
Multi-Source Data Fusion Method for the Truss Structure Stability Measurement of Space Telescope

 ,
,
Abstract
:1. Introduction
2. Measurement Model
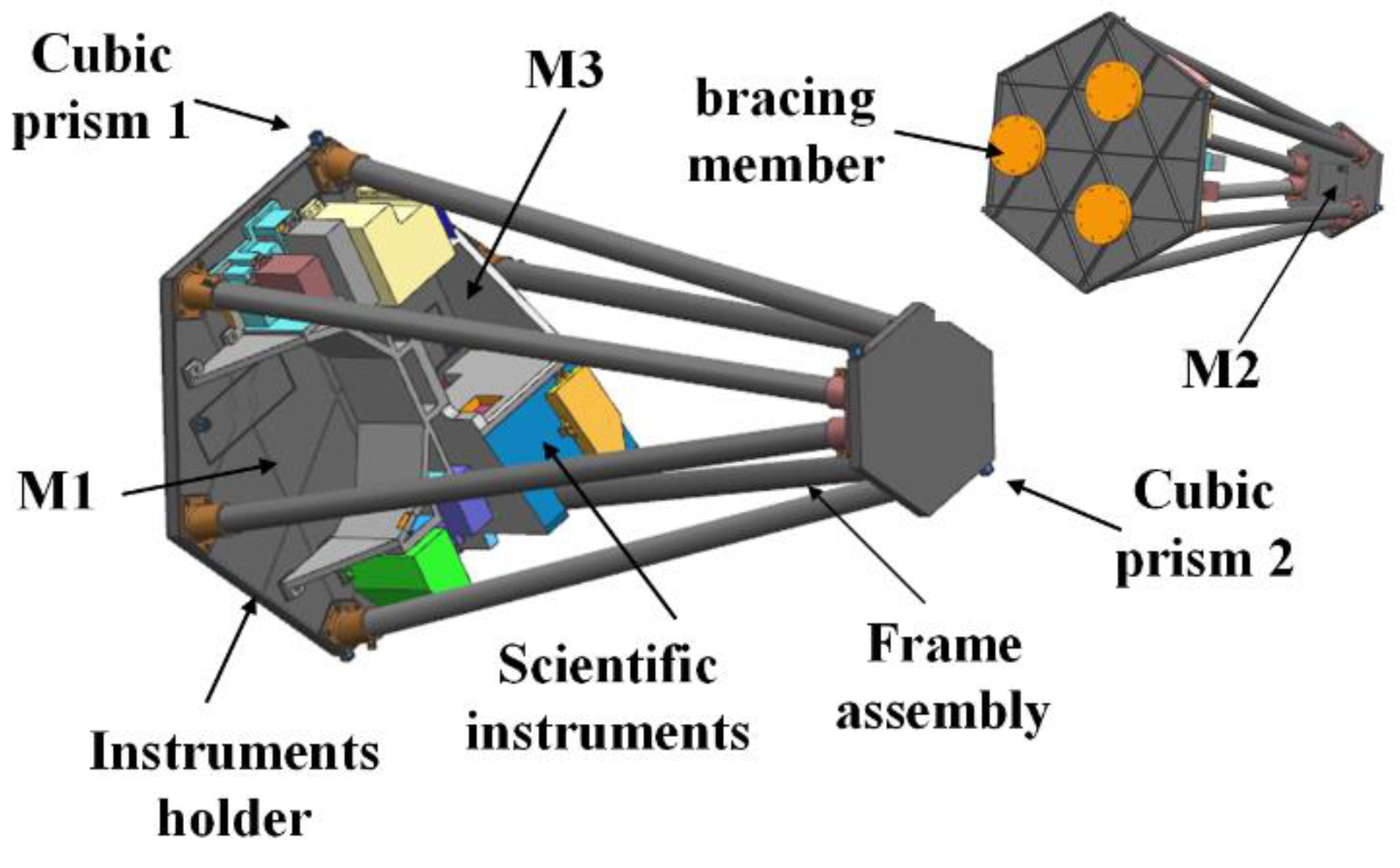
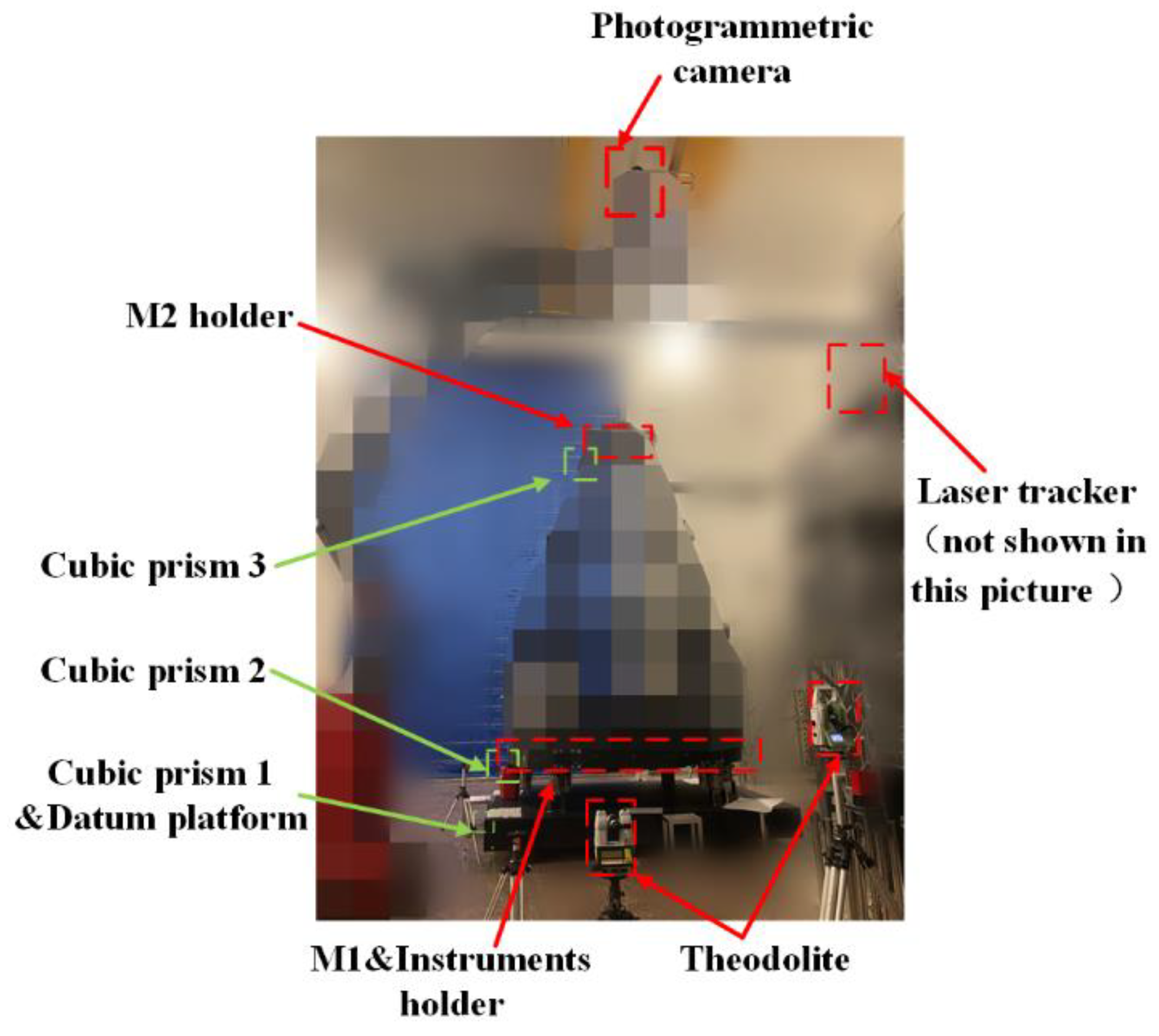
2.1. Test Subject Overview
2.2. Analysis of Measurement Requirement
3. Datum Transfer
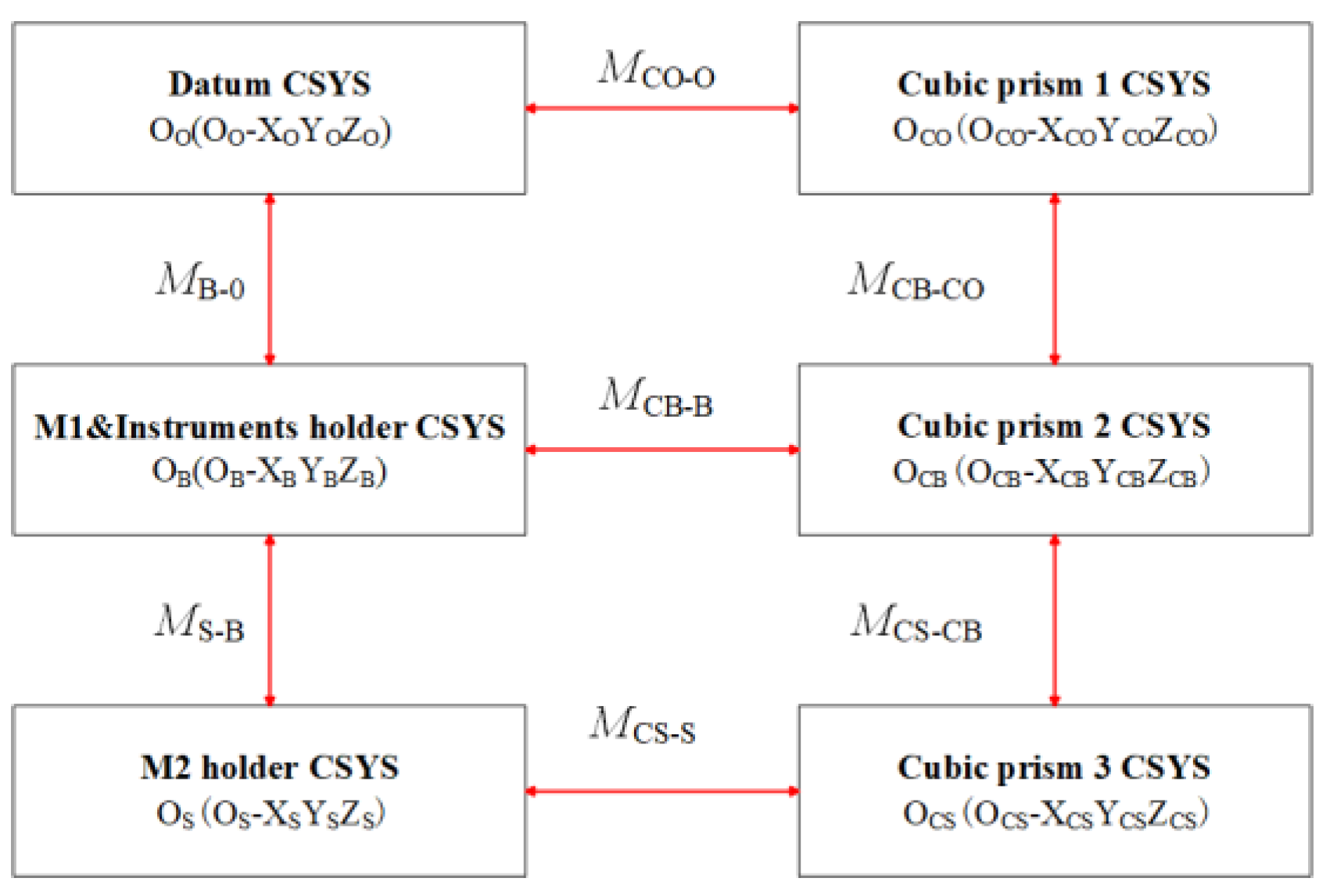
