
RCLED Optimization and Nonlinearity Compensation in a Polymer Optical Fiber DMT System


Abstract
:1. Introduction
- (1)
- The nonlinear transition noise caused by the electro-optical (E/O) converter;
- (2)
- The clipping noise caused by the minimum turn-ON voltage and the maximum saturation voltage (SAV) or maximum permissible voltage.
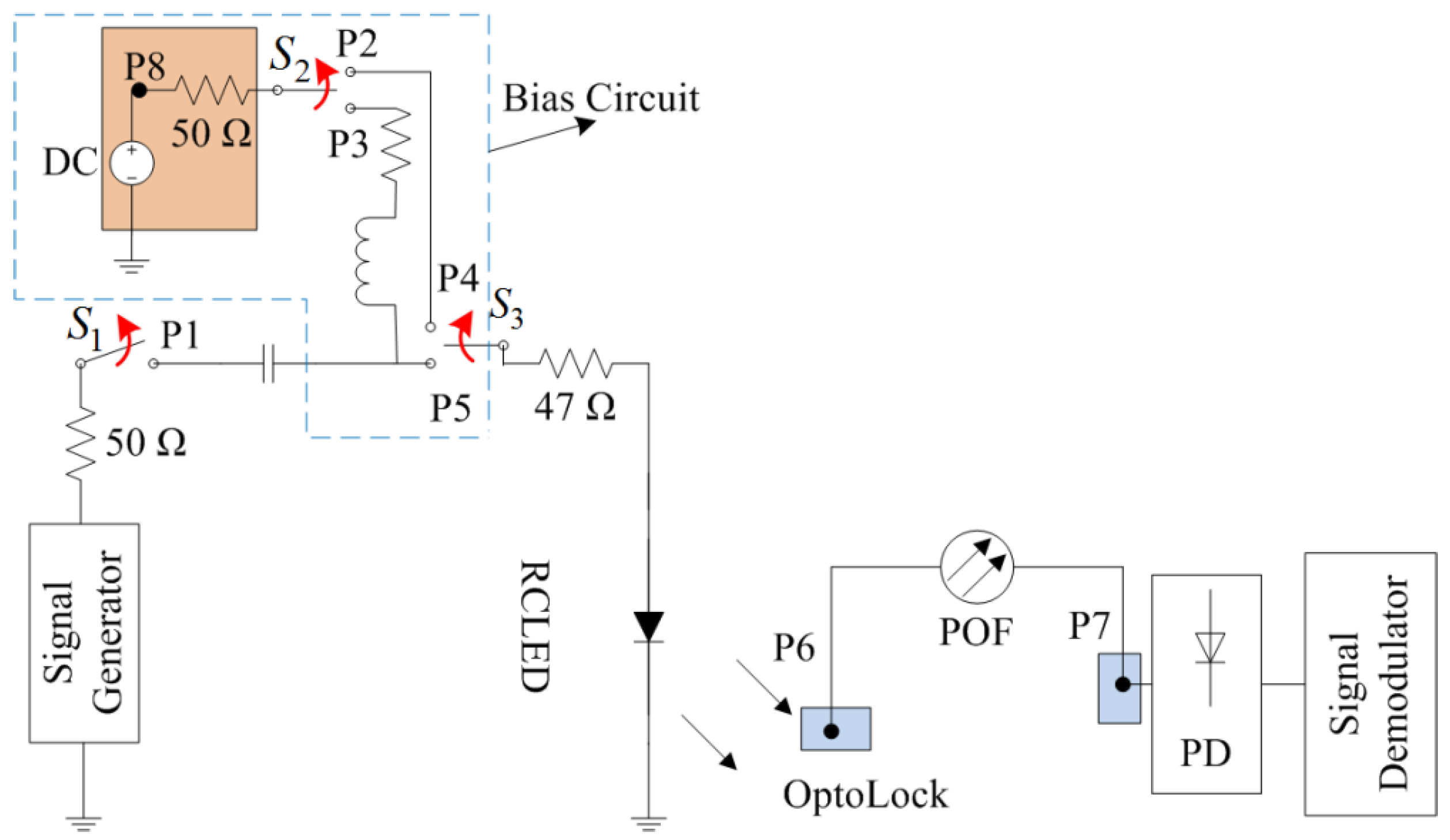
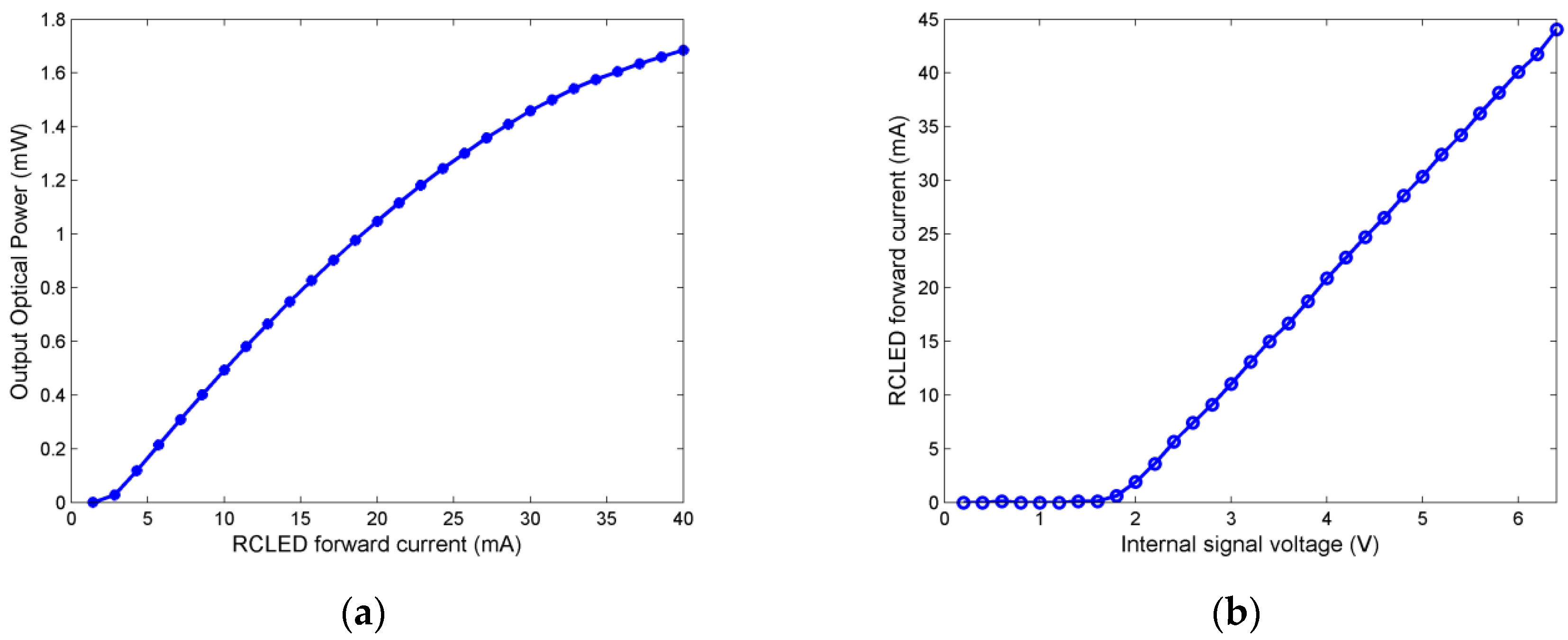
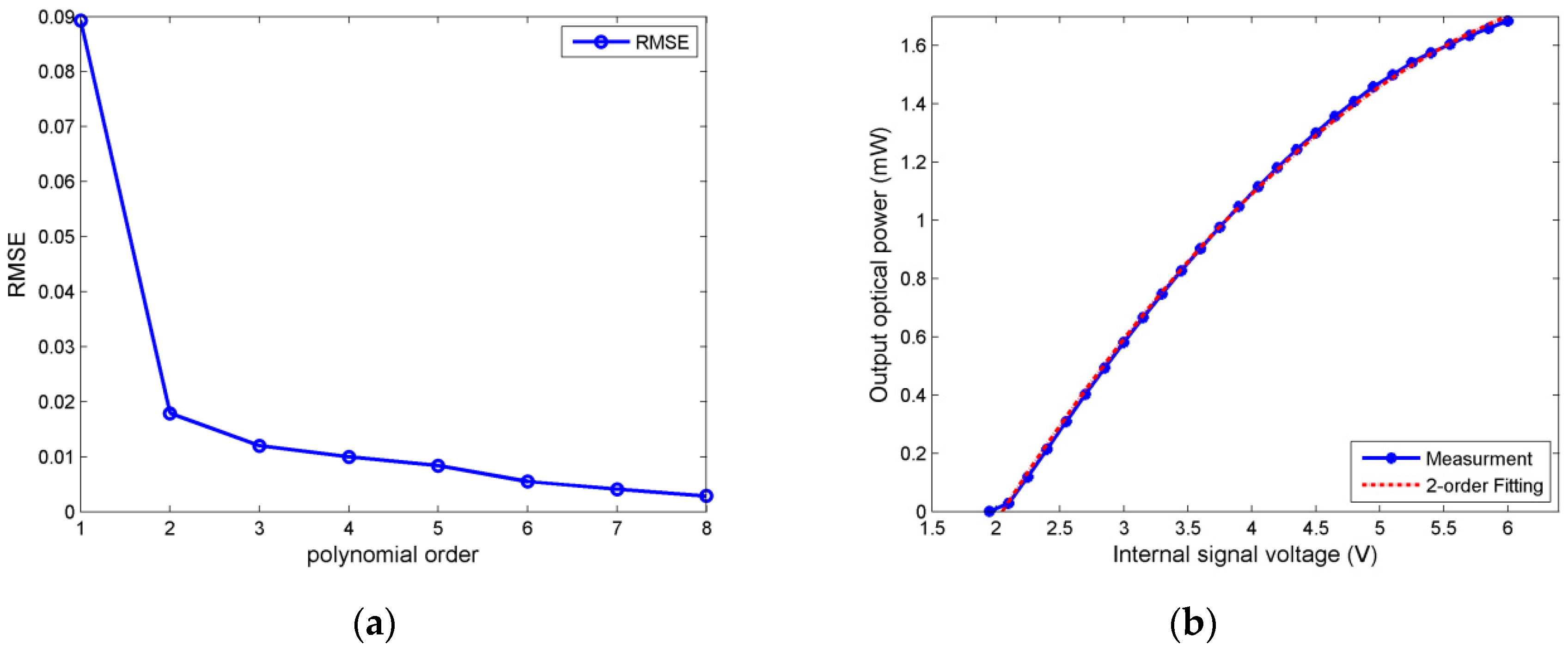
2. RCLED Measurement and Modeling
3. Nonlinear Noise
4. Nonlinearity Mitigation
4.1. Operating Point Optimization
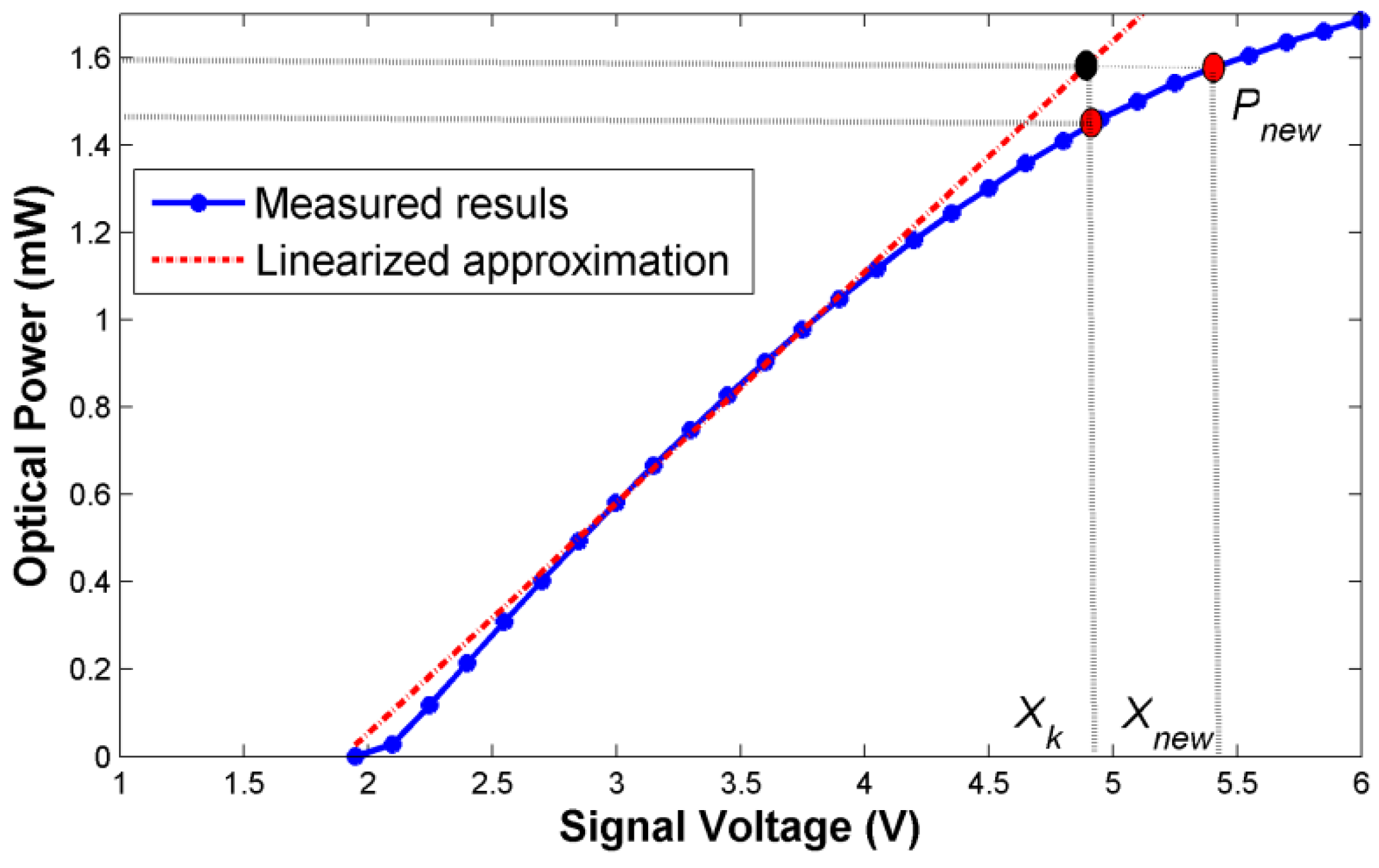
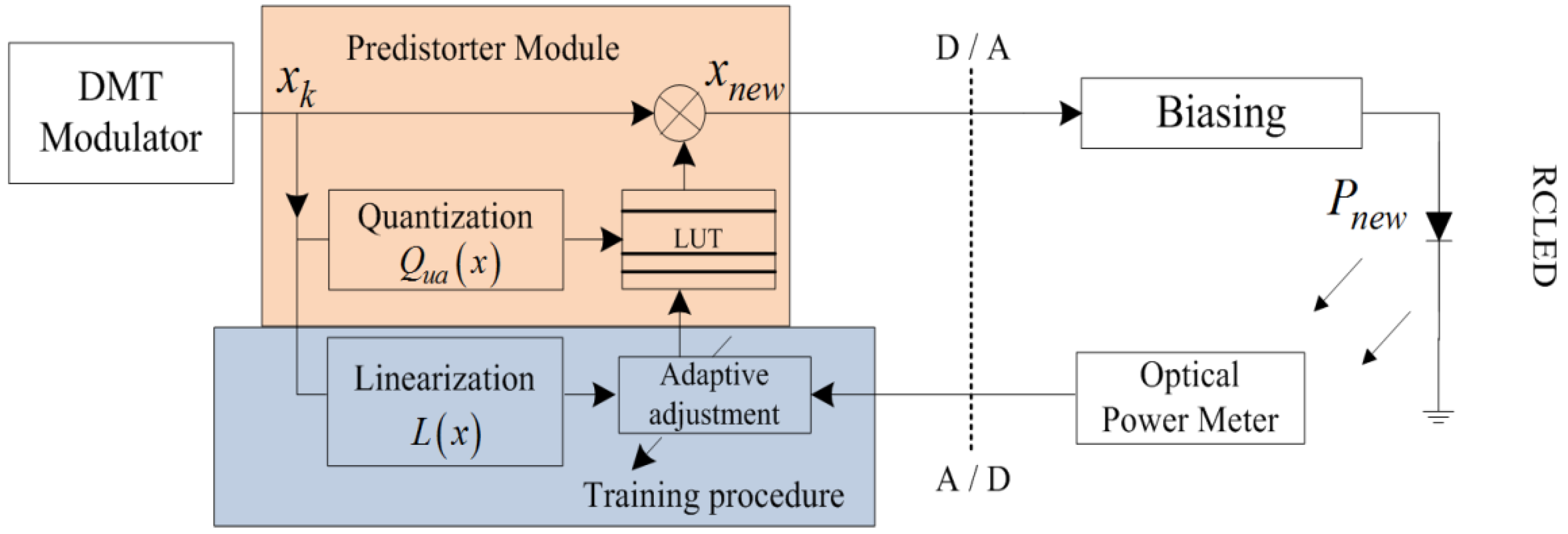
4.2. Nonlinear Compensation
| Algorithm 1: An adaptive iterative algorithm to obtain the gain values . |
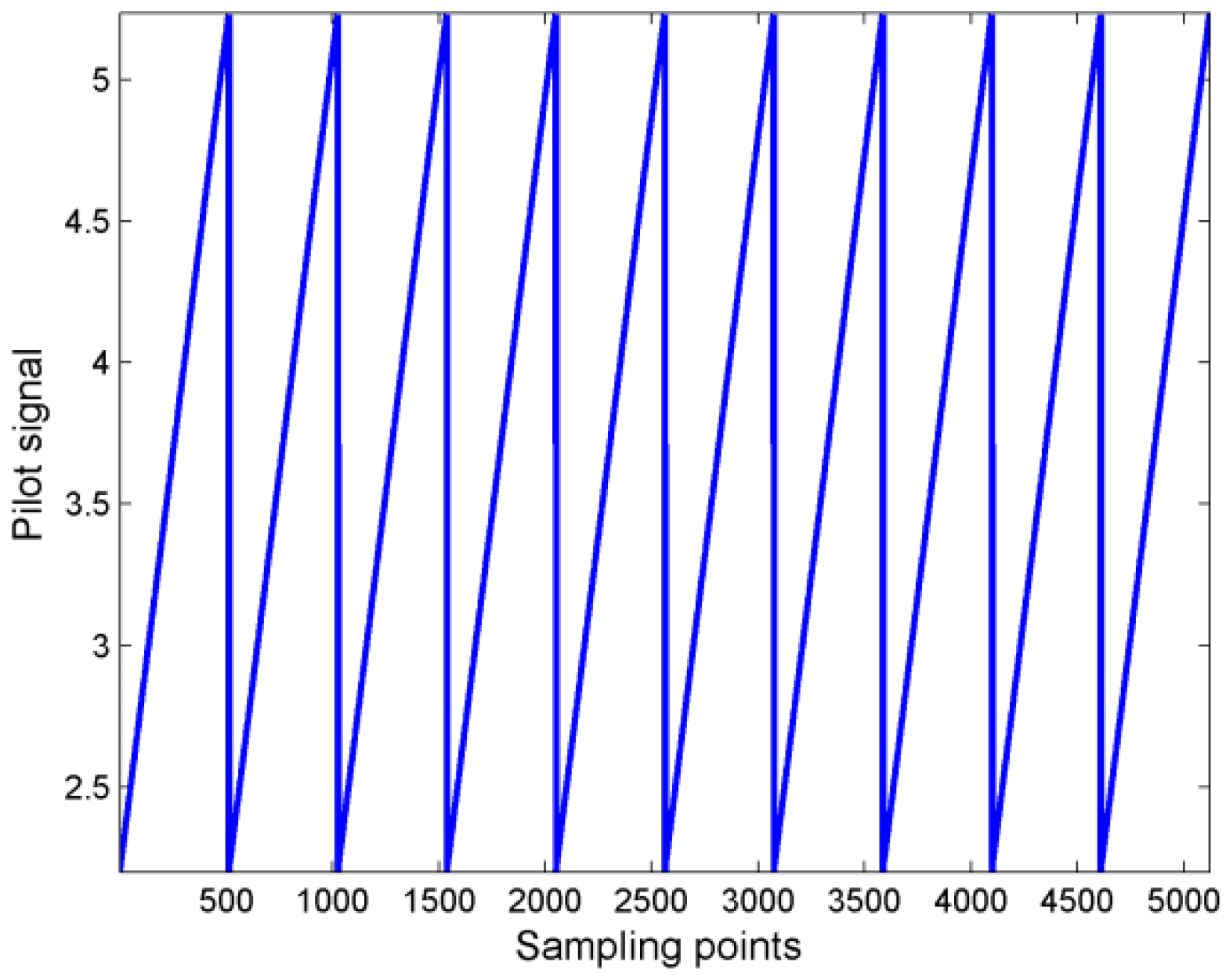
| Input: Initial gain vector and , quantized pilot signal , slot number , step factor , stop criteria , the maximum pilot number , and the adaptive adjustment factor and . |
