
Exploring Microscopic Characteristics of Bicycle Riders’ following Behaviors in a Single-File Movement

 , , , and
, , , and
Abstract
:1. Introduction
2. Methods
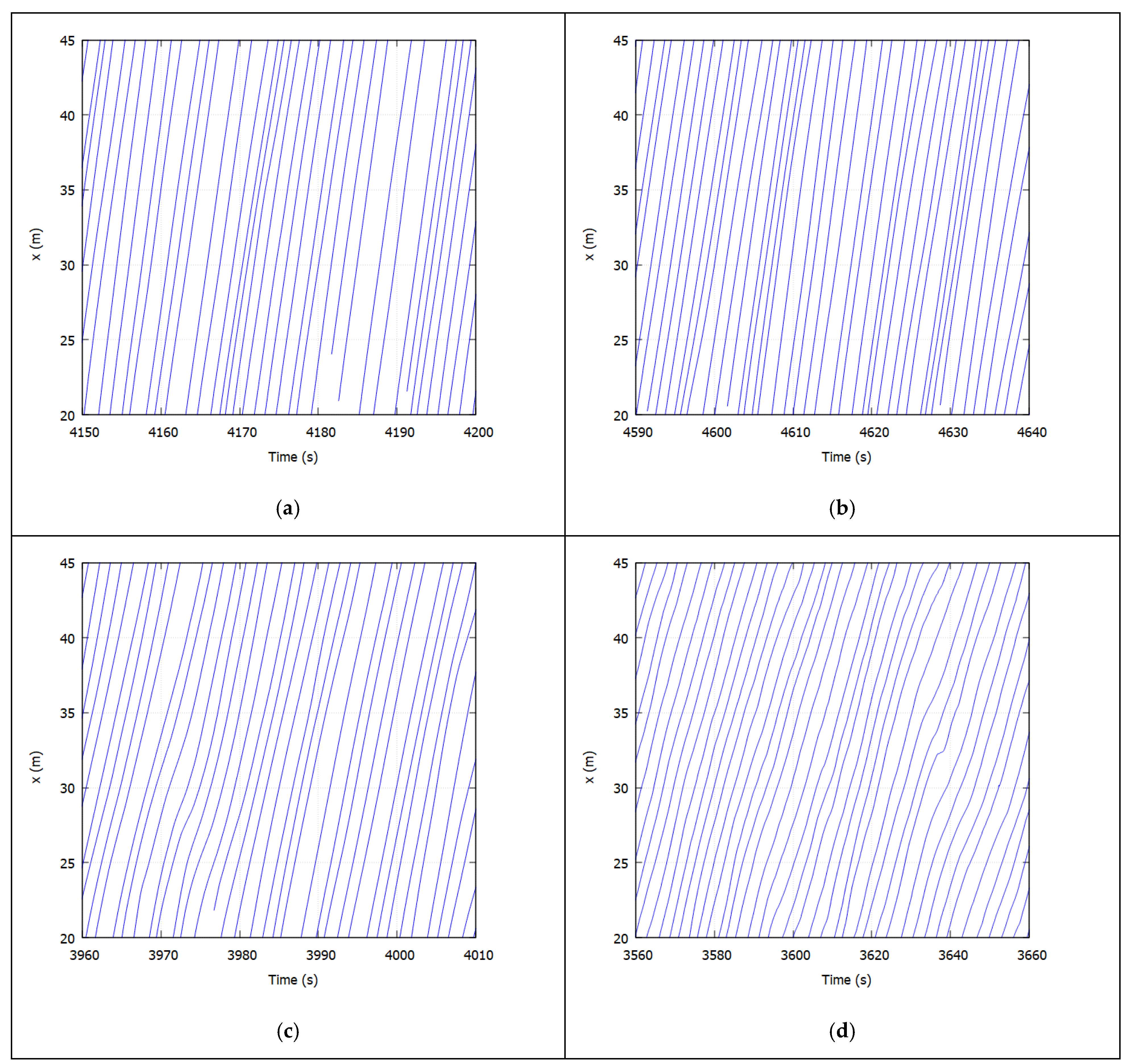
2.1. Data
2.2. Extracted Microscopic Variables for Cyclists’ Riding Behaviors
2.3. Modelling Cyclists’ following Behaviors
3. Characteristics of the Cyclists’ Interactions
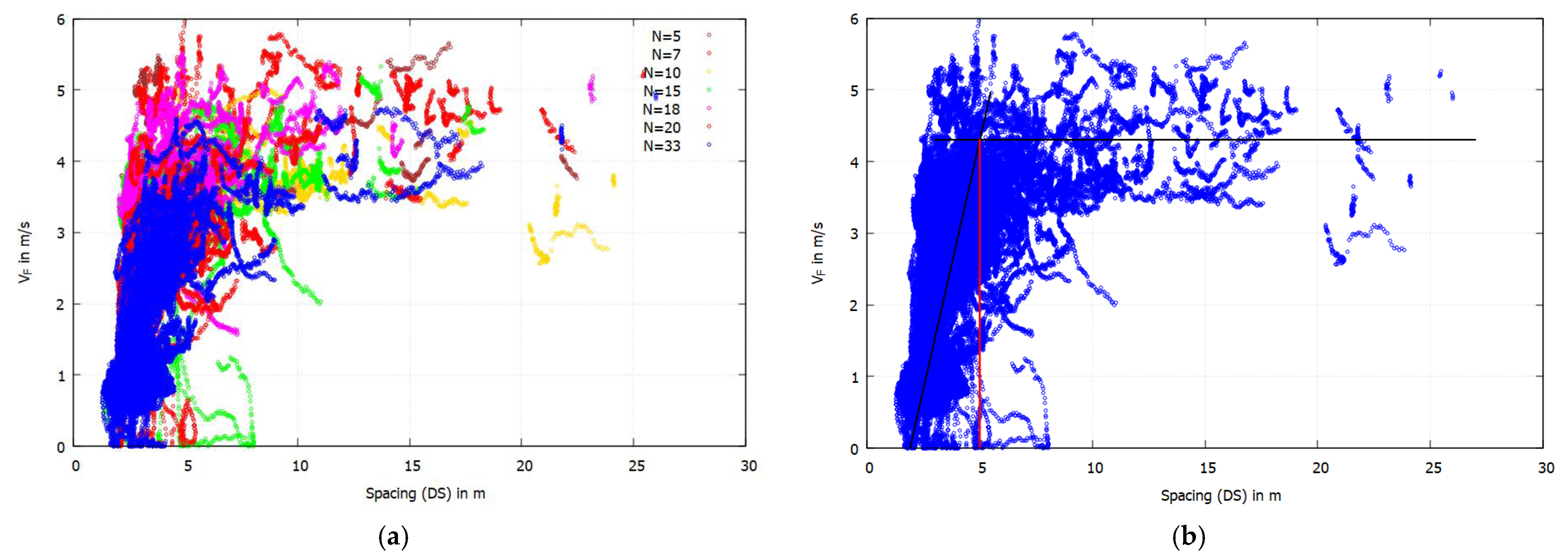
3.1. Relationship between Speed and Spacing
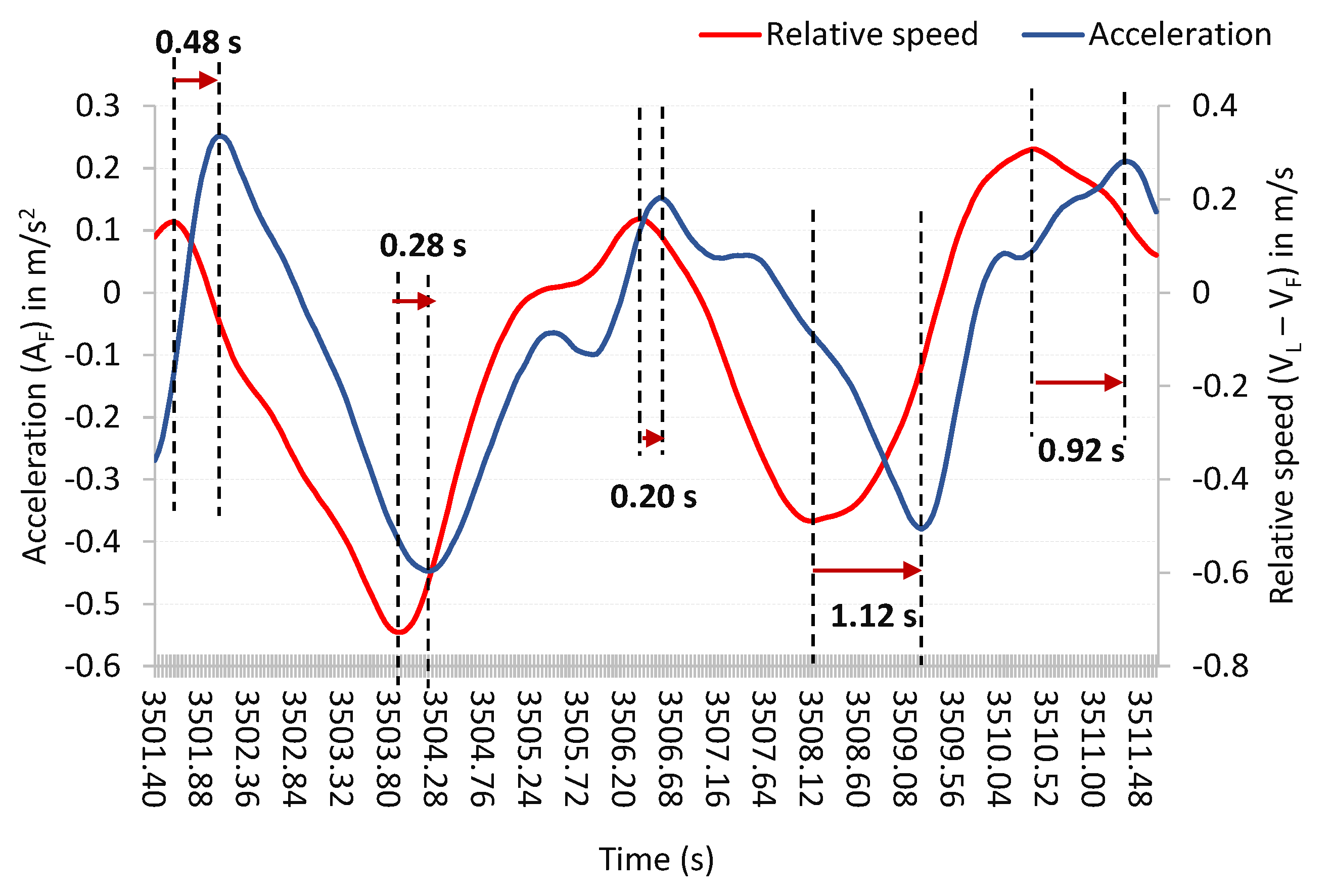
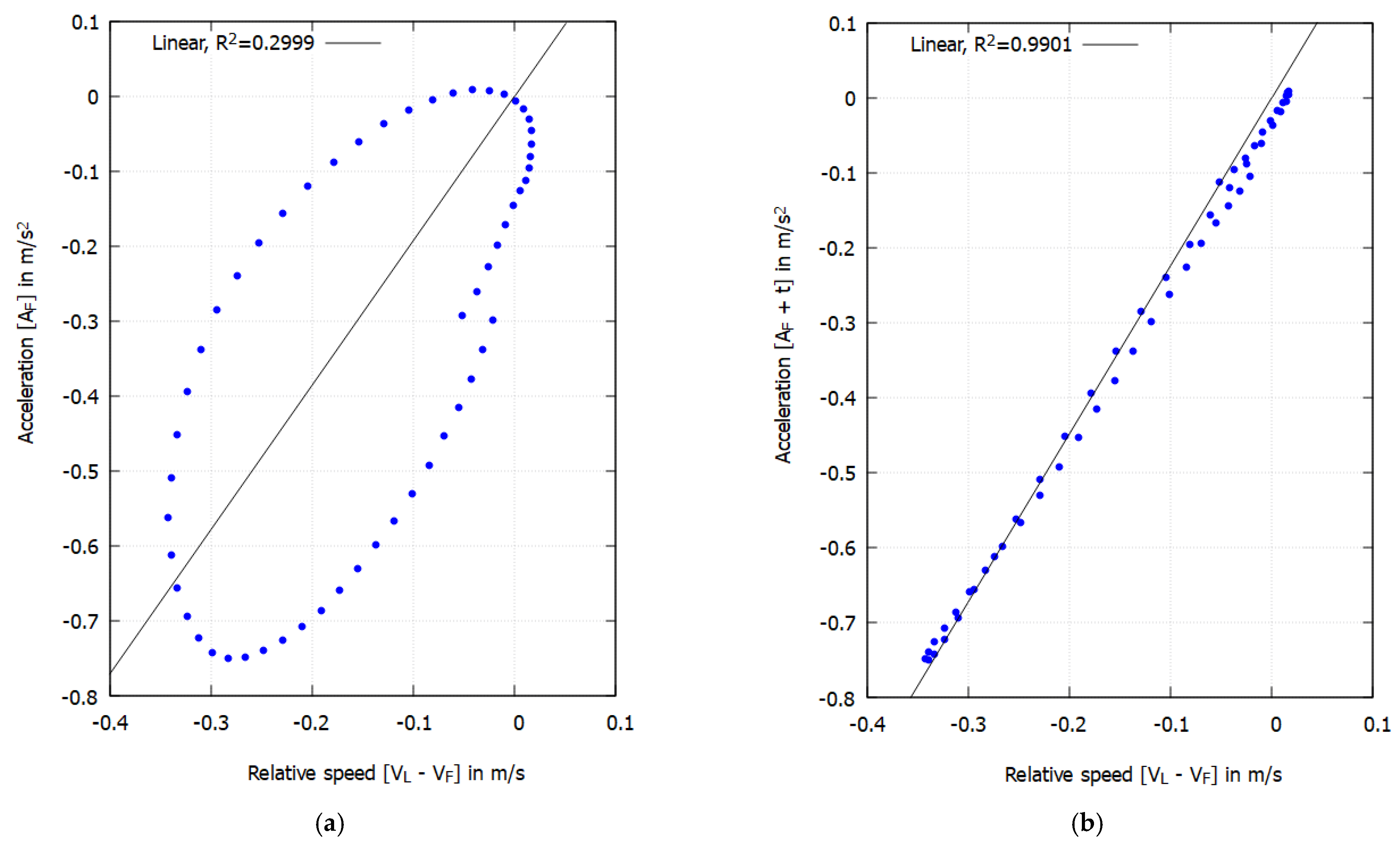
3.2. Relationship between Relative Speed and Acceleration
3.3. Multiple Linear Regression Model for Acceleration and Deceleration Behaviors
3.3.1. Model for Acceleration Behavior
3.3.2. Model for Deceleration Behavior
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, M.; Zhou, X. Bike-sharing systems and congestion: Evidence from US cities. J. Transp. Geogr. 2017, 65, 147–154. [Google Scholar] [CrossRef]
- Hamilton, T.L.; Wichman, C.J. Bicycle infrastructure and traffic congestion: Evidence from DC’s Capital Bikeshare. J. Environ. Econ. Manag. 2018, 87, 72–93. [Google Scholar] [CrossRef]
- Fan, Y.; Zheng, S. Dockless bike sharing alleviates road congestion by complementing subway travel: Evidence from Beijing. Cities 2020, 107, 102895. [Google Scholar] [CrossRef]
- Teixeira, J.F.; Silva, C.; Moura e Sá, F. Empirical evidence on the impacts of bikesharing: A literature review. Transp. Rev. 2021, 41, 329–351. [Google Scholar] [CrossRef]
