
Delamination Localization in Multilayered CFRP Panel Based on Reconstruction of Guided Wave Modes
 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
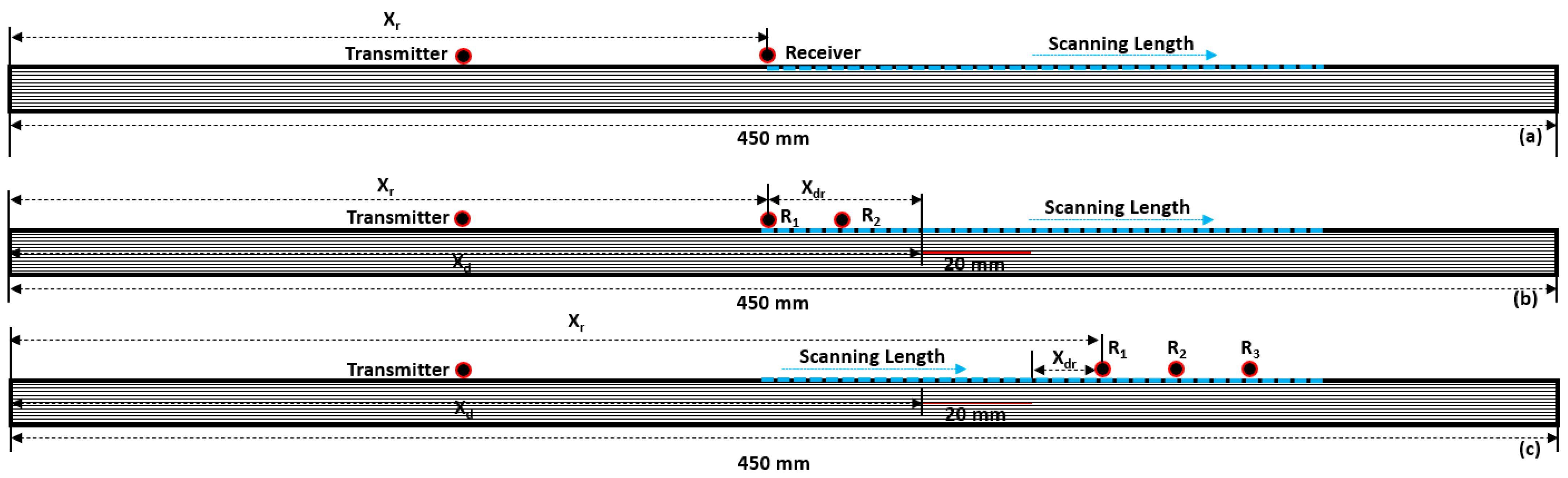
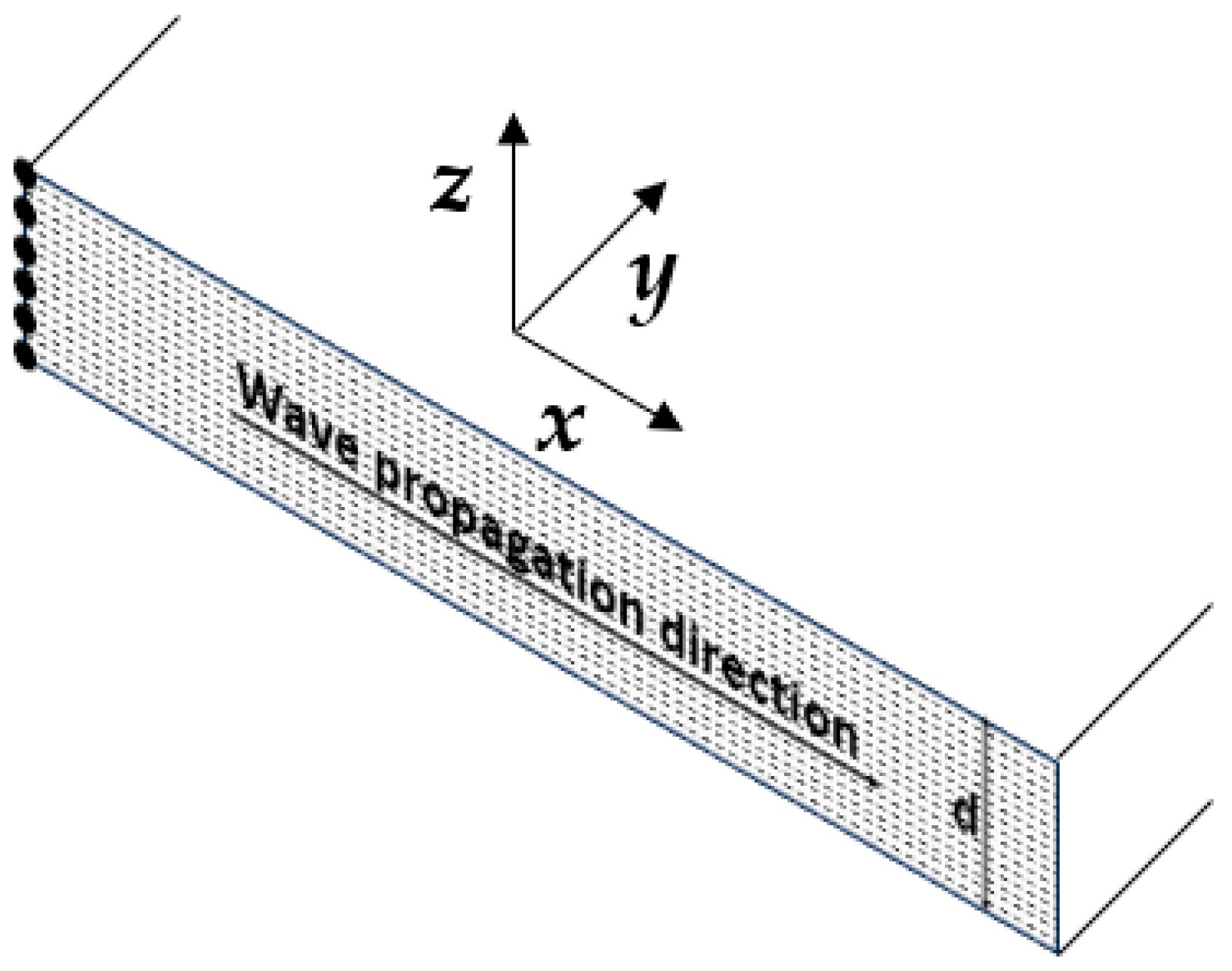
2.1. Modeling Setup
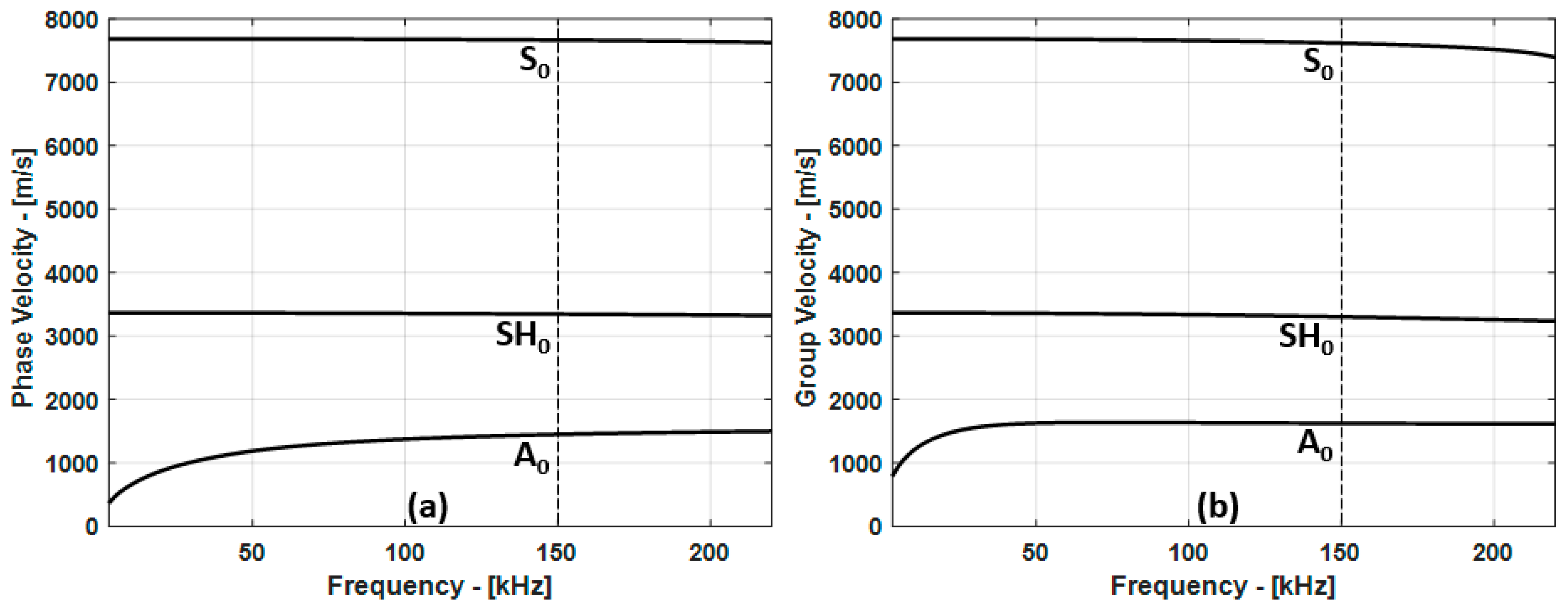
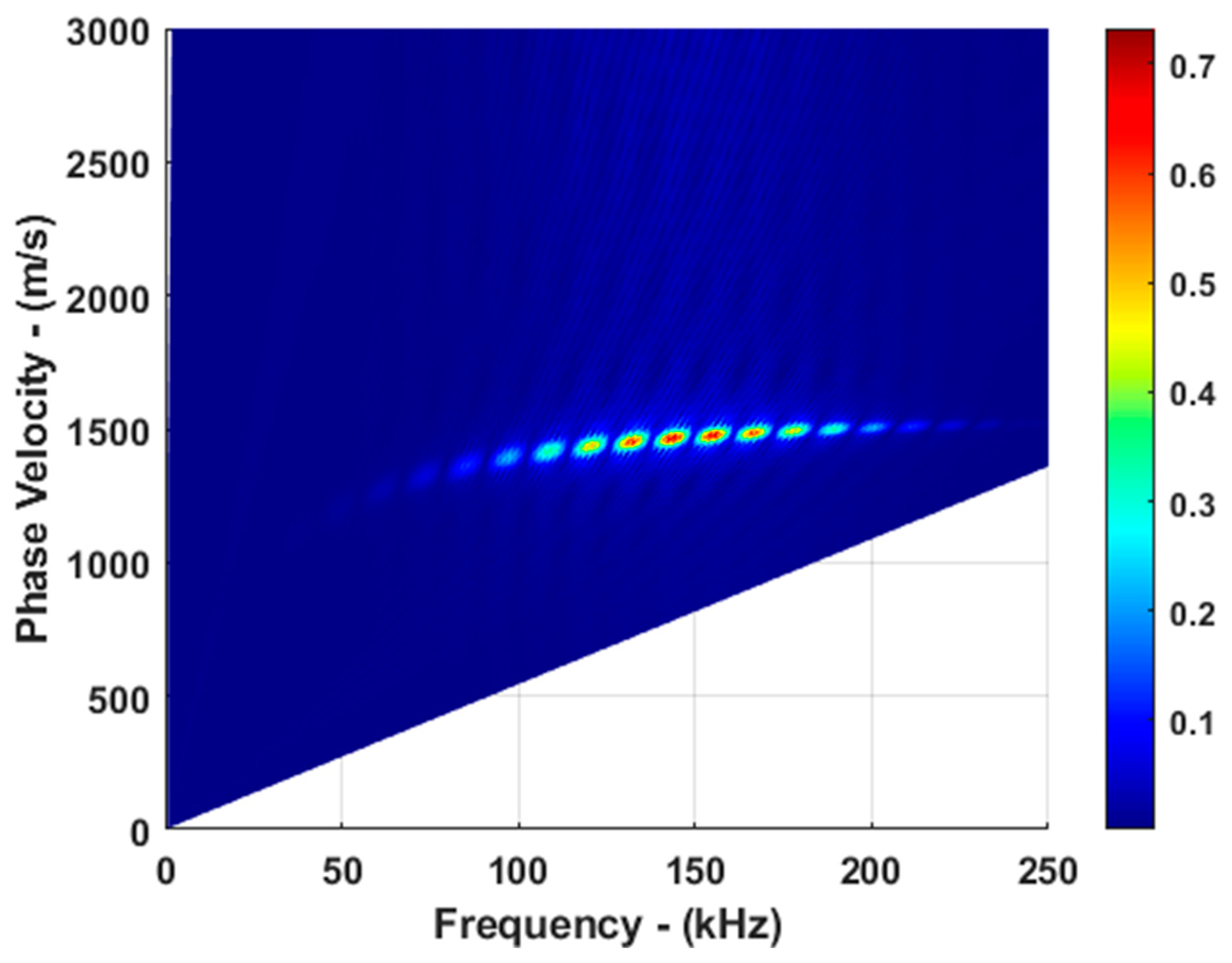
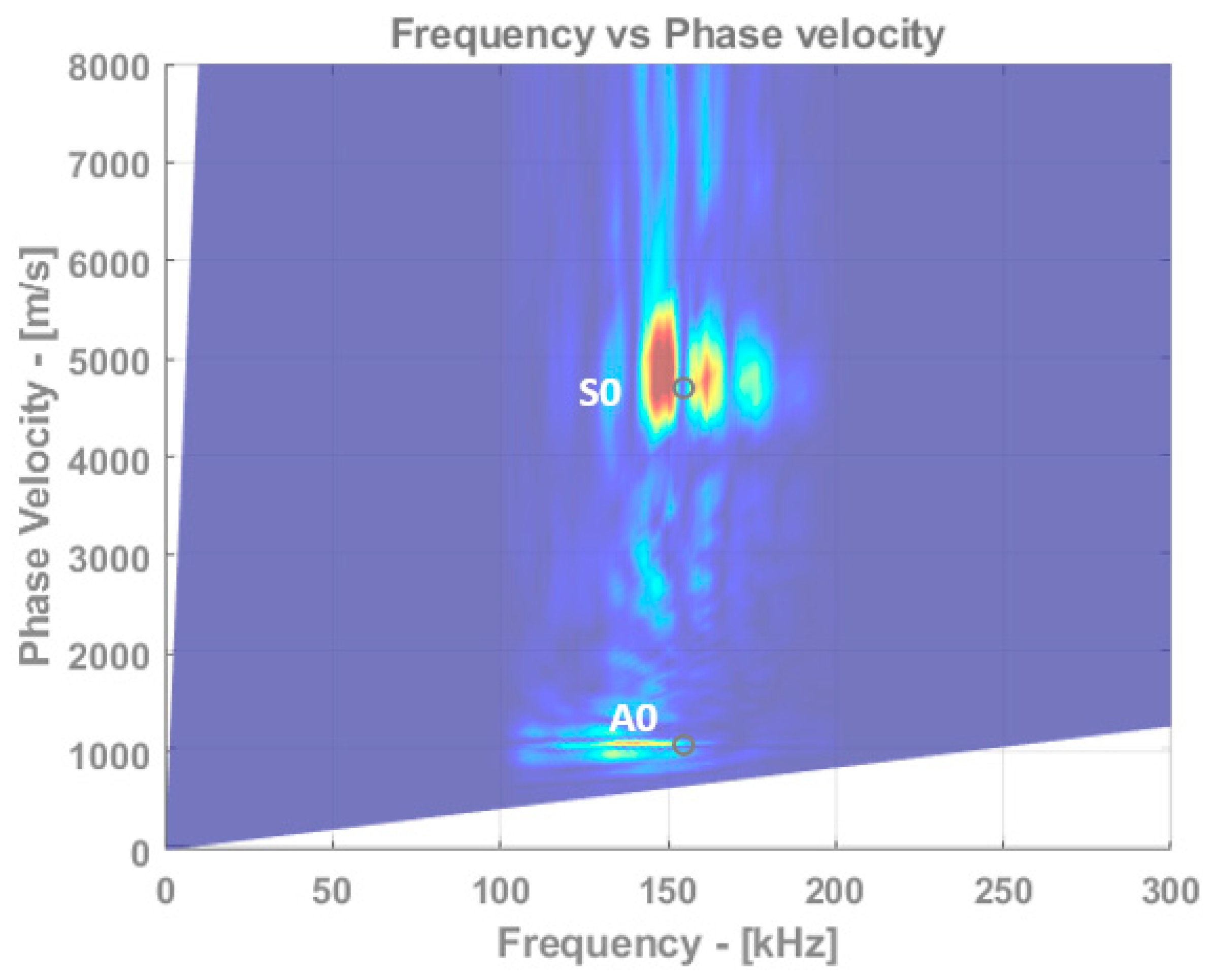
2.2. Guided Wave Dispersion Curves
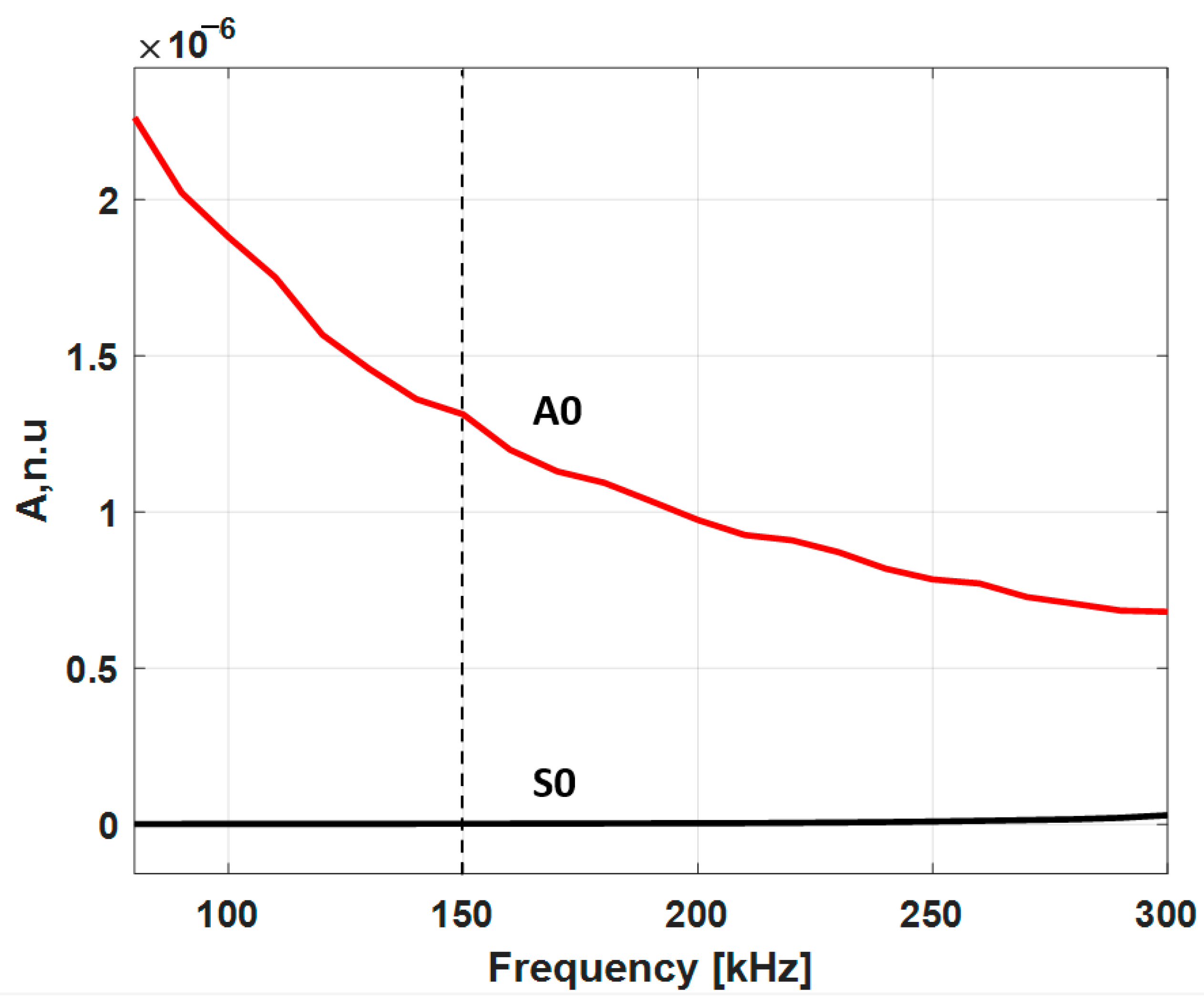
2.3. Guided Wave Frequency Tuning Curves
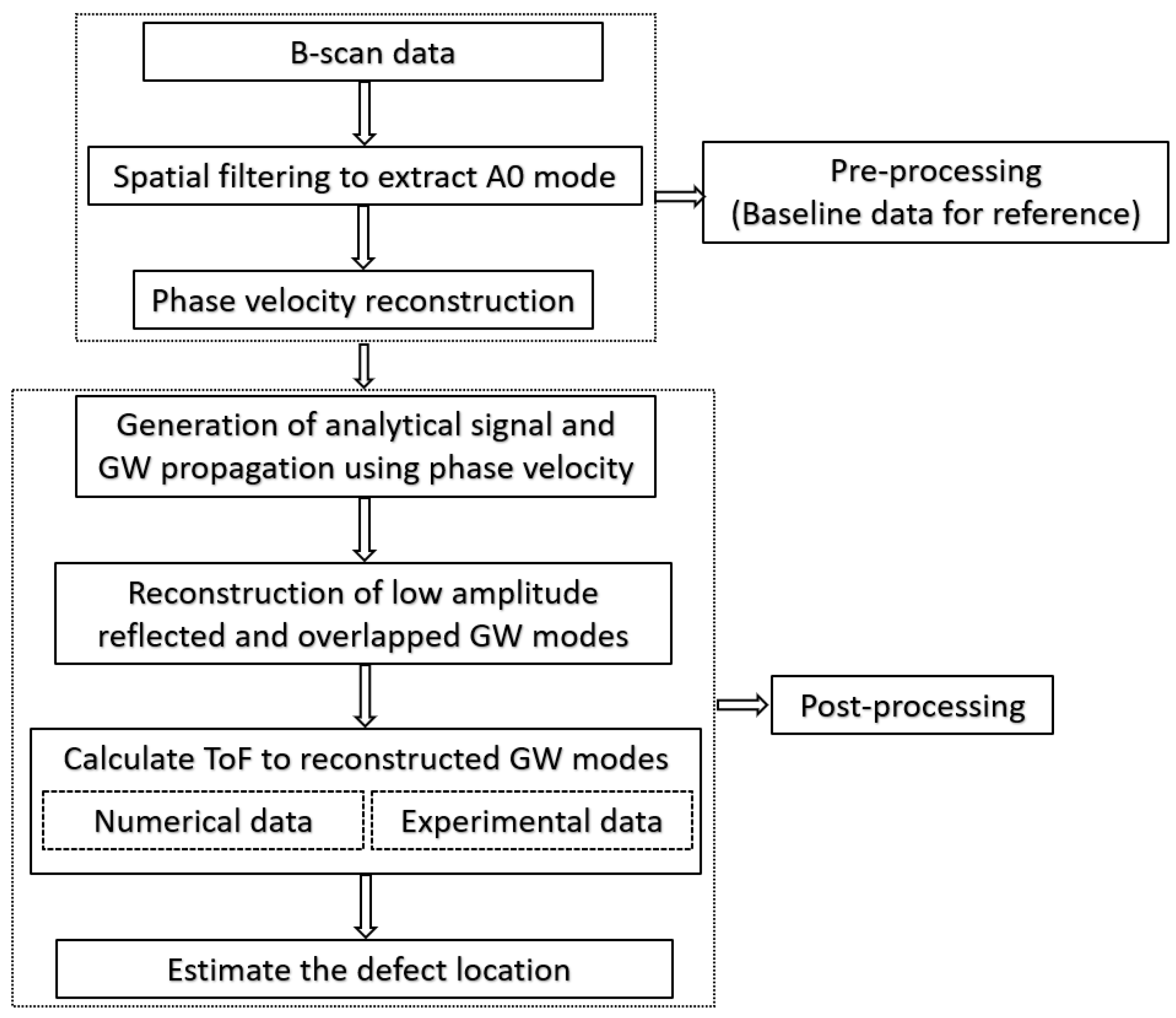
2.4. Reconstruction of GW Modes
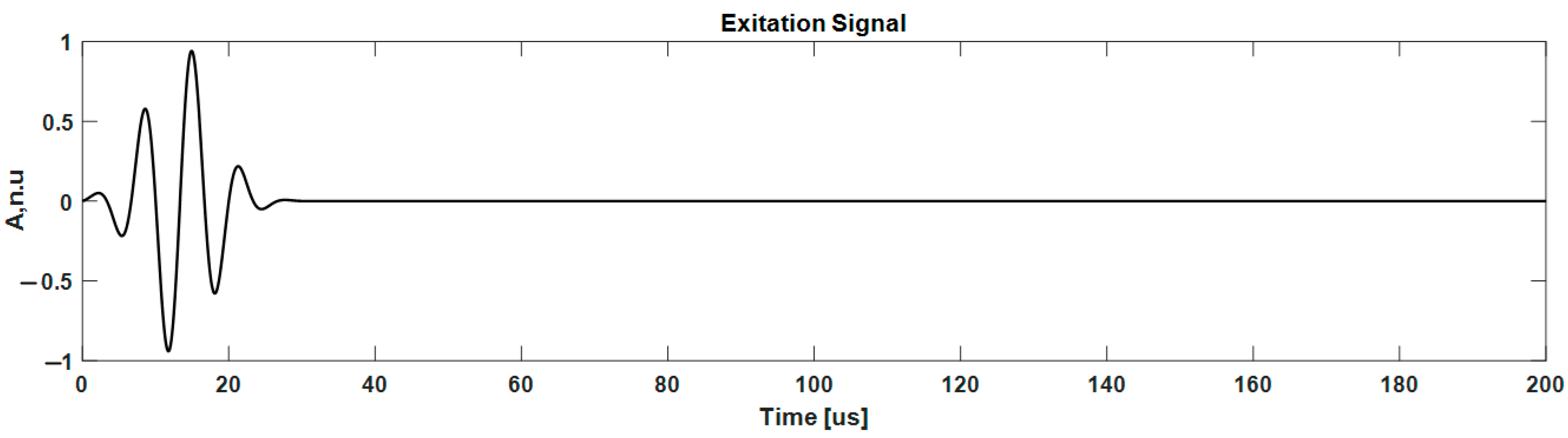
2.5. Numerical Simulation of Guided Waves
3. Results and Discussion
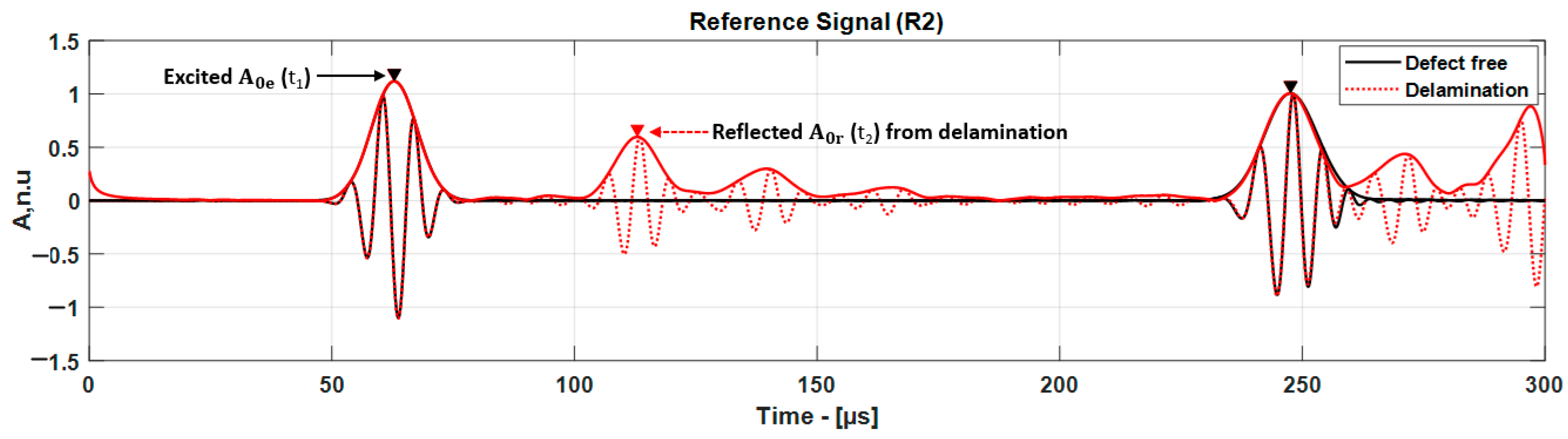
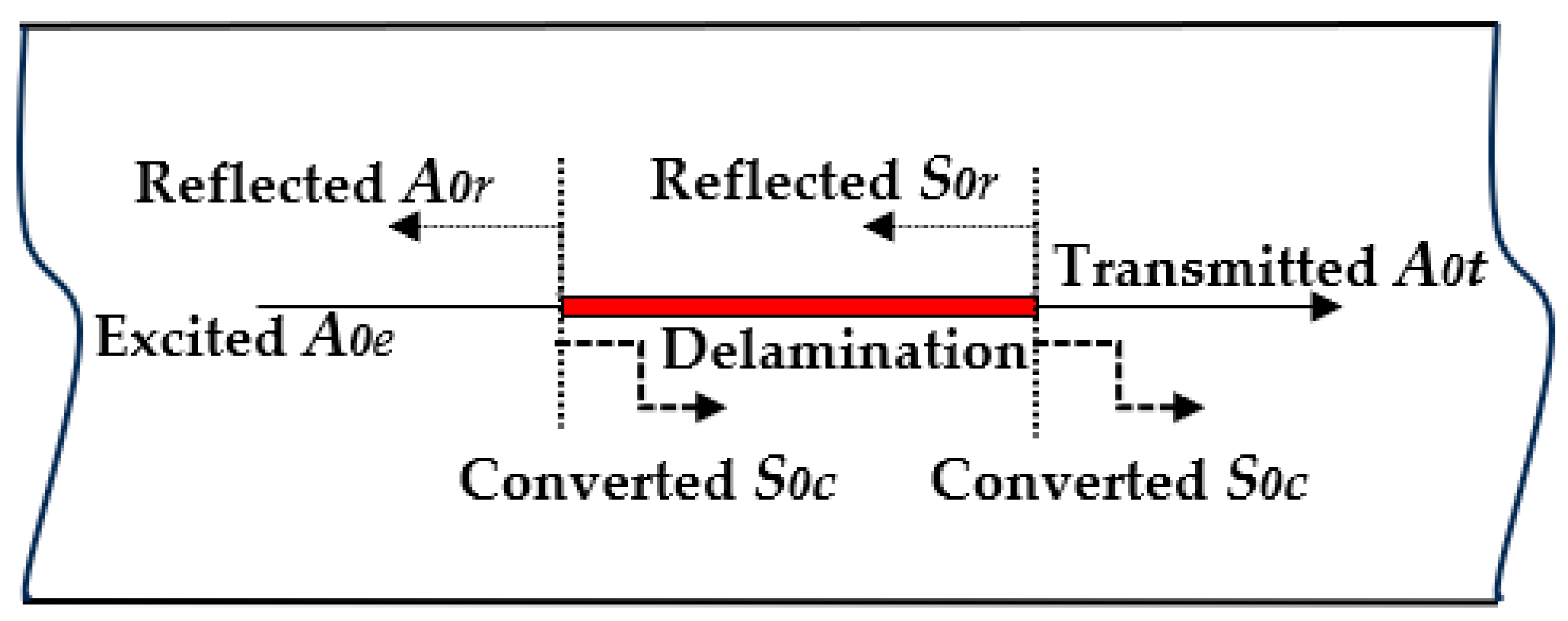
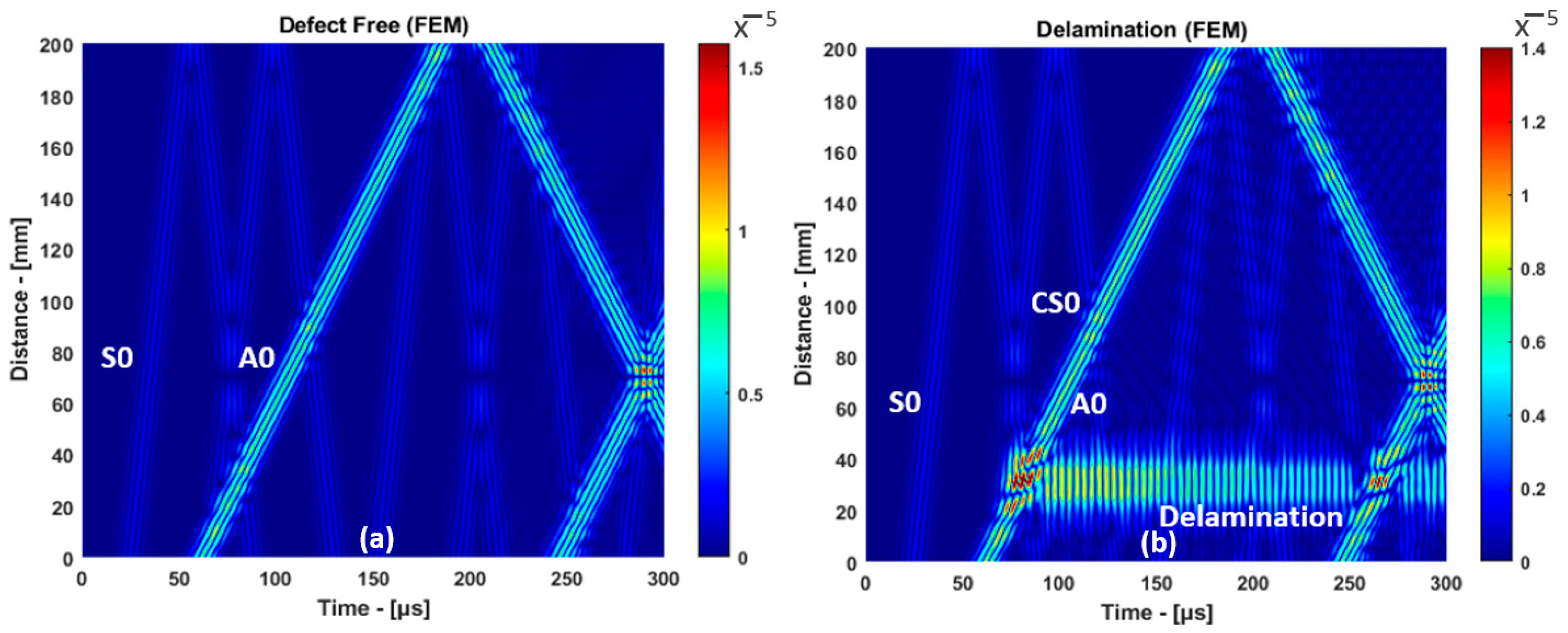
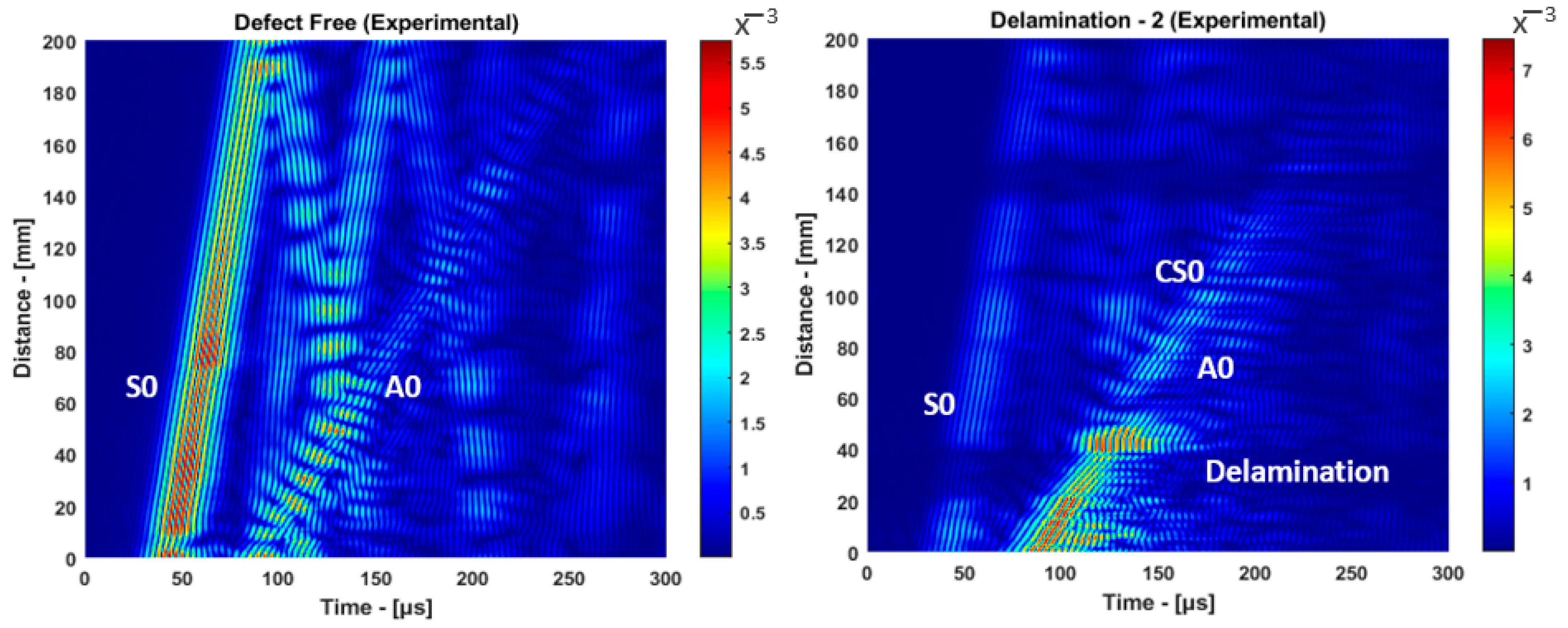
3.1. Guided Wave Interaction with Delamination
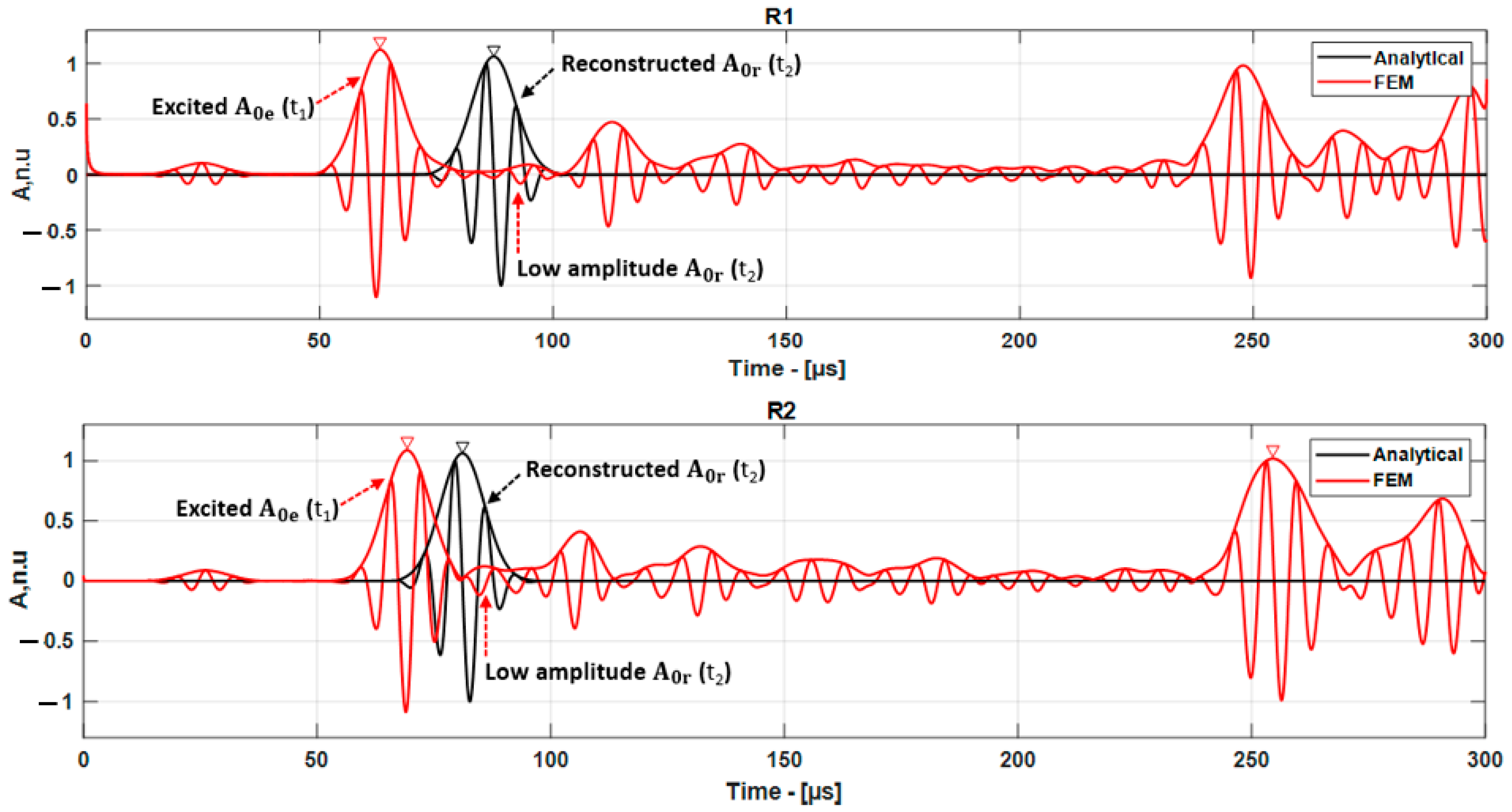
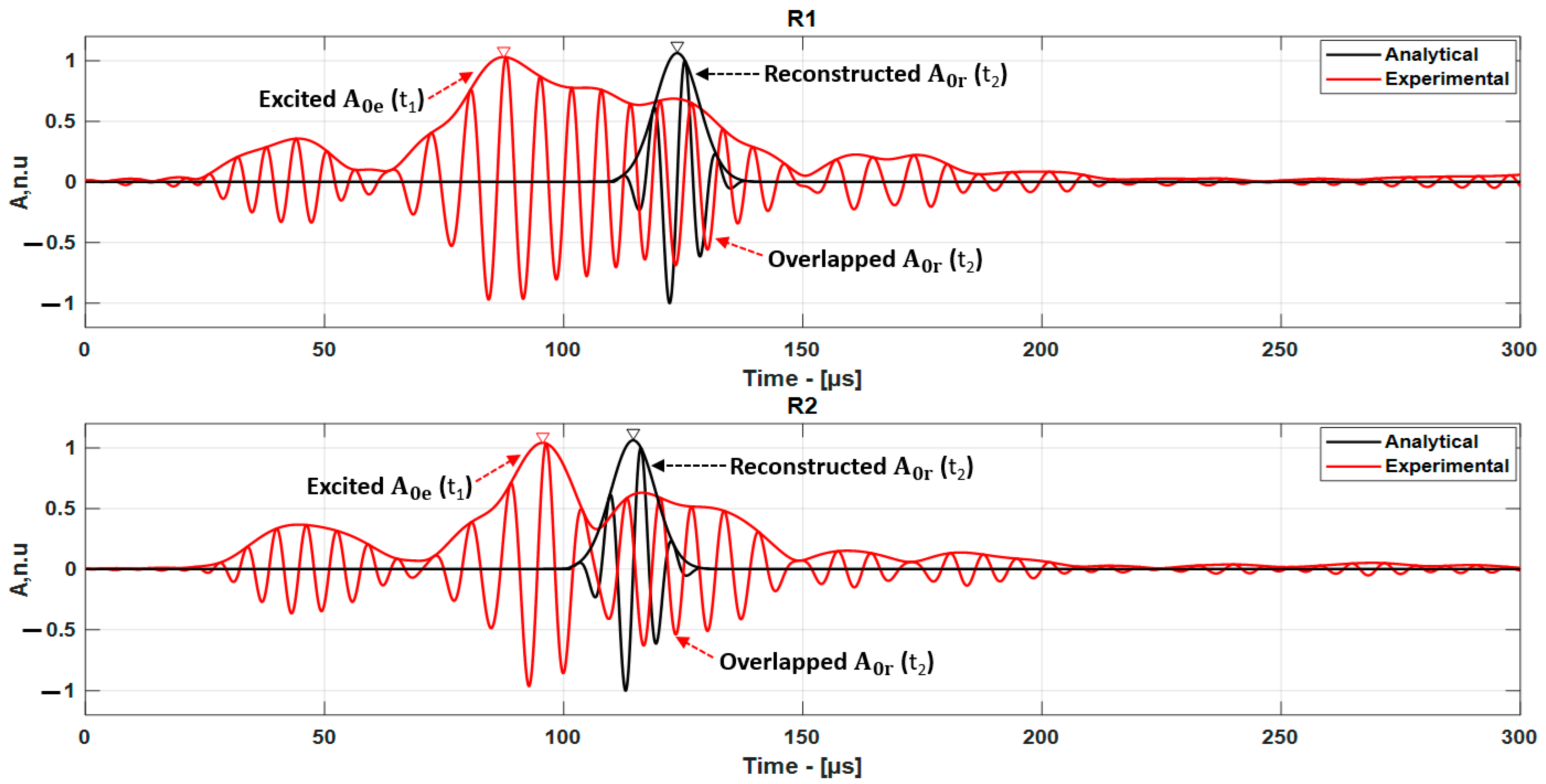
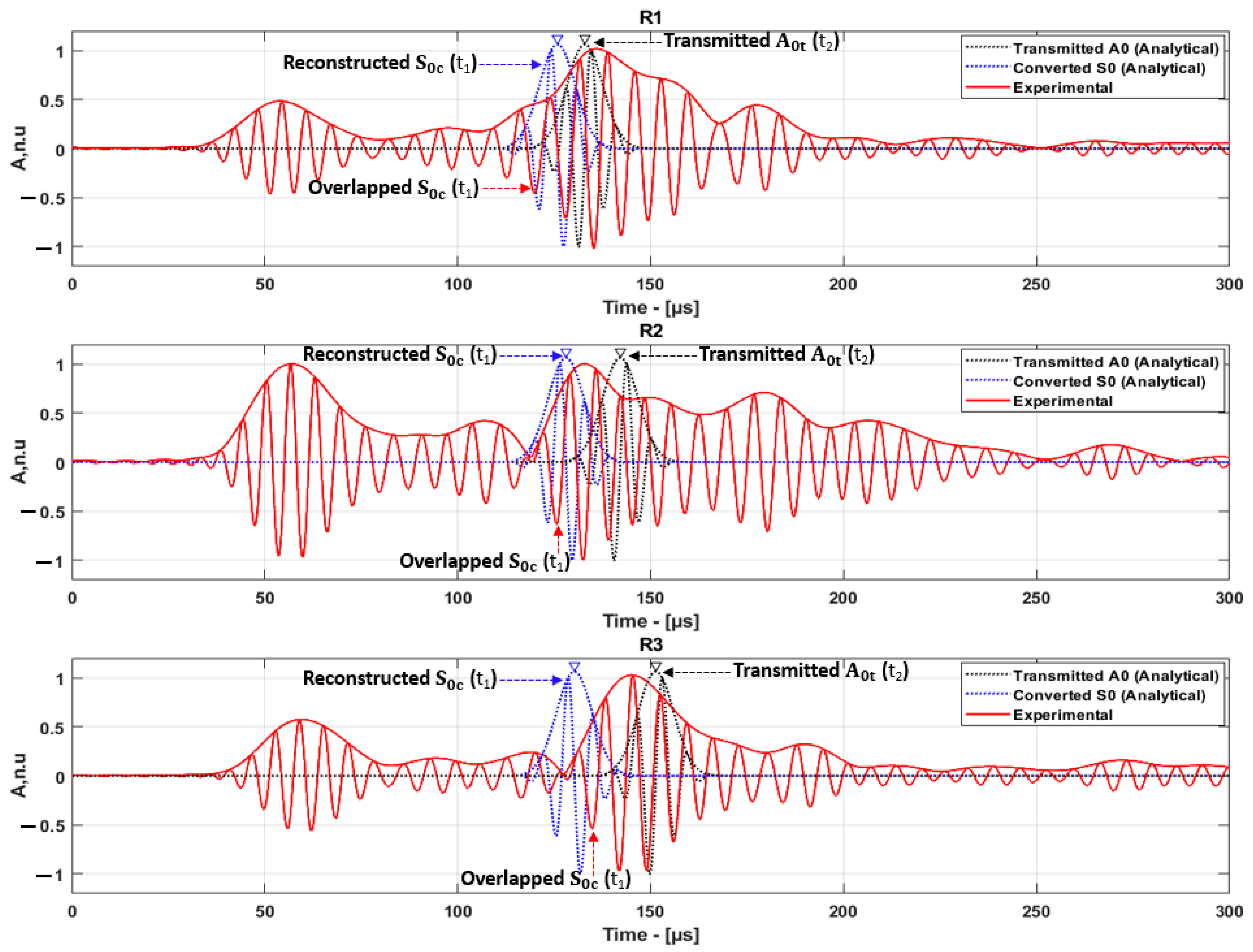
3.2. Localization of Delamination Using an Analytical Model
4. Experimental Investigation
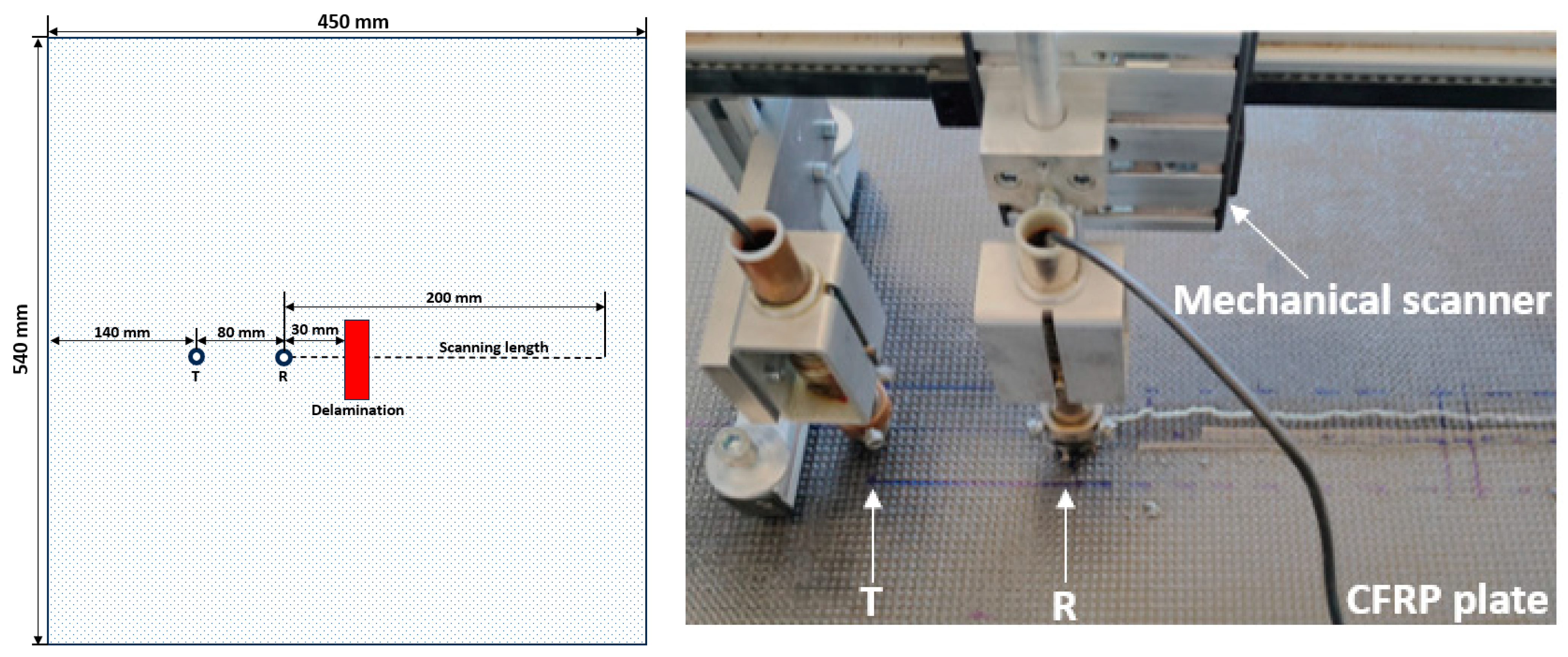
Experimental Analysis Using Contact Transducers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Parveez, B.; Kittur, M.I.; Badruddin, I.A.; Kamangar, S.; Hussien, M.; Umarfarooq, M.A. Scientific Advancements in Composite Materials for Aircraft Applications: A Review. Polymers 2022, 14, 5007. [Google Scholar]
- Dursun, T.; Soutis, C. Recent developments in advanced aircraft aluminium alloys. Mater. Des. 2014, 56, 862–871. [Google Scholar]
- Sajan, S.; Selvaraj, D.P. A review on polymer matrix composite materials and their applications. Mater. Today Proc. 2021, 47, 5493–5498. [Google Scholar]
- Trzepieciński, T.; Batu, T.; Kibrete, F.; Lemu, H.G. Application of Composite Materials for Energy Generation Devices. J. Compos. Sci. 2023, 7, 55. [Google Scholar]
- El Etri, H.; Korkmaz, M.E.; Gupta, M.K.; Gunay, M.; Xu, J. A state-of-the-art review on mechanical characteristics of different fiber metal laminates for aerospace and structural applications. Int. J. Adv. Manuf. Technol. 2022, 123, 2965–2991. [Google Scholar]
