
Computational Vibroacoustics in Low- and Medium- Frequency Bands: Damping, ROM, and UQ Modeling

1
Structural Mechanics and Coupled Systems Laboratory, Conservatoire National des Arts et Metiers (CNAM), 2 rue Conte, 75003 Paris, France
2
Laboratoire Modélisation et Simulation Multi-Echelle (MSME UMR 8208 CNRS), Université Paris-Est, 5 bd Descartes, 77454 Marne-la-Vallée, France
*
Author to whom correspondence should be addressed.
Appl. Sci. 2017, 7(6), 586; https://doi.org/10.3390/app7060586
Submission received: 10 May 2017
/
Revised: 30 May 2017
/
Accepted: 3 June 2017
/
Published: 7 June 2017
(This article belongs to the Special Issue Advances in Vibroacoustics and Aeroacustics of Aerospace and Automotive Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Within the framework of the state-of-the-art, this paper presents a summary of some common research works carried out by the authors concerning computational methods for the prediction of the responses in the frequency domain of general linear dissipative vibroacoustics (structural-acoustic) systems for liquid and gas in the low-frequency (LF) and medium-frequency (MF) domains, including uncertainty quantification (UQ) that plays an important role in the MF domain. The system under consideration consists of a deformable dissipative structure, coupled with an internal dissipative acoustic fluid including a wall acoustic impedance, and surrounded by an infinite acoustic fluid. The system is submitted to given internal and external acoustic sources and to prescribed mechanical forces. An efficient reduced-order computational model (ROM) is constructed using a finite element discretization (FEM) for the structure and the internal acoustic fluid. The external acoustic fluid is treated using a symmetric boundary element method (BEM) in the frequency domain. All the required modeling aspects required for the analysis in the MF domain have been introduced, in particular the frequency-dependent damping phenomena and model uncertainties. An industrial application to a complex computational vibroacoustic model of an automobile is presented.
1. Introduction
This paper presents a summary of some common research works carried out by the authors concerning computational methods for the prediction of the responses in the frequency domain of general linear dissipative vibroacoustics (structural-acoustic) systems for liquid and gas in the low- frequency (LF) and medium-frequency (MF) domains, including uncertainty quantification (UQ) that plays an important role in the MF domain. The contribution of this paper is the presentation of an efficient computational methodology adapted to large-scale computational vibroacoustic models which corresponds to a combination of established methods, and an application of this computational methodology is presented for an industrial vibroacoustic system. Considering all the aspects that are developed in this paper in order to present a complete strategy for the modeling and computational approaches—external acoustic fluid modeling, internal acoustic fluid including a dissipation term and frequency-dependent wall impedance, structure with frequency-dependent constitutive equation, reduced-order model for weak and strong coupling between the structure and the internal acoustic fluid, complete methodology for uncertainty quantification—a synthetic presentation has been adopted for readability, and we refer the reader to the given appropriate bibliography for the details. Nevertheless, since the model uncertainties induced by the modeling errors—which cannot be taken into account by using the usual probabilistic parametric approach of uncertain parameters or of other deterministic approaches of uncertainties—is relatively novel for the readers who are not familiarized with such a formulation, this part is more detailed in terms of equations.
More specifically, this paper is devoted to computational methods for the prediction of the frequency responses of linear dissipative vibroacoustic (structural-acoustic) systems in the low- and medium-frequency ranges. The vibroacoustic system consists of a deformable dissipative structure, coupled with a bounded internal dissipative acoustic fluid including a wall acoustic impedance, immersed in an unbounded acoustic fluid, and submitted to internal and external acoustic sources, as well as mechanical forces.
Computational vibroacoustic predictions play an important and increasing role in analyzing industrial complex systems, and many works have been published in this field.
The physics on which the computational vibroacoustics formulations are based can be found in numerous books, such as in [1,2,3,4,5,6,7,8,9,10,11].
For the spatial discretization of structures and bounded internal acoustic fluids, the computational vibroacoustics are generally based on the finite element method (FEM) (see for instance [12,13,14,15], and [16] for the corresponding isogeometric formulation).
For the spatial discretization of the unbounded external acoustic fluid, either finite element method or boundary element method (BEM) are used. Concerning the use of the local discretization of the unbounded external acoustic fluid, we refer the reader to [17,18,19,20,21,22,23,24,25,26], and for the BEM that is based on the finite element discretization of the boundary integral equation methods, let us cite [27,28,29,30,31,32,33,34,35,36,37]. Concerning the BEMs that are specifically devoted to the unbounded external acoustic fluid, we refer the reader to [38,39,40,41,42,43,44,45,46,47,48].
Reduced-order models (ROMs) are very attractive and efficient for analyzing large computational vibroacoustics models that have a significant number of design parameters—also called parametric high-dimensional computational models (HDMs)—for design and optimization, for constructing online models for active control, and for taking uncertainties into account. Particularly for parametric nonlinear HDMs, many approaches which can also be applied to parametric linear HDMs have been proposed, including hyper-reduced ROM, which guarantees feasibility [49,50,51,52,53,54,55,56,57,58,59,60,61]. With these methods, the parameter admissible space must be sampled at a few points using a greedy sampling algorithm (e.g., [62]), and a set of problems must be solved, yielding a set of parametric solution snapshots. This generally results from a proper orthogonal decomposition (POD), which are compressed using, for example, singular value decomposition (SVD) to construct a global reduced-order basis (ROB). For linear vibroacoustic HDMs, the most common choice for the parametric ROB consists of taking the modes of the different parts that constitute the vibroacoustic system (e.g., the elastic modes of the structure and the acoustic modes of the internal acoustic fluid)[41,63,64,65,66,67,68,69,70,71,72,73,74].
The design of a vibroacoustic system is used to manufacture a real system and to construct a nominal computational model with the methodologies listed above, and which will be presented in the next sections. In practice, the real system can exhibit variabilities in its responses due to fluctuations in the manufacturing process and due to small variations of the configuration around a nominal configuration associated with the design. The vibroacoustic computational model has parameters such as geometry, mechanical properties, and boundary conditions, which can be uncertain, inducing uncertainties in the computational model parameters. On the other hand, the modeling process induces some modeling errors defined as the model uncertainties. It is important to consider both the model-parameters uncertainties and the modeling uncertainties in order to improve the predictions. Two main types of approaches can be used to model uncertainties in the framework of the probability theory [75]. The first is the parametric probabilistic approach, which consists of modeling the uncertain parameters by random variables (e.g., [75,76,77,78,79,80,81,82,83,84]), but which does not have the capability to take modeling uncertainties into account. Two main methods can then be used to take them into account. The first is the output-prediction-error method, which requires experimental data [85,86] and uses the Bayesian method [87,88], but for which the computational model cannot be updated using experimental data, which constitutes a lock for robust design and optimization. The second one is the nonparametric probabilistic approach of modeling uncertainties induced by modeling errors proposed in [75,89,90,91], based on the maximum entropy principle [92] in the context of Information Theory [93] and on the random matrix theory [94], and extended for nonlinear dynamical systems in [95].
The outline of this paper is the following:
- Statement of the problem in the frequency domain.
- External inviscid acoustic fluid equations in the frequency domain and acoustic impedance boundary operator.
- Internal dissipative acoustic fluid equations in the frequency domain.
- Structure equations with frequency-dependent constitutive equation.
- Boundary value problem in terms of the structural displacement and the internal pressure field.
- Vibroacoustic computational model.
- Reduced-order vibroacoustic computational model.
- Uncertainty quantification for the vibroacoustic computational model.
- Experimental validation with a complex computational vibroacoustic model of an automobile.
2. Statement of the Problem in the Frequency Domain
The physical space refers to a cartesian reference system, and the generic point of is denoted by . For any function , the notation designates the partial derivative with respect to . The classical convention for summations over repeated Latin indices is used, but not over Greek indices. The vibration problem is formulated in the frequency domain. Therefore, the Fourier transform is introduced for various quantities involved. For instance, for the displacement field , the simplified notation is introduced and consists of using the same symbol for a quantity and its Fourier transform, in which the circular frequency (rad/s) is real. The vibroacoustic system is assumed to be in linear vibrations around a static equilibrium state taken as a natural state at rest.
Structure. In general, the structure of a complex vibroacoustic system is composed of a main part called the master structure that is accessible to conventional modeling including uncertainties modeling, and a secondary part called the fuzzy substructure related to the structural complexity and including for example many equipment units attached to the master structure. In the present paper, we will not consider fuzzy substructures, and concerning fuzzy structure theory, we refer the reader to Chapter 15 of [41] for a synthesis, and to [96] for an extension of the theory to the modeling of an uncertain complex vibroacoustic system with fuzzy interface. At equilibrium, the structure occupies the three-dimensional bounded domain with a boundary that is made up of a part that is the coupling interface between the structure and the external acoustic fluid, a part that is a coupling interface between the structure and the internal acoustic fluid, and finally, a part that is another part of the coupling interface between the structure and the internal acoustic fluid with acoustic properties. The structure is assumed to be free (free-free structure). The outward unit normal to is denoted as (see Figure 1). In , the displacement field is denoted by . A surface force field is given on , and a body force field is given in . The structure is a dissipative medium for which the frequency-dependent constitutive equation is detailed in Appendix A.
Internal dissipative acoustic fluid. Let be the internal bounded domain filled with a dissipative acoustic fluid (gas or liquid) that is described in Section 4. The boundary of is . The outward unit normal to is denoted by , and we have on (see Figure 1). The acoustic properties of boundary are modeled by a wall acoustic impedance satisfying the hypotheses defined in Section 4.2. In , the pressure field is denoted by and the velocity field by . It is assumed that there is no Dirichlet boundary condition on any part of . An acoustic source density is given inside .
External inviscid acoustic fluid. The structure is surrounded by an external inviscid acoustic fluid (gas or liquid) that is detailed in Appendix B. The fluid occupies the infinite three-dimensional domain whose boundary is . The inward unit normal to is , defined above (see Figure 1). In , the pressure field is denoted by . There is no Dirichlet boundary condition on . An acoustic source density is given in . This acoustic source density induces a pressure field on (defined in Appendix B). For the sake of brevity, the case of an incident plane wave is not considered here, and the reader is referred to [41] for this case.
