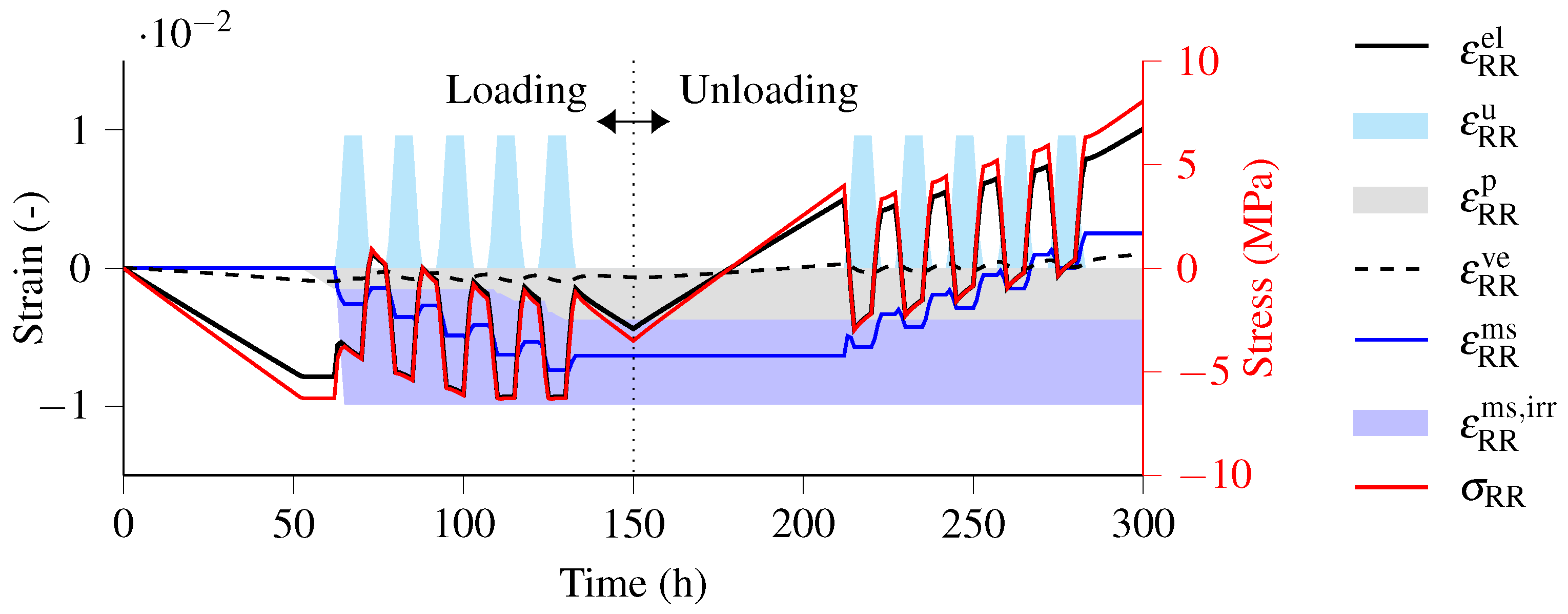
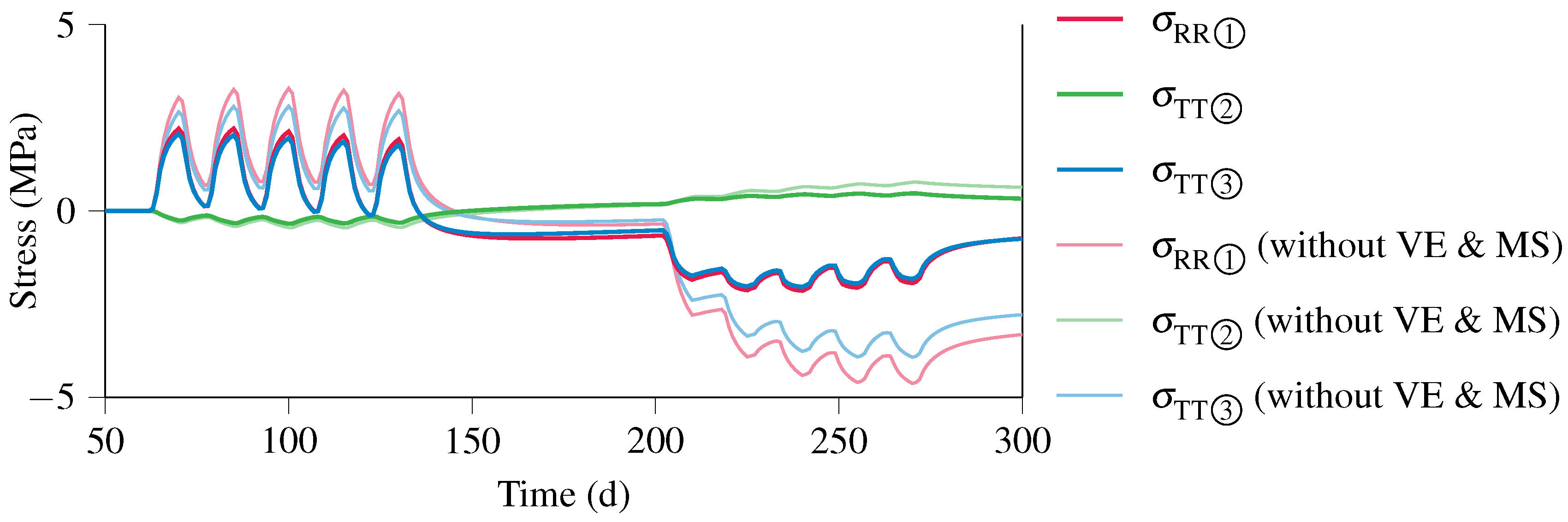
- A moisture-dependent compliance tensor results in smaller absolute stresses during wetting periods and larger absolute stresses during drying periods, as compared to a constant stiffness tensor (Figure 4).
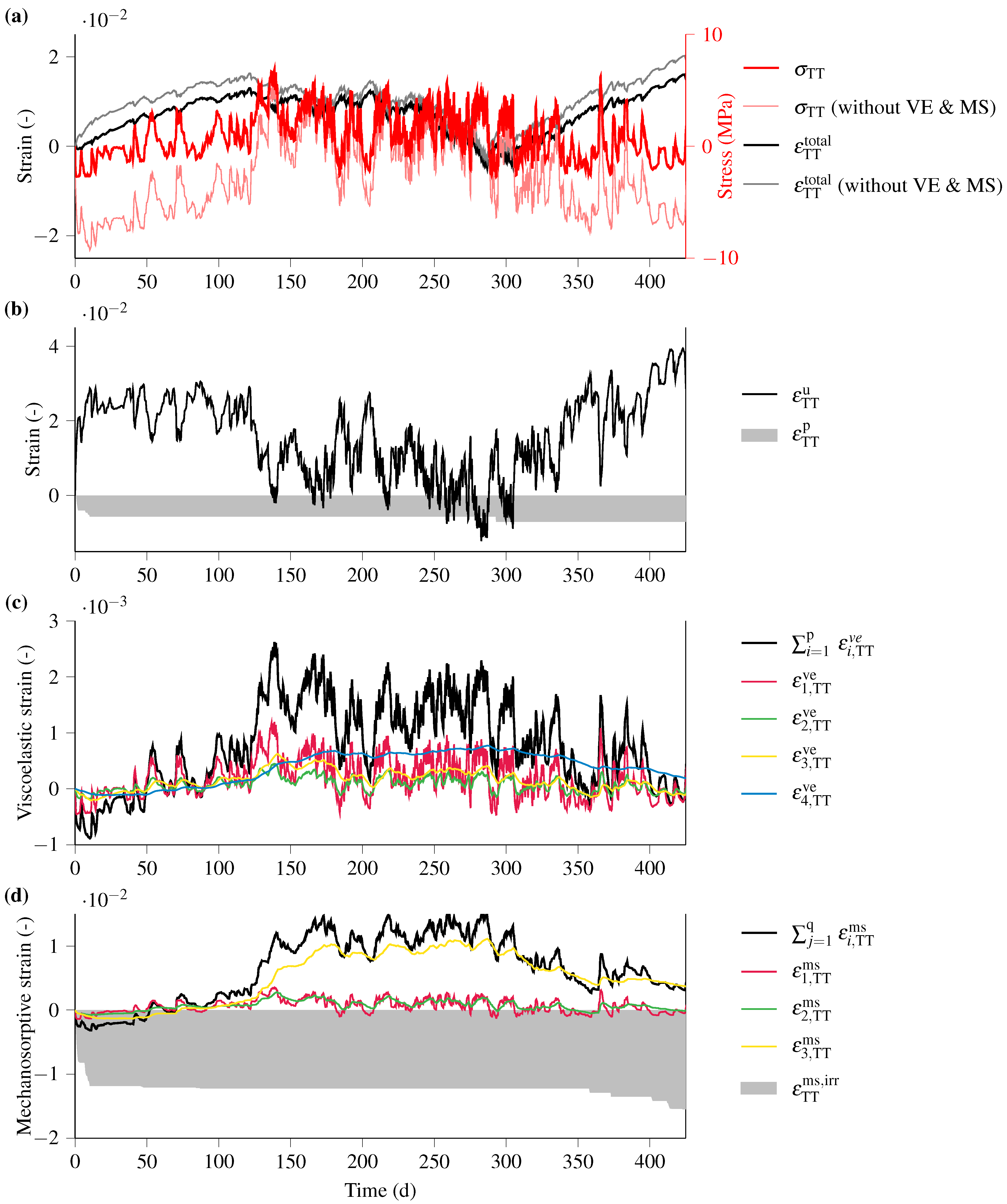
- The irrecoverable part of mechanosorption increases only during wetting periods, which are accompanied by compression, e.g., in the boundary region of the cross-section. During wetting periods, therefore, mechanosorption and irrecoverable mechanosorption add up. However, during drying periods, mechanosorption