- Senthil, K.; Arockiarajan, A.; Palaninathan, R.; Santhosh, B.; Usha, K. Defects in composite structures: Its effects and prediction methods—A comprehensive review. Compos. Struct. 2013, 106, 139–149. [Google Scholar]
- Endalew, A.M.; Woo, K.; Kim, I.-G.; Choi, D.; Kim, H.-S. Buckling and delamination growth behavior of composite laminates with circular initial delamination. J. Mech. Sci. Technol. 2021, 35, 2561–2574. [Google Scholar]
- Fehri, M.; Vivet, A.; Keller, C.; Dammak, F.; Haddar, M. A characterization of the damage process under buckling load in composite reinforced by flax fibres. J. Compos. Sci. 2020, 4, 85. [Google Scholar]
- Suriani, M.J.; Rapi, H.Z.; Ilyas, R.A.; Petrů, M.; Sapuan, S.M. Delamination and Manufacturing Defects in Natural Fiber-Reinforced Hybrid Composite: A Review. Polymers 2021, 13, 1323. [Google Scholar] [CrossRef]
- Fu, Y.; Yao, X. A review on manufacturing defects and their detection of fiber reinforced resin matrix composites. Compos. Part C Open Access 2022, 8, 100276. [Google Scholar]
- Samaitis, V.; Jasiūnienė, E.; Packo, P.; Smagulova, D. Structural Health Monitoring Damage Detection Systems for Aerospace; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 1–3. [Google Scholar]
- Hervin, F.; Fromme, P. Anisotropy influence on guided wave scattering for composite structure monitoring. Struct. Health Monit. 2022, 22, 2626–2640. [Google Scholar] [CrossRef]
- Yang, K.; Kim, S.; Harley, J.B. Guidelines for effective unsupervised guided wave compression and denoising in long-term guided wave structural health monitoring. Struct. Health Monit. 2022, 22, 2516–2530. [Google Scholar] [CrossRef]
- Yang, Z.; Yang, H.; Tian, T.; Deng, D.; Hu, M.; Ma, J.; Gao, D.; Zhang, J.; Ma, S.; Yang, L.; et al. A review on guided-ultrasonic-wave-based structural health monitoring: From fundamental theory to machine learning techniques. Ultrasonics 2023, 133, 107014. [Google Scholar] [CrossRef]