3. External Inviscid Acoustic Fluid Equations in the Frequency Domain and Acoustic Impedance Boundary Operator
Let and be the constant mass density and the constant speed of sound of the external acoustic fluid at equilibrium. Let be the wave number at frequency . The pressure is the solution of the classical exterior Neumann problem related to the Helmholtz equation with a source term [2,3,4,41],
with , where is the derivative in the radial direction and where is the normal displacement field on induced by the deformation of the structure. Equation (3) corresponds to the outward Sommerfeld radiation condition at infinity. In Appendix B, it is shown that the value of the pressure field on the external fluid–structure interface is related to the given external pressure field on and to the normal displacement field on the external fluid–structure interface by the equation
in which is the acoustic impedance boundary operator. It can be proven that for all given real and for all given sufficiently regular on , the boundary value problem defined by Equations (1)–(3) (e.g., [97,98]) admits a unique solution.
4. Internal Dissipative Acoustic Fluid Equations in the Frequency Domain
4.1. Internal Dissipative Acoustic Fluid Equations
The internal fluid is called a dissipative acoustic fluid, and is assumed to be homogeneous, compressible, dissipative, and at rest in the reference configuration. This dissipative acoustic fluid—for which the dissipation due to thermal conduction is neglected and for which the motions are assumed to be irrotational—is driven by the Helmholtz equation with an additional internal dissipative term. For additional details concerning dissipation in acoustic fluids, we refer the reader to [2,4,6,9]. Let be the mass density and let be the constant speed of sound in the acoustic fluid at equilibrium in the reference configuration . The Helmholtz equation with a dissipative term and a source term Q is written as [41]
in which is given by
The constant is the dynamic viscosity, is the kinematic viscosity, and is the second viscosity which can depend on . Therefore, can depend on frequency . To simplify the notation, we write instead of . Taking in Equation (5) yields the usual Helmholtz equation with an acoustic source for wave propagation in an inviscid acoustic fluid. It should be noted that the dissipation term is proportional to and not to p (what modifies the boundary condition defined after), and that the acoustic source term exhibits a term.
4.2. Boundary Conditions
(i) Let be the velocity in the acoustic fluid. The interface condition on for the inviscid dissipative acoustic fluid is written as on . In terms of p, the Neumann boundary condition is written as
(ii) The wall acoustic impedance on is defined by the following constitutive equation:
in which is the wall acoustic impedance defined for , with complex values. Wall acoustic impedance must satisfy appropriate conditions in order to ensure that the problem is correctly stated (see [41] for a general formulation). In terms of p, the Neumann boundary condition on is written as
4.3. Case of a Free Surface for a Liquid
In a case of an acoustic liquid with a free surface , neglecting gravity effects, the following Dirichlet condition is written as
5. Structure Equations with Frequency-Dependent Constitutive Equation
Structure Equations in the Frequency Domain
The equation of the structure occupying domain is written as
in which is the mass density of the structure. For a linear viscoelastic model, the symmetric stress tensor is written as
in which the symmetric strain tensor is such that
and where the tensors and depend on and are detailed in Appendix A for the LF and MF ranges.
On the fluid–structure external interface , the boundary condition is such that
Using Equation (4) yields
Since , the boundary condition on is written as
in which p is the internal acoustic pressure field defined in Section 4.
6. Boundary Value Problem in Terms of
The boundary value problem in terms of is written as follows. For all real and for given , , , and , find and , such that
In the case of a free surface in the internal acoustic cavity (see Section 4.3), the boundary condition defined by Equation (10) must be added.
Remarks
- It is important to note that the external acoustic pressure field has been eliminated as a function of using the acoustic impedance boundary operator (see Equation (4) of Section 3 and Appendix B), while the internal acoustic pressure field p is kept.
7. Vibroacoustic Computational Model
The finite element method is used to construct the spatial discretization of the variational formulation of the boundary value problem defined by Equations (17)–(22), with the additional boundary condition defined by Equation (10) in the case of a free surface for an internal liquid. We consider a finite element mesh of structure and a finite element mesh of internal acoustic fluid . It is assumed that the two finite element meshes are compatible on interface . The finite element mesh of surface is the trace of the mesh of .
7.1. Matrix Equation of the Computational Model
Let be the complex vector of the degrees-of-freedom (DOFs), which are the values of at the nodes of the finite element mesh of domain . For the internal acoustic fluid, let be the complex vectors of the n DOFs, which are the values of at the nodes of the finite element mesh of domain . The complex matrix equation of the computational model is written as
in which the complex matrix is defined by
in which is the transposed matrix of . In Equation (24), the symmetric complex matrix is defined by
in which , , and are symmetric real matrices, which represent the mass matrix, the damping matrix, and the stiffness matrix of the structure. Matrix is positive and invertible (positive definite), and matrices and are positive and not invertible (positive semidefinite) due to the presence of six rigid body motions (free-free structure). The symmetric complex matrix is defined by
in which , , and are symmetric real matrices. Matrix is positive and invertible, and matrices and are positive and not invertible with rank . In the case of a free surface in the internal acoustic cavity (see Section 4.3), the boundary condition defined by Equation (10) is added, and consequently the corresponding matrix is positive definite, and is thus invertible. The internal fluid–structure coupling matrix is related to the coupling between the structure and the internal fluid on the internal fluid–structure interface, and is a real matrix that is only related to the values of and on the internal fluid–structure interface. The wall acoustic impedance matrix is a symmetric complex matrix depending on the wall acoustic impedance on , and which is only related to the values of on boundary . The boundary element matrix —which depends on —is a symmetric complex matrix that is only related to the values of on the external fluid–structure interface . This matrix is written as
in which is the full symmetric complex matrix defined in Appendix B, and where is a sparse real matrix related to the finite element discretization.
7.2. Construction of the Matrices of the Computational Model
The expressions of the real or complex bilinear forms whose discretization allows the corresponding real or complex matrices to be constructed are given hereinafter. For such a construction, we consider the fields and the corresponding fields as test functions that are real (and not complex).
7.2.1. Matrices Related to the Equations of the Structure
- Symmetric real mass matrix is positive definite, and corresponds to .
- Symmetric real damping matrix is positive semidefinite with a kernel of dimension 6, and corresponds to .
- Symmetric real stiffness matrix is positive semidefinite with a kernel of dimension 6, and corresponds to .
7.2.2. Matrices Related to the Equations of the Internal Acoustic Fluid
- Symmetric real matrix is positive semidefinite with a kernel of dimension 1, and corresponds to . In the case of a free surface in the internal acoustic cavity (see Section 4.3), the boundary condition defined by Equation (10) is added, and consequently, the corresponding matrix is positive definite.
- Symmetric real matrix is positive definite, and corresponds to .
- Symmetric complex matrix comes from , in which is a complex-valued function and where is the elementary surface area.
7.2.3. Matrices Related to the Coupling Terms
- Rectangular real matrix corresponds to .
7.2.4. Vector of Mechanical and Acoustical Excitations
- Complex vector of external forces corresponds to .
- Complex vector of internal acoustic sources corresponds to .
Remark concerning the construction of the solution. The vibroacoustic computational model without model uncertainties (deterministic equations) can be numerically solved by , but for large-scale computational models, the numerical cost can be relatively high. This is why reduced-order models are generally introduced. In addition, if the nonparametric probabilistic approach is used to take the uncertainties induced by modeling errors into account, then a reduced-order model must be introduced. The methodology proposed for constructing a reduced-order model is presented in the next section.
8. Reduced-Order Vibroacoustic Computational Model
One possible method for constructing a reduced-order model would consist of choosing as a reduced-order basis the elastoacoustic modes (coupled vibroacoustic modes) of an associated conservative system that must be defined and which will be directly computed. The direct computation of these elastoacoustic modes can be very expensive for solving the eigenvalue problem of large-scale computational models, even if advanced algorithms based on Krylov methods are used. However, with such an approach, the nature of the couplings between the subsystems through the knowledge of the eigenfrequencies and the mode shapes of each subsystem can be difficult to analyze. In addition, the use of the elastoacoustic modes does not allow anymore for adapting the level of uncertainties as a function of the matrices of the coupled system (inertial forces, damping forces, stiffness forces in the structure, and equivalent forces in the internal dissipative acoustic fluid, internal fluid–structure coupling forces). This aspect is particularly important for the analyses in the medium-frequency range. Certainly, knowledge of the elastoacoustic modes can also be very useful for analyzing the consequences of the couplings. Their computation can be considerably decreased by using a reduced-order model such as the one proposed hereinafter, which avoids the expensive direct computation. Finally, if the direct computation of the elastoacoustic modes can be very useful for the cases for which there is a strong effect of the internal acoustic fluid on the structural modes (e.g., the case of a strong coupling such as a structure coupled with an internal liquid or of a lightweight structure coupled with and internal gas), the use of the reduced-order model presented in Section 8 is also very efficient (as explained in Section 8.1.2), because the structural modes are computed taking into account the quasistatic effect of the internal fluid (the added mass effect). Finally, in order to simplify the presentation of Section 8—which is devoted to the construction of the reduced-order model—we have considered the case for which the internal acoustic fluid is a gas and the case for which the internal acoustic fluid is a liquid in order to illustrate the two important cases of a weak coupling and of a strong coupling. Clearly, these two cases cover many coupling situations, such as a lightweight structure coupled with an internal gas for which a strong coupling can appear; in such a case, the formulation presented in Section 8.1.2 must be used. The construction of the reduced-order computational model requires appropriate projection bases to be introduced, as explained below.
- Projection basis for the structure.
- -
- If the internal acoustic fluid is a gas, the projection basis can be chosen as the undamped elastic structural modes of the structure in vacuo for which the constitutive equation corresponds to elastic materials (see Equation (A5)), and consequently, the stiffness matrix has to be constructed for .
- -
- If the internal acoustic fluid is a liquid (with or without free surface), for the structure, the projection basis can constructed as for a gas but by taking into account the effects of liquid’s added mass.
- Projection basis for the internal acoustic fluid.
