1. Introduction
This paper describes the design and implementation of an industrial safety system based on the Alexa voice assistant for a three-phase motor’s ignition and rotation change. The interest in voice assistants has been increasing due to their functionality, scope of applications, and ease use. Ref. [
1] proposed to control a computer with a voice assistant, based in Python. This work is oriented towards improving the computer–human interaction, but not in an industrial environment. Studies and research have been conducted on applying voice assistants in the industrial area [
2]. Talking about Industry 4.0 and its technologies allows thinking about a new form of interaction between humans and machines within an industrial environment, as is the case of intelligent voice assistants, where user voice commands can be recognized, understood, and processed to give a response based on a request [
3,
4], allowing us to achieve a more collaborative and familiar environment, since more natural communication typical of human beings will allow more efficient and understandable interactions. In this way, ref. [
5] researched the needs, requirements, and expectations of the use of voice assistants in industrial equipment maintenance for future technological implementation.
In industry, the development of these applications is increasing the trend to eliminate screens and keyboards, allowing the operator to have both hands free to engage in other activities while giving orders to the production system [
4,
6]. In [
2], the authors propose an industrial voice assistant based in Raspberry Pi3 integrated into an industrial modular architecture system to compare results achieved from the actual process with a virtual digital twin of the system. Still, in this case, the proposed solution only works in a noise-free environment. Others applications of assistants have been found, such as the implementation of a voice assistant, based in Google, with the help of the IoT to replicate an industrial process in which two variables must be controlled in real time, temperature and humidity, and this is achieved with the help of an ESP8266 microcontroller, which powers up and holds the actuator, which is not mentioned in the work [
7]. The Alexa voice assistant was connected to a LOGO PLC through a Raspberry PI that controlled a frequency variator to control the speed of an industrial AC motor [
8]. In [
9], the industry does not use voice assistants as operator helpers. The author uses Alexa and Raspberry Pi to interact with a PLC to determine the status of its inputs and outputs and production reports. All the aforementioned works use Raspberry Pi as an interface between the voice assistant and the industrial equipment. Still, the operating system and the industrial equipment may also crash. In addition, the Alexa voice assistant for interaction with an industrial robotic arm using a cloud database DynamoDB through client/server communication was mentioned in [
10]. The system is fully proprietary and not open to improvement.
In industrial maintenance, ref. [
11] has created a voice assistant with augmented reality to provide assistance and guidance to operators to care for the end effector of a robot through a database without interaction, while ref. [
12] worked on prototyping a voice assistant to maintain a milling machine using a mobile device. Research in quality control [
3] developed an intelligent assistant for the essential process of quality control of parts with colors applied by a robotic arm through the integration of three technologies: voice assistant, artificial vision, and Internet of Things. It should be noted that within all the studies, it has been commonly found that the limitations of the application of voice assistants in industry are a product of factors that directly affect the process of voice command recognition and processing [
1]. Among them are speed of speech, technical language learning, ambient noise, externalization of plant data, and variation in accents.
The security of the voice assistant’s interaction with the user is critical to the system’s functionality. In this way, ref. [
13] studied security problems using voice assistants in different applications. This work gives us the key to implement a voice password to activate our system for increasing assignment security as a proposal.
This paper presents a system that uses the Alexa voice assistant to monitor three variables of a three-phase motor: current in each phase, housing temperature, and motor vibrations. The system also allows us to obtain alert notifications in the case of existing abnormal values in any of the three variables. The gap in this proposed system is controlling the ignition, shutdown, and changing the rotation of the industrial motor before a password introduction. The operating variables measure user information with the voice assistant Alexa.
2. Design
This system operates on an Alexa skill designed on the VoiceFlow platform. The skill is transferred to Amazon’s development platform, allowing its use in any Alexa device. This system has 11 functionalities, detailed below, which have different variations in the responses delivered to the user.
Start clockwise motor: Starting the motor clockwise with a prior password.
Start counterclockwise motor: Responsible for starting the motor counterclockwise with a previous password.
Key request: Checks the recognition of the password used to start up the motor.
Turn off motor: Turn off the motor.
Line 1 current: Reporting the RMS current on line 1.
Line 2 current: Reporting the RMS current on line 2.
Line 3 current: Reporting the RMS current on line 3.
Motor temperature: Reporting the temperature in the area near the motor.
Motor Vibration: Reporting motor level vibration value of the motor.