- Draudvilienė, L.; Meškuotienė, A.; Raišutis, R.; Griškevičius, P.; Stasiškienė, Ž.; Žukauskas, E. The Usefulness and Limitations of Ultrasonic Lamb Waves in Preventing the Failure of the Wind Turbine Blades. Appl. Sci. 2022, 12, 1773. [Google Scholar] [CrossRef]
- Giannakeas, I.N.; Khodaei, Z.S.; Aliabadi, M.H. An up-scaling temperature compensation framework for guided wave–based structural health monitoring in large composite structures. Struct. Health Monit. 2022, 22, 777–798. [Google Scholar] [CrossRef]
- Chai, Y.; Wang, Y.; Liu, Q.; Qing, X. Structural health dynamic monitoring for gear transmission based on guided waves. Smart Mater. Struct. 2023, 32, 035025. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z. Lamb wave Structural Health Monitoring Using a Hybrid PZT-Laser Vibrometer Approach. Struct. Health Monit. 2013, 12, 469–483. [Google Scholar] [CrossRef]
- Ju, M.; Dou, Z.; Li, J.-W.; Qiu, X.; Shen, B.; Zhang, D.; Yao, F.-Z.; Gong, W.; Wang, K. Piezoelectric Materials and Sensors for Structural Health Monitoring: Fundamental Aspects, Current Status, and Future Perspectives. Sensors 2023, 23, 543. [Google Scholar] [CrossRef]
- Tang, L.; Li, Y.; Bao, Q.; Hu, W.; Wang, Q.; Su, Z.; Yue, D. Quantitative identification of damage in composite structures using sparse sensor arrays and multi-domain-feature fusion of guided waves. Measurement 2023, 208, 112482. [Google Scholar] [CrossRef]
- Liu, Y.; Hong, X.; Zhang, B. Contact delamination detection of anisotropic composite plates using non-elliptical probability imaging of nonlinear ultrasonic guided waves. Struct. Health Monit. 2022, 22, 276–295. [Google Scholar] [CrossRef]
- Muñoz, C.Q.G.; Marquez, F.P.G.; Crespo, B.H.; Makaya, K. Structural health monitoring for delamination detection and location in wind turbine blades employing guided waves. Wind Energy 2019, 22, 698–711. [Google Scholar] [CrossRef]
- Bouzid, O.M.; Tian, G.Y.; Cumanan, K.; Moore, D. Structural Health Monitoring of Wind Turbine Blades: Acoustic Source Localization Using Wireless Sensor Networks. J. Sens. 2015, 2015, 139695. [Google Scholar] [CrossRef]
