
A Comparison Study on Magnetorheological Multi-Disc Clutches in Steady Continuous-Duty States from the Viewpoint of Electrical Energy Consumption and Spatial Temperature Distribution



Abstract
:1. Introduction
2. Materials and Methods
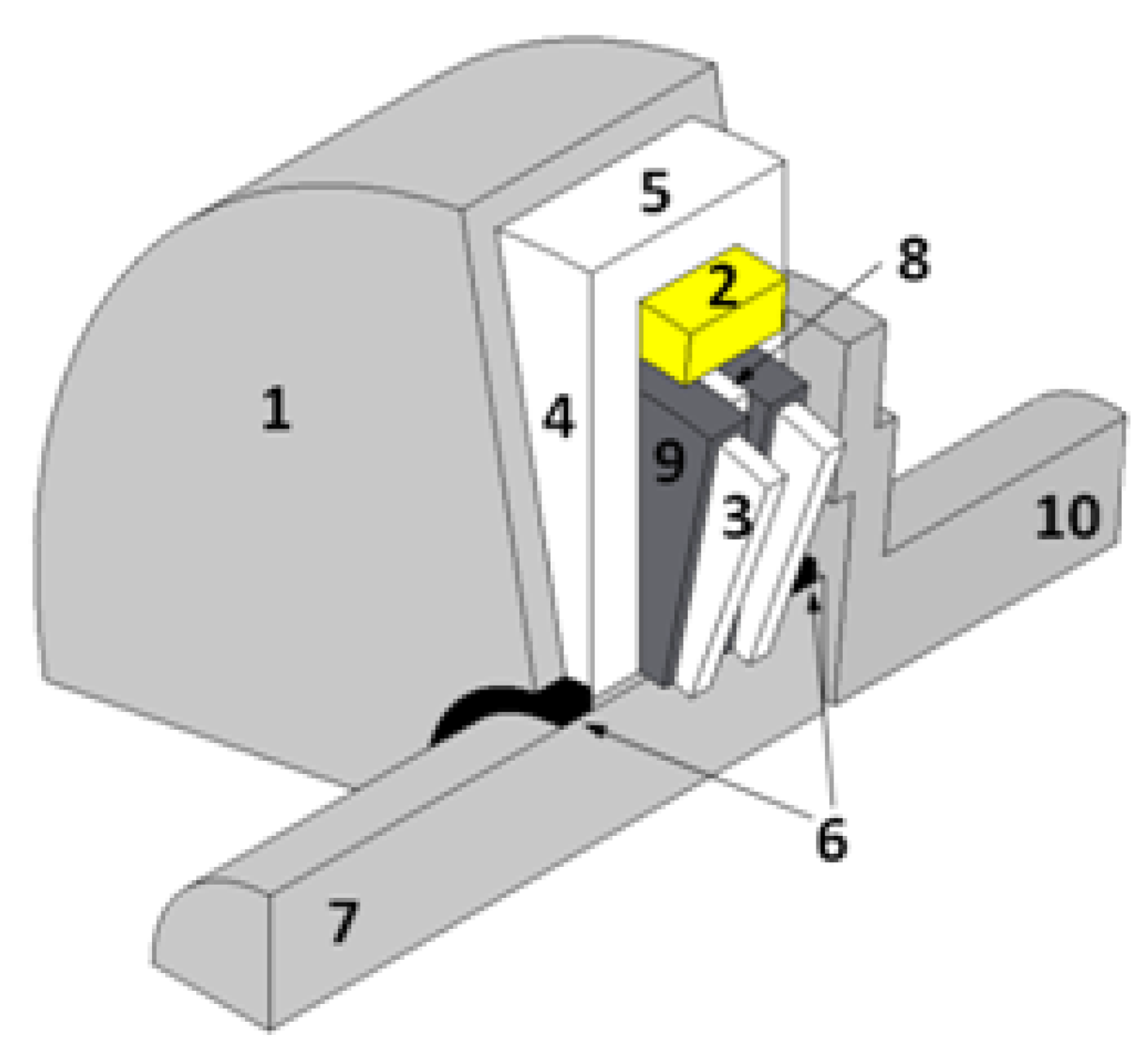
2.1. Electromagnetic Analysis
- The thickness of the MR fluid gap g is the same ( mm);
- Discs, cylinder yokes and cover yokes are made of the same magnetic steel;
- Shaft and mounting rings, separating the coil from the working region, are made of the same non-magnetic steel;
- Current density is assumed the same ( = 4.5 A/mm2) [13];
- Excitation current I is assumed the same ( 0.6 A);
- The magnetic flux density in MR fluid-gaps is kept the same despite variations in the geometries of clutches (.7 T);
- The maximum magnetic field density is kept the same (.2 T) despite variations in the geometries of clutches (the most saturated point lies within the cover yoke at a length approximately equal to the external radius of primary member discs).