- Grøntved, A.; Rasmussen, M.G.; Blond, K.; Østergaard, L.; Andersen, Z.J.; Møller, N.C. Bicycling for transportation and recreation in cardiovascular disease prevention. Curr. Cardiovasc. Risk Rep. 2019, 13, 26. [Google Scholar] [CrossRef]
- De Hartog, J.J.; Boogaard, H.; Nijland, H.; Hoek, G. Do the health benefits of cycling outweigh the risks? Environ. Health Perspect. 2010, 118, 1109–1116. [Google Scholar] [CrossRef]
- Lindsay, G.; Macmillan, A.; Woodward, A. Moving urban trips from cars to bicycles: Impact on health and emissions. Aust. New Zealand J. Public Health 2011, 35, 54–60. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Ye, R.; Wang, H. Exploring the causal effects of bicycling for transportation on mental health. Transp. Res. Part D Transp. Environ. 2021, 93, 102773. [Google Scholar] [CrossRef]
- Andresen, E.; Chraibi, M.; Seyfried, A.; Huber, F. Basic driving dynamics of cyclists. In Simulation of Urban MObility User Conference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 18–32. [Google Scholar]
- Qu, Z.W.; Cao, N.B.; Chen, Y.H.; Zhao, L.Y.; Bai, Q.W.; Luo, R.Q. Modeling electric bike–car mixed flow via social force model. Adv. Mech. Eng. 2017, 9, 1687814017719641. [Google Scholar] [CrossRef]
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282. [Google Scholar] [CrossRef]
- Xue, S.; Feliciani, C.; Shi, X.; Jiang, R. Understanding the single-file dynamics of bicycle traffic from the perspective of car-following models. J. Stat. Mech. Theory Exp. 2020, 2020, 053402. [Google Scholar] [CrossRef]