- Ha, S.; Lonkar, K.; Mittal, A.; Chang, F.-K. Adhesive Layer Effects on PZT-induced Lamb Waves at Elevated Temperatures. Struct. Health Monit. 2010, 9, 247–256. [Google Scholar] [CrossRef]
- Thielicke, B.; Gesang, T.; Wierach, P. Reliability of piezoceramic patch sensors under cyclic mechanical loading. Smart Mater. Struct. 2003, 12, 993–996. [Google Scholar] [CrossRef]
- Salmanpour, M.S.; Khodaei, Z.S.; Aliabadi, M.H. Airborne Transducer Integrity under Operational Environment for Structural Health Monitoring. Sensors 2016, 16, 2110. [Google Scholar] [CrossRef]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 105, 106114. [Google Scholar] [CrossRef]
- Yang, K.; Kim, S.; Yue, R.; Yue, H.; Harley, J.B. Long-term guided wave structural health monitoring in an uncontrolled environment through long short-term principal component analysis. Struct. Health Monit. 2021, 21, 1501–1517. [Google Scholar] [CrossRef]
- Sofi, T.; Gude, M.R.; Wierach, P.; Martin, I.; Lorenzo, E. An Efficient Procedure for Bonding Piezoelectric Transducers to Thermoplastic Composite Structures for SHM Application and Its Durability in Aeronautical Environmental Conditions. Sensors 2023, 23, 4784. [Google Scholar] [CrossRef]
- Ma, C.-C.M.; Yur, S.-W. Environmental Effect on the Water Absorption and Mechanical Properties of Carbon Fiber Reinforced PPS and PEEK Composites. J. Thermoplast. Compos. Mater. 1989, 2, 281–292. [Google Scholar] [CrossRef]
- Gall, M.; Thielicke, B.; Schmidt, I. Integrity of piezoceramic patch transducers under cyclic loading at different temperatures. Smart Mater. Struct. 2009, 18, 104009. [Google Scholar] [CrossRef]
- Baid, H.; Schaal, C.; Samajder, H.; Mal, A. Dispersion of Lamb waves in a honeycomb composite sandwich panel. Ultrasonics 2015, 56, 409–416. [Google Scholar] [CrossRef]
- Putkis, O.; Dalton, R.; Croxford, A. The anisotropic propagation of ultrasonic guided waves in composite materials and implications for practical applications. Ultrasonics 2016, 65, 390–399. [Google Scholar] [CrossRef]