- -
- We consider the undamped acoustic modes of an internal acoustic cavity with fixed boundary (and rigid wall) and without wall acoustic impedance. Two cases must be considered: one for which the internal pressure varies with a variation of the volume of the cavity (a cavity with a sealed wall called a closed cavity), and the other one for which the internal pressure does not vary with the variation of the volume of the cavity (a cavity with a non-sealed wall, called an almost-closed cavity).
8.1. Computation of the Projection Basis for the Structure
8.1.1. Case of a Weak Coupling of the Structure with the Internal Acoustic Fluid
The undamped elastic structural modes of structure in vacuo are computed with the constitutive equation corresponding to elastic materials. Setting , we have to solve the generalized symmetric real eigenvalue problem,
This generalized eigenvalue problem admits a zero eigenvalue with multiplicity 6 (corresponding to the six rigid body motions), and admits an increasing sequence of strictly positive eigenvalues (corresponding to the elastic structural modes),
Let be the eigenvectors (the elastic structural modes) associated with . Let . We introduce the real matrix of the elastic structural modes associated with the first strictly positive eigenvalues,
We have the orthogonality properties,
in which is a diagonal matrix of positive real numbers and where is the diagonal matrix of the eigenvalues such that (the eigenfrequencies are ).
8.1.2. Case of a Strong Coupling of the Structure with the Internal Acoustic Fluid
For the computation of the appropriate basis of the structure, the practical numerical procedure is given hereinafter. Equation (28) is replaced by
in which is the positive symmetric real matrix (called the added mass matrix), which corresponds to the quasi-static effect of the internal acoustic fluid on the structure. It should be noted that the non-zero elements of matrix are only related to the DOFs of the internal fluid–structure interface. This generalized eigenvalue problem admits a zero eigenvalue with multiplicity 6 (corresponding to the six rigid body motions) and admits an increasing sequence of strictly positive eigenvalues,
The eigenvectors associated with constitute a basis for the elastic structure. For , we introduce the real matrix of the basis vectors associated with the first strictly positive eigenvalues,
We have the orthogonality properties,
in which is a diagonal matrix of positive real numbers such that , and where is the diagonal matrix of the eigenvalues such that . It should be noted that is not an eigenfrequency of the structure in vacuo, but is an eigenfrequency of the structure with an added mass effect. For a closed acoustic cavity and for an internal acoustic liquid with a free surface, the construction of matrix is given hereinafter.
Construction of added mass matrix for a closed acoustic cavity. For a closed acoustic cavity, the deformations of the interface can induce a volume variation of the cavity. The positive symmetric real matrix is written as
in which is the positive symmetric real matrix which is constructed in solving the following linear matrix equation
Under the constraint matrix equation
in which is the identity matrix, is the zero matrix, and where is the real matrix constructed by
where is the matrix such that for all . It should be noted that the numerical construction of matrix can be viewed as the result of a Schur complement calculation with the constraint defined by Equation (40).
Construction of added mass matrix for an internal liquid with a free surface. For an internal liquid with a free surface on which (see Equation (10)), the introduced added mass corresponds to an incompressible fluid. The positive symmetric real matrix is written as
in which is the positive symmetric real matrix which is constructed in solving the following linear matrix equation
in which is invertible due to the free surface in the internal acoustic cavity. It should be noted that the numerical construction of matrix can be viewed as the result of a Schur complement calculation.
8.2. Computation of the Projection Basis for the Internal Acoustic Fluid
8.2.1. Case of a Gas or a Liquid without Free Surface
The undamped acoustic modes of a closed (sealed wall) or an almost closed (non-sealed wall) acoustic cavity are computed. Setting , we have the generalized symmetric real eigenvalue problem
This generalized eigenvalue problem admits a zero eigenvalue with multiplicity 1, denoted as (corresponding to constant eigenvector denoted as ) and admits an increasing sequence of strictly positive eigenvalues (corresponding to the acoustic modes),
Let be the eigenvectors (the acoustic modes) associated with .
- Closed (sealed wall) acoustic cavity. Let be . We introduce the real matrix of the constant eigenvector and of the acoustic modes associated with the first strictly positive eigenvalues,
- Almost-closed (non-sealed wall) acoustic cavity. Let be . We introduce the real matrix of the N acoustic modes associated with the first N strictly positive eigenvalues,
We have the orthogonality properties,
in which is a diagonal matrix of positive real numbers and where is the diagonal matrix of the eigenvalues such that (for non-zero eigenvalue, the eigenfrequencies are ).
8.2.2. Case of a Liquid with a Free Surface
In such a case, there is a free surface in the internal acoustic cavity (see Section 4.3) for which the boundary condition defined by Equation (10) is added, and consequently the corresponding matrix is positive definite. The undamped acoustic modes of the acoustic cavity are computed by solving the generalized symmetric real eigenvalue problem
that admits an increasing sequence of n strictly positive eigenvalues (corresponding to the acoustic modes), , associated with the eigenvectors (the acoustic modes). Let . We introduce the real matrix of the N acoustic modes associated with the first N positive eigenvalues,
8.3. Construction of the Reduced-Order Computational Model
Using the projection basis defined by Equation (35) for the structure, and the projection basis defined by Equations (46), (47), or (51) for the acoustic fluid, the projection of Equation (23) yields the reduced-order computational model of order and , which is written as
The complex vectors and of dimension and N are the solution of the following equation
in which the complex matrix is defined by
In Equation (55), the symmetric complex matrix is defined by
in which , , and are positive-definite symmetric real matrices such that
The symmetric complex matrix is defined by
in which , , and are symmetric real matrices. For a closed (sealed wall) acoustic cavity, matrix is positive and not invertible with rank , while for an almost-closed (non-sealed wall) acoustic cavity or for a liquid with a free surface (see Section 4.3), matrix is positive and invertible. Matrix is positive and invertible. The diagonal real matrix is written as
in which is defined by Equation (6). The real matrix is written as
The symmetric complex matrix is such that
and finally, the symmetric complex matrix is given by
The given forces are written as
9. Uncertainty Quantification for the Vibroacoustic Computational Model
For the reasons given in Section 1, the nonparametric probabilistic approach of uncertainties is proposed for performing uncertainty quantification for the vibroacoustic computational model. It is recalled that such an approach is a way of modeling the uncertainties induced by the modeling errors that cannot be taken into account with the usual approaches that only consider the uncertainties on the physical parameters of the computational model. This nonparametric approach allows for separately but globally describing the model uncertainties that exist for each matrix appearing in the vibroacoustic computational model. There are only a small number of hyperparameters in the nonparametric probabilistic approach, these hyperparameters being the parameters of the probability distributions of the random matrices. This small number of hyperparameters allows for carrying out the experimental identification of the probabilistic model, which can easily be performed by solving a statistical inverse problem as explained in the application presented in Section 10. This kind of approach yields robust predictions with respect to model uncertainties that can effectively be quantified, for instance, by constructing the confidence region of the quantities of interest.
In this section, we summarize the fundamental concepts and the construction related to the nonparametric probabilistic approach of both computational model-parameters uncertainties and modeling uncertainties in computational vibroacoustics, detailed in [75,84]. The method presented has recently been implemented in MSC-Nastran [99].
The methodology is applied to the reduced-order vibroacoustic computational model defined by Equations (52)–(58). In order to simplify the presentation, it is assumed that there are no uncertainties in the boundary element matrix or in the wall acoustic impedance matrix . For fixed values of and N, the stochastic reduced-order computational vibroacoustic model of order and N is written as
in which, for all real , the complex random vectors and of dimension and N are the solution of the following random equation
and where the complex random matrix is written as
The symmetric complex random matrix is defined by
in which the probability distributions of the positive-definite symmetric real random matrices , , and are constructed in Section 9.2 and Section 9.3. The symmetric complex random matrix is written as
in which , and are symmetric real random matrices. Random matrix is positive definite. The diagonal real random matrix is written as
in which is deterministic and is defined by Equation (6). For a closed (sealed wall) acoustic cavity, random matrix is positive and not invertible with rank , while for an almost-closed (non-sealed wall) acoustic cavity or for a liquid with a free surface (see Section 4.3), random matrix is positive definite. The probability distributions of random matrices , , and of the real random matrix are constructed in Section 9.4, Section 9.5 and Section 9.6.
9.1. Preliminary Results for the Stochastic Modeling of the Random Matrices for the Stochastic Reduced-Order Computational Vibroacoustic Model
In the framework of the nonparametric probabilistic approach of uncertainties, the probability distributions and the generators of independent realizations of such random matrices are constructed using random matrix theory [89,94] and the maximum entropy principle [92,100] from Information Theory [93], in which Shannon introduced the notion of entropy as a measure of the level of uncertainties for a probability distribution. For instance, if is a probability density function on a real random variable X, the entropy of is defined by . The maximum entropy principle consists of maximizing the entropy (i.e., maximizing the uncertainties), under the constraints defined by the available information. Consequently, it is important to define the algebraic properties of the random matrices for which the probability distributions have to be constructed. Let E be the mathematical expectation. For instance, for real-valued random variable X, we have and . In order to construct the probability distributions of the random matrices introduced before, we need to define a basic ensemble of random matrices.
It is known that a real Gaussian random variable can take negative values. Consequently, the Gaussian orthogonal ensemble (GOE) of random matrices [94]—which is the generalization for the matrix case of the Gaussian random variable—cannot be used when a positiveness property of the random matrix is required [75]. Therefore, new ensembles of random matrices are required to implement the nonparametric probabilistic approach of uncertainties.
9.1.1. Ensemble of Random Matrices
Let be the set of all the positive-definite symmetric real matrices. Below, we summarize the construction [75,89,90] of an ensemble—denoted by —of random matrices with values in . An element of is a positive-definite random matrix denoted by .
Definition of the available information for constructing ensemble . For a random matrix belonging to , the available information consists of the mean value which is given and equal to the identity matrix, and an integrability condition that has to be imposed in order to ensure the decreasing of the probability density function around the origin,
in which is finite and where is the identity matrix.
Probability density function of a matrix . The probability density function, , defined on , of a random matrix satisfies the usual normalization condition,
where the volume element is written as . Let be the positive real number defined by
which will allow the dispersion of the probability model of random matrix to be controlled, and where is the Frobenius matrix norm of the matrix such that . For such that , the use of the maximum entropy principle under the constraints defined by Equations (70) and (71) yields for all in ,
in which is the positive constant of normalization and where and .
