1. Introduction
In concrete and cement based structures, the early stage of hydration and the conditions at which curing occurs, influence the quality and the durability of the final products. For instance, as a result of the chemical reactions between water and the cement during hydration, the mixture progressively develops mechanical properties. Final set for the mixture is defined as the time that the fresh concrete transforms from plastic into a rigid state. At final set, measurable mechanical properties start to develop in concrete and continue to grow progressively. The durability and the strength of concrete may deviate from design conditions as a result of accidental factors. Some of these factors are water-to-cement (
w/
c) ratio not controlled well and rainfall that permeates the fresh concrete or dampens the forms prior to casting. As such, the development of nondestructive evaluation (NDE) methods able to determine anomalous concrete conditions is very much needed, and has been a long-standing challenge in the area of material characterization. To date, many NDE methods for concrete exist, and some of them resulted in commercial products. The interested reader is referred to the excellent monograph [
1] to gain a holistic knowledge of such methods. The most common technique is probably the one based on the propagation of bulk ultrasonic waves through concrete. This approach measures the speed of the waves propagating through the thickness of the test object to determine the elastic modulus using an empirical formula [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10]. This approach is usually referred to as the ultrasonic pulse velocity (UPV) method. If the access to the back wall of the sample is impractical, the ultrasonic testing is conducted in the pulse-echo mode. A popular commercial system is the Schmidt hammer [
11,
12,
13,
14], which consists of a spring-driven steel hammer that hits the specimen with a defined energy. Part of the impact energy is transmitted to the specimen and absorbed by the plastic deformation of the specimen and the remaining impact energy is rebounded. The rebound distance depends on the hardness of the specimen and the condition of the surface. The harder the surface, the shorter the penetration time (or depth) and therefore the higher is the rebound.
Despite decades of research and developments, much research is still ongoing [
