
A Cost-Effective Tracking Algorithm for Hypersonic Glide Vehicle Maneuver Based on Modified Aerodynamic Model


Abstract
:1. Introduction
2. HGV Tracking with Modified Aerodynamic Model
2.1. HGV Aerodynamic Model
2.2. Radar Measurement Model
2.3. Modified Aerodynamic Model Tracking Algorithm
3. HGV Tracking with Multiple Model Algorithms
3.1. IMM Tracking Algorithm
3.1.1. Interaction of the Estimates
3.1.2. Model Updating
3.1.3. Model Probability Calculation
3.1.4. Estimate Combination
3.2. AGIMM Tracking Algorithm
3.2.1. Grid Center Readjustment
3.2.2. Grid Distances Readjustment
- Case 1.
- No-jump: is the biggest in , and .where ; ; is a threshold for detecting an unlikely model; and is a model separation distance (design parameters).
- Case 2.
- Up-jump: is the biggest in , and .where is a threshold for detecting the significant mode.
- Case 3.
- Down-jump: is the biggest in , and
3.3. HGMM Tracking Algorithm
3.3.1. Determination of the Coarse Subset
3.3.2. Determination of the Fine Subset
4. Simulation and Discussion
4.1. Simulation Configuration
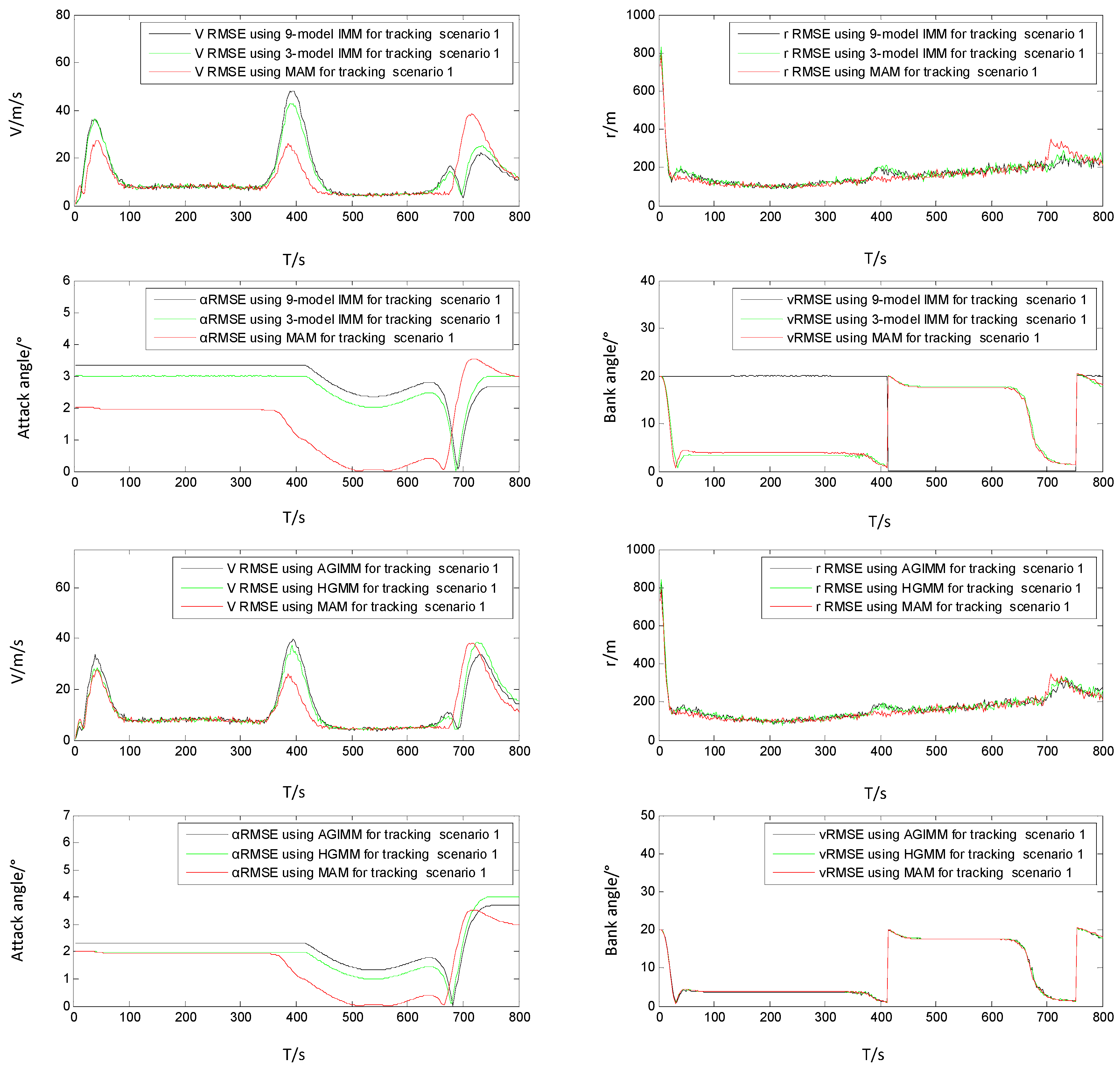
4.2. Simulation Results Comparison and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, G.; Zhang, H.; Tang, G.; Xie, Y. Maneuver modes analysis for hypersonic glide vehicles. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Yantai, China, 8–10 August 2014; pp. 543–548.