Generator of independent realizations of a random matrix in . The generator of independent realizations (which is required to solve the random equations with the Monte Carlo method) is constructed using the following algebraic representation of any random matrix that belongs to ,
in which is an upper triangular random matrix such that:
- the family of the random entries are independent random variables;
- for , the real-valued random variable is written as in which and where is a real-valued Gaussian random variable with zero mean and variance equal to 1;
- for , the positive-valued random variable is written as in which is a positive-valued Gamma random variable with probability density function in which .
9.1.2. Ensemble of Random Matrices
Let be a positive number (for instance, can be chosen as ). We then define the ensemble of all the random matrices such that
in which belongs to .
9.1.3. Cases of Several Random Matrices
It can be proven [75,91] that if there are several random matrices for which there is no available information concerning their statistical dependencies, then the use of the maximum entropy principle yields that the best model which maximizes the entropy (the uncertainties) is a stochastic model for which all these random matrices are independent.
9.2. Stochastic Modeling of Random Matrix
Since there is no available information concerning the statistical dependency of with the other random matrices of the problem, then random matrix is independent of all the other random matrices. The deterministic matrix is positive definite, and can consequently be written as , in which is an upper triangular real matrix. Using the nonparametric probabilistic approach of uncertainties, the stochastic model of the positive-definite symmetric random matrix is then defined by
where is a random matrix belonging to ensemble defined in Section 9.1.2 and whose probability distribution and generator of independent realizations depend only on dimension and on the dispersion parameter .
9.3. Stochastic Modeling of the Family of Random Matrices Indexed by
Since there is no available information concerning the statistical dependency of the family of random matrices with the other random matrices of the problem, then the family are independent of all the other random matrices. However, we will see below that the families of random matrices and will be statistically dependent. For stochastic modeling of and related to the linear viscoelastic structure, we propose to use the extension presented in [101], which is based on the Hilbert transform [102] in the frequency domain to express the causality properties (similarly to the transforms used in Section A.2 of Appendix A). The nonparametric probabilistic approach of uncertainties then consists of modeling the positive-definite symmetric real matrices and by random matrices and such that
- (i)
- For , the construction of the stochastic model of the family of random matrices is carried out as follows:
- Constructing the family of random matrices such thatwhere is such thatand where is a random matrix belonging to ensemble , defined in Section 9.1.2. Its probability distribution and its generator of independent realizations depend only on dimension and on the dispersion parameter that allows the level of uncertainties to be controlled.
- Constructing the family of random matrices using the equation(in which p.v means the Cauchy principal value that is defined in Equation (83)) or equivalently, using the two following equations that are useful for computation:
- Constructing the random matrix such thatin which the deterministic matrix is such thatThe random matrix is a random matrix belonging to ensemble defined in Section 9.1.2 whose probability distribution and generator of independent realizations depend only on dimension and on the dispersion parameter that allows the level of uncertainties to be controlled. Note that random matrix is independent of random matrix .
- Computing the random matrix such that
- Defining the random matrix such that
- Constructing the random matrix such thatIt must be verified that is effectively positive definite. In [101], the following sufficient condition is proven in order for to be a positive-definite random matrix for all : if for all real vector , the random function is decreasing on , then for all , is a positive-definite random matrix.
- (ii)
- For , the family is deduced from the family by using Equation (78).
- (iii)
- A numerical procedure for computing the integrals in Cauchy principal value can be found in [103].
9.4. Stochastic Modeling of Random Matrix
Since there is no available information concerning the statistical dependency of with the other random matrices of the problem, then random matrix is independent of all the other random matrices. The deterministic matrix is positive definite, and can consequently be written as
in which is an upper triangular real matrix. Using the nonparametric probabilistic approach of uncertainties, the stochastic model of the positive-definite symmetric random matrix is then defined by
where is a random matrix belonging to ensemble defined in Section 9.1.2, and whose probability distribution and generator of independent realizations depend only on dimension N and on the dispersion parameter .
9.5. Stochastic Modeling of Random Matrix
Since there is no available information concerning the statistical dependency of with the other random matrices of the problem, then random matrix is independent of all the other random matrices. For the stochastic modeling of , two cases must be considered.
- Closed (sealed wall) acoustic cavity. In such a case, the symmetric positive matrix is of rank and can then be written asin which is a rectangular real matrix. Using the nonparametric probabilistic approach of uncertainties, the stochastic model of the positive symmetric random matrix of rank is then defined [75,91] bywhere is a random matrix belonging to ensemble defined in Section 9.1.2 whose probability distribution and generator of independent realizations depend only on dimension and on the dispersion parameter .
- Almost-closed (non-sealed wall) acoustic cavity or internal liquid with a free surface. Matrix is positive definite and thus invertible. Consequently, it can be written asin which is an upper triangular real matrix. Using the nonparametric probabilistic approach of uncertainties, the stochastic model of this positive symmetric random matrix yieldswhere is a random matrix belonging to ensemble defined in Section 9.1.2 whose probability distribution and generator of independent realizations depend only on dimension N and on the dispersion parameter .
9.6. Stochastic Modeling of Random Matrix
Since there is no available information concerning the statistical dependency of with the other random matrices of the problem, then random matrix is independent of all the other random matrices. We use the construction proposed in [75,91] in the context of the nonparametric probabilistic approach. Let us assume that and that the real matrix is such that implies . If , the following construction must be applied to instead of . Using the polar decomposition of rectangular matrix , one can write
in which the real matrix is such that and where the symmetric square matrix is a positive-definite symmetric real matrix. Using the Cholesky decomposition, we then have
in which is an upper triangular matrix. The real random matrix is then written as
where is a random matrix belonging to ensemble defined in Section 9.1.2 and whose probability distribution and generator of independent realizations depend only on , N, and the dispersion parameter .
9.7. Hyperparameter of the Stochastic Reduced-Order Model (SROM) and Stochastic Solver
The dispersion parameter —also called hyperparameter—of each random matrix allows its level of dispersion (statistical fluctuations) to be controlled. The hyperparameters (dispersion parameters) of random matrices , , , , , and are represented by a vector-valued hyperparameter such that
which belongs to an admissible set and which allows the level of uncertainties to be controlled for each matrix introduced in the stochastic reduced-order model. Consequently, if no experimental data are available, then has to be used to analyze the robustness of the solution of the vibroacoustic problem with respect to uncertainties by varying in .
For a given value of hyperparameter in , there are two major classes of methods for solving the stochastic reduced-order model (SROM) defined by Equations (64)–(69). The first one belongs to the category of the spectral stochastic methods (see [76,77,83]). The second one belongs to the class of stochastic sampling techniques for which the Monte Carlo method is the most popular. Such a method is often called non-intrusive because it offers the advantage of only requiring the availability of classical deterministic codes. It should be noted that the Monte Carlo numerical simulation method (e.g., [104,105]) is a very effective and efficient one because it has the four following advantages:
- it is a non-intrusive method,
- it is adapted to massively parallel computation without any software developments,
- it is such that its convergence can be controlled during the computation,
- the speed of convergence is independent of the dimension.
If experimental data are available, there are several possible methodologies (one is the maximum likelihood method [87]) to identify the optimal values of hyperparameter (these aspects are not given here, and we refer the reader to [75,84]). Several works have been published concerning experimental validation of the nonparametric probabilistic approach of both the computational model-parameter uncertainties and the model uncertainties induced by modeling errors (e.g., [96,106,107,108,109,110,111]).
10. Experimental Validation with a Complex Computational Vibroacoustic Model of an Automobile
We present an experimental validation of the nonparametric probabilistic approach of uncertainties for a complex computational vibroacoustic model of an automobile [75,110].
Description of the vibroacoustic system. The vibroacoustic system is an automobile of a given type with several optional extra, for which a single mean computational model is developed. The experimental variabilities are due to the manufacturing process and to the optional extra. The objective is to predict the booming noise for which the engine rotation is rpm (rotations per minute), corresponding to the frequency band [50, 160] Hz, for which the input forces are applied to the engine supports, and for which the output observation is the acoustic pressure at a given point localized in the acoustic cavity.
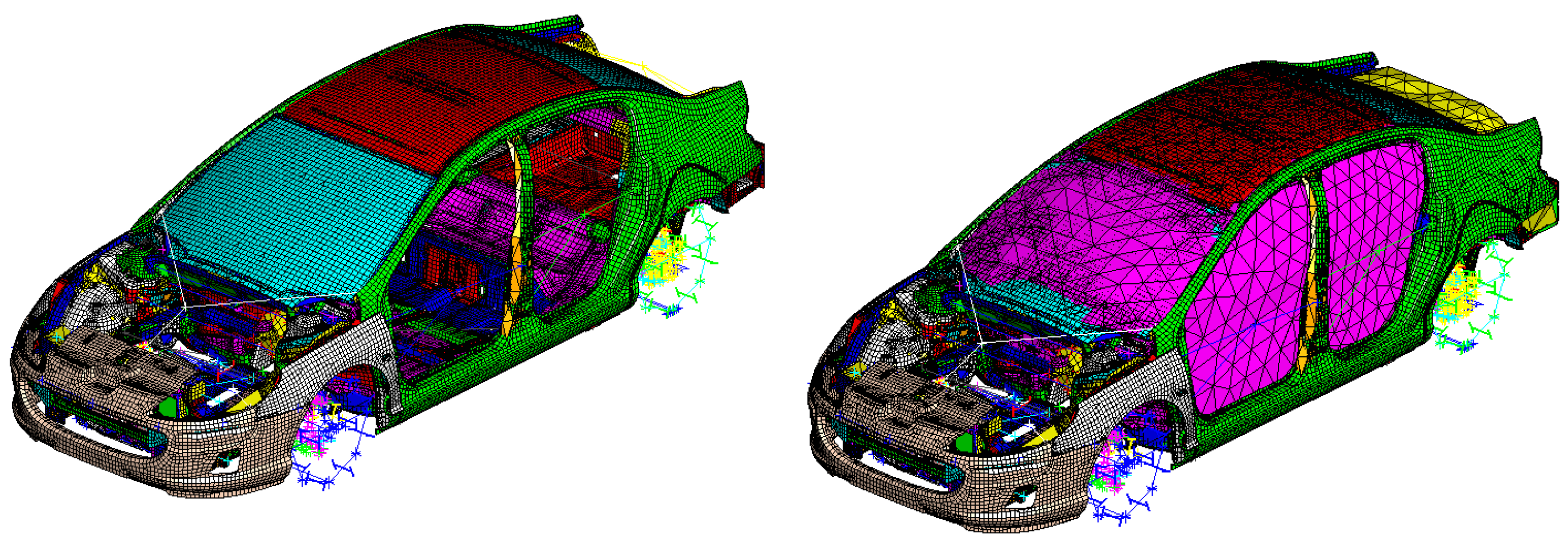
Nominal computational model and stochastic reduced-order model. The nominal computational model is a finite element model of the structure and of the acoustic cavity shown in Figure 2. The structure is modeled with structural DOFs of displacement, and the acoustic cavity is modeled with 8139 acoustical DOFs of pressure. The structural reduced-order basis is such that and the acoustical reduced-order basis is such that . The hyperparameters of the stochastic reduced-order model are for the structure, for the acoustic cavity, and for the vibroacoustic coupling.