Help request: In this function, the wizard explains to the user all the tasks that can be performed.
Unidentified request: If the voice assistant cannot recognize what the user has said, this function is the point of requesting the user to make a new request due to existing problems.
2.1. Hardware
For the proposed system, commercial Tuya Smart devices, Arduino sense modules, and an ESP32 microcontroller are used to turn on and off the motor, measure the current in each power supply line, and measure the temperature near the motor area and the vibration level of the engine. Tuya Smart devices are chosen since this manufacturer offers a cloud platform for developing IoT projects, and its devices are Alexa-compatible.
In the case of power on, power off, and rotation change of the motor, smart WiFi relays compatible with Amazon Alexa are used. These devices are characterized by their use in loads up to 10 A. They activate electromechanical relays, which activate three-phase contactors to turn on, turn off, or perform motor turn changes. Mechanical relays protect intelligent devices, meaning that the WiFi relays do not activate the contactors directly.
Figure 1 shows the components discussed above.
To measure the motor housing temperature, a temperature and humidity sensor developed by Tuya Smart and compatible with Amazon Alexa was used, which can be configured and reviewed with the Tuya Smart mobile application and the IoT platform in the cloud. It should be noted that the above devices only work with a connection to a 2.4 GHz WiFi network.
The ACS712ELCTR-05B-T module (hall effect current sensor) is used with the ESP32 microcontroller board to measure the current value in each motor phase. This module sends the measured values to the Blynk platform so that they can be accessed with the VoiceFlow platform, where the skill of this system was programmed. Due to the proposed application, the ACS712ELCTR-05B-T model has been selected, which measures up to ±5 A current. Regarding vibrations, the ADXL345 module analyzed the movements in three axes. When exceeding a specific user tolerance, the module will show that the motor operates under abnormal conditions, as the current module works with the ESP32 board.
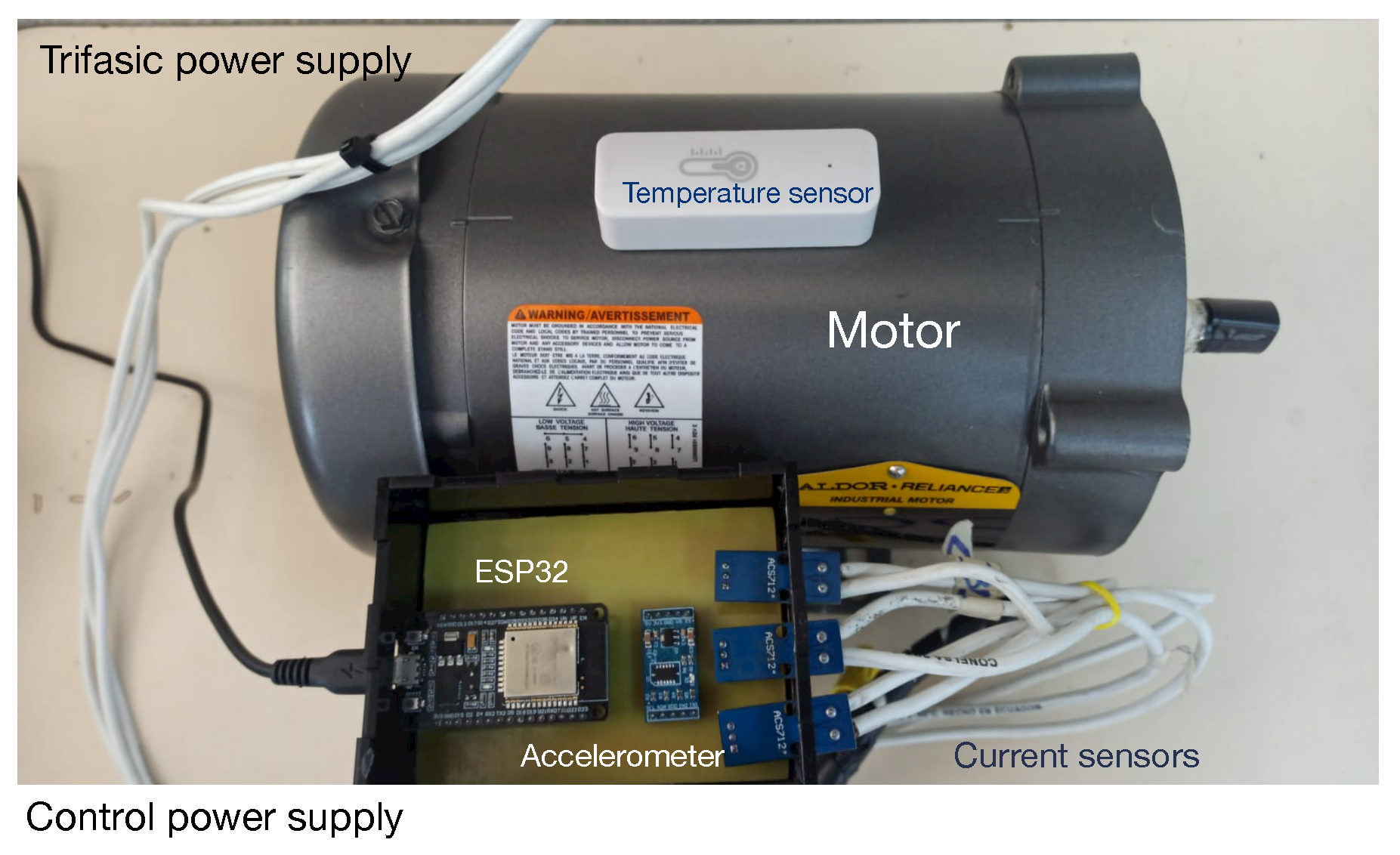
Figure 2 shows the PCB board developed for the existing vibration modules and the ESP32.