develops in the opposite direction, up to a value close to the irrecoverable mechanosorption, thus, significantly reducing the total mechanosorptive strains (Figure 5).
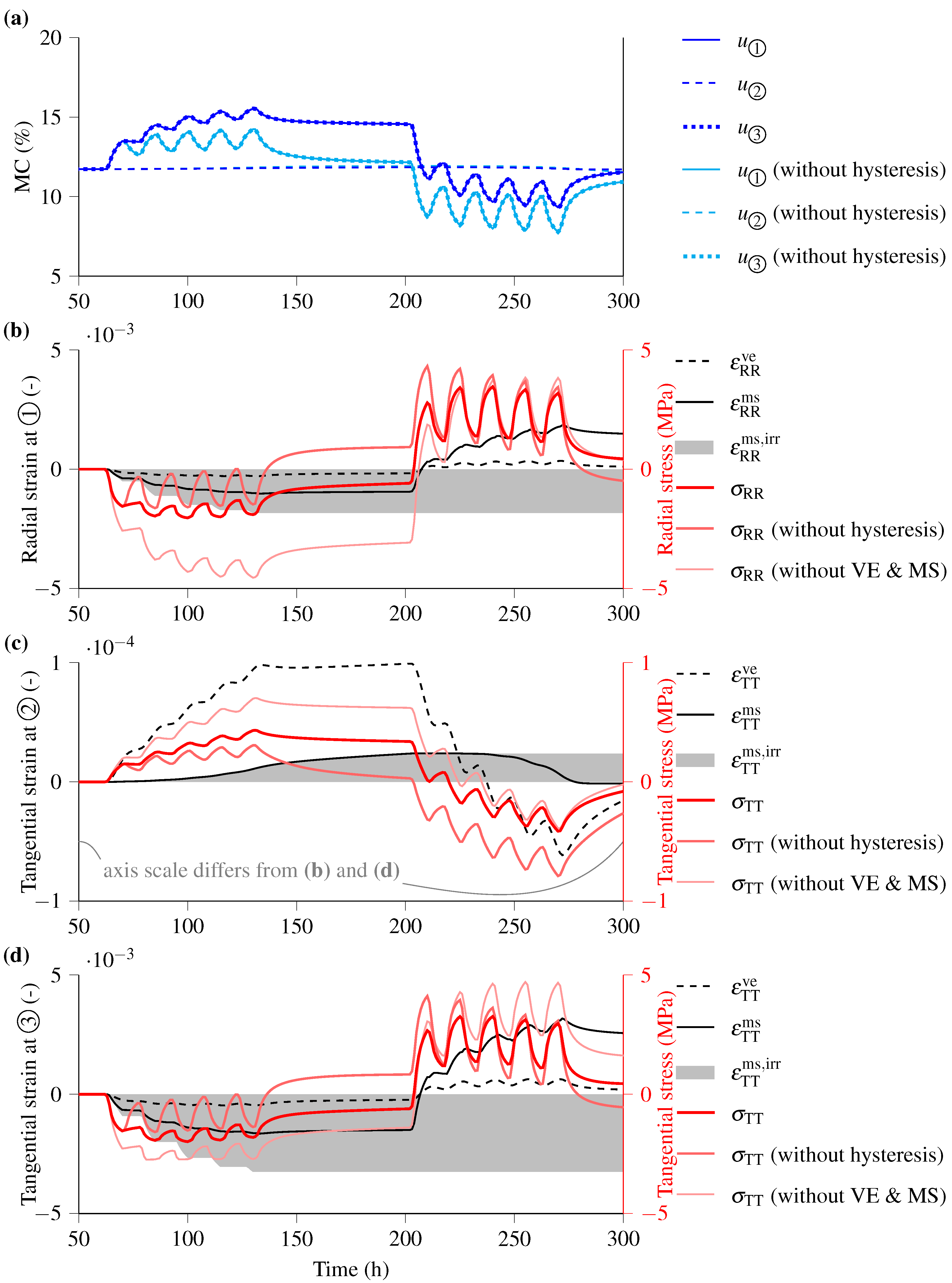
- The consideration of realistic sorption hysteresis affects the moisture content field and, consequently, the stresses under changing climatic conditions. This leads to a step-wise increase in moisture content under cyclic humidity changes, thus resulting in larger moisture-induced loading (Figure 5).
- During a 14-month climatic cycle, the resulting stresses were found to be significantly more affected during