13,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28] and many interesting works covering a wide spectrum of NDE techniques are being investigated. In this paper, we propose an NDE method based on the propagation of highly nonlinear solitary waves (HNSWs) along a 1D chain of spherical particles placed in contact with the concrete to be tested. These waves are compact mechanical waves that can form and travel in highly nonlinear systems, such as a chain of elastically interacting spheres. The interaction between two adjacent beads is governed by the Hertz’s law [
29,
30]
F = Aδ
3/2, where
F is the compression force between the granules and δ is the closest approach of their centers. The coefficient
A is equal to
E·d1/2/[3·(1 −
ν2)] where
E,
d, and
ν are the modulus of elasticity, diameter, and Poisson’s ratio of the spheres, respectively.
The most common way to induce a solitary pulse, hereinafter indicated as the incident solitary wave (ISW), is by tapping the first particle of the chain with a particle striker having at least the same mass of the individual beads forming the chain. Some researchers have demonstrated that a piezo-actuator [
31,
32] or even laser pulses [
33] can be used as well. When the ISW reaches the interface with the material to be tested, the pulse is partially reflected giving rise to the primary reflected solitary wave (PSW). Both ISW and PSW can be sensed either by a force sensor located at the opposite end of the chain or by embedding a sensor bead along the chain. For a detailed description of the underlying basis of HNSWs, see ref. [
34,
35,
36,
37].
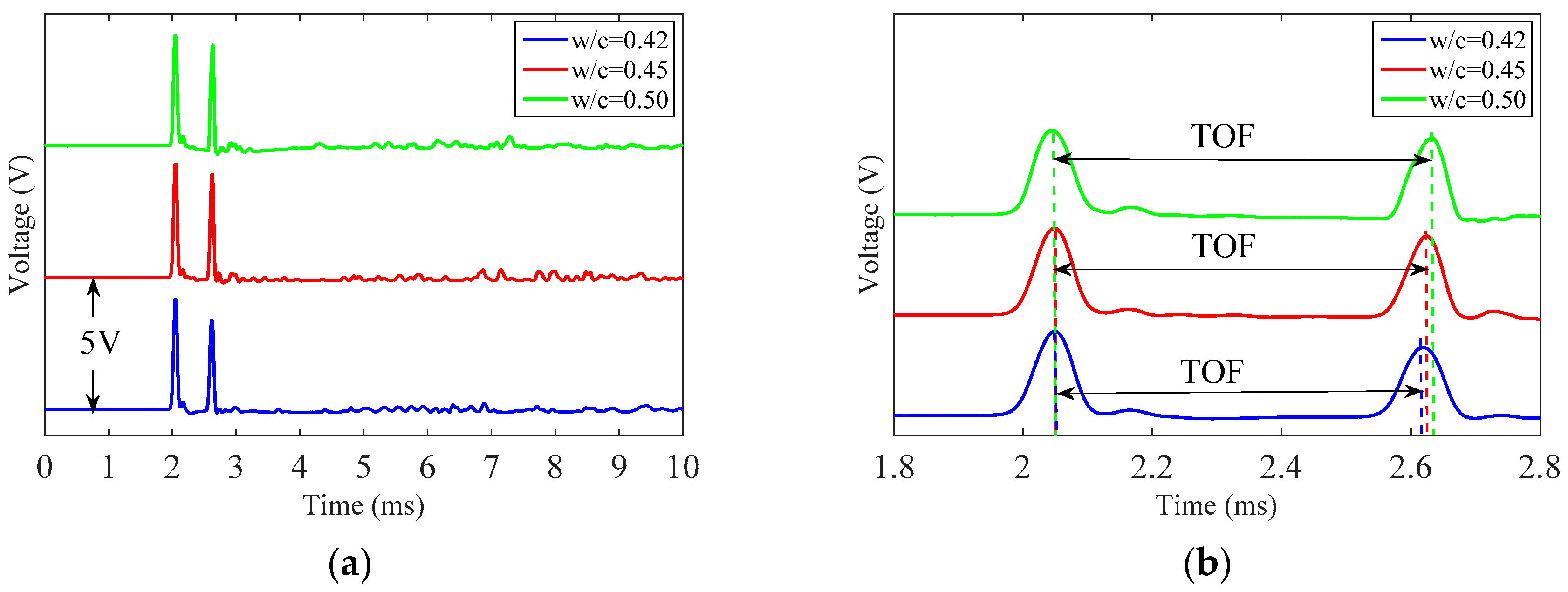
The study presented here expands on a recent work where HNSWs were used to determine the elastic modulus of concrete cylinders fabricated with three different
w/
c ratios, namely 0.42, 0.45, and 0.50 [
38]. In the present work, we use some of the findings from [
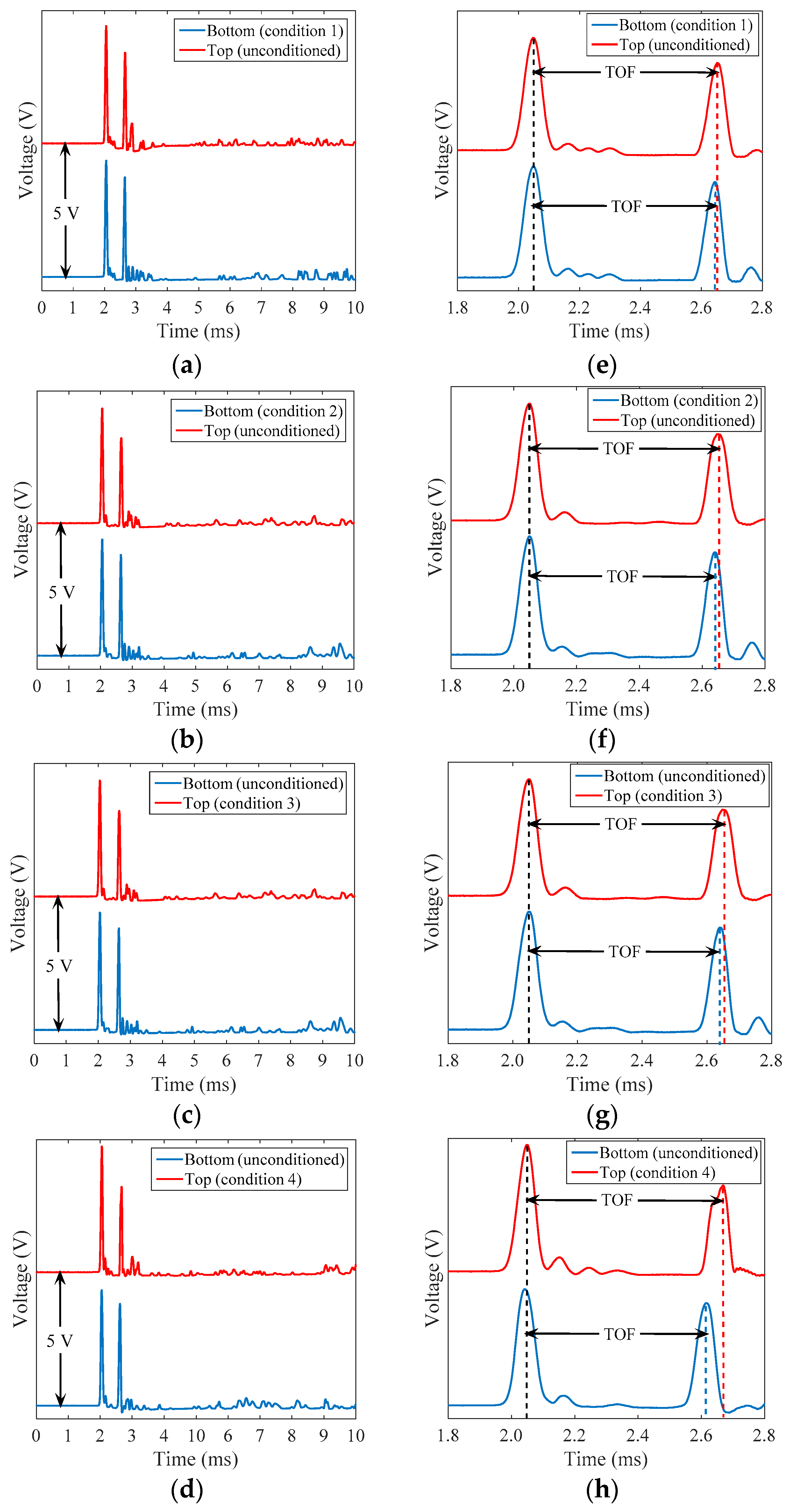
38] to predict water in excess in short concrete beams made with
w/
c = 0.42 but corrupted with water. Two conditions were simulated. The first one consisted of standing water in formworks prior to pouring concrete, whereas the second condition consisted of sprinkling water above the fresh concrete during casting and surface finishing. These two conditions may reflect adverse weather in the field. The objective of the study was the development of a system that, unlike the UPV method, can predict localized deterioration conditions associated with poor quality
w/
c ratios.