Figure 2 also shows the temperature module located above the motor.
2.2. Software
For the motor current and vibration sensing, an Arduino program is developed. The current and vibration information obtained is sent to the Blynk server for storage and subsequent access from the Alexa skill. Meanwhile, for the temperature sensor and intelligent relays, a Node-Red system is implemented to read and write to the devices by accessing the cloud services of the Tuya Smart IoT platform.
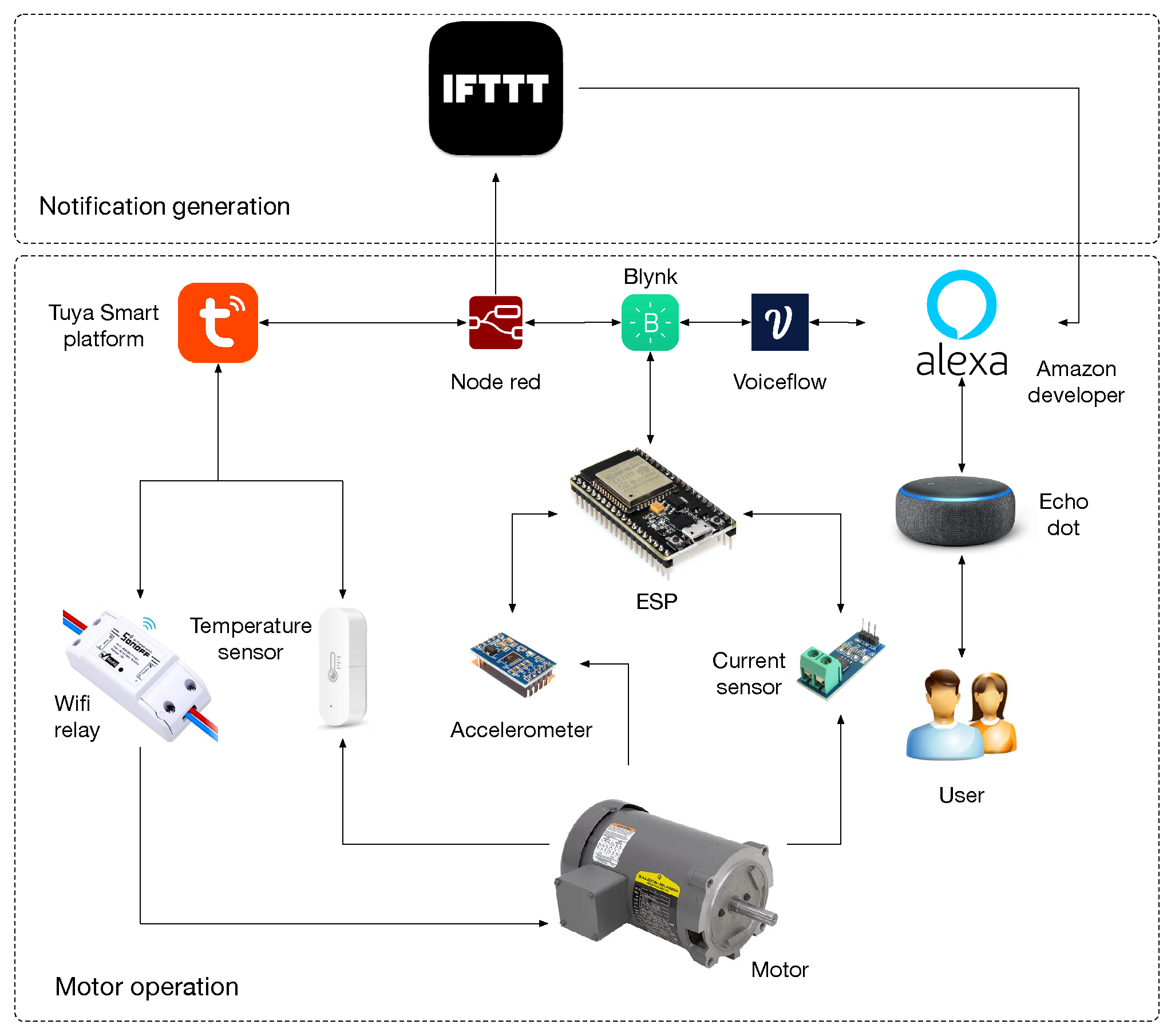
Figure 3 shows the general scheme of the system connection. First, the user communicates with the Alexa device with voice commands, and then the device, through Amazon services, connects with Voiceflow, where the skill programming is performed. This also connects with Blynk, responsible for obtaining data from Arduino devices through the ESP32 microcontroller. Similarly, the devices (temperature sensor and WiFi relays) are linked to the Tuya Smart platform, which is connected to Node-Red to communicate with Blynk and integrate all devices to provide the necessary information to Voiceflow so that it can execute the commands requested by the user. Regarding notifications, IFTTT is used as a bridge to activate an Alexa routine in the event of abnormal situations.
2.3. Current Process Signal
As a first instance, for current processing, a calibration algorithm was developed for the sensor in the ESP32 microcontroller, where the digital value is delivered when the sensor is measuring 0 amperes.
Figure 4A shows the diagram of this calibration algorithm. This algorithm takes 1000 digital instant values from the sensor when measuring 0 amperes. Then, the smallest value of these is chosen to have the reference of the initial sensor value.
Once the sensors are calibrated, we continue with another algorithm to transform the digital values into current. This algorithm is presented in
Figure 4B. The algorithm starts with a capture of 1000 digital values and their average is obtained (these values are taken to increase the measure precision). Then, the averaged value is subtracted from the digital value of the sensor in 0 amperes (calibration value). The digital value is converted into voltage by multiplying it by the resolution of the ESP32, which in this case is 0.805. The voltage value is converted into amperes by dividing the value by 185. This value is obtained from the sensor datasheet. Finally, the result is divided by 1.4 (square root of 2 for RMS) to obtain the effective current.