| Initialization: , , . |
| Step1. Divide into equally slots, the sub-portion pilot can be expressed as (). |
| Step2. for to do |
| ; |
| for to do |
| ; |
| ; |
| ; |
| ; |
| ; |
| end for |
| ; |
| ; |
| end for |
| Step3. . |
| Step4. if , then |
| ; |
| if , then |
| ; |
| ; |
| go to Step1. |
| end if |
| go to Step2. |
| end if |
| Step5. if and then |
| break. |
| else , go to Step2. |
| end if |
| Output: The gain value vector , the overheads of pilot signal , the RMSE . |
5. Results and Discussions
5.1. Nonlinear Effect
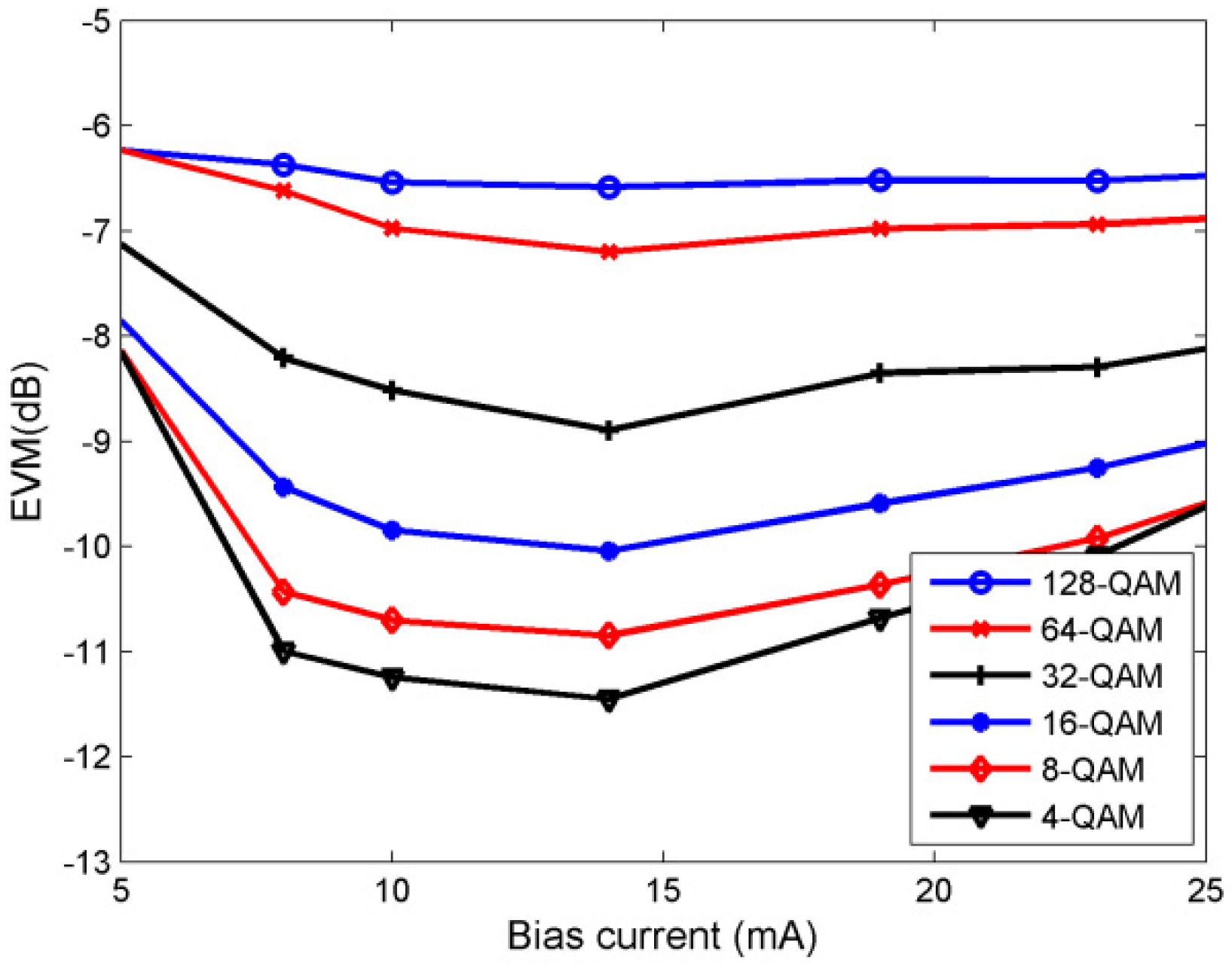
5.2. Effect of DC Bias
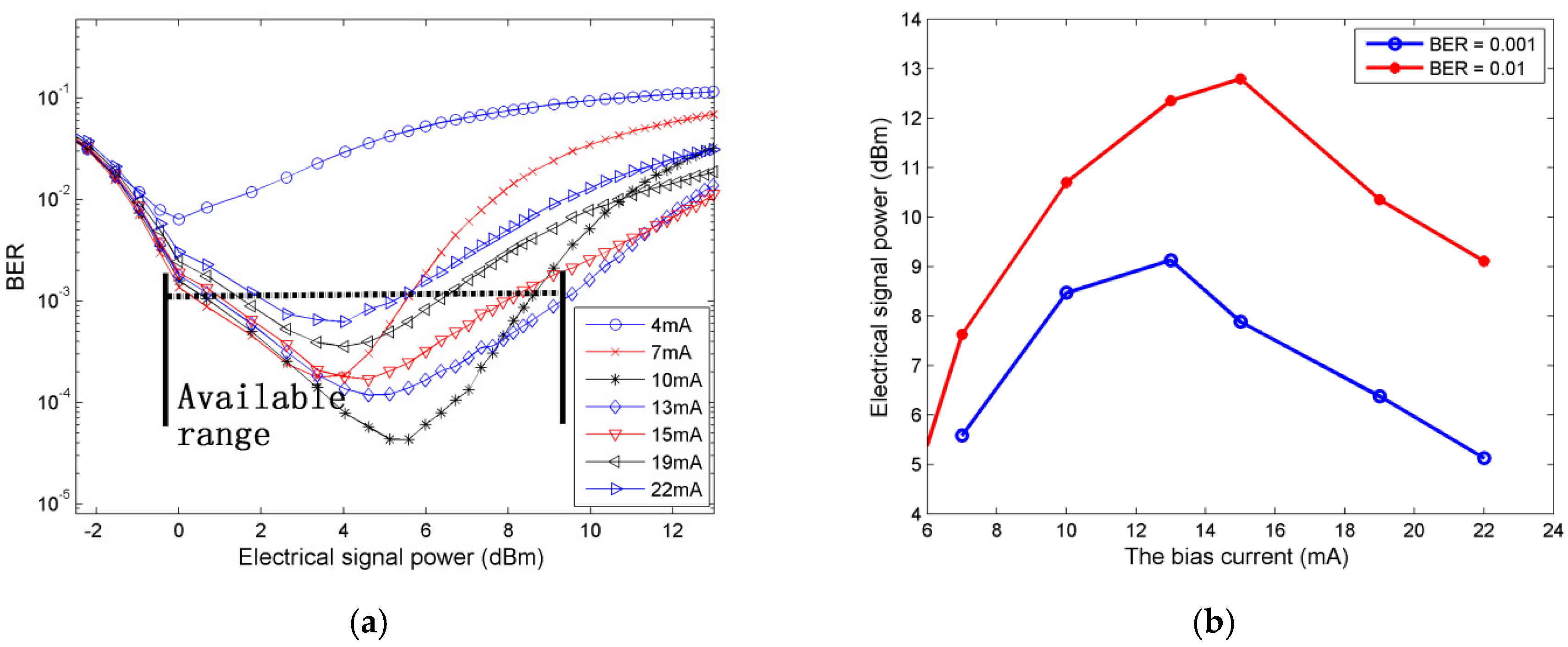
5.3. The Effect of Input Power Range
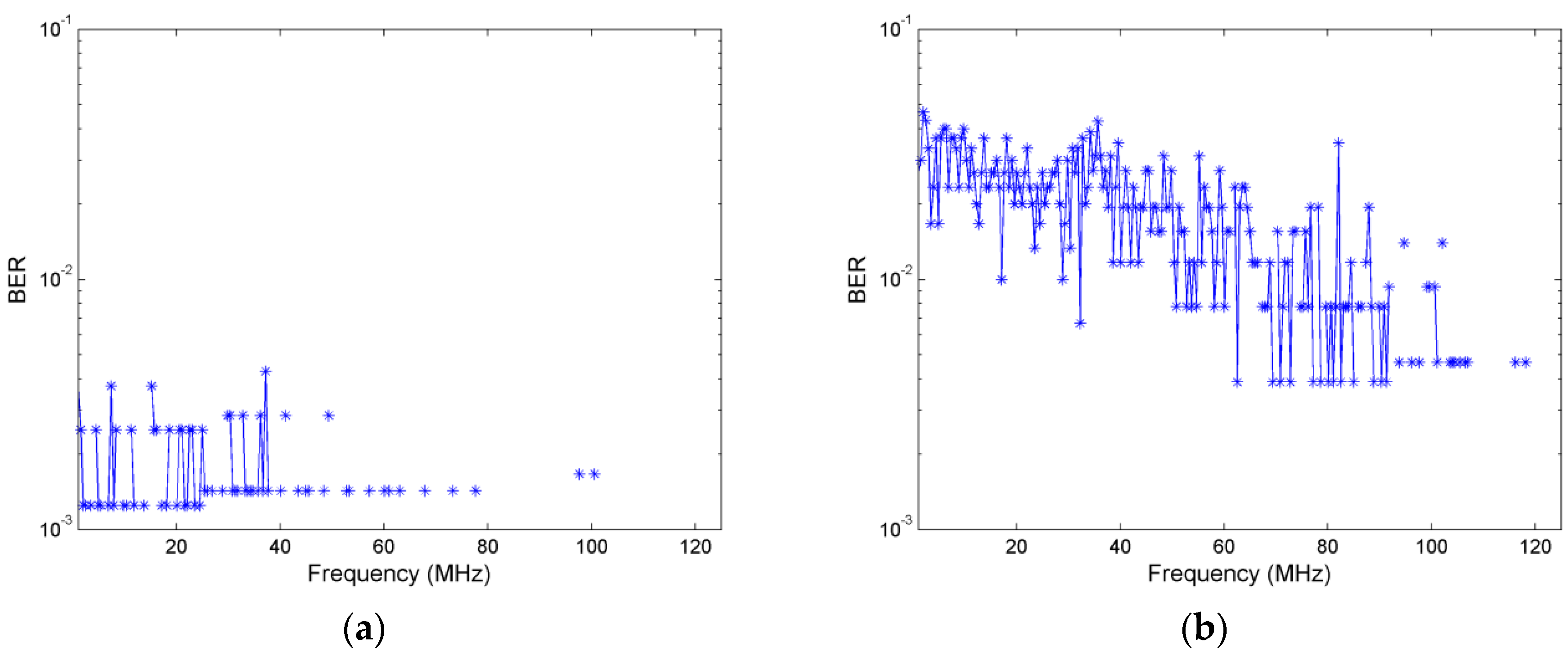
5.4. Nonlinearity Compensation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nespola, A.; Abrate, S.; Gaudino, R.; Zerna, C.; Offenbeck, B.; Weber, N. High-speed