the wetting period (with moisture content being greater at the edge than in the center) than during the drying period.
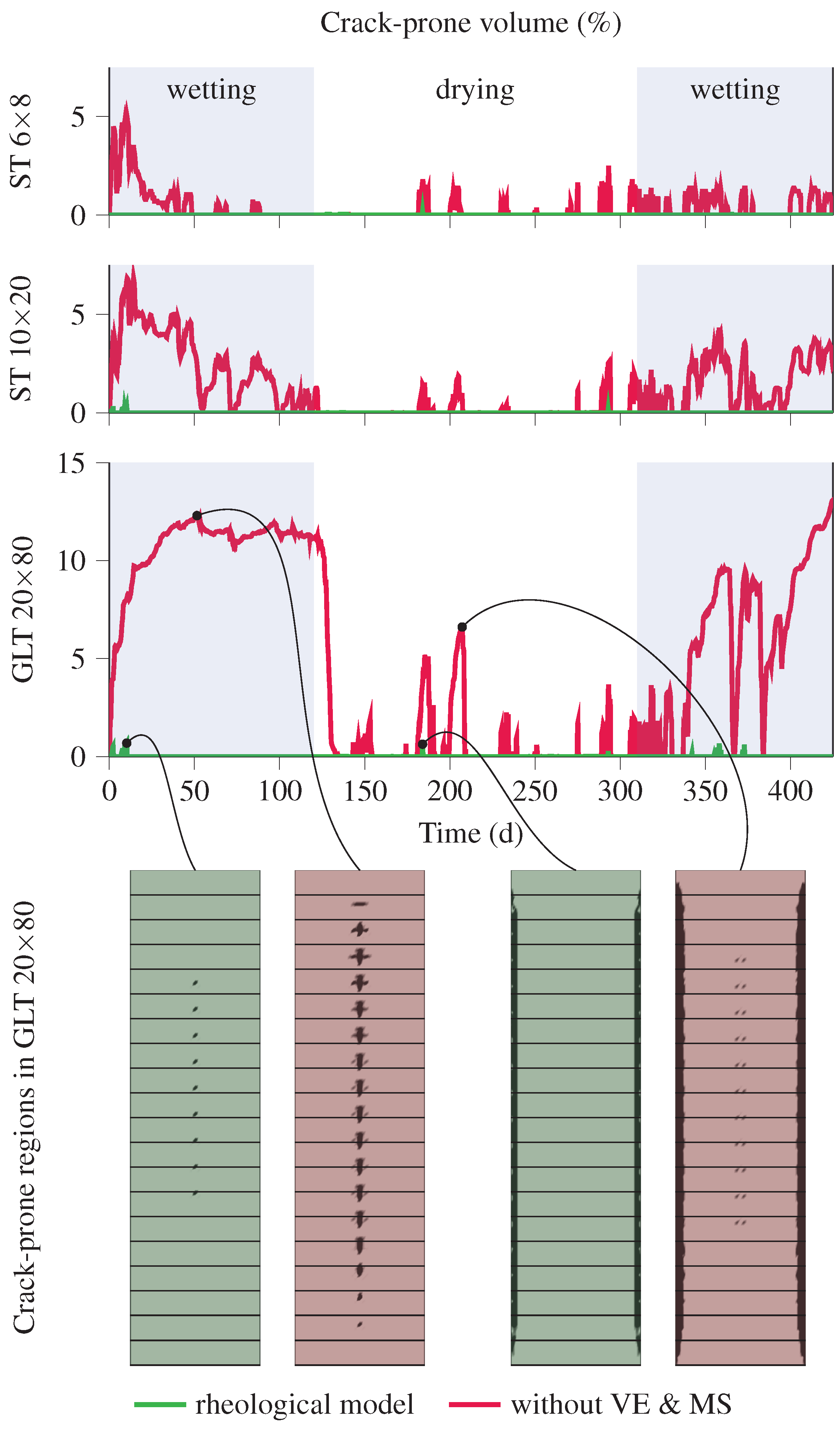
- During the wetting period, stress relaxation at the edge of the cross-section reduces the stress levels in the center of the cross-section, bringing them below the threshold where cracks could potentially form. This finding validates the empirical understanding that cracks are more likely to occur on the surface under drying conditions, rather than inside a cross-section due to wetting.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MC | Moisture content |
| GLT | Glued laminated timber |
| FSP | Fiber saturation point |
| ST | Solid timber |
Appendix A
Appendix A.1. Algorithm and Implementation of the Rheological Material Model
- Compute the strains and the MC at the end of the increment.
- Initialize the strain components of each additively combined viscoelastic element i and each mechanosorptive Kelvin–Voigt element j, as well as the irrecoverable mechanosorptive strain and plastic strains with the last increment’s values (initial values for the first increment are set to 0).
- Determine the hygroexpansion (Equation (6)) and irrecoverable mechanosorptive strain (Equation (7)).
- Determine the compliance tensor (Equation (3)).
- Begin loop, set
- (a)
- Determine and using the return-mapping algorithm.
- (b)
- Determine ((Equation (2))
- (c)
- Determine total algorithmic tangent operator:
- (d)
- Determine residual vectors (Equation (A1)), and their sum
- (e)
- Compute the change of the total stress
- (f)
- Recompute the strain components of each additively combined viscoelastic element i and each mechanosorptive Kelvin-Voigt element j.
- (g)
- Recompute (based on Equation (A1))
- (h)
- If fulfills the convergence criterion exit the loop, otherwise set and go to (a).
- Store final values of , , , .