2.4. Accelerometer Signal Processing
As the first point of this part, a configuration algorithm is developed for the sensor, in which the initial values of the accelerometer are obtained when it is static to have reference.
Figure 5A shows the diagram of this algorithm. In this algorithm, 1000 data points are taken for each of the accelerometer axes (for more precision) and then averaged to obtain the initial value. Once this initial value is received, we continue with an algorithm for identifying anomalous vibration values, as shown in
Figure 5B. In this algorithm, the first step is to take the current value of the sensor in the three axes and then determine if these values are within the maximum range, which is ±1 of the default value. In this case, the value is considered normal.
If any value of the axes is out of the normal range, a failure counter is incremented, and when it becomes equal to the failure value, the system will send an alert signal to Blynk. Otherwise, a false alarm counter will be incremented, and when it becomes equal to the false alarm value, all counters will be reset.
The default vibration data are obtained when the engine is off to determine the standard vibration value. Then, vibration data are taken when the engine is idle, and the machine has a non-uniform load (axis mechanical perturbation) to determine any vibration.
2.5. Tuya Smart Devices
The manufacturer of smart devices, “Tuya Smart”, allows the development of IoT projects in a cloud platform, which enables the management of smart devices. These projects have authentication keys, but an access token is needed for device management. This request needs a timestamp, URL request, authorization keys, and validation signature. The authorization keys are the client ID and project access token. The validation signature is a string composed of all the data in the above request. This request is executed in the following order: the determination and sending of the timestamp, the configuration of necessary headers, encoding of the information, sending of GET request to the Tuya IoT platform, and storage of the access token.