Three HNSW transducers, referred with the descriptor P1, P2, and P3, were used to quantify the elastic modulus of the beams. Owing to the novelty of the transducers design it was decided to assemble and test three of them in order to demonstrate and quantify the repeatability of the design and to quantify any variation of the results associated with differences in the assembly. The findings were then compared to the results of a conventional UPV test in order to evaluate and prove advantages and eventually limitations of the proposed approach.
With respect to ultrasonic-based NDE, the HNSW-based approach: (1) exploits the propagation of HNSWs confined within the particles of the chain; (2) employs a cost-effective transducer; (3) does not require any knowledge of the sample thickness; (4) does not need access to the back-wall of the sample; (5) provides point-like information rather than information about the average characteristics of the whole sample. The method also differs significantly from the Schmidt hammer. In fact, the hammer can be used to test hardened material but the HNSW approach can also characterize fresh concrete and cement as demonstrated in [
39,
40]; only one parameter, the rebound value, is used in the Schmidt hammer test, while multiple HNSW features can, in principle, be exploited to assess the condition of the underlying material. The hammer may induce plastic deformation or microcracks into the specimen, while the HNSW approach is purely nondestructive.
The paper is organized as follows. The next section describes the concrete samples, the design of the HNSW transducers, and the test protocols adopted throughout the study.
Section 3 presents the experimental results associated with the concrete cylinders and it is largely excerpted from reference [