- Mustapha, S.; Ye, L. Leaky and non-leaky behaviours of guided waves in CF/EP sandwich structures. Wave Motion 2014, 51, 905–918. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, X.; Wang, Y.; Wang, Y.; Qing, X. Lamb wave-based damage imaging of CFRP composite structures using autoencoder and delay-and-sum. Compos. Struct. 2023, 303, 116263. [Google Scholar] [CrossRef]
- Zhang, H.; Lin, J.; Hua, J.; Zhang, T.; Tong, T. Attention-based interpretable prototypical network towards small-sample damage identification using ultrasonic guided waves. Mech. Syst. Signal Process. 2023, 188, 109990. [Google Scholar] [CrossRef]
- Panda, R.S.; Rajagopal, P.; Balasubramaniam, K. Rapid guided wave inspection of complex stiffened composite structural components using non-contact air-coupled ultrasound. Compos. Struct. 2018, 206, 247–260. [Google Scholar] [CrossRef]
- Wang, X.; He, J.; Guo, W.; Guan, X. Three-dimensional damage quantification of low velocity impact damage in thin composite plates using phased-array ultrasound. Ultrasonics 2020, 110, 106264. [Google Scholar] [CrossRef]
- Kumar, S.N.; Srikanth, K.; Subbaratnam, B.; Jena, S.P. Damage Detection in Composite Materials Using Lamb Wavemethod. IOP Conf. Ser. Mater. Sci. Eng. 2020, 998, 012066. [Google Scholar] [CrossRef]
- Eremin, A.A.; Golub, M.V.; Fomenko, S.I.; Evdokimov, A.A.; Nets, P.A. Multi-Layered and Homogenized Models for In-Plane Guided Wave Excitation, Sensing, and Scattering in Anisotropic Laminated Composites. Appl. Sci. 2023, 13, 1698. [Google Scholar] [CrossRef]
- Yu, X. Identification of Damage in Composite Structures Based on Feature Guided Ultrasonic Waves. Ph.D. Thesis, Nanyang Technological University, Singapore, 2018. [Google Scholar]
- Feng, T.; Khodaei, Z.S.; Aliabadi, M.H.F. Influence of Composite Thickness on Ultrasonic Guided Wave Propagation for Damage Detection. Sensors 2022, 22, 7799. [Google Scholar] [CrossRef]
- Lugovtsova, Y.; Bulling, J.; Boller, C.; Prager, J. Analysis of Guided Wave Propagation in a Multi-Layered Structure in View of Structural Health Monitoring. Appl. Sci. 2019, 9, 4600. [Google Scholar] [CrossRef]