Appendix A.2. Residuals
References
- Dietsch, P.; Gamper, A.; Merk, M.; Winter, S. Monitoring Building Climate and Timber Moisture Gradient in Large-Span Timber Structures. J. Civil Struct. Health Monit. 2015, 5, 153–165. [Google Scholar] [CrossRef]
- Yu, T.; Khaloian, A.; van de Kuilen, J.W. An improved model for the time-dependent material response of wood under mechanical loading and varying humidity conditions. Eng. Struct. 2022, 259, 114116. [Google Scholar] [CrossRef]
- Hanhijärvi, A.; Mackenzie-Helnwein, P. Computational Analysis of Quality Reduction during Drying of Lumber due to Irrecoverable Deformation. I: Orthotropic Viscoelastic-Mechanosorptive-Plastic Material Model for the Transverse Plane of Wood. J. Eng. Mech. 2003, 129, 996–1005. [Google Scholar] [CrossRef]
- Toratti, T.; Svensson, S. Mechano-sorptive experiments perpendicular to grain under tensile and compressive loads. Wood Sci. Technol. 2000, 34, 317–326. [Google Scholar] [CrossRef]
- Svensson, S.; Toratti, T. Mechanical response of wood perpendicular to grain when subjected to changes of humidity. Wood Sci. Technol. 2002, 36, 145–156. [Google Scholar] [CrossRef]
- Fortino, S.; Mirianon, F.; Toratti, T. A 3D moisture-stress FEM analysis for time dependent problems in timber structures. Mech. Time-Depend. Mater. 2009, 13, 333. [Google Scholar] [CrossRef]
- Reichel, S.; Kaliske, M. Hygro-mechanically coupled modelling of creep in wooden structures, Part I: Mechanics. Int. J. Solids Struct. 2015, 77, 28–44. [Google Scholar] [CrossRef]
- Santaoja, K.; Leino, T.; Ranta-Maunus, A.; Hanhijärvi, A. Mechano-Sorptive Structural Analysis of Wood by the ABAQUS Finite Element Program; Number 1276 in Valtion Teknillinen Tutkimuskeskus; Tiedotteita, VTT Technical Research Centre of Finland: Espoo, Finland, 1991. [Google Scholar] [CrossRef]
- Ranta-Maunus, A. Impact of mechano-sorptive creep to the long-term strength of timber. Holz Roh Werkst. 1990, 48, 67–71. [Google Scholar] [CrossRef]
- Leicester, R.H. A Rheological Model for Mechano-Sorptive Deflections of Beams. Wood Sci. Technol. 1971, 5, 211–220. [Google Scholar] [CrossRef]
- Salin, J.G. Numerical Prediction of Checking during Timber Drying and a New Mechano-Sorptive Creep Model. Holz Roh-und Werkst. 1992, 50, 195–200. [Google Scholar] [CrossRef]
- Mackenzie-Helnwein, P.; Hanhijärvi, A. Computational Analysis of Quality Reduction during Drying of Lumber due to Irrecoverable Deformation. II: Algorithmic Aspects and Practical Application. J. Eng. Mech. 2003, 129, 1006–1016. [Google Scholar] [CrossRef]
- Reichel, S.; Kaliske, M. Hygro-mechanically coupled modelling of creep in wooden structures, Part II: Influence of moisture content. Int. J. Solids Struct. 2015, 77, 45–64. [Google Scholar] [CrossRef]
- Fortino, S.; Hradil, P.; Metelli, G. Moisture-induced stresses in large glulam beams. Case study: Vihantasalmi Bridge. Wood Mater. Sci. Eng. 2019, 14, 366–380. [Google Scholar] [CrossRef]
- Hassani, M.M.; Wittel, F.K.; Hering, S.; Herrmann, H.J. Rheological model for wood. Comput. Methods Appl. Mech. Eng. 2015, 283, 1032–1060. [Google Scholar] [CrossRef]
- Frandsen, H.L. Selected Constitutive Models for Simulating the Hygromechanical Response of Wood. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2007. [Google Scholar]
- Schniewind, A.P.; Barrett, J.D. Wood as a Linear Orthotropic Viscoelastic Material. Wood Sci. Technol. 1972, 6, 43–57. [Google Scholar] [CrossRef]
- Huč, S.; Svensson, S. Influence of Grain Direction on the Time-Dependent Behavior of Wood Analyzed by a 3D Rheological Model. A Mathematical Consideration. Holzforschung 2018, 72, 889–897. [Google Scholar] [CrossRef]
- Huč, S.; Svensson, S.; Hozjan, T. Hygro-Mechanical Analysis of Wood Subjected to Constant Mechanical Load and Varying Relative Humidity. Holzforschung 2018, 72, 863–870. [Google Scholar] [CrossRef]
- Huč, S.; Svensson, S.; Hozjan, T. Numerical Analysis of Moisture-Induced Strains and Stresses in Glued-Laminated Timber. Holzforschung 2020, 74, 445–457. [Google Scholar] [CrossRef]