- Kaths, H.; Keler, A.; Bogenberger, K. Calibrating the wiedemann 99 car-following model for bicycle traffic. Sustainability 2021, 13, 3487. [Google Scholar] [CrossRef]
- Wiedemann, R. Simulation des Strassenverkehrsflusses; Schriftenreihe des Instituts für Verkehrswesen der Universität Karlsruhe, Band 8; Instituts für Verkehrswesen der Universität Karlsruhe: Karlsruhe, Germany, 1974. [Google Scholar]
- Kurtc, V.; Treiber, M. Simulating bicycle traffic by the intelligent-driver model-Reproducing the traffic-wave characteristics observed in a bicycle-following experiment. J. Traffic Transp. Eng. (Engl. Ed.) 2020, 7, 19–29. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef] [PubMed]
- Alsaleh, R.; Sayed, T. Modeling pedestrian-cyclist interactions in shared space using inverse reinforcement learning. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 37–57. [Google Scholar] [CrossRef]
- Rui, Y.X.; Tang, T.Q.; Zhang, J. An improved social force model for bicycle flow in groups. J. Adv. Transp. 2021, 2021, 2412655. [Google Scholar] [CrossRef]
- Li, Y.; Ni, Y.; Sun, J. A modified social force model for high-density through bicycle flow at mixed-traffic intersections. Simul. Model. Pract. Theory 2021, 108, 102265. [Google Scholar] [CrossRef]
- Guo, N.; Jiang, R.; Wong, S.C.; Hao, Q.Y.; Xue, S.Q.; Xiao, Y.; Wu, C.Y. Modeling the interactions of pedestrians and cyclists in mixed flow conditions in uni-and bidirectional flows on a shared pedestrian-cycle road. Transp. Res. Part B Methodol. 2020, 139, 259–284. [Google Scholar] [CrossRef]