3.1. Systematic Coordinate System
3.2. Transformation Matrix
3.3. Multi-Source Data Datum Alignment
4. Error Simulation and Analysis
4.1. Cubic Prism Coordinate System Error
4.2. Datum Alignment Error
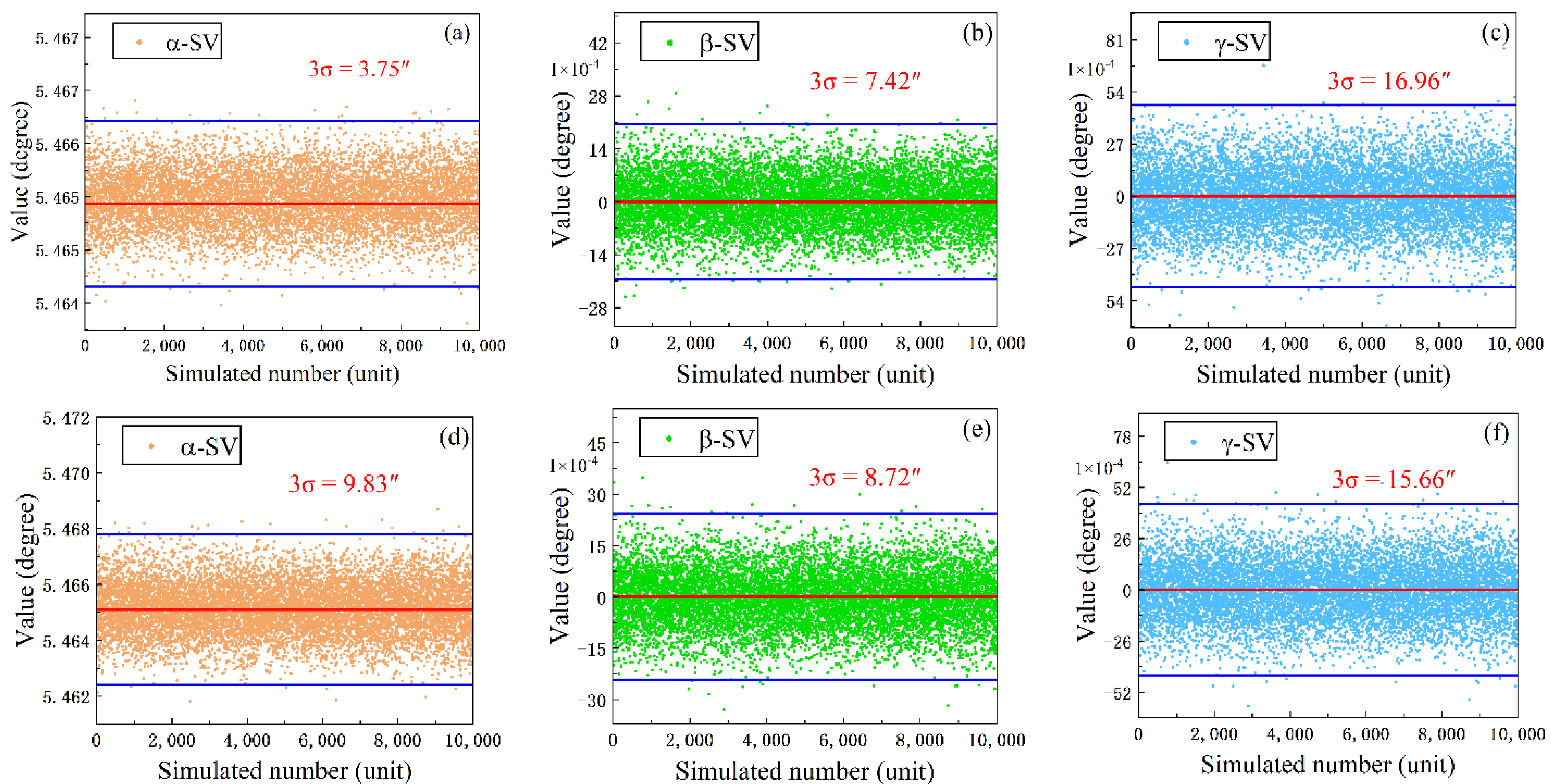
4.3. Datum Transfer Error
- (1)
- Set the simulation model parameters as the theoretical values for the simulation scenario, including mechanical feature points, the azimuth of the M1&Instruments holder to the M2 holder, and the mounting error of each component.
- (2)
- Calculation of the theoretical values of the attitude angles of the M1&Instruments holder and the M2 holder according to the theoretical parameters of the simulation set in step (1), in combination with the computer model.
- (3)
- Transfer simulation based on the effect of each measurement error to obtain the angular values containing random errors between the datum platform, the M1&Instruments holder, and the M2 holder.
- (4)
- The results of the calculation in step (3) are compared with the theoretical true value in step (2) to produce a simulation error value for the datum transfer process.