communications over polymer optical fibers for in-building cabling and home networking. IEEE Photonics J. 2010, 2, 347–358. [Google Scholar] [CrossRef]
- Visani, D.; Okonkwo, C.; Loquai, S.; Yang, H.; Shi, Y.; van den Boom, H.; Ditewig, T.; Tartarini, G.; Schmauss, B.; Lee, J.; et al. Beyond 1 Gbit/s transmission over 1 mm diameter plastic optical fiber employing DMT for in-home communication systems. J. Lightwave Technol. 2011, 29, 622–628. [Google Scholar] [CrossRef]
- Beltrán, M.; Shi, Y.; Okonkwo, C.; Llorente, R.; Tangdiongga, E.; Koonen, T. In-home networks integrating high-capacity DMT data and DVB-T over large-core GI-POF. Opt. Express 2012, 20, 29769–29775. [Google Scholar] [CrossRef] [PubMed]
- Peng, L.; Haese, S.; Hélard, M. Optimized Discrete Multitone Communication Over Polymer Optical Fiber. J. Opt. Commun. Netw. 2013, 5, 1313–1327. [Google Scholar] [CrossRef]
- Miao, P.; Wu, L.; Peng, L. A novel modulation scheme for short range polymer optical fiber communications. J. Opt. 2013, 15, 105407. [Google Scholar] [CrossRef]
- Randel, S.; Breyer, F.; Lee, S.C.; Walewski, J.W. Advanced modulation schemes for short-range optical communications. IEEE J. Sel. Top. Quant. Electron. 2010, 16, 1280–1289. [Google Scholar] [CrossRef]
- Armstrong, J. OFDM for optical communications. J. Lightwave Technol. 2009, 27, 189–204. [Google Scholar] [CrossRef]
- Lee, S.C.; Breyer, F.; Randel, S.; Gaudino, R.; Bosco, G.; Bluschke, A.; Koonen, A.M. Discrete multitone modulation for maximizing transmission rate in step-index plastic optical fibers. J. Lightwave Technol. 2009, 27, 1503–1513. [Google Scholar] [CrossRef]
- Peng, L.; Hélard, M.; Haese, S. On Bit-loading for Discrete Multi-tone Transmission over Short Range POF Systems. J. Lightwave Technol. 2013, 31, 4155–4165. [Google Scholar] [CrossRef]