- Zhang, X.Y.; Wang, G.H.; Song, Z.Y.; Gu, J.J. Hypersonic sliding target tracking in near space. Def. Technol. 2015, 29, 370–381. [Google Scholar] [CrossRef]
- Lei, M.; Han, C.Z. Expectation-maximization (EM) Algorithm Based on IMM Filtering with Adaptive Noise Covariance. Acta Autom. Sin. 2006, 32, 28–37. [Google Scholar]
- Blom, H.A.P.; Barshalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Wang, H.; Liu, G.; Gu, X. Research on Adaptive Turning Model in Grid Multiple Model Algorithm. J. Proj. Rocket. Missiles Guid. 2008, 28, 241–244. [Google Scholar]
- Qin, L.; Li, J.; Zhou, D. Tracking filter algorithm for near space target based on AGIMM. Syst. Eng. Electron. 2015, 37, 1009–1014. [Google Scholar]
- Jilkov, V.P. Design and comparison of mode-set adaptive IMM algorithms for maneuvering target tracking. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 343–350. [Google Scholar] [CrossRef]
- Zhai, D.; Lei, H.; Li, J.; Liu, T. Trajectory prediction of hypersonic vehicles based on the self-adaptive IMM. Acta Aeronaut. Astronaut. Sin. 2016, 37, 245–253. [Google Scholar]
- Xu, L.; Li, X.R.; Duan, Z. Hybrid grid multiple-model estimation with app.lication to maneuvering target tracking. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 122–136. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Aidala, V.J. Kalman filter behavior in bearings-only tracking app.lications. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 29–39. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 1628–1632.
- Zhu, W.; Wang, W.; Yuan, G. An Improved Interacting Multiple Model Filtering Algorithm Based on the Cubature Kalman Filter for Maneuvering Target Tracking. Sensors 2016, 16, 805. [Google Scholar] [CrossRef] [PubMed]
- Rodger, J.A. Toward reducing failure risk in an integrated vehicle health maintenance system: A fuzzy multi-sensor data fusion Kalman filter app.roach for IVHMS. Expert Syst. Appl. 2012, 39, 9821–9836. [Google Scholar] [CrossRef]
- Ho, Y.-C.; Lee, R. A Bayesian approach to problems in stochastic estimation and control. IEEE Trans. Autom. Control 1964, 9, 333–339. [Google Scholar] [CrossRef]
- Wu, N.; Chen, L. Adaptive Kalman Filtering for Trajectory Estimation of Hypersonic Glide Reentry Vehicles. Acta Aeronaut. Astronaut. Sin. 2013, 34, 1960–1971. [Google Scholar]
- Shen, Z.; Lu, P. Dynamic lateral entry guidance logic. J. Guid. Control Dyn. 2004, 27, 949–959. [Google Scholar] [CrossRef]
- Jorris, T.R. Common Aero Vehicle Autonomous Reentry Trajectory Optimization Satisfying Waypoint and No-Fly Zone Constraints. Ph.D. Dissertation, Air Force Institute of Technology, Dayton, OH, USA, 2007. [Google Scholar]
- Center, N.G.D. US standard atmosphere (1976). Planet. Space Sci. 1992, 40, 553–554. [Google Scholar]
- Li, H. Optimal design of nominal attack of angle for re-entry vehicle. J. Beijing Univ. Aeronaut. Astronaut. 2012, 38, 996–1000. [Google Scholar]
- Wang, J. Mixed guidance method for reentry vehicles based on optimization. J. Beijing Univ. Aeronaut. Astronaut. 2010, 16, 736–740. [Google Scholar]
- Li, H. Reentry guidance law design for RLV based on predictor-corrector method. J. Beijing Univ. Aeronaut. Astronaut. 2009, 35, 1344–1348. [Google Scholar]
- Lu, P.; Hanson, J.M. Entry Guidance for the X-33 Vehicle. J. Spacecr. Rocket. 1998, 35, 342–349. [Google Scholar] [CrossRef]
- Li, H. The Guidance and Control Technology for Nearspace Hypersonic Vehicle; China Astronautic Publishing House: Beijing, China, 2012. [Google Scholar]
- Zhao, J.; Zhou, R. Reentry trajectory optimization for hypersonic vehicle satisfying complex constraints. Chin. J. Aeronaut. 2013, 26, 1544–1553. [Google Scholar] [CrossRef]
- Ding, L.; Geng, F.; Chen, J. Radar Principle [M]; Xi’an Electronic: Xi’an, China, 1995. [Google Scholar]
- Zhang, S.-C.; Hu, G.-D.; Liu, S.-H. Target tracking for maneuvering reentry vehicles with reduced sigma points unscented Kalman filter. In Proceedings of the 1st International Symposium on Systems and Control in Aerospace and Astronautics, Harbin, China, 19–21 January 2006.