38] in order to provide a comprehensive knowledge in support of the findings of
Section 4 that presents the results associated with the short beam. The latter represents the core novelty of the present paper. Finally,
Section 5 summarizes the findings of the project and provides some suggestions for future studies.
2. Experimental Setup
2.1. Materials
To set the baseline data, eighteen concrete cylinders were cast and tested: nine were evaluated nondestructively, whereas the remaining nine were tested according to the ASTM C469. The cylinders were 152.4 mm (6 in.) in diameter and 304.8 mm (12 in.) high. Three w/c ratios, namely 0.42, 0.45, and 0.50, were considered.
The materials are listed in
Table 1a and the mixture designs are presented in
Table 1b. To ease identification, we labeled the samples according to
Table 1c.
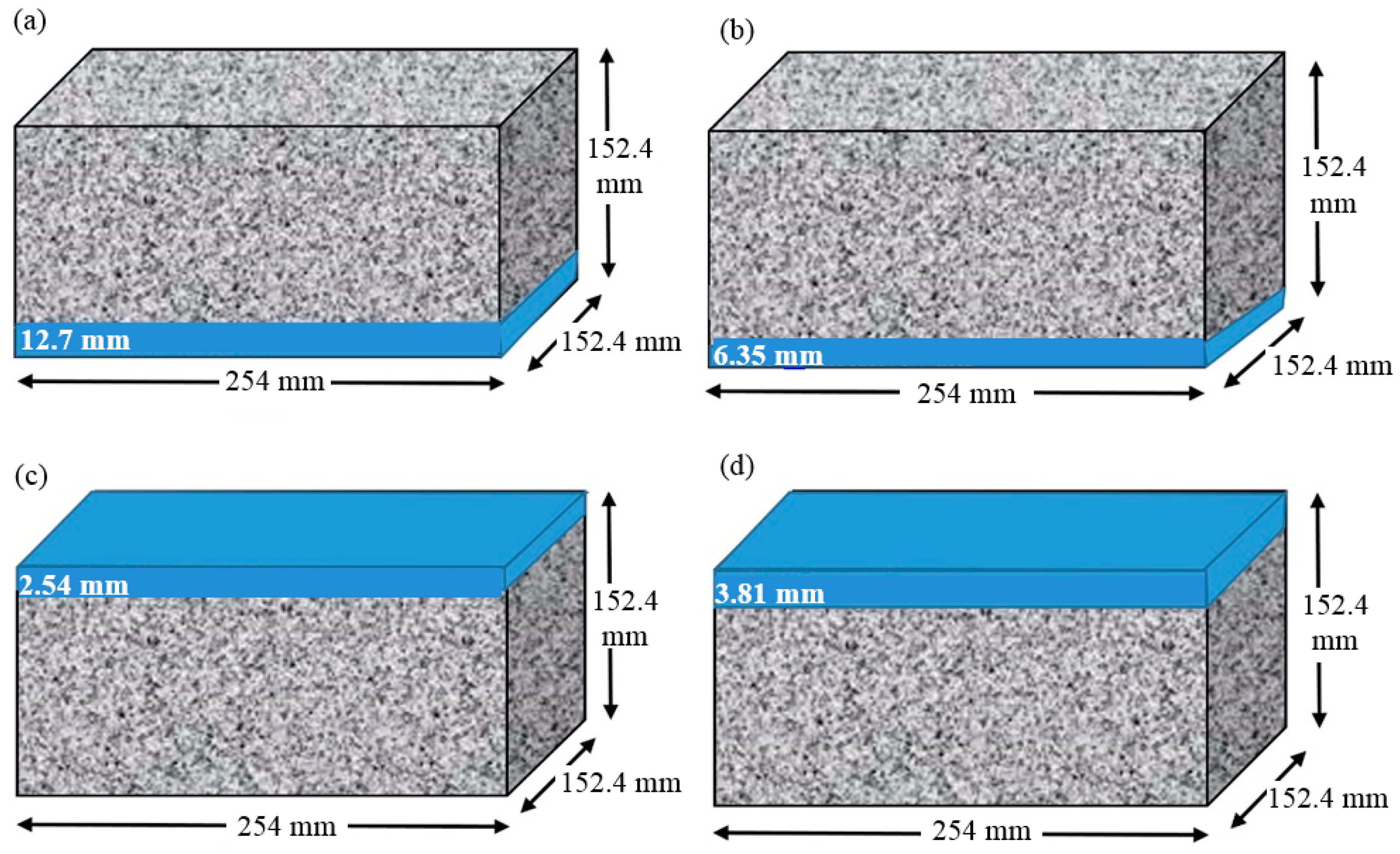
Then, sixteen 15.2 cm × 15.2 cm × 30.4 cm (6 in. × 6 in. × 12 in.) beams were fabricated using concrete mix design with
w/
c = 0.42. The beams were subject to the four different scenarios sketched in
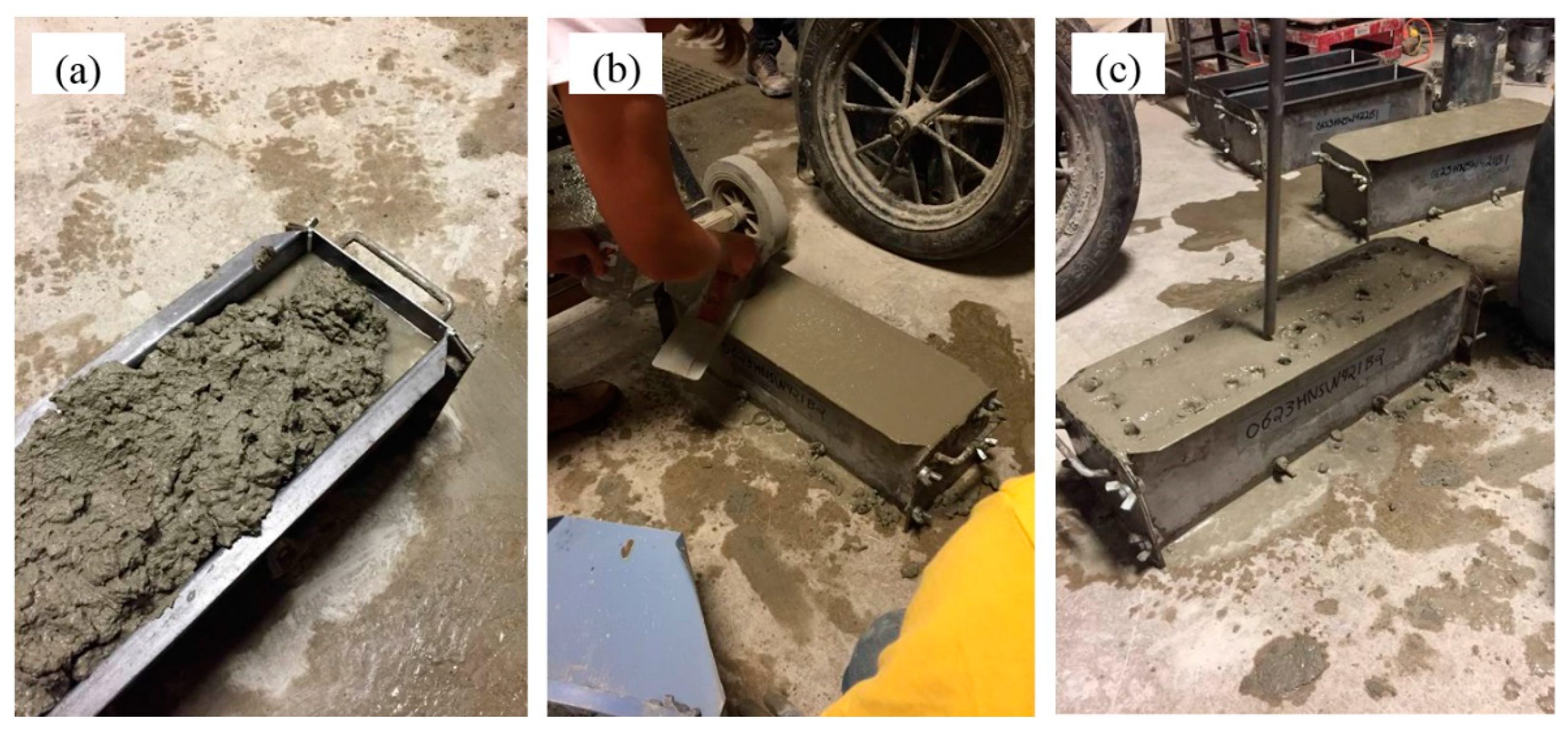
Figure 1. Each scenario represented either two surface finishing or two standing water situations in the formworks. Conditions 1 and 2 reflected the field case where water accumulates on the formwork as a result of rainfall prior to the placement of the concrete. To create Conditions 1 and 2, a predetermined volume of water based on the surface area of the beam mold was measured and poured on the sealed molds. Concrete was placed as evenly as possible into the molds and a shaft vibrator was then used to consolidate the concrete mixture before finishing the top surface. During the fabrication, the standing water was seen migrating to the top as shown in
Figure 2a. After consolidation, the top surfaces of the beam molds were finished.