2.6. Intelligent Relays (WiFi Relays)
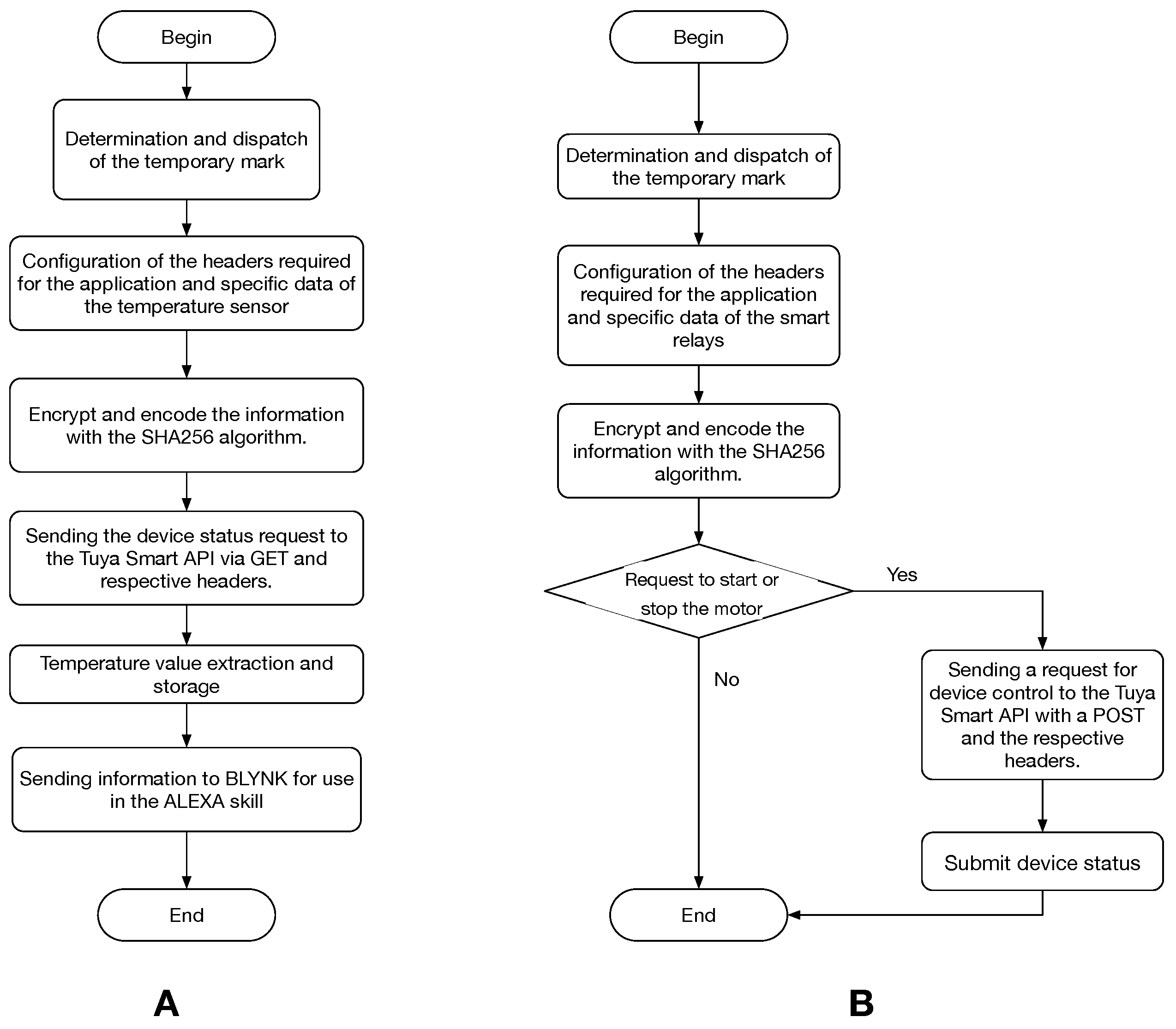
In the case of intelligent relays, a POST request is made to modify the device parameters. These devices have two parameters: code and value, the name of the relay and its status. Depending of the user’s requirement with the motor, turn on clockwise/counterclockwise or turn off, one or the other request will be made, as shown in
Figure 6B.