- Sikdar, S.; Banerjee, S. Guided wave based nondestructive analysis of localized inhomogeneity effects in an advanced sandwich composite structure. Compos. Part B Eng. 2019, 176, 107195. [Google Scholar] [CrossRef]
- Papanaboina, M.R.; Jasiuniene, E.; Žukauskas, E.; Mažeika, L. Numerical Analysis of Guided Waves to Improve Damage Detection and Localization in Multilayered CFRP Panel. Materials 2022, 15, 3466. [Google Scholar] [CrossRef]
- Samaitis, V.; Mažeika, L. Guided Wave Phase Velocity Dispersion Reconstruction Based on Enhanced Phased Spectrum Method. Materials 2022, 15, 1614. [Google Scholar] [CrossRef]
- Raišutis, R.; Tiwari, K.A.; Žukauskas, E.; Tumšys, O.; Draudvilienė, L. A Novel Defect Estimation Approach in Wind Turbine Blades Based on Phase Velocity Variation of Ultrasonic Guided Waves. Sensors 2021, 21, 4879. [Google Scholar] [CrossRef]
- Tao, C.; Ji, H.; Qiu, J.; Zhang, C.; Wang, Z.; Yao, W. Characterization of fatigue damages in composite laminates using Lamb wave velocity and prediction of residual life. Compos. Struct. 2017, 166, 219–228. [Google Scholar] [CrossRef]
- Rosalie, S.C.; Chiu, W.K.; Chan, A.; Rose, F.; Rajic, N. Ultrasonic tomographic reconstruction for damage detection in aluminium and glare plate-like structures. Aust. J. Mech. Eng. 2006, 3, 39–44. [Google Scholar] [CrossRef]
- Angrisani, L.; Moriello, R.S.L. Estimating ultrasonic time-of-flight through quadrature demodulation. IEEE Trans. Instrum. Meas. 2006, 55, 54–62. [Google Scholar] [CrossRef]
- Fang, Z.; Su, R.; Hu, L.; Fu, X. A simple and easy-implemented time-of-flight determination method for liquid ultrasonic flow meters based on ultrasonic signal onset detection and multiple-zero-crossing technique. Measurement 2020, 168, 108398. [Google Scholar] [CrossRef]
- Fang, Z.; Hu, L.; Mao, K.; Chen, W.; Fu, X. Similarity Judgment-Based Double-Threshold Method for Time-of-Flight Determination in an Ultrasonic Gas Flowmeter. IEEE Trans. Instrum. Meas. 2017, 67, 24–32. [Google Scholar] [CrossRef]
- Shin, D.; Kim, H.; Lee, J. Numerical analysis of the damage behavior of an aluminum/CFRP hybrid beam under three point bending. Compos. Part B Eng. 2013, 56, 397–407. [Google Scholar] [CrossRef]