5. Experiment Verification
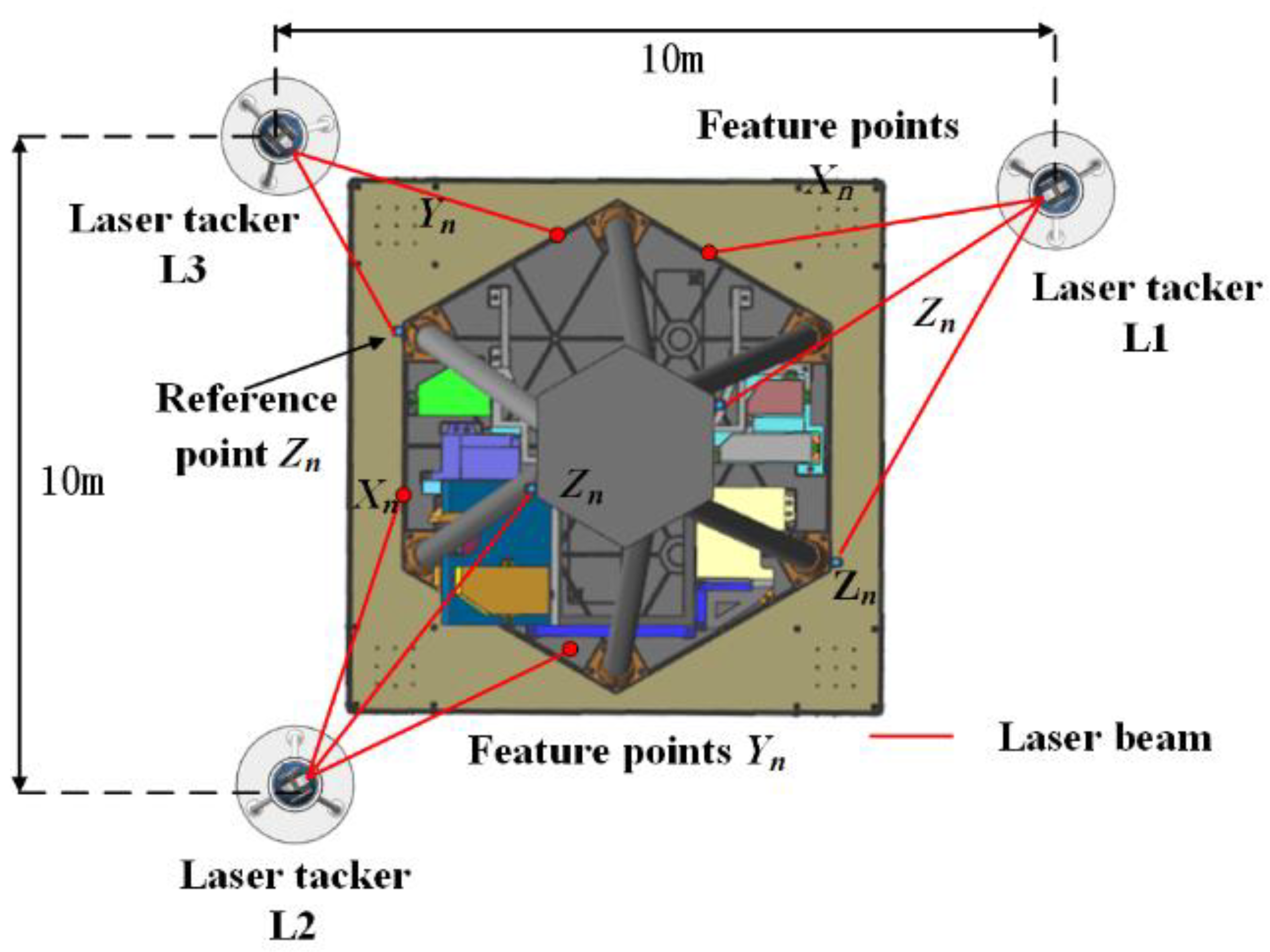
5.1. Experimental Programme
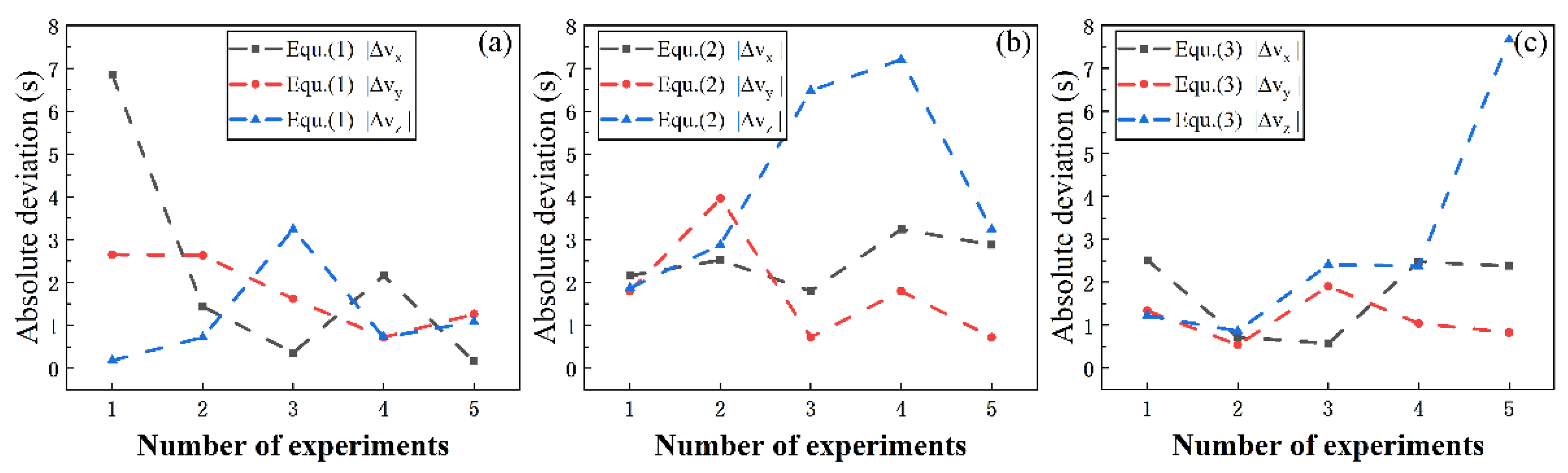
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Werner, M. The Spitzer Space Telescope. Opt. Eng. 2012, 51, 7. [Google Scholar] [CrossRef]
- Feinberg, L.; Cohen, L.; Dean, B.; Hayden, W.; Howard, J.; Keski-Kuha, R. Space telescope design considerations. Opt. Eng. 2012, 51, 9. [Google Scholar] [CrossRef]
- Fan, K.; Luo, J.; He, X.; Li, C.H.; Zhang, X.H. The Measurement of PSF Ellipticity of an Unobstructed Off-Axis Space Telescope: Error Analysis. IEEE Access 2021, 9, 120730–120743. [Google Scholar] [CrossRef]
- An, M.X.; Zhang, L.H.; Xu, S.Y.; Dong, J.H. Design, analysis, and testing of kinematic mount for astronomical observation instrument used in space camera. Rev. Sci. Instrum. 2016, 87, 9. [Google Scholar] [CrossRef]
- Kunt, C.O.; Johnston, J.; Bartoszyk, A.; Hendricks, S. Development and sizing of the JWST integrated science instrument module (ISIM) metering structure. Proc. SPIE 2006, 6273, 627322. [Google Scholar]
- Acton, D.S.; Coppock, E.; Wells, C.; Knight, J.S.; Chonis, T.S.; Coyle, L.E.; Smith, K.; Lajoie, C.-P.; Perrin, M.D.; Hadaway, J.B. Wavefront sensing and controls demo during the cryo-vac testing of JWST. Proc. SPIE 2018, 10698, 106983p. [Google Scholar]
- Irvin, R.; Rohrbach, S.O.; Seals, L.; Skelton, D.L. Optomechanical modeling of the Optical Telescope Element and Integrated Science Instrument Module (OTIS) cryo-vacuum test for the James Webb Space Telescope (JWST). Proc. SPIE 2018, 10698, 1069806. [Google Scholar]
- Kimble, R.A.; Davila, P.S.; Diaz, C.E.; Feinberg, L.D.; Glazer, S.D.; Jones, G.S.; Marsh, J.M.; Matthews, G.W.; McGuffey, D.B.; O’Rear, P.H.; et al. The integration and test program of the James Webb Space Telescope. Proc. SPIE 2012, 8442, 84422K. [Google Scholar]
- Kimble, R.A.; Feinberg, L.D.; Voyton, M.F.; Lander, J.A.; Knight, J.S.; Waldman, M.; Whitman, T.; Costas, M.B.V.; Reis, C.A.; Yang, K. James Webb Space Telescope (JWST) optical telescope element and integrated science instrument module (OTIS) cryogenic test program and results. Proc. SPIE 2018, 10698, 1069805. [Google Scholar]