- Guo, N.; Jiang, R.; Wong, S.C.; Hao, Q.Y.; Xue, S.Q.; Hu, M.B. Bicycle flow dynamics on wide roads: Experiments and simulation. Transp. Res. Part C Emerg. Technol. 2021, 125, 103012. [Google Scholar] [CrossRef]
- Chandler, R.E.; Herman, R.; Montroll, E.W. Traffic dynamics: Studies in car following. Oper. Res. 1958, 6, 165–184. [Google Scholar] [CrossRef]
- Helly, W. Simulation of bottlenecks in single-lane traffic flow. In Proceedings of the Symposium on Theory of Traffic Flow, Research Laboratories, General Motors; Elsevier: Amsterdam, The Netherlands, 1959. [Google Scholar]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, H.M. A unified follow-the-leader model for vehicle, bicycle and pedestrian traffic. Transp. Res. Part B Methodol. 2017, 105, 315–327. [Google Scholar] [CrossRef]
- Gurusinghe, G.S.; Nakatsuji, T.; Azuta, Y.; Ranjitkar, P.; Tanaboriboon, Y. Multiple car-following data with real-time kinematic global positioning system. Transp. Res. Rec. 2002, 1802, 166–180. [Google Scholar] [CrossRef]
- Ranjitkar, P.; Nakatsuji, T.; Azuta, Y.; Gurusinghe, G.S. Stability analysis based on instantaneous driving behavior using car-following data. Transp. Res. Rec. 2003, 1852, 140–151. [Google Scholar] [CrossRef]
- Brackstone, M.; McDonald, M. Car-following: A historical review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Le Runigo, C.; Benguigui, N.; Bardy, B.G. Visuo-motor delay, information–movement coupling, and expertise in ball sports. J. Sport Sci. 2010, 28, 327–337. [Google Scholar] [CrossRef]