Conditions 3 and 4 simulated instead the occurrence of rainfall during placement and finishing of the concrete. To create these conditions, a specific procedure was developed in an effort to best simulate the finishing of rainfall that would occur on a job site. The procedure began by placing the concrete into the dry beam mold without any consolidation or finishing performed. The predetermined volume of surface water, similarly based on the base area of the mold, was then divided into thirds. The first application of water (one-third of the total surface water) was completed immediately after the concrete was placed into the beam mold. After this first application, a shaft vibrator was used to consolidate the concrete in the mold. The top surface of the beam mold was then struck off and rodded with the rod only penetrating into the concrete approximately 25 mm (1 in.). The second application of surface water was then completed. Following this second application of surface water, the top surface was again finished (
Figure 2b) and rodded (
Figure 2c). The third and final application of surface water was then applied before the top surface was finished for the last time. This surface finishing process was found to be the best way in controlling the application of surface water and simulating what actually happens on a bridge project. This modified amount of surface water was applied in three separate stages (one-third volume per application), as described above.
Two beams per condition per day were cast. We note here that the amount of water added in the four conditions raised the true w/c ratio to 0.627, 0.524, 0.462, and 0.483, respectively for Conditions 1 to 4. The calculations assumed that the water standing on the formworks or sprinkled above the fresh concrete was uniformly distributed across the entire volume of the specimens.
2.2. HNSW Transducers
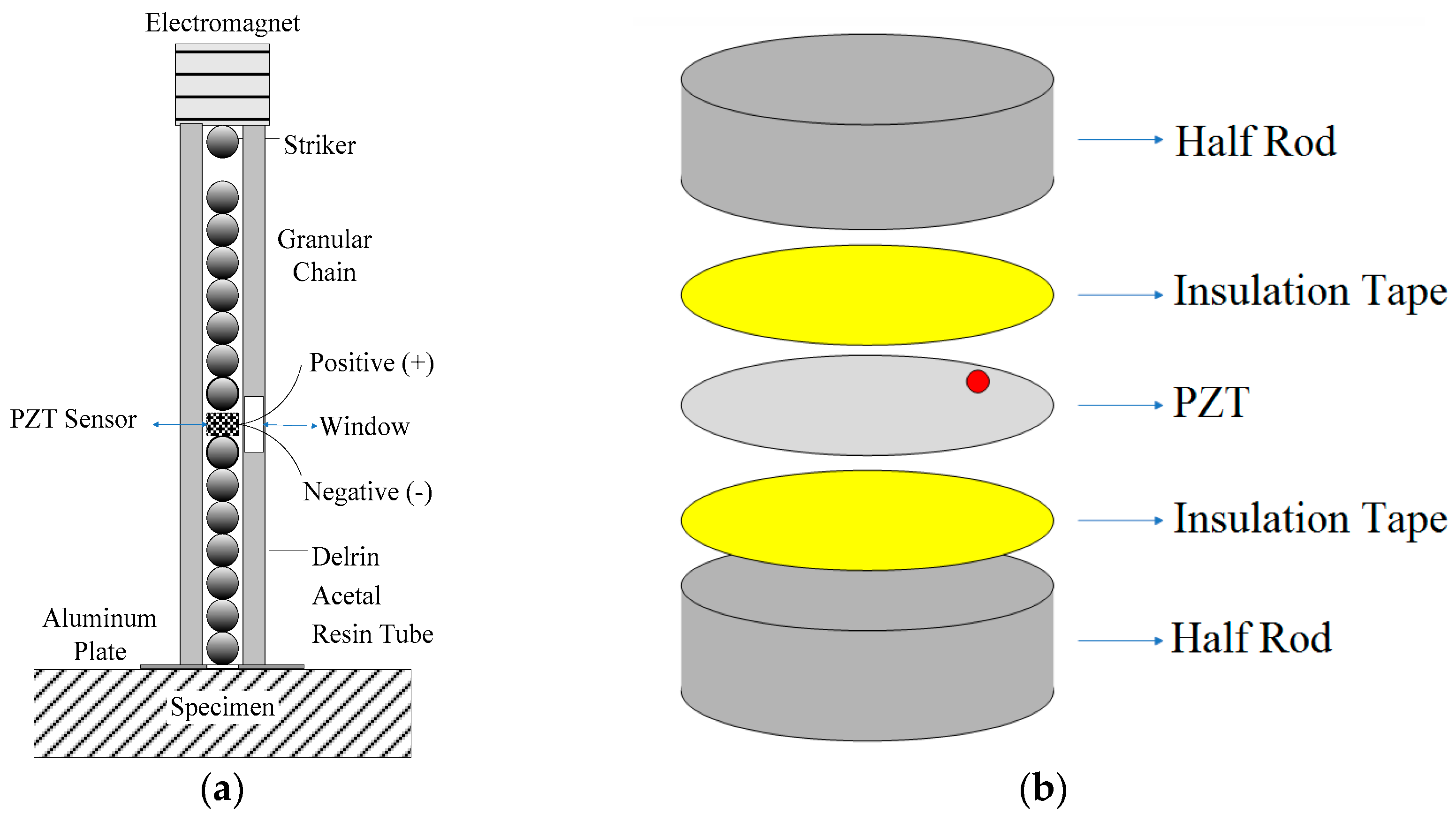
Three transducers were assembled. Each transducer contained sixteen AISI 302 steel particles (McMaster-Carr, Aurora, IL, USA) as schematized in
Figure 3. The second particle from the top was nonferromagnetic, whereas the others were ferromagnetic. The properties of the particles were: diameter
d = 19.05 mm, density ρ = 7800 kg/m
3, mass
m = 27.8 g, modulus of elasticity
E = 193 GPa, and Poisson’s ratio
ν = 0.29. Each chain was held by a Delrin tube (McMaster-Carr, Aurora, IL, USA) with outer diameter
D0 = 22.30 mm and inner diameter slightly larger than
d in order to minimize the friction between the striker and the inner wall of the tube and to minimize acoustic leakage from the chain to the tube. The striker was driven by an electromagnet (made in the lab) built in our lab and powered by a (DC) power supply (B & K Precision, Melrose, MN, USA).