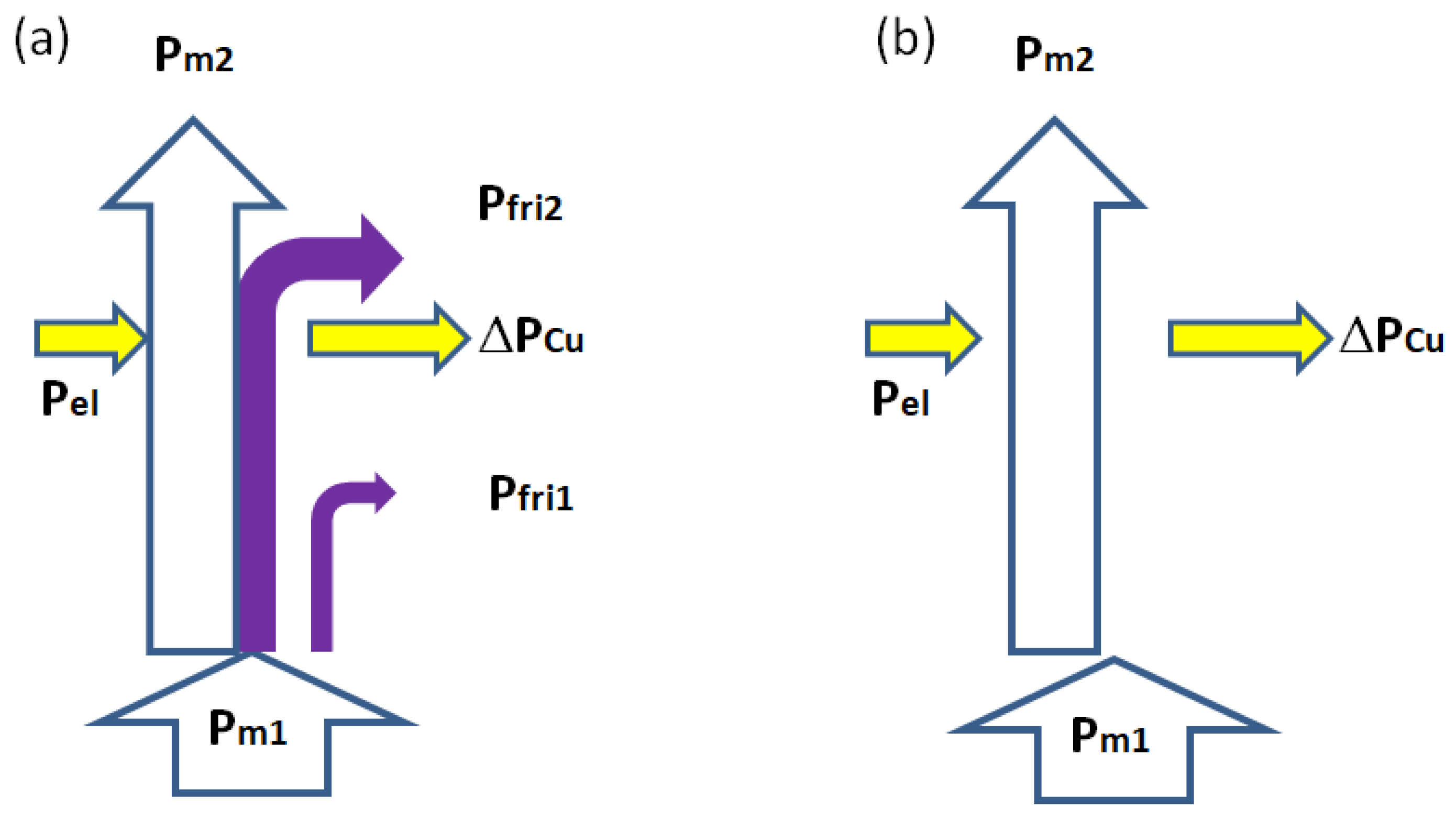
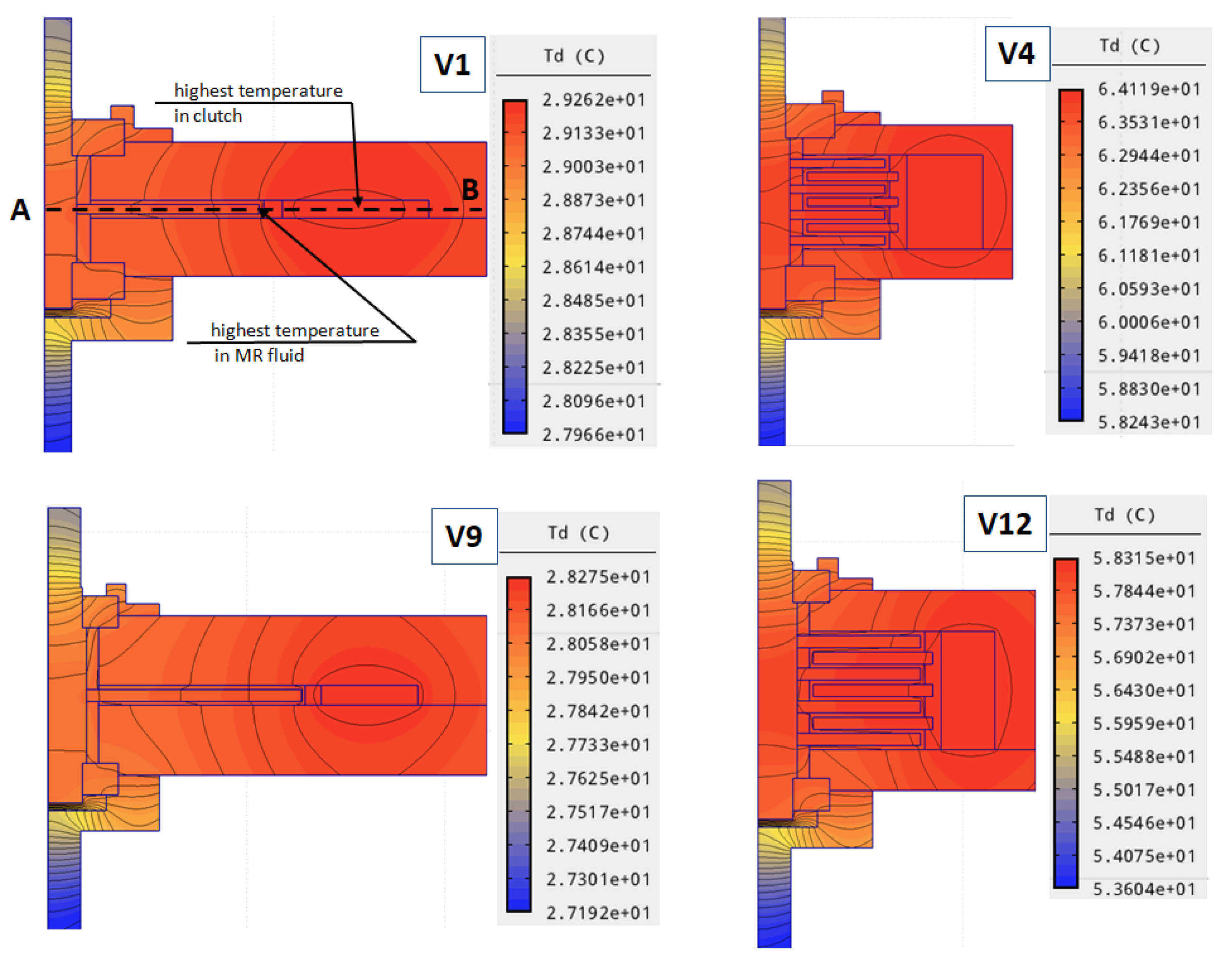
2.2. Thermal Analysis
3. Results
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MR clutches | Magnetorheological clutches |
References
- Pisetskiy, S.; Kermani, M.R. A Concept of a Miniaturized MR Clutch Utilizing MR Fluid in Squeeze Mode. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 6347–6352. [Google Scholar]
- Xiong, H.; Luo, Y.; Ji, D.; Ren, H.; Weid, D.; Liu, W. Analysis and evaluation of temperature field and experiment for magnetorheological fluid testing devices. Adv. Mech. Eng. 2021, 13. [Google Scholar] [CrossRef]
- Piech, Z., IV; Szeląg, W. Elevator Brake with Magneto-Rheological Fluid. US Patent US 8,631,917 B2, 21 January 2014. [Google Scholar]
- Kowol, P. Hamulce Magnetoreologiczne o Jednym i Dwóch Stopniach Swobody. (Magnetorheological Brakes with 1 or 2 DoF). Ph.D. Thesis, Silesian University of Technology, Gliwice, Poland, 2007. (In Polish). [Google Scholar]