2.7. Temperature Sensing
Once the GET request is sent to extract the data from the intelligent temperature sensor, an object containing 15 sensor operating parameters is obtained as a response: temperature, humidity, minimum and maximum acceptable temperature/humidity limits, sensor sensitivity, time of the reports to be made, and temperature/humidity alarms. The temperature value is stored in the 0 position of the object. In this case, the value is stored in a variable of Node-Red (a platform used to manage API requests to different platforms) and then sent to Blynk and can be used from the Alexa skill.
Figure 6 explains the employment of a flowchart of the sensor temperature value reading and the smart relay’s control.
4. Discussion and Conclusions
The industrial safety system proposed is an efficient and innovative form of human–machine interaction, which agrees with what is proposed in Industry 4.0. It has an interface where the voice assistant can deliver information in a friendly way, more naturally and understandably for the human. In its programming, different variants can be added in the synthetic voice and the statements for the delivery of information. Therefore, it is possible to have pleasant conversations to ascertain process status, abnormal situations, and existing alarms with a simple voice command.
This work demonstrates that it is possible to give voice commands to an industrial machine to control it or obtain information, such as the engine’s current or temperature. In the industrial field, safety is essential. It is programmed into the Alexa skill, and the password is vocalized for the user before turning on the motor.
IoT platforms today guarantee communication mechanisms between each other to develop and implement applications in which management and transfer of information, and reading and writing data are needed. The system’s implementation uses Alexa devices, smart devices, Arduino modules, VoiceFlow, Node-Red, Blynk, Tuya Smart Platform, and IFTTT. The system is appropriately functioning through get, post, and update requests. But these technologies strongly depend on internet connectivity.
The ESP32 microcontroller board and the Blynk platform can provide IoT features to Arduino modules, sensors, or compatible devices. It has been possible to integrate the current sensor and the vibration sensor with the Tuya Smart intelligent devices in the cloud, allowing them to manipulate and access their information.
Lastly, this kind of technology provides remote access, in addition to voice control, to industrial devices to provide more intuitive and friendly work environments. This kind of technology (voice assistants) is widely used in home applications, but recently, it has been used in the health field (hospitals) and industry. Human–machine interaction represents the future through voice commands, so it is necessary to propose industrial devices and research solutions that can respond to vocal commands.
There are works that involve voice assistants, such as [
14,
15], that interact with an industrial robot. In the first case, the authors use Kinetic by Microsoft as the interface between the robot and the human. In the second case, the authors develop a human–robot interface based in neural network structure, but we have not found any work that operates an industrial machine with commercial intelligence, such as an artificial voice assistant like Alexa. We use this kind of technology (Alexa) to provide a voice interface between an industrial electric engine and human (operator). This interface is more easy and intuitive for the machine’s operator with the novelty of providing an access code (password) for the operation of the engine. The password gives more security in the machine operation in an industrial environment.
In this work, we use commercial devices (Alexa, Arduino modules, Alexa’s sensor, and Alexa’s relays) with algorithms that we developed to give the electric engine the intelligence for interacting with an operator. This technology gives the possibility, in the near future, that the engine’s operator could work more safety and easily.
In tests conducted with the voice assistant, problems were encountered in recognizing voice commands when placed in an environment with high noise intensity. Efficiency drops drastically compared to tests under normal (no noise) conditions, specifically from approximately 94% to 75.45%. However, the problem can be solved with the use of noise-canceling microphones connected directly to the assistant, as verified in the tests performed, since the efficiency rose to 97.73%.
With the results obtained from the performance tests carried out, it can be assured that the system guarantees a high level of security in the measurement of the variables, in its operation, and in the execution of the tasks for which it was created. However, it should be noted that this system depends directly on the connection, reliability and speed of the internet network to which the assistant, the control, and measurement devices are connected.
Therefore, for correct operation, an adequate internet connection must be guaranteed, in the frequency of 2.4 GHz (most devices are compatible only with this frequency) and with a bandwidth of more than 50 MB, to avoid problems in the operation of the intelligent devices, data transmission, and the system in general. It is also vital to ensure the security of the internet connection to prevent intruders from accessing the system.
This work shows that it is possible to give a voice command to interact with a machine in an industrial environment—with the use of a password to ensure safe operation, of course. The use of voice commands in industry is vital for workers, because this technology provides the easiest human–machine interaction. In the immediate future, it will be increasingly used.
Future work could focus on voice processing to recognize specific users, thus avoiding possible identity theft in the operation of the proposed system.







 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}