The sensing system consisted of a built-in sensor-rod schematized in
Figure 3b and located in lieu of the 9th particle. The sensor-rod was made of a piezo ceramic (Steminc Piezo, Miami, AZ, USA) embedded between two half rods (McMaster-Carr, Aurora, IL, USA). The disc (Steminc Piezo, Miami, AZ, USA) was 19 mm diameter and 0.3 mm thick and insulated with Kapton tape (McMaster-Carr, Aurora, IL, USA). The rod was made from the same material as the beads, and has a mass
mr = 27.8 g, a height
hr = 13.3 mm, and a diameter
Dr = 19.05 mm. The sensor-rod had approximately the same mass of the individual particles in order to minimize any impurity in the chain that may generate spurious HNSWs. Finally, the falling height of the striker was 5 mm.
At the bottom of the transducers a 0.254 mm (0.1 in.) thick aluminum sheet (McMaster-Carr, Aurora, IL, USA) was glued to the plastic tube in order to prevent the free fall of the particles. A through-thickness hole was devised to allow for direct contact between the last particle of the chain and the concrete material. The transducers were driven simultaneously by a National Instruments-PXI unit running in LabVIEW (9.0, National Instruments, Austin, TX, USA, 2009), and a DC power supply and a Matrix Terminal Block (NI TB-2643) (National Instruments, Austin, TX, USA) to branch the PXI output into three switch circuits to trigger the action of the electromagnets. The lead-zirconate-titanite (PZT) sensors (Steminc Piezo, Miami, AZ, USA) were connected to the same PXI, and the signals were digitized at 400 kHz sampling frequency, i.e., 2.5 µs sampling period.
2.3. Test Protocol
All the HNSW-transducers were used to test all the specimens, i.e., the experiments were conducted in a round-robin fashion, in order to prevent any bias in the results that may have stemmed from differences during the assembly. The cylinders were tested using the HNSWs immediately after curing the samples at 21 °C (70 °F) 95% relative humidity for 28 days, and completed in a day. The experiments were conducted in a single day. For each test, 50 measurements were taken.
The beams were tested at room conditions after 28 days of curing at 21 °C (70 °F) and at relative humidity of 95%. The UPV method was employed the day after testing with the solitary waves. Both top and bottom surfaces of the beams were tested by removing them from the mold and eventually rotated. All the transducers were placed on the surface of the beam simultaneously, and fifty measurements were recorded by each transducer.
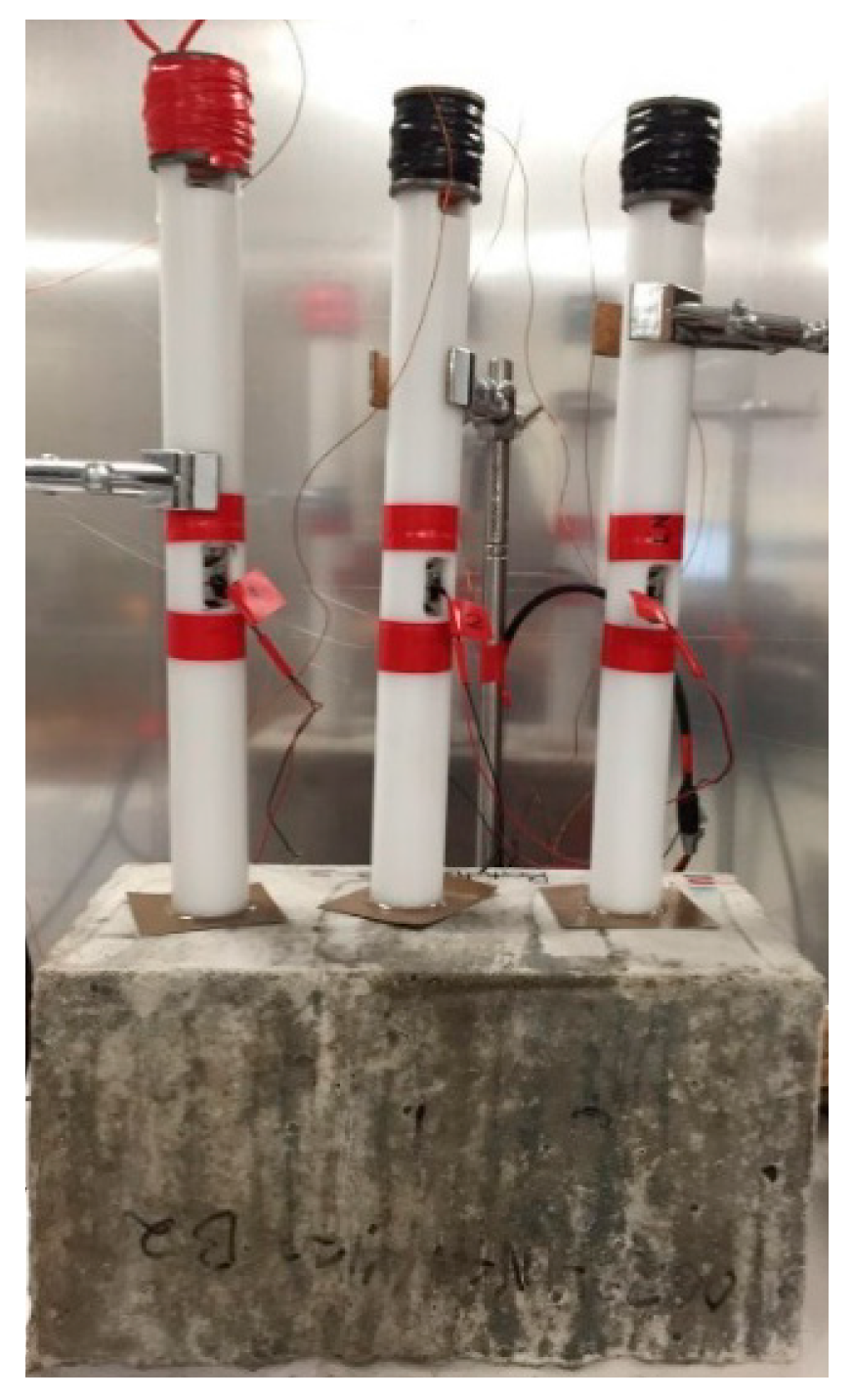