Experimental identification of hyperparameter . The acoustical input is an acoustic source placed inside the acoustic cavity. The acoustical measurements have been performed for cars of the same type with different configurations corresponding to different seat positions, different internal temperatures, and different numbers of passengers. The acoustical pressures have been measured with microphones distributed inside the acoustic cavity. For the statistical inverse problem that is required for performing the experimental identification of hyperparameter , the observation is the real-valued random variable U defined by
in which are the components of , which correspond to the observed DOFs, and which are computed with the SROM defined by Equations (64)–(69). Let be the corresponding measurements for the cars. The identification of hyperparameter is performed by using the maximum likelihood method [87],
For , the value of the probability density function (pdf) of the random variable U is estimated with the kernel density estimation method by using the SROM for which the stochastic solver has been chosen as the Monte Carlo method with realizations.
Experimental identification of hyperparameter . The structural inputs are forces applied to the engine supports. The measurements of the accelerations in the structure have been performed for cars of the same type. The random vector-valued observation is such that
in which are the six components of which correspond to the observed structural DOFs, and which are computed with the SROM defined by Equations (64)–(69). Let be the corresponding measurements for the cars. The identification of the hyperparameter has been performed by using the least-square method. The Monte Carlo method has been used as the stochastic solver with realizations.
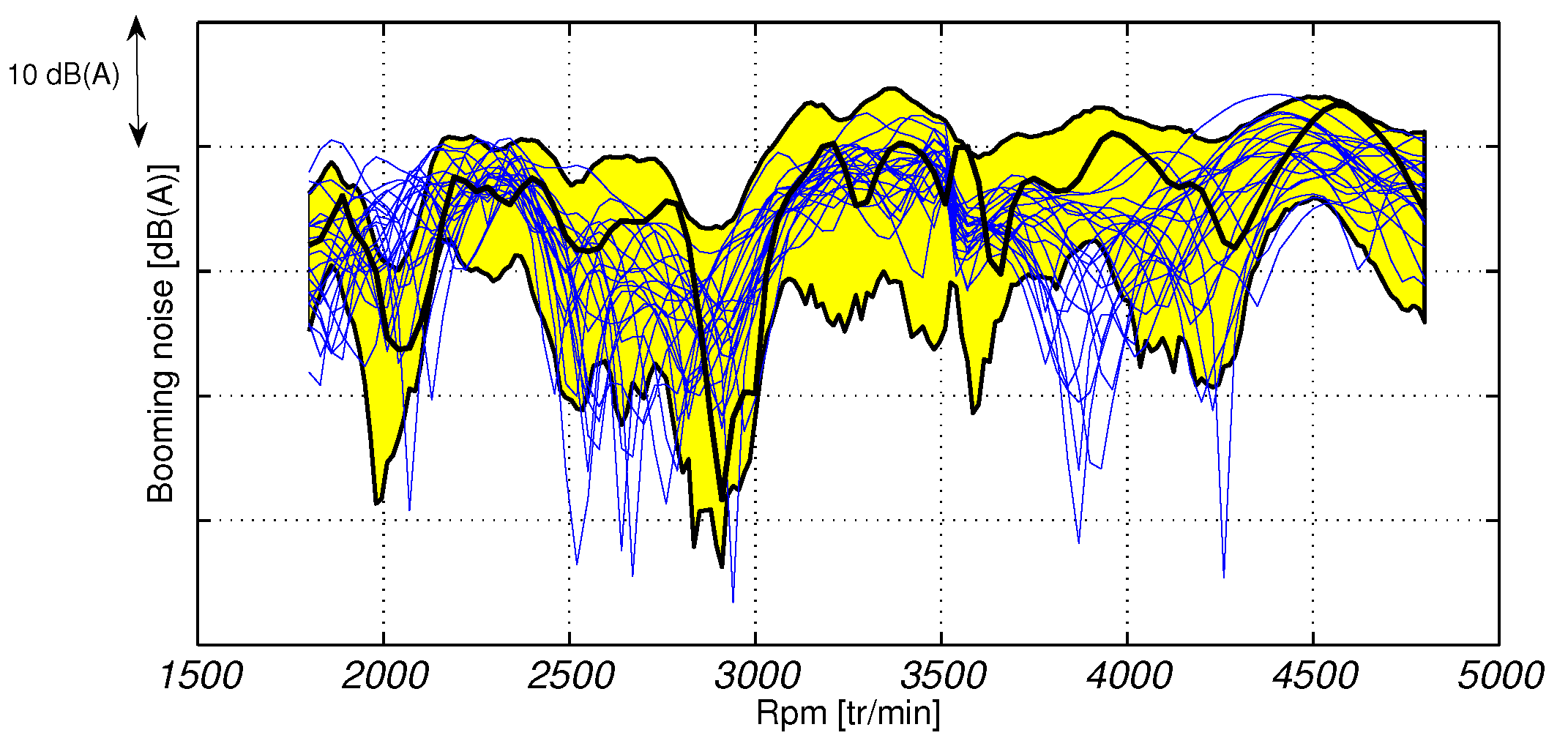
Experimental validation. The hyperparameters are fixed to their identified values, and , while is fixed to a given value. The SROM defined by Equations (64)–(69) is solved by using the Monte Carlo method with realizations. The prediction—with the identified SROM—of the confidence region of the internal noise at a given point of observation due to the engine excitation is displayed in Figure 3. It can be seen that this prediction is good for representing the great variabilities of the measurements, while the response given by the ROM (the nominal computational model) gives only a rough idea of the real system.
11. Conclusions
We have presented a computational methodology that is adapted to the vibroacoustics predictions of complex industrial systems in the low- and medium-frequency bands. The vibroacoustic system is made up of a dissipative structure (possibly with a viscoelastic behavior), coupled with a bounded acoustic cavity filled with a dissipative acoustic fluid, and coupled with an acoustic fluid occupying an unbounded external domain. We have presented a reduced-order computational model that is efficient for an acoustic cavity which is filled with a liquid or a gas. For the medium-frequency band, the uncertainty quantification is particularly important. For complex industrial vibroacoustic systems, the main source of uncertainties is due to modeling errors. We have summarized the nonparametric probabilistic approach of model uncertainties, and we have detailed the construction of the random matrices for the case of a viscoelastic structure in order to respect the causality of the physical system. Finally, the application to a real automobile with experimental comparisons was presented.