- Li, X.R.; Jilkov, V.P. Survey of maneuvering targettracking. Part I: Dynamic models. IEEE Trans. Aerosp. Electron. Syst. Aes 2003, 39, 1333–1364. [Google Scholar]
- Li, X.R.; Bar-Shalom, Y. Multiple-model estimation with variable structure. IEEE Trans. Autom. Control 1996, 41, 478–493. [Google Scholar]
- Li, X.R.; Bar-Shakm, Y. Mode-Set Adaptation in Multiple-Model Estimators for Hybrid Systems. In Proceedings of the American Control Conference, Chicago, IL, USA, 24–26 June 1992; pp. 1794–1799.
- Li, X.R. Multiple-model estimation with variable structure: Some theoretical considerations. In Proceedings of the 33rd IEEE Conference on Decision & Control, Lake Buena Vista, FL, USA, 14–16 December 1994; pp. 1199–1204.
- Mazor, E.; Averbuch, A.; Bar-Shalom, Y.; Dayan, J. Interacting Multiple Model Methods in Target Tracking: A Survey. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 103–123. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P.; Ru, J. Multiple-model estimation with variable structure—Part VI: Expected-mode augmentation. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 853–867. [Google Scholar]
- Baram, Y.; Sandell, N.R. An information theoretic app.roach to dynamical systems modeling and identification. IEEE Trans. Autom. Control 1977, 23, 1113–1118. [Google Scholar]
- Munir, A.; Atherton, D.P. Adaptive interacting multiple model algorithm for tracking a manoeuvring target. IEE Proc. Radar Sonar Navig. 1995, 142, 11–17. [Google Scholar] [CrossRef]
- Xu, L.; Li, X.R. Multiple model estimation by hybrid grid. Proc. Am. Control Conf. 2010, 20, 142–147. [Google Scholar]
- Moose, R.L. An adaptive state estimation solution to the maneuvering target problem. IEEE Trans. Autom. Control 1975, AC–20, 359–362. [Google Scholar] [CrossRef]
- Bogler, P.L. Tracking a Maneuvering Target Using Input Estimation. IEEE Trans. Aerosp. Electron. Syst. 1987, AES–23, 298–310. [Google Scholar] [CrossRef]
- Blair, W.D.; Watson, G.A.; Rice, T.R. Tracking maneuvering targets with an interacting multiple model filter containing exponentially-correlated acceleration models. Asian J. Inf. Manag. 1991, 3, 224–228. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Algorithm | V ARMSE (m/s) | V PRMSE (m/s) | r ARMSE (m) | r PRMSE (m) | ARMSE (°) | ARMSE (°) |
|---|---|---|---|---|---|---|
| MAM | 10.94 | 38.79 | 165.97 | 797.03 | 1.52 | 9.25 |
| Three-model IMM | 12.07 | 43.15 | 169.79 | 847.91 | 2.66 | 9.15 |
| Nine-model IMM | 12.27 | 48.61 | 167.27 | 832.13 | 2.91 | 11.49 |
| AGIMM | 12.09 | 40.09 | 172.12 | 862.06 | 2.17 | 9.25 |
| HGMM | 11.95 | 38.73 | 172.88 | 850.41 | 1.95 | 9.30 |
| Algorithm | V ARMSE (m/s) | V PRMSE (m/s) | r ARMSE (m) | r PRMSE (m) | ARMSE (°) | ARMSE (°) |
|---|---|---|---|---|---|---|
| MAM | 10.95 | 38.04 | 161.99 | 790.48 | 1.63 | 14.57 |
| Three-model IMM | 12.18 | 40.26 | 164.69 | 842.41 | 2.74 | 14.55 |
| Nine-model IMM | 12.27 | 41.50 | 165.02 | 833.08 | 2.98 | 13.13 |
| AGIMM | 12.20 | 38.50 | 167.31 | 824.74 | 2.25 | 14.61 |
| HGMM | 12.10 | 39.20 | 168.57 | 863.36 | 2.03 | 14.63 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Zhu, W.; Bai, G. A Cost-Effective Tracking Algorithm for Hypersonic Glide Vehicle Maneuver Based on Modified Aerodynamic Model. Appl. Sci. 2016, 6, 312. https://doi.org/10.3390/app6100312
Fan Y, Zhu W, Bai G. A Cost-Effective Tracking Algorithm for Hypersonic Glide Vehicle Maneuver Based on Modified Aerodynamic Model. Applied Sciences. 2016; 6(10):312. https://doi.org/10.3390/app6100312
Chicago/Turabian StyleFan, Yu, Wuxuan Zhu, and Guangzhou Bai. 2016. "A Cost-Effective Tracking Algorithm for Hypersonic Glide Vehicle Maneuver Based on Modified Aerodynamic Model" Applied Sciences 6, no. 10: 312. https://doi.org/10.3390/app6100312