Figure 4 shows the setups relative to the solitary wave measurements. It can be seen that each sample was tested simultaneously with three transducers and at three different locations. This translates in time and cost-savings. Posts (Techspec, Midland, TX, USA) and clamps (Techspec, Midland, TX, USA) were used to hold the transducers.
2.4. Model to Extract the Elastic Modulus
In order to extract the elastic modulus of the concrete in contact with the chain, we modelled numerically the dynamic interaction between a chain of particles identical to the one embedded in the transducer and an elastic material that mimics the concrete. The partial differential equation of the motion associated with the propagation of an HNSW in the chain can be determined using Lagrangian description of particle dynamics:
In Equation (1),
ui is the
ith particle displacement, [
x]
+ denotes
max(
x, 0), and
A the stiffness constant present in the Hertz’s law. By solving this equation, the time history of the
nth particle’s oscillation is obtained and then the displacements of the particles can be used to compute the approach
δ = ui+1 −
ui and then to apply in the Hertzian relationship. More details about the models are available at [
38,
41,
42].
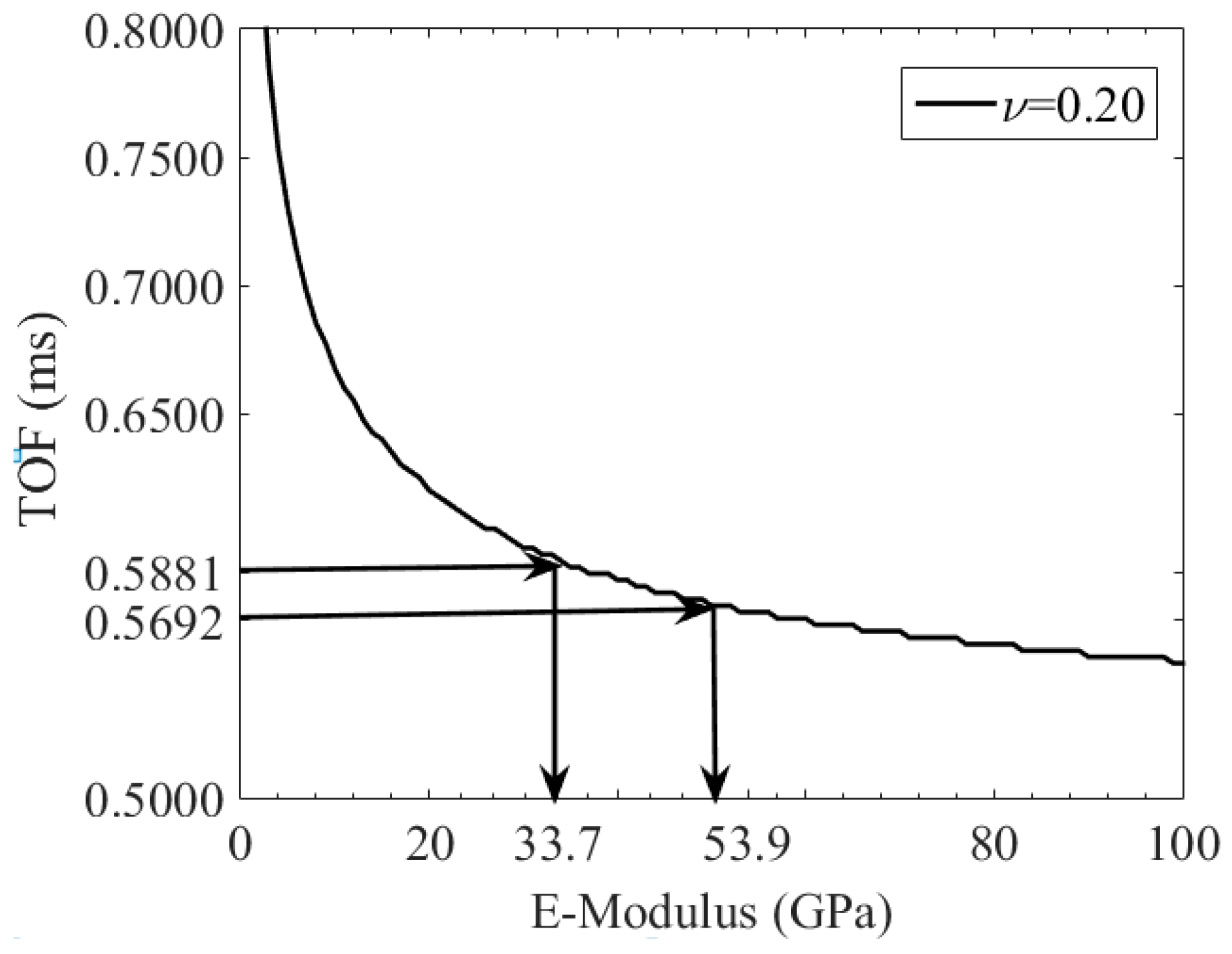
Figure 5 shows the time-of-flight (TOF) of HNSWs as a function of the Young’s modulus for a Poisson’s ratio equal to 0.20, which is a typical value for concrete. The graph shows that the Young’s modulus affects significantly the wave feature when
E < 100 GPa; moreover, when the modulus of elasticity of the test sample is higher than 25 GPa, small differences in the measurement of the TOF, let say 3%, yields about 60% change in the estimated modulus. More details about the procedure to generate
Figure 5 are available at [
43].
In this study, we used
Figure 5 to estimate the modulus of the samples by intersecting the experimental TOF to the numerical curve. For illustrative purposes, the figure shows the modulus corresponding to two experimental data, namely 0.5881 ms and 0.5692 ms.
The dynamic modulus of elasticity
Ed was then converted into the static modulus of elasticity
Es using the empirical formula proposed by Lydon and Balendran [
44,
45]:
2.5. Ultrasonic Pulse Velocity (UPV) Method
The conventional UPV method was employed for comparative purposes to determine the dynamic modulus of elasticity
Ed of the concrete specimens using the well-known relationship:
where
V is the velocity of the bulk wave and
K is:
In Equation (4), μ is the dynamic Poisson’s ratio of the sample material. When this ratio is not available, the conventional static Poisson’s ratio
ν can be used [
1]. After computing the dynamic modulus, Equation (2) is used to estimate the static modulus.