- Rio, K.W.; Rhea, C.K.; Warren, W.H. Follow the leader: Visual control of speed in pedestrian following. J. Vis. 2014, 14, 4. [Google Scholar] [CrossRef]
- Dias, C.; Abdullah, M.; Ahmed, D.; Subaih, R. Pedestrians’ Microscopic Walking Dynamics in Single-File Movement: The Influence of Gender. Appl. Sci. 2022, 12, 9714. [Google Scholar] [CrossRef]
- Xue, S.Q.; Shiwakoti, N.; Shi, X.M.; Xiao, Y. Investigating the characteristic delay time in the leader-follower behavior in children single-file movement. Chin. Phys. B 2022, 32, 028901. [Google Scholar] [CrossRef]
- Dias, C.; Iryo, M.; Shimono, K.; Nakano, K. Experimental analysis of segway rider behavior under mixed traffic conditions. Seisan Kenkyu 2017, 69, 81–85. [Google Scholar]
- Chow, L.F.; Zhao, F.; Liu, X.; Li, M.T.; Ubaka, I. Transit ridership model based on geographically weighted regression. Transp. Res. Rec. 2006, 1972, 105–114. [Google Scholar] [CrossRef]
- Green, M.A. Roadway Human Factors: From Science to Application; Lawyers & Judges Publishing Company: Tucson, AZ, USA, 2018. [Google Scholar]
- Roman, H.E.; Croccolo, F.; Riccardi, C. Extreme fluctuation events in a simple high-density traffic model. Phys. A Stat. Mech. Its Appl. 2008, 387, 5575–5582. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sum of Squares | df | Mean Square | F | Sig. | |
|---|---|---|---|---|---|
| Regression | 3.213 | 2 | 1.607 | 128.743 | 0.000 |