- East, W.; Turcotte, J.; Plante, J.; Julio, G. Experimental assessment of a linear actuator driven by magnetorheological clutches for automotive active suspensions. J. Intell. Mater. Syst. Struct. 2021, 32, 955–970. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Zi, B.; Zeng, Y.; Xie, F.; Hou, Y. An investigation of thermal characteristics of a liquid-cooled magnetorheological fluid-based clutch. Smart Mater. Struct. 2015, 24, 055020. [Google Scholar] [CrossRef]
- Rahul, R.; Pugazhenthi, R.; Eugene, J.; Antony, A.; Viswanath, B. Mathematical Modelling of Temperature Rise in Clutch and Design, Analysis and Fabrication of Cooling System for Clutch. Int. J. Sci. Eng. Res. 2015, 6, 603–611. [Google Scholar]
- Agyeman, P.K.; Tan, G.; Alex, F.J.; Peng, D.; Valiev, J.; Tang, J. Mathematical The study on thermal management of magnetorheological fluid retarder with thermoelectric cooling module. Case Stud. Therm. Eng. 2021, 28, 101686. [Google Scholar] [CrossRef]
- Jędryczka, C.; Szeląg, W.; Myszkowski, A. Model of coupled electromagnetic, hydrodynamic, thermal and mechanical motion phenomena in axial symmetry magnetorheological fluid torque transducer. Electr. Rev. 2010, R86, 195–200. (In Polish) [Google Scholar]
- Kluszczyński, K.; Pilch, Z. The Choice of the Optimal Number of Discs in an MR Clutch from the Viewpoint of Different Criteria and Constraints. Energies 2021, 14, 6888. [Google Scholar] [CrossRef]
- Kowol, P.; Pilch, Z. Analysis of the magnetorheological clutch working at full slip state. Electr. Rev. 2015, 1, 110–113. [Google Scholar] [CrossRef] [Green Version]
- Kluszczyński, K.; Pilch, Z. Integrated analytical-field design method of multi-disc magnetorheological clutches for automotive applications. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69. [Google Scholar]
- Standard Specification for Standard Nominal Diameters and Cross-Sectional Areas of AWG Sizes of Solid Round Wires Used as Electrical Conductors. ASTM International. 2014. Available online: http://www.astm.org/Standards/B258.htm (accessed on 3 July 2022).
- Pilch, Z. Analysis of Established Thermal Conditions for Magnetorheological Clutch for Different Loading Conditions. In Analysis and Simulation of Electrical and Computer Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 197–213. [Google Scholar]
- Available online: http://www.agros2d.org/ (accessed on 6 June 2022).