Author Contributions
The two authors, Roger Ohayon and Christian Soize, have equally contributed on all the aspects of the paper and to write it.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations and mathematical symbols are used in this manuscript:
| BEM | Boundary Element Method |
| DOF | Degree of Freedom |
| FEM | Finite Element Method |
| FRF | Frequency Response Function |
| FSI | Fluid–Structure Interaction |
| LF | Low Frequency |
| MF | Medium Frequency |
| ROM | Reduced-Order Model |
| SROM | Stochastic Reduced-Order Model |
| UQ | Uncertainty Quantification |
| elastic coefficients of the structure | |
| damping coefficients of the structure | |
| speed of sound in the internal acoustic fluid | |
| speed of sound in the external acoustic fluid | |
| vector of the generalized forces for the internal acoustic fluid | |
| vector of the generalized forces for the structure | |
| mechanical body force field in the structure | |
| i | imaginary complex number i |
| k | wave number in the external acoustic fluid |
| n | number of internal acoustic DOF |
| number of structural DOF | |
| component of vector | |
| outward unit normal to | |
| component of vector | |
| outward unit normal to | |
| p | internal acoustic pressure field |
| external acoustic pressure field | |
| value of the external acoustic pressure field on | |
| given external acoustic pressure field | |
| value of the given external acoustic pressure field on | |
| vector of the generalized coordinates for the internal acoustic fluid | |
| vector of the generalized coordinates for the structure | |
| component of the damping stress tensor in the structure | |
| t | time |
| structural displacement field | |
| internal acoustic velocity field | |
| coordinate of point | |
| generic point of | |
| reduced dynamical matrix for the internal acoustic fluid | |
| random reduced dynamical matrix for the internal acoustic fluid | |
| dynamical matrix for the internal acoustic fluid | |
| reduced matrix of the impedance boundary operator for the external acoustic fluid | |
| matrix of the impedance boundary operator for the external acoustic fluid | |
| reduced dynamical matrix for the fluid-structure coupled system | |
| random reduced dynamical matrix for the fluid-structure coupled system | |
| dynamical matrix for the fluid-structure coupled system | |
| reduced dynamical matrix for the structure | |
| random reduced dynamical matrix for the structure | |
| dynamical matrix for the structure | |
| reduced dynamical matrix associated with the wall acoustic impedance | |
| dynamical matrix associated with the wall acoustic impedance | |
| reduced coupling matrix between the internal acoustic fluid and the structure | |
| random reduced coupling matrix between the internal acoustic fluid and the structure | |
| coupling matrix between the internal acoustic fluid and the structure | |
| reduced damping matrix for the internal acoustic fluid | |
| random reduced damping matrix for the internal acoustic fluid | |
| damping matrix for the internal acoustic fluid | |
| reduced damping matrix for the structure | |
| random reduced damping matrix for the structure | |
| damping matrix for the structure | |
| DOF | degrees of freedom |
| vector of discretized acoustic forces | |
| vector of discretized structural forces | |
| initial elasticity tensor for viscoelastic material | |
| relaxation functions for viscoelastic material | |
| mechanical surface force field on | |
| random matrix | |
| random matrix | |
| reduced “stiffness” matrix for the internal acoustic fluid | |
| random reduced “stiffness” matrix for the internal acoustic fluid | |
| “stiffness” matrix for the internal acoustic fluid | |
| reduced stiffness matrix for the structure | |
| random reduced stiffness matrix for the structure | |
| stiffness matrix for the structure | |
| reduced “mass” matrix for the internal acoustic fluid | |
| random reduced “mass” matrix for the internal acoustic fluid | |
| “mass” matrix for the internal acoustic fluid | |
| reduced mass matrix for the structure | |
| random reduced mass matrix for the structure | |
| mass matrix for the structure | |
| internal acoustic mode | |
| matrix of internal acoustic modes | |
| Q | internal acoustic source density |
| external acoustic source density | |
| random vector of the generalized coordinates for the internal acoustic fluid | |
| random vector of the generalized coordinates for the structure | |
| random vector of internal acoustic pressure DOF | |
| vector of internal acoustic pressure DOF | |
| random vector of structural displacement DOF | |
| vector of structural displacement DOF | |
| elastic structural mode | |
| matrix of elastic structural modes | |
| Z | wall acoustic impedance |
| impedance boundary operator for external acoustic fluid | |
| dispersion parameter | |
| component of the strain tensor in the structure | |
| circular frequency in rad/s | |
| mass density of the internal acoustic fluid | |
| mass density of the external acoustic fluid | |
| mass density of the structure | |
| stress tensor in the structure | |
| component of the stress tensor in the structure | |
| component of the elastic stress tensor in the structure | |
| damping coefficient for the internal acoustic fluid | |
| boundary of | |
| boundary of equal to | |
| boundary of | |
| coupling interface between the structure and the internal acoustic fluid | |
| coupling interface between the structure and the external acoustic fluid | |
| coupling interface between the structure and the internal acoustic fluid with acoustic properties | |
| internal acoustic fluid domain | |
| external acoustic domain | |
| structural domain |
Appendix A. Frequency-Dependent Constitutive Equation for the Dissipative Structure
In this Appendix, we present an appropriate modeling of the frequency-dependent constitutive equation for a dissipative structure in distinguishing the LF range and the MF range [70]. Two cases of frequency-dependent linear constitutive equations are considered in order to describe all the various types of mechanical behaviors encountered in a complex structure. The first one is relevant to the framework of the general linear viscoelasticity theory for describing the constitutive equation of viscoelastic materials, and therefore the frequency-dependent coefficients are constructed in this framework that ensures the causality physical property. This constitutive equation will be referred to as the linear viscoelastic constitutive equation. The second one allows different types of mechanical damping to be modeled using the same type of constitutive equation. The frequency-dependent coefficients will not be constructed in the framework of the linear viscoelasticity theory, but will be constructed in such a way that causality physical property will still be satisfied. This constitutive equation will be referred to as the linear dissipative constitutive equation for modeling damping effects.
Appendix A.1. Linear Viscoelastic Constitutive Equation in the Frequency Domain
The general theory of linear viscoelasticity is used (see [112,113,114]). With respect to the presentation detailed in [41], we present here a summary of those results with additional developments. In this section, is fixed in and will be omitted in all the quantities. The Latin indices, such as i, j, k, and h, take the values 1, 2, and 3. The convention for summations over repeated Latin indices is used. The general constitutive equation in the frequency range is written as
It can be proven that
in which is called the initial elasticity tensor. It can be deduced that
Equation (A4) shows that viscoelastic materials behave elastically at high frequencies with elasticity coefficients defined by the initial elasticity tensor that differs from the equilibrium modulus tensor that is such that
in which and . The reader should be aware of the fact that the constitutive equation of an elastic material in a static deformation process is defined by equilibrium modulus tensor , and not by the initial elasticity tensor . Referring to [112,115], it has been proven that is a negative-definite tensor. The tensors and are even functions:
Due to the symmetry properties of tensors , it can directly be deduced that tensors and must satisfy the symmetry properties
In addition, the following positive-definiteness properties can be shown. For all second-order real symmetric tensors ,
in which the positive constants and are such that and , where is a positive real constant independent of .
Appendix A.2. Compatibility Equation between a ijkh and b ijkh
We recall that is the equilibrium modulus tensor that is the elastic tensor and which is denoted by ,
Due to the causality property in the time domain and using the Hilbert transform for causal function [102,116,117,118,119]), it can be proven that there is a compatibility equation between and , also called the Kramers and Kronig relation (see [120,121]), which is written
in which p.v denotes the Cauchy principal value. If is a locally integrable function on the real line except in a singular point , then the p.v is defined as
Appendix A.3. Construction of the Linear Viscoelastic Constitutive Equation in the Frequency Domain
Two cases are considered.
- (i) Particular case. A family of linear viscoelastic constitutive equations can be constructed in the time domain using linear differential equations in and . The associated frequency-dependent coefficients and automatically verified Equation (A12). In this framework, some examples for and can be found in the literature (e.g., [41,98,112,113,122,123,124,125,126,127]).
- (ii) General case. In the general case for which and are not derived from such an algebraic representation but correspond to a general integral operator in the time domain (e.g., constructed using experimental curves), a rigorous method of construction is proposed below to satisfy the causality principle.
For the general case, it is assumed that a part of the structure is made of material modeled in the framework of the linear viscoelasticity theory (see after), while the complementary part will be modeled with a linear dissipative constitutive equation for modeling damping effects (detailed in Section A.4). We then have .
For the practical construction of the constitutive equation related to , it is assumed that functions for and equilibrium modulus tensor (which is the symmetric and positive-definite elastic tensor) are given. For real and for belonging to , functions can then be constructed.
- The given functions cannot be arbitrarily chosen, but must satisfy some hypotheses to ensure the coherence of the viscoelastic model:(1) For all fixed and , the tensor must be symmetric and positive definite.(2) For , Equation (A3) must hold, which means that functions decrease at infinity at least in with .(3) Functions that satisfy (1) and (2) are then extended to using the even property defined by Equation (A6).
- For all fixed and , the tensor must be symmetric and positive definite. For all , functions are then constructed using the following equation (see Equation (A12)),and are extended to using the even property.
- As seen above, for all fixed and , symmetric tensor must be positive definite. This property must then be checked at the end of the construction, and if it is not satisfied, functions must be modified. In [101], it has been shown that the following sufficient condition allows this property to be satisfied: if functions are decreasing functions for , then the property is verified.
Appendix A.4. Linear Dissipative Constitutive Equation for Modeling Damping Effects
This section deals with the linear dissipative constitutive equation for modeling damping effects in the part of the structure . Several models of dissipative constitutive equation (with frequency-dependent coefficients) corresponding to an elastic material are considered for which the mechanical damping is arbitrarily introduced in order to represent damping effects. The first model presented is the constitutive equation for an elastic material with a linear viscous damping term. The second one is a constitutive equation for an elastic material with a parameterized family of damping models depending on frequency. The construction proposed for these two models is such that the causality principle will be verified, and consequently, the fourth-order tensor will depend on although the elastic tensor of the elastic material is independent of .
(i) Constitutive equation for an elastic material with a linear viscous damping term. In this case, the constitutive equation is given by Equation (A1), in which
in which the tensors and are symmetric positive definite and independent of .
(ii) Constitutive equation for an elastic material with a parameterized family of damping models depending on frequency. The constitutive equation is then defined as an elastic material with a parameterized family of damping models depending on frequency and is written as
in which the tensor is symmetric positive definite and where is a positive-valued real function in which must satisfy the following properties:
- (1)
- For , function must decrease at infinity at least in in which .
- (2)
- Function is even, .
From Equation (A14), it can be deduced that for all fixed and for all , the symmetric positive definite tensor must be constructed by the following equation:
in order to ensure the causality property for the constitutive equation. For , the values of are obtained using the even property in of functions . Finally, function must be such that for all fixed and , symmetric tensor is positive definite. As previously explained, this property will be satisfied if function is a decreasing function for .