| Residual | 131.287 | 10,520 | 0.012 | ||
| Total | 134.500 | 10,522 |
| Coefficients | t | Sig. | ||
|---|---|---|---|---|
| B | Std. Error | |||
| (Constant) | 0.106 | 0.005 | 21.387 | 0.000 |
| DV | 0.086 | 0.006 | 15.010 | 0.000 |
| DS | 0.010 | 0.001 | 6.588 | 0.000 |
| Sum of Squares | df | Mean Square | F | Sig. | |
|---|---|---|---|---|---|
| Regression | 8.058 | 2 | 4.029 | 262.675 | 0.000 |
| Residual | 162.319 | 10,582 | 0.015 | ||
| Total | 170.377 | 10,584 |
| Coefficients | t | Sig. | ||
|---|---|---|---|---|
| B | Std. Error | |||
| (Constant) | 0.164 | 0.005 | 31.392 | 0.000 |
| DS | −0.001 | 0.002 | −0.741 | 0.458 |
| DV | −0.123 | 0.005 | −22.877 | 0.000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dias, C.; Abdullah, M.; Hussain, Q.; Salehi, A.M.; Nishiuchi, H. Exploring Microscopic Characteristics of Bicycle Riders’ following Behaviors in a Single-File Movement. Appl. Sci. 2023, 13, 6539. https://doi.org/10.3390/app13116539
Dias C, Abdullah M, Hussain Q, Salehi AM, Nishiuchi H. Exploring Microscopic Characteristics of Bicycle Riders’ following Behaviors in a Single-File Movement. Applied Sciences. 2023; 13(11):6539. https://doi.org/10.3390/app13116539
Chicago/Turabian StyleDias, Charitha, Muhammad Abdullah, Qinaat Hussain, Ahmad Mohammadtayeb Salehi, and Hiroaki Nishiuchi. 2023. "Exploring Microscopic Characteristics of Bicycle Riders’ following Behaviors in a Single-File Movement" Applied Sciences 13, no. 11: 6539. https://doi.org/10.3390/app13116539