- MRF-140CGMRFluid. Available online: https://lordfulfillment.com (accessed on 3 July 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
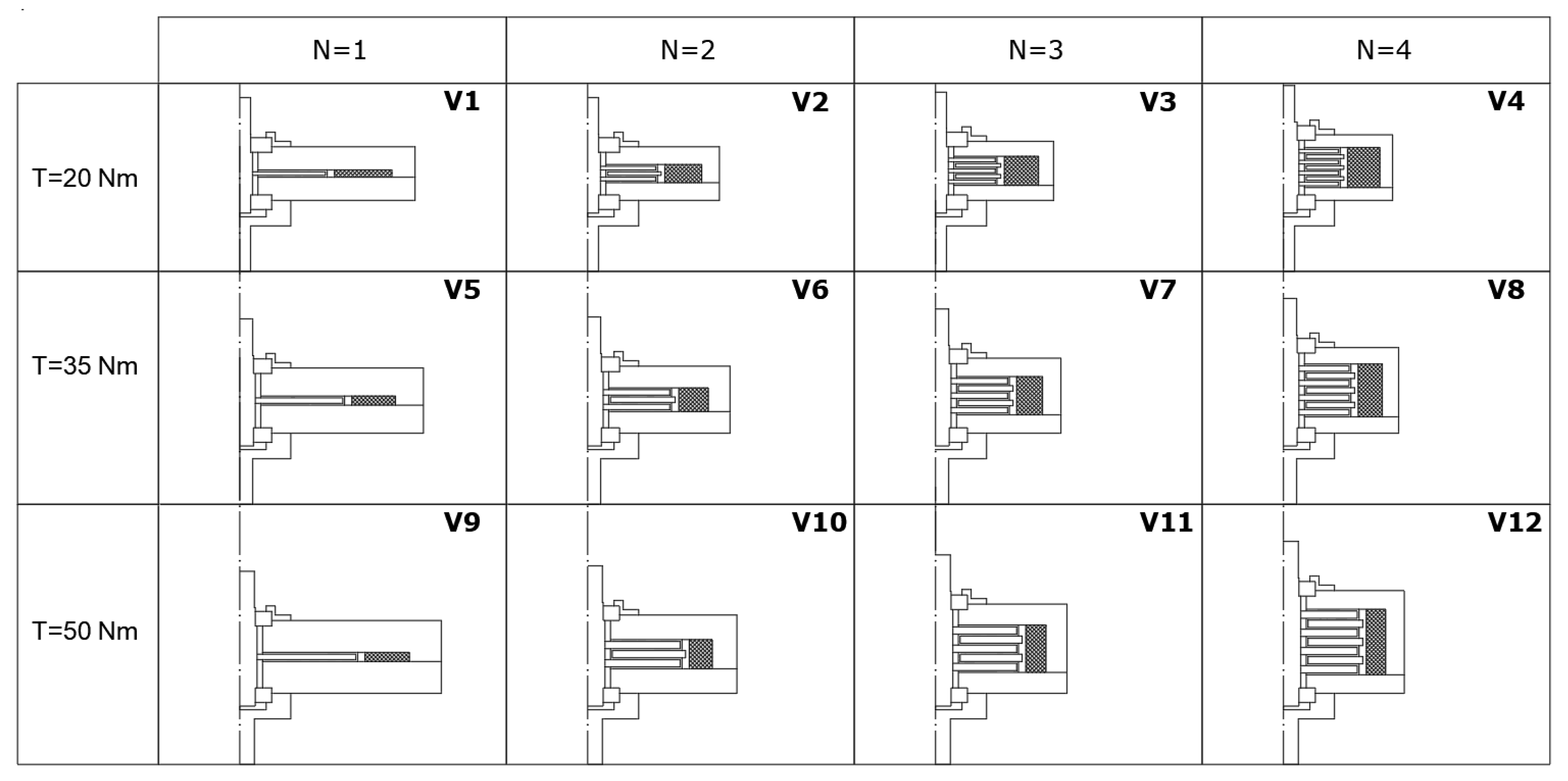
| Variants | V1 | V2 | V3 | V4 | V5 | V6 |
|---|---|---|---|---|---|---|
| (mm) | 51.9 | 42.1 | 37.2 | 34.2 | 61.5 | 49.7 |
| (mm) | 83.9 | 62.3 | 56.0 | 51.9 | 85.9 | 65.9 |
| (mm) | 4 | 10 | 16 | 22 | 5 | 13 |
| z (-) | 366 | 694 | 1026 | 1365 | 368 | 695 |
| m (-) | 62 | 39 | 36 | 34 | 47 | 31 |
| n (-) | 6 | 18 | 29 | 41 | 8 | 23 |
| Variants | V7 | V8 | V9 | V10 | V11 | V12 |
| (mm) | 43.9 | 40.2 | 68.7 | 55.4 | 48.9 | 44.7 |
| (mm) | 58.1 | 53.4 | 93.1 | 71.6 | 63.1 | 57.9 |
| (mm) | 21 | 29 | 5 | 13 | 21 | 29 |
| z (-) | 1028 | 1363 | 370 | 697 | 1030 | 1364 |
| m (-) | 27 | 25 | 47 | 31 | 27 | 25 |
| n (-) | 39 | 55 | 8 | 23 | 39 | 55 |
| Variants | V1 | V2 | V3 | V4 | V5 | V6 |
|---|---|---|---|---|---|---|
| (Ohm) | 20.89 | 29.61 | 38.88 | 47.69 | 22.79 | 32.52 |
| (Ohm) | 20.83 | 30.35 | 39.98 | 49.16 | 22.73 | 33.65 |
| (W) | 7.52 | 10.66 | 13.99 | 17.17 | 8.20 | 11.71 |
| (W) | 7.49 | 10.93 | 14.39 | 17.70 | 8.18 | 12.11 |
| Variants | V7 | V8 | V9 | V10 | V11 | V12 |
| (Ohm) | 42.22 | 51.32 | 24.55 | 35.86 | 46.49 | 56.32 |
| (Ohm) | 43.87 | 53.34 | 25.09 | 37.08 | 48.29 | 58.54 |
| (W) | 15.20 | 18.47 | 8.84 | 12.91 | 16.73 | 20.27 |