- Klaassen, P.D.; Geers, V.C.; Beard, S.M.; O’Brien, A.D.; Cossou, C.; Gastaud, R.; Coulais, A.; Schreiber, J.; Kavanagh, P.J.; Topinka, M.; et al. MIRISIM: A simulator for the Mid-Infrared Instrument on JWST. Mon. Not. Roy. Astron. Soc. 2021, 500, 2813–2821. [Google Scholar] [CrossRef]
- Lightsey, P.A.; Atkinson, C.; Clampin, M.; Feinberg, L.D. James Webb Space Telescope: Large deployable cryogenic telescope in space. Opt. Eng. 2012, 51, 19. [Google Scholar] [CrossRef] [Green Version]
- Lunt, S.R.; Wells, C.; Rhodes, D.; DiAntonio, A. Use of close range photogrammetry in James Webb Space Telescope alignment testing under cryogenic conditions. J. Astron. Telesc. Instrum. Syst. 2020, 6, 20. [Google Scholar] [CrossRef]
- Matthews, G.; Scorse, T.; Kennard, S.; Spina, J.; Whitman, T.; Texter, S.; Atkinson, C.; Young, G.; Keski-Kuha, R.; Marsh, J.; et al. JWST Telescope Integration and Test Status. Proc. SPIE 2014, 9143, 914305. [Google Scholar]
- Mitchell, J.; Spence, A.; Hoang, M.; Free, A. Sensor fusion of laser trackers for use in large-scale precision metrology. Proc. SPIE 2004, 5263, 57–65. [Google Scholar]
- Predmore, C.R. Bundle adjustment of multi-position measurements using the Mahalanobis distance. Precis. Eng. 2010, 34, 113–123. [Google Scholar] [CrossRef]
- Zhao, G.; Zhang, C.; Jing, X.; Sun, Z.; Zhang, Y.; Luo, M. Station-transfer measurement accuracy improvement of laser tracker based on photogrammetry. Measurement 2016, 94, 717–725. [Google Scholar] [CrossRef]
- Liu, W.L.; Li, Y.W. A novel method for improving the accuracy of coordinate transformation in multiple measurement systems. Meas. Sci. Technol. 2017, 28, 10. [Google Scholar] [CrossRef]
- Wang, W.; Guo, J.Y.; Tao, L.; Liu, H.M. A New Method of Spacecraft Assembly Integration Alignment TestBased on Virtual Cubic Prism. In Proceedings of the 3rd International Conference on Information Science and Control Engineering (ICISCE), Beijing, China, 8–10 July 2016; pp. 77–82. [Google Scholar]
- Gong, D.; Wang, H.; Tian, T.Y. Computer-aided Alignment of off-axis three-mirror imaging spectrometer system. Proc. SPIE 2013, 8910, 89100Z. [Google Scholar]