- Kim, Y.A.; Woo, K.; Cho, H.; Kim, I.-G.; Kim, J.-H. High-Velocity Impact Damage Behavior of Carbon/Epoxy Composite Laminates. Int. J. Aeronaut. Space Sci. 2015, 16, 190–205. [Google Scholar] [CrossRef]
- Woo, K.; Kim, I.-G.; Kim, J.H.; Cairns, D.S. Numerical Simulation of High Velocity Impact of Circular Composite Laminates. Int. J. Aeronaut. Space Sci. 2017, 18, 236–244. [Google Scholar] [CrossRef]
- Han, L.; Dai, L. Three-dimensional shear and compressional wave propagation of multiple point sources in fluid-saturated elastic porous media. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2013, 228, 3–18. [Google Scholar] [CrossRef]
- Papanaboina, M.R.; Jasiuniene, E. The defect identification and localization using ultrasonic guided waves in aluminum alloy. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; pp. 490–493. [Google Scholar]
- Asokkumar, A.; Venkat, R.S.; Boller, C. Identification of Key Performance Indicators for SHM in Structures of Increasing Complexity Based on Artificial Neural Networks. In Proceedings of the 11th International Symposium on NDT in Aerospace, Paris, France, 13–15 November 2019. e-Journal of Nondestructive. [Google Scholar]
- Ma, Z.; Yu, L. Lamb wave imaging with actuator network for damage quantificationin aluminum plate structures. J. Intell. Mater. Syst. Struct. 2021, 32, 182–195. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Units | Value | |
|---|---|---|---|
| Density | ρc | kg/m3 | 1544 |
| Thickness | tply | mm | 0.194 |
| Young’s modulus | E1 | GPa | 131 |
| E2 = E3 | GPa | 8 | |
| Shear modulus | G12 = G13 | GPa | 4.5 |
| G23 | GPa | 3.5 | |
| Poisson’s ratio | ν12 = ν13 | - | 0.29 |
| ν23 | - | 0.47 |
| Case | Delamination Position (Xd) (mm) | Distance between Edge of the Sample and Receiver (Xr) (mm) | Distance between Delamination and Receiver (Xdr) (mm) |
|---|---|---|---|
| 1-1 | 250 | 230 | 20 |
| 1-2 | 250 | 240 | 10 |
| 2-1 | 250 | 280 | 10 |
| 2-2 | 250 | 290 | 20 |
| 2-3 | 250 | 300 | 30 |