The UPV test was performed by measuring the velocity of the wave propagating along the axial direction of the cylinders, and the through-thickness (top-bottom) direction of the beams. Two commercial transducers (Olympus X1020, 100 kHz, Center Valley, PA, USA), two pre-amplifiers, a function generator (Tektronix AFG 3022, Fort Worth, TX, USA), and an oscilloscope (LeCroy 44 Xi, Chestnut Ridge, NJ, USA) were utilized. The average of 300 measurements was recorded for each cylinder and for each beam.
5. Discussion and Conclusions
In this article, we showed the principles of a novel NDE method for concrete based on the propagation of highly nonlinear solitary waves along a metamaterial in contact with the concrete to be evaluated. The method aimed at determining the modulus of hardened concrete, in particular to estimate the water-to-cement ratio in a concrete volume close to an HNSW transducer. We demonstrated that the transducers designed and assembled to exploit the principles offer sufficient repeatability and reliability to identify the differences in the amount of water purposely added to the beams in order to mimic rainfall situations.
Owing to the nature of concrete material, it is acknowledged that the w/c ratio is likely not to be the only concrete parameter affecting the amplitude and the time of flight of the reflected solitary wave. Future studies should look at the effect of the aggregate size and overall any other factor that is known to influence the Young’s modulus of concrete. Nonetheless, the study presented in this paper is the first attempt to prove that solitary waves can be used to measure water in excess in concrete surfaces.
The advantages of the proposed HNSW-based method are the easy and fast implementation, the possibility to carry out a large number of tests simultaneously, and independence upon internal damage and/or the presence of reinforcing steels inside the concrete. Finally, being a local and contact method, the approach can be successfully applied to characterizing effects of finishing and curing conditions.
Figure 5 showed that the measured values of
E are on a part of the curve that is not extremely favorable for sensitivity. Future studies should redesign the metamaterial, such as different sized or different modulus balls, in order to shift the region of influence in a range where a large change in the TOF gives rise to small variation of the Young modulus. Such a region would consent to discriminate small differences in the Young modulus due to changes in the
w/
c ratio.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}