- He, X.; Luo, J.; Wang, J.X.; Zhang, X.H.; Liu, Y.C. Improvement of a computer-aided alignment algorithm for the nonsymmetric off-axis reflective telescope. Appl. Optics 2021, 60, 2127–2140. [Google Scholar] [CrossRef]
- Hvisc, A.M.; Burge, J.H. Alignment analysis of four-mirror spherical aberration correctors. Proc. SPIE 2008, 7018, 1819. [Google Scholar]
- Zhao, X.T.; Jiao, W.C.; Liao, Z.B.; Wang, Y.; Chen, J.Y. Study on computer-aided alignment method of a three-mirror off-axis aspherical optical system. Proc. SPIE 2010, 7656, 76566. [Google Scholar]
- Engel, C.; Liotard, A.; Michau, V.; Engel, C.; Ferrari, M.; Hugot, E.; Escolle, C.; Bonnefois, A.; Bernot, M.; Bret-Dibat, T.; et al. The Lam Space Active Optics Facility. Proc. SPIE 2017, 10563, 105632X. [Google Scholar]
- Wang, F.; Li, H.; Yang, F. Ability of the Thin Mirror Active Optics to Correct Optical Astigmation. Acta Photonica Sinica 2010, 39, 871–875. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, K.; Wang, W.; Zhou, P.; Gu, Z.; Dong, J.; Xu, S. Active optics system prototype applied on a passive large aperture off-axis LEO space telescope. Opt. Eng. 2018, 57, 8. [Google Scholar] [CrossRef]
- Guan, X.; Xu, Y.M.; Xing, C. A Method for Rapid Measurement of the Deformation and Spatial Attitude of Large Radar Antennas Inside Radomes. IEEE Access 2021, 9, 64686–64695. [Google Scholar] [CrossRef]
- Liao, T.T. Modeling and analysis of laser shaft alignment using 4 × 4 homogeneous coordinate transformation matrix. Measurement 2009, 42, 157–163. [Google Scholar] [CrossRef]
- Lou, Y.M.; Hu, J.M. Coordinate transformation of three-dimensional image in integral imaging system illuminated by a point light source. Optik 2021, 226, 7. [Google Scholar] [CrossRef]
- Shi, Z.; Zhao, W.G.; Yang, L.B.; Xun, Y.; Li, Q.Y.; Zhang, Y.Y. Research and Experiment of Repairable Space Telescope Interface System. IEEE Access 2020, 8, 225097–225108. [Google Scholar] [CrossRef]
- Yang, Z.; Shen, Y.; Deng, Y.; Li, C. Rapid cubic prism collimation and attitude measurement method based on laser tracker. Infrared Laser Eng. 2018, 47, 1017001. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reflector | Dx | Dy | Dz | Tx | Ty |