| Case | Receiver | Distance from Delamination to Receiver (mm) | Propagation Time t2 – t1 (µs) | ToF (dt) (µs) | Estimated Distance (mm) | Absolute Error |
|---|---|---|---|---|---|---|
| 1-1 | R1 | 20 | 87.2 − 62.8 | 24.4 | 19.8 | 0.2 |
| 1-2 | R2 | 10 | 81.1 − 69.2 | 11.9 | 9.6 | 0.4 |
| Case | Receiver | Distance from Delamination to Receiver (mm) | Propagation Time t2 – t1 (µs) | ToF (dt) (µs) | Estimated Distance (mm) | Absolute Error |
|---|---|---|---|---|---|---|
| 2-1 | R1 | 10 | 92.4 − 88.4 | 4 | 6.4 | 3.6 |
| 2-2 | R2 | 20 | 99.5 − 89.4 | 10.1 | 16.3 | 3.7 |
| 2-3 | R3 | 30 | 105.6 − 91.1 | 14.5 | 23.5 | 6.5 |
| Case | Receiver | Distance from Delamination to Receiver (mm) | Propagation Time t2 − t1 (µs) | ToF (dt) (µs) | Estimated Distance (mm) | Absolute Error |
|---|---|---|---|---|---|---|
| 1-2 | R1 | 20 | 123.7 − 87.4 | 36.3 | 19.7 | 0.3 |
| 1-3 | R2 | 10 | 114.5 − 95.6 | 18.9 | 10.2 | 0.2 |
| Case | Receiver | Distance from Delamination to Receiver (mm) | Propagation Time t2 − t1 (µs) | ToF (dt) (µs) | Estimated Distance (mm) | Absolute Error |
|---|---|---|---|---|---|---|
| 2-1 | R1 | 10 | 136 − 125.8 | 10.2 | 11 | 0.8 |
| 2-2 | R2 | 20 | 142.1 − 128 | 14.1 | 15.3 | 4.7 |
| 2-3 | R3 | 30 | 151.3 − 130.2 | 21.1 | 22.9 | 7.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papanaboina, M.R.; Jasiuniene, E.; Samaitis, V.; Mažeika, L.; Griškevičius, P. Delamination Localization in Multilayered CFRP Panel Based on Reconstruction of Guided Wave Modes. Appl. Sci. 2023, 13, 9687. https://doi.org/10.3390/app13179687
Papanaboina MR, Jasiuniene E, Samaitis V, Mažeika L, Griškevičius P. Delamination Localization in Multilayered CFRP Panel Based on Reconstruction of Guided Wave Modes. Applied Sciences. 2023; 13(17):9687. https://doi.org/10.3390/app13179687
Chicago/Turabian StylePapanaboina, Mastan Raja, Elena Jasiuniene, Vykintas Samaitis, Liudas Mažeika, and Paulius Griškevičius. 2023. "Delamination Localization in Multilayered CFRP Panel Based on Reconstruction of Guided Wave Modes" Applied Sciences 13, no. 17: 9687. https://doi.org/10.3390/app13179687