Appendix B. Boundary Element Method for the External Acoustic Fluid
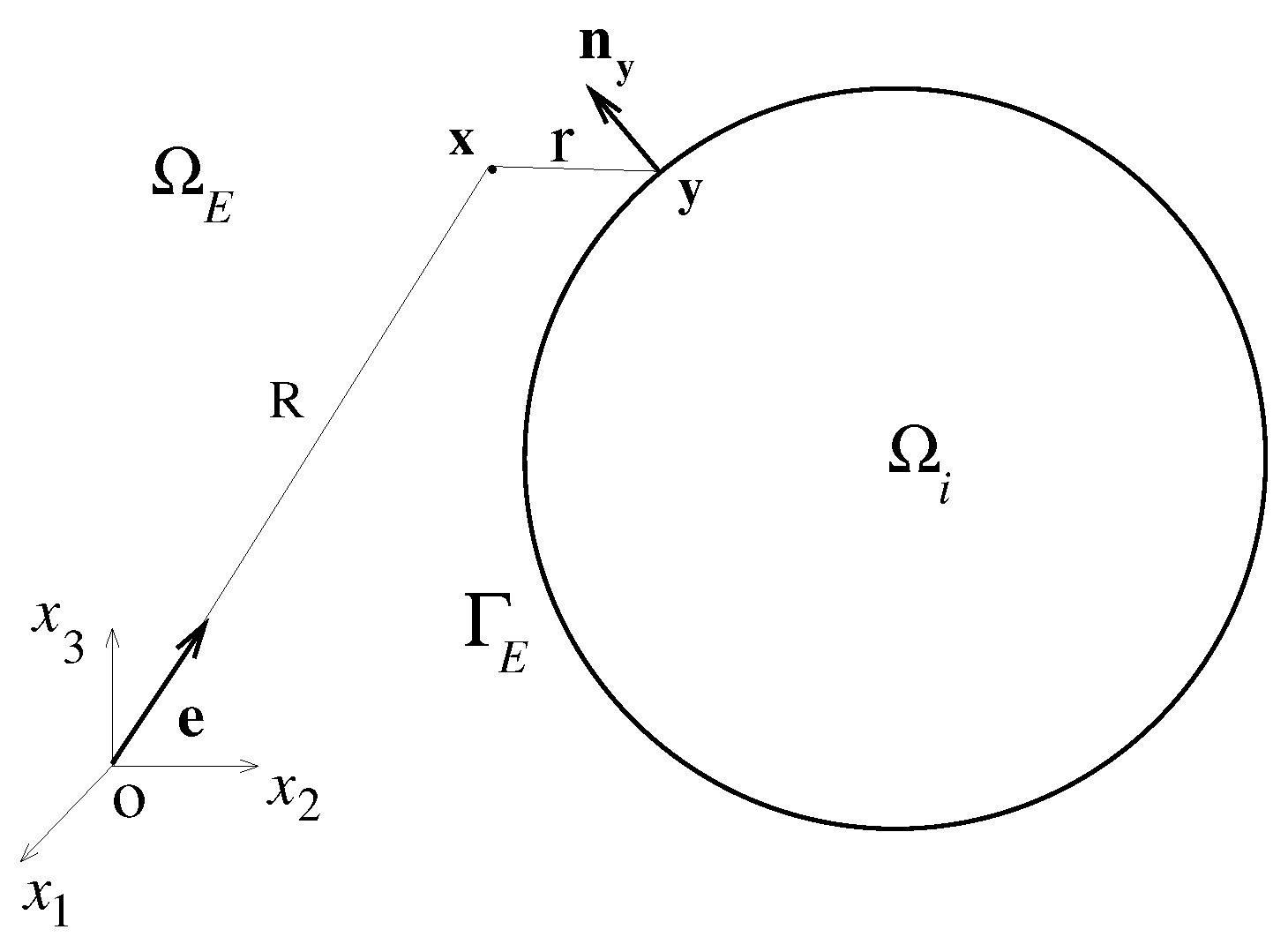
The general references related to the boundary element methods and to their discretization can be found in [27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,98]. The inviscid acoustic fluid occupies the infinite three-dimensional domain whose boundary is (see Figure A1).
Figure A1.
Geometry of the external infinite domain.
This section is devoted to the construction of the frequency-dependent impedance boundary operator such that , which relates the pressure field exerted by the external fluid on to the normal velocity field induced by the deformation of the boundary . Furthermore, most of those formulations yield non-symmetric fully populated complex matrices. The computational cost can then be reduced using the fast multipole methods [35,40,44,45,46]. A major drawback of the classical boundary integral formulations for the exterior Neumann problem related to the Helmholtz equation is related to the uniqueness problem, although the boundary value problem has a unique solution for all real frequencies [97,98]. Precisely, there is not a unique solution of the physical problem for a sequence of real frequencies called spurious or irregular frequencies, also called Jones eigenfrequencies [31,128,129,130,131], and various methods are proposed in the literature to overcome this mathematical difficulty arising in the boundary element method [128,132,133,134,135,136]. In this appendix, we present a boundary element method that was initially developed in [137] and detailed in [41]. The formulation of this method is symmetric, and is valid for all real values of the frequency (i.e., without spurious frequencies).
Appendix B.1. Exterior Neumann Boundary Value Problem Related to the Helmholtz Equation
The geometry is defined in Figure A1. The equations of the exterior Neumann problem related to the Helmholtz equation (see Equations (1)–(3)) are rewritten in terms of a velocity potential . Let be the velocity field of the fluid. The acoustic pressure is related to by the following equation:
where is the constant mass density of the external fluid at equilibrium. Let be the constant speed of sound in the external fluid at equilibrium, and let be the wave number at frequency . The exterior Neumann problem is written as
with , where is the derivative in the radial direction and where is the given normal velocity field on . Equation (A19) is the Helmholtz equation in the external acoustic fluid, Equation (A20) is the Neumann condition on external fluid–structure interface , and Equation (A21) corresponds to the outward Sommerfeld radiation condition at infinity. For arbitrary real , the boundary value problem defined by Equations (A19)–(A21) admits a unique solution denoted that depends linearly on the normal velocity v [97,98].
Appendix B.2. Introduction of the Acoustic Impedance Boundary Operator and Radiation Impedance Operator
Let be the value of on . For all in , let be the complex linear operator such that
and let be the complex linear boundary operator such that
Using Equation (A18), for all in , the pressure field is written as
in which is called the radiation impedance operator that can then be written as
Similarly, the pressure field on is written as
in which is called the acoustic impedance boundary operator, which can then be written as
Appendix B.3. Algebraic Properties of the Acoustic Impedance Boundary Operator
Let be the transpose of complex operator . We have the following symmetry property:
and from Equation (A27), it can be deduced that
It should be noted that these complex operators are symmetric but not Hermitian. Operator can be written as
in which and are two real linear operators such that
The real part of the acoustic impedance boundary operator is symmetric and positive, due to the Sommerfeld radiation condition at infinity.
Appendix B.4. Construction of the Acoustic Impedance Boundary Operator for All Real Values of the Frequency
This construction is based on the use of two boundary integral equations on . The first one is based on the use of a single- and double-layer potentials on . The second is obtained by the taking the normal derivative on of the first one. We then obtained the following system relating to v, which then allows to be defined using Equation (A23),
The linear boundary integral operators , , and are defined by
where is the Green function, which is written as
in which . In Equations (A34)–(A36), the brackets correspond to bilinear forms which allow the operators to be defined, and the functions and are associated with functions v and . Considering Equation (A33), let be the operator defined by
Operator has the symmetric property, . In Equation (A33), the first equation can be rewritten as . This classical boundary equation that allows the velocity potential to be calculated for a given normal velocity has a unique solution for all real , which does not belong to the set of frequencies for which has a null space that is not reduced to . This set of frequencies is called the set of spurious frequencies. Consequently, for a frequency that is a spurious frequency, is the sum of solution with an arbitrary element of the null space of . The method then consists of using the second equation that is written as , and which yields solution for all real . Concerning the practical construction of , for all real values of , using Equation (A33), a particular elimination procedure is described in Section B.6.
Appendix B.5. Construction of the Radiation Impedance Operator
The solution of Equations (A19)–(A21) can be calculated using the following integral equation:
For all fixed in , the linear integral operators and are defined by
Using Equation (A23), Equation (A39) can be rewritten as
From Equation (A22), it can be deduced that, for all in ,
and the radiation impedance operator is derived from Equations (A25) and (A43),
Appendix B.6. Symmetric Boundary Element Method without Spurious Frequencies
The finite element method is used for discretizing the boundary integral operators , , and (called a boundary element method). Let us consider a finite element mesh of boundary . Let and be the complex vectors of the degrees-of-freedom consisting of the values of v and at the nodes of the mesh. Let , , and be the full complex matrices corresponding to the discretization of the operators defined in Equations (A34)–(A36). The complex matrices and are symmetric. The finite element discretization of Equation (A33) yields
in which the symmetric complex matrix is written as
In Equation (A45), is the complex vector of the nodal unknowns corresponding to the finite element discretization of . The matrix is the non-diagonal real matrix corresponding to the discretization of identity operator . The elimination of in Equation (A45) yields a linear equation between and , which defines the symmetric complex matrix , which corresponds to the finite element discretization of boundary integral operator ,
Vector is eliminated using a Gauss elimination with a partial row pivoting algorithm [138]. If does not belong to the set of the spurious frequencies, then is invertible and the elimination in Equation (A45) is performed up to row number . If coincides with a spurious frequency (i.e., ), then is not invertible, and its null space is a real subspace of of dimension . In this case, the elimination in Equation (A45) is performed up to row number . In practice, is unknown. During the Gauss elimination with a partial row pivoting algorithm, the elimination process is stopped when a “zero” pivot is encountered. It should be noted that when the elimination is stopped, the equations corresponding to row numbers are automatically satisfied. From Equation (A27), we deduce that the complex symmetric matrix of operator is such that
The finite element discretization of the acoustic radiation impedance operator , defined by Equation (A45), is written as
Appendix B.7. Acoustic Response to Prescribed Wall Displacement Field and Acoustic Source Density
We consider the acoustic response of the infinite external acoustic fluid submitted to an external acoustic excitation induced by an acoustic source and to a normal velocity field on , which is written as (see Section 2 and Figure 1).
(i) Pressure in . For all in , the total pressure is written as
The field that is radiated by the boundary submitted to the given velocity field v is written (see Equation (A24)) as
The given pressure is such that
in which is the pressure in the free space induced by the acoustic source , which is written as
where G is defined by Equation (A37), and where is deduced from Equations (A18) and (A53). In the right-hand side of Equation (A52), the second term corresponds to the scattering of the incident wave induced by the external acoustic source by the boundary that is considered as rigid and fixed.