- Tsonev, D.; Sinanovic, S.; Haas, H. Complete modeling of nonlinear distortion in ofdm-based optical wireless communication. J. Lightwave Technol. 2013, 31, 3064–3076. [Google Scholar] [CrossRef]
- Mesleh, R.; Elgala, H.; Haas, H. On the performance of different OFDM based optical wireless communication systems. J. Opt. Commun. Netw. 2011, 3, 620–628. [Google Scholar] [CrossRef]
- Inan, B.; Lee, S.C.; Randel, S.; Neokosmidis, I.; Koonen, A.M.; Walewski, J.W. Impact of LED nonlinearity on discrete multitone modulation. J. Opt. Commun. Netw. 2009, 1, 439–451. [Google Scholar] [CrossRef]
- Neokosmidis, I.; Kamalakis, T.; Walewski, J.W.; Inan, B.; Sphicopoulos, T. Impact of nonlinear LED transfer function on discrete multitone modulation: Analytical approach. J. Lightwave Technol. 2009, 27, 4970–4978. [Google Scholar] [CrossRef]
- Miao, P.; Wu, L.; Peng, L. RCLED nonlinearity mitigation for polymer optical fiber communications. In Proceedings of the 13th International Conference on Optical Communications and Networks (ICOCN), Suzhou, China, 9–10 November 2014; pp. 1–4.
- Mesleh, R.; Elgala, H.; Haas, H. LED nonlinearity mitigation techniques in optical wireless OFDM communication systems. J. Opt. Commun. Netw. 2012, 4, 865–875. [Google Scholar] [CrossRef]
- Dimitrov, S.; Sinanovic, S.; Haas, H. Clipping noise in OFDM-based optical wireless communication systems. IEEE Trans. Commun. 2012, 60, 1072–1081. [Google Scholar] [CrossRef]
- Muhonen, K.J.; Kavehrad, M.; Krishnamoorthy, R. Look-up table techniques for adaptive digital predistortion: A development and comparison. IEEE Trans. Veh. Technol. 2000, 49, 1995–2002. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Yang, J.; Wu, B.; Li, Q. Extended state observer-based sliding mode control for PWM-based DC–DC buck power converter systems with mismatched disturbances. IET Control Theory Appl. 2015, 9, 579–586. [Google Scholar] [CrossRef]