|---|---|---|---|---|---|
| M1 | 0.5761 | 1.337 | 4.381 | 53.61 | 92.55 |
| M2 | 0.3955 | 1.324 | 8.982 | 27.35 | 7.531 |
| M3 | 0.0233 | −0.0145 | −0.0908 | 11.78 | 1.474 |
| Projects | Dx | Dy | Dz | Tx | Ty |
|---|---|---|---|---|---|
| RMS (λ) | 0.001 | 0.004 | 0.001 | 0.008 | 0.003 |
| Tolerance requirements | ±0.01 mm | ±0.07 mm | ±0.001 mm | ±2″ | ±2″ |
| Angular Relationships | Symbols | Theoretical Value |
|---|---|---|
| Cubic prism 1 | ||
| Cubic prism 2 | ||
| Cubic prism 3 | ||
| OO to OB | ||
| OB to OS | ||
| OCO to OCB | ||
| OCB to OCS |
| Instrument | Sources of Error | μ | 3σ |
|---|---|---|---|
| Theodolite | Collimation error | 0 | |
| Cubic prism introduces error | 0 | ||
| Cubic prism goniometric error | 0 | ||
| Mutual aiming error | 0 | - | |
| Focusing error | 0 | - | |
| Laser tracker | Distance measurement error | 0 | |
| Reflector manufacturing errors | 0 | ||
| Photogrammetry | Coordinate point measurement error | 0 | |
| Coordinate system errors | Cubic prism coordinate system error | 0 | |
| Datum alignment error | 0 |
| Angular Relationships | Symbols | Theoretical Value |
|---|---|---|
| cubic prism 1 | ||
| cubic prism 2 | ||
| cubic prism 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, T.; He, X.; Zhang, X.; Luo, J.; Wang, J.; Li, C.; You, C.; Jiang, C.; Liu, Y. Multi-Source Data Fusion Method for the Truss Structure Stability Measurement of Space Telescope. Appl. Sci. 2022, 12, 5562. https://doi.org/10.3390/app12115562
Xu T, He X, Zhang X, Luo J, Wang J, Li C, You C, Jiang C, Liu Y. Multi-Source Data Fusion Method for the Truss Structure Stability Measurement of Space Telescope. Applied Sciences. 2022; 12(11):5562. https://doi.org/10.3390/app12115562
Chicago/Turabian StyleXu, Tianxiao, Xu He, Xiaohui Zhang, Jing Luo, Jinxin Wang, Chenghao Li, Chenxu You, Chengqiang Jiang, and Yichen Liu. 2022. "Multi-Source Data Fusion Method for the Truss Structure Stability Measurement of Space Telescope" Applied Sciences 12, no. 11: 5562. https://doi.org/10.3390/app12115562