(ii) Pressure on . From Equation (A50), it can be deduced that the total pressure on is written as
in which is such that
and where the pressure field on is written
Equation (A54) can then be rewritten as
Appendix B.8. Asymptotic Formula for the Radiated Pressure Far Field
At point in the external domain , the radiated pressure is given (see Equation (A24)) by . For an observation point that is far from the structure, the Green function is rapidly oscillating that induces numerical difficulties for performing the integration over . To circumvent this difficulty, asymptotic formulas can be used. Introducing the following parameterization of vector ,
the asymptotic formulas are written as
in which the operators and are defined by
with
From Equation (A43), the asymptotic formula for the radiation impedance operator is then written as
References
- Morse, P.M.; Ingard, K.U. Theoretical Acoustics; McGraw-Hill: New York, NY, USA, 1968. [Google Scholar]
- Lighthill, J. Waves in Fluids; Cambridge University Press: Boston, MA, USA, 1978. [Google Scholar]
- Cremer, L.; Heckl, M.; Ungar, E.E. Structure-Born Sound; Springer: Berlin, Germany, 1988. [Google Scholar]
- Pierce, A.D. Acoustics: An Introduction to Its Physical Principles and Applications; Originally Published in 1981, McGraw-Hill, New York, NY, USA; Acoustical Society of America Publications on Acoustics: Woodbury, NY, USA, 1989. [Google Scholar]
- Crighton, D.G.; Dowling, A.P.; Ffowcs-Williams, J.E.; Heckl, M.; Leppington, F.G. Modern Methods in Analytical Acoustics; Springer: Berlin, Germany, 1992. [Google Scholar]
- Landau, L.; Lifchitz, E. Fluid Mechanics; Pergamon Press: Oxford, UK, 1992. [Google Scholar]
- Junger, M.C.; Feit, D. Sound, Structures and Their Interaction; Originally Published in 1972, MIT Press, Cambridge, UK; Acoustical Society of America Publications on Acoustics: Woodbury, NY, USA, 1993. [Google Scholar]
- Blackstock, D.T. Fundamentals in Physical Acoustics; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Bruneau, M. Fundamentals of Acoustics; ISTE USA: Newport Beach, CA, USA, 2006. [Google Scholar]
- Fahy, F.J.; Gardonio, P. Sound and Structural Vibration, Second Edition: Radiation, Transmission and Response; Academic Press: Oxford, UK, 2007. [Google Scholar]
- Howe, M.S. Acoustics of Fluid-Structure Interactions; Cambridge Monographs on Mechanics, Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Bathe, K.J.; Wilson, E.L. Numerical Methods in Finite Element Analysis; Prentice-Hall: New York, NY, USA, 1976. [Google Scholar]
- Hughes, T.J.R. The Finite Element Method: Linear Static and Dynamic Finite Element Analysis; Dover Publications: New York, NY, USA, 2000. [Google Scholar]
- Fish, J.; Belytshko, T. A First Course in Finite Elements; John Wiley and Sons: Chichester, UK, 2007. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L.; Fox, D.D. The Finite Element Method For Solid and Structural Mechanics, 7th ed.; Elsevier, Butterworth-Heinemann: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Hughes, T.J.R.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Geers, T.L.; Felippa, C.A. Doubly asymptotic approximations for vibration analysis of submerged structures. J. Acoust. Soc. Am. 1983, 173, 1152–1159. [Google Scholar] [CrossRef]
- Harari, I.; Hughes, T.J.R. Finite element methods for the Helmholtz equation in an exterior domain: Model problems. Comput. Methods Appl. Mech. Eng. 1991, 87, 59–96. [Google Scholar] [CrossRef]
- Givoli, D. Numerical Methods for Problems in Infinite Domains; Elsevier: Amsterdam, The Netherlands; London, UK; New York, NY, USA; Tokyo, Japan, 1992. [Google Scholar]
- Harari, I.; Grosh, K.; Hughes, T.J.R.; Malhotra, M.; Pinsky, P.M.; Stewart, J.R.; Thompson, L.L. Recent development in finite element methods for structural acoustics. Arch. Comput. Methods Eng. 1996, 3, 131–309. [Google Scholar] [CrossRef]
- Astley, R.J. Infinite elements for wave problems: A review of current formulations and assessment of accuracy. Int. J. Numer. Methods Eng. 2000, 49, 951–976. [Google Scholar] [CrossRef]
- Farhat, C.; Tezaur, R.; Toivanen, J. A domain decomposition method for discontinuous Galerkin discretizations of Helmholtz problems with plane waves and Lagrange multipliers. Int. J. Numer. Methods Eng. 2009, 78, 1513–1531. [Google Scholar] [CrossRef]
- Oden, J.T.; Prudhomme, S.; Demkowicz, L. A posteriori error estimation for acoustic wave propagation. Arch. Comput. Methods Eng. 2005, 12, 343–389. [Google Scholar] [CrossRef]
- Bergen, B.; van Genechten, B.; Vandepitte, D.; Desmet, W. An efficient Trefftz-based method for three-dimensional Helmholtz in unbounded domain. Comput. Model. Eng. Sci. 2010, 61, 155–175. [Google Scholar]
- Ihlenburg, F. Finite Element Analysis of Acoustic Scattering; Springer: New York, NY, USA, 2013. [Google Scholar]
- Farhat, C.; Harari, I.; Hetmaniuk, U. The discontinuous enrichment method for medium-frequency Helmholtz problems with a spatially variable wavenumber. Comput. Methods Appl. Mech. Eng. 2014, 268, 126–140. [Google Scholar]
- Costabel, M.; Stephan, E. A direct boundary integral equation method for transmission problems. J. Math. Anal. Appl. 1985, 106, 367–413. [Google Scholar] [CrossRef]
- Kress, R. Linear Integral Equations; Springer: New York, NY, USA, 1989. [Google Scholar]
- Brebbia, C.A.; Dominguez, J. Boundary Elements: An Introductory Course; McGraw-Hill: New York, NY, USA, 1992. [Google Scholar]
- Chen, G.; Zhou, J. Boundary Element Methods; Academic Press: New York, NY, USA, 1992. [Google Scholar]
- Colton, D.L.; Kress, R. Integral Equation Methods in Scattering Theory; Krieger Publishing Company: Malabar, FL, USA, 1992. [Google Scholar]
- Hackbusch, W. Integral Equations, Theory and Numerical Treatment; Birkhauser Verlag: Basel, Switzerland, 1995. [Google Scholar]
- Bonnet, M. Boundary Integral Equation Methods for Solids and Fluids; John Wiley: New York, NY, USA, 1999. [Google Scholar]
- Gaul, L.; Kögl, M.; Wagner, M. Boundary Element Methods for Engineers and Scientists; Springer: Heidelberg, Germany; New York, NY, USA, 2003. [Google Scholar]
- Schanz, M.; Steinbach, O.E. Boundary Element Analysis; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2007. [Google Scholar]
- Hsiao, G.C.; Wendland, W.L. Boundary Integral Equations; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Sauter, S.A.; Schwab, C. Boundary Elements Methods; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Jones, D.S. Integral equations for the exterior acoustic problem. Q. J. Mech. Appl. Math. 1974, 1, 129–142. [Google Scholar] [CrossRef]
- Jones, D.S. Acoustic and Electromagnetic Waves; Oxford University Press: New York, NY, USA, 1986. [Google Scholar]
- Greengard, L.; Rokhlin, V. A fast algoritm for particle simulations. J. Comput. Phys. 1987, 73, 325–348. [Google Scholar] [CrossRef]
- Ohayon, R.; Soize, C. Structural Acoustics and Vibration; Academic Press: London, UK, 1998. [Google Scholar]
- Von Estorff, O.; Coyette, J.P.; Migeot, J.L. Governing formulations of the BEM in acoustics. In Boundary Elements in Acoustics—Advances and Applications; Von Estorff, O., Ed.; WIT Press: Southampton, UK, 2000; pp. 1–44. [Google Scholar]
- Nedelec, J.C. Acoustic and Electromagnetic Equations. Integral Representation for Harmonic Problems; Springer: New York, NY, USA, 2001. [Google Scholar]
- Gumerov, N.A.; Duraiswami, R. Fast Multipole Methods for the Helmholtz Equation in Three Dimension; Elsevier Ltd.: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Bonnet, M.; Chaillat, S.; Semblat, J.F. Multi-level fast multipole BEM for 3-D elastodynamics. In Recent Advances in Boundary Element Methods; Manomis, G.D., Polyzos, D., Eds.; Springer: Berlin, Germany, 2009; pp. 15–27. [Google Scholar]
- Brunner, D.; Junge, M.; Gaul, L. A comparison of FE-BE coupling schemes for large scale problems with fluid-structure interaction. Int. J. Numer. Methods Eng. 2009, 77, 664–688. [Google Scholar] [CrossRef]
- Lee, M.; Park, Y.S.; Park, Y.; Park, K.C. New approximations of external acoustic-structural interactions: Derivation and evaluation. Comput. Methods Appl. Mech. Eng. 2009, 198, 1368–1388. [Google Scholar] [CrossRef]
- Chen, L.; Chen, H.; Zheng, C.; Marburg, S. Structural-acoustic sensitivity analysis of radiated sound power using a finite element/discontinuous fast multipole boundary element scheme. Int. J. Numer. Methods Fluids 2016, 82, 858–878. [Google Scholar] [CrossRef]
- Ryckelynck, D. A priori hyperreduction method: An adaptive approach. J. Comput. Phys. 2005, 202, 346–366. [Google Scholar] [CrossRef]
- Grepl, M.A.; Maday, Y.; Nguyen, N.C.; Patera, A. Efficient reduced-basis treatment of nonaffine and nonlinear partial differential equations. ESAIM Math. Model. Numer. Anal. 2007, 41, 575–605. [Google Scholar] [CrossRef]
- Nguyen, N.; Peraire, J. An efficient reduced-order modeling approach for non-linear parametrized partial differential equations. Int. J. Numer. Methods Eng. 2008, 76, 27–55. [Google Scholar] [CrossRef]
- Chaturantabut, S.; Sorensen, D.C. Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Stat. Comput. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Degroote, J.; Virendeels, J.; Willcox, K. Interpolation among reduced-order matrices to obtain parameterized models for design, optimization and probabilistic analysis. Int. J. Numer. Methods Fluids 2010, 63, 207–230. [Google Scholar] [CrossRef]
- Carlberg, K.; Bou-Mosleh, C.; Farhat, C. Efficient non-linear model reduction via a least-squares Petrov-Galerkin projection and compressive tensor approximations. Int. J. Numer. Methods Eng. 2011, 86, 155–181. [Google Scholar] [CrossRef]
- Carlberg, K.; Farhat, C. A low-cost, goal-oriented compact proper orthogonal decomposition basis for model reduction of static systems. Int. J. Numer. Methods Eng. 2011, 86, 381–402. [Google Scholar] [CrossRef]
- Amsallem, D.; Zahr, M.J.; Farhat, C. Nonlinear model order reduction based on local reduced-order bases. Int. J. Numer. Methods Eng. 2012, 92, 891–916. [Google Scholar] [CrossRef]
- Carlberg, K.; Farhat, C.; Cortial, J.; Amsallem, D. The GNAT method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. J. Comput. Phys. 2013, 242