| (W) | 15.79 | 19.20 | 9.03 | 13.35 | 17.38 | 21.07 |
| - | Material | [1/K] | [W/m·K] | [W/m2·K] | c [J/kg·K] | [kg/m3] |
|---|---|---|---|---|---|---|
| 1 | air | = 0.0257 | = 10 | 1005 | 1.205 | |
| 2 | non-magnetic steel | = 16.26 | - | 502.1 | 8027.2 | |
| 3 | copper | = 372 | - | 380 | 8800 | |
| 4 | sealing plastic | = 0.25 | - | 1260 | 1014 | |
| 5 | magnetic steel | = 54 | - | 465 | 7833 | |
| 6 | MR fluid | = 0.8 | - | 680 | 3640 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kluszczyński, K.; Pilch, Z. A Comparison Study on Magnetorheological Multi-Disc Clutches in Steady Continuous-Duty States from the Viewpoint of Electrical Energy Consumption and Spatial Temperature Distribution. Appl. Sci. 2022, 12, 7895. https://doi.org/10.3390/app12157895
Kluszczyński K, Pilch Z. A Comparison Study on Magnetorheological Multi-Disc Clutches in Steady Continuous-Duty States from the Viewpoint of Electrical Energy Consumption and Spatial Temperature Distribution. Applied Sciences. 2022; 12(15):7895. https://doi.org/10.3390/app12157895
Chicago/Turabian StyleKluszczyński, Krzysztof, and Zbigniew Pilch. 2022. "A Comparison Study on Magnetorheological Multi-Disc Clutches in Steady Continuous-Duty States from the Viewpoint of Electrical Energy Consumption and Spatial Temperature Distribution" Applied Sciences 12, no. 15: 7895. https://doi.org/10.3390/app12157895