- Autengruber, M.; Lukacevic, M.; Gröstlinger, C.; Eberhardsteiner, J.; Füssl, J. Numerical assessment of wood moisture content-based assignments to service classes in EC5 and a prediction concept for moisture-induced stresses solely using relative humidity data. Eng. Struct. 2021, 245, 112849. [Google Scholar] [CrossRef]
- Autengruber, M.; Lukacevic, M.; Füssl, J. Finite-element-based moisture transport model for wood including free water above the fiber saturation point. Int. J. Heat Mass Tran. 2020, 161, 120228. [Google Scholar] [CrossRef]
- Autengruber, M.; Lukacevic, M.; Gröstlinger, C.; Füssl, J. Finite-element-based prediction of moisture-induced crack patterns for cross sections of solid wood and glued laminated timber exposed to a realistic climate condition. Constr. Build. Mater. 2021, 271, 121775. [Google Scholar] [CrossRef]
- Pech, S.; Lukacevic, M.; Füssl, J. A robust multisurface return-mapping algorithm and its implementation in Abaqus. Finite Elem. Anal. Des. 2021, 190, 103531. [Google Scholar] [CrossRef]
- Lukacevic, M.; Füssl, J.; Lampert, R. Failure mechanisms of clear wood identified at wood cell level by an approach based on the extended finite element method. Eng. Fract. Mech. 2015, 144, 158–175. [Google Scholar] [CrossRef]
- Lukacevic, M.; Lederer, W.; Füssl, J. A microstructure-based multisurface failure criterion for the description of brittle and ductile failure mechanisms of clear-wood. Eng. Fract. Mech. 2017, 176, 83–99. [Google Scholar] [CrossRef]
- Krabbenhøft, K.; Damkilde, L. A model for non-Fickian moisture transfer in wood. Mater. Struct. 2004, 37, 615–622. [Google Scholar] [CrossRef]
- Frandsen, H.L.; Damkilde, L.; Svensson, S. A revised multi-Fickian moisture transport model to describe non-Fickian effects in wood. Holzforschung 2007, 61, 563–572. [Google Scholar] [CrossRef]
- Frandsen, H.L.; Damkilde, L.; Svensson, S. A hysteresis model suitable for numerical simulation of moisture content in wood. Holzforschung 2007, 61, 175–181. [Google Scholar] [CrossRef]
- Frandsen, H.L.; Damkilde, L.; Svensson, S. Implementation of sorption hysteresis in multi-Fickian moisture transport. Holzforschung 2007, 61, 693–701. [Google Scholar] [CrossRef]
- O’Ceallaigh, C.; Sikora, K.; McPolin, D.; Harte, A.M. Modelling the hygro-mechanical creep behaviour of FRP reinforced timber elements. Constr. Build. Mater. 2020, 259, 119899. [Google Scholar] [CrossRef]
- Tsai, S.W.; Wu, E.M. A General Theory of Strength for Anisotropic Materials. J. Compos. Mater. 1971, 5, 58–80. [Google Scholar] [CrossRef]
- Simo, J.C.; Hughes, T.J. Computational Inelasticity; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1998; Volume 7. [Google Scholar] [CrossRef]
- Brandstätter, F.; Autengruber, M.; Lukacevic, M.; Füssl, J. Prediction of Moisture-Induced Cracks in Wooden Cross Sections Using Finite Element Simulations. Wood Sci. Technol. 2023, 57, 671–701. [Google Scholar] [CrossRef] [PubMed]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pech, S.; Autengruber, M.; Lukacevic, M.; Lackner, R.; Füssl, J. Evaluation of Moisture-Induced Stresses in Wood Cross-Sections Determined with a Time-Dependent, Plastic Material Model during Long-Time Exposure. Buildings 2024, 14, 937. https://doi.org/10.3390/buildings14040937
Pech S, Autengruber M, Lukacevic M, Lackner R, Füssl J. Evaluation of Moisture-Induced Stresses in Wood Cross-Sections Determined with a Time-Dependent, Plastic Material Model during Long-Time Exposure. Buildings. 2024; 14(4):937. https://doi.org/10.3390/buildings14040937
Chicago/Turabian StylePech, Sebastian, Maximilian Autengruber, Markus Lukacevic, Roman Lackner, and Josef Füssl. 2024. "Evaluation of Moisture-Induced Stresses in Wood Cross-Sections Determined with a Time-Dependent, Plastic Material Model during Long-Time Exposure" Buildings 14, no. 4: 937. https://doi.org/10.3390/buildings14040937