- Jardin, P.; Baudoin, G. Filter lookup table method for power amplifier linearization. IEEE Trans. Veh. Technol. 2007, 56, 1076–1087. [Google Scholar] [CrossRef]
- Chow, P.S.; Cioffi, J.M.; Bingham, J. A practical discrete multitone transceiver loading algorithm for data transmission over spectrally shaped channels. IEEE Trans. Commun. 1995, 43, 773–775. [Google Scholar] [CrossRef]
- Schueppert, M.; Kruglov, R.; Loquai, S.; Bunge, C.-A. Nonlinearities Originated in a Red RC-LED and Their Impact on Spectrally Efficient Modulation. IEEE Photonics Technol. Lett. 2015, 27, 2007–2010. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DMT Parameters | Values |
|---|---|
| Sampling frequency(GHz) | 1 |
| Fast fourier transform (FFT) length | 2048 |
| Subcarrier spacing (MHz) | 0.488 |
| Subcarrier number N | 256 |
| Cyclic prefix (CP) ratio (μs) | 0.032 |
| DMT symbol duration (μs) | 2.08 |
| Signal bandwidth (MHz) | 125 |
| Pre-distorter | Pilot Overheads | Convergence Time (s) | BER Reduction (dB) | Parameters Adaptive | Accuracy |
|---|---|---|---|---|---|
| The conventional | 79 | 12 | 4 | No | Middle |
| The proposed | 21 | 3 | 12 | Yes | High |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, P.; Wu, L.; Chen, P.; Wang, X. RCLED Optimization and Nonlinearity Compensation in a Polymer Optical Fiber DMT System. Appl. Sci. 2016, 6, 260. https://doi.org/10.3390/app6090260
Miao P, Wu L, Chen P, Wang X. RCLED Optimization and Nonlinearity Compensation in a Polymer Optical Fiber DMT System. Applied Sciences. 2016; 6(9):260. https://doi.org/10.3390/app6090260
Chicago/Turabian StyleMiao, Pu, Lenan Wu, Peng Chen, and Xianbo Wang. 2016. "RCLED Optimization and Nonlinearity Compensation in a Polymer Optical Fiber DMT System" Applied Sciences 6, no. 9: 260. https://doi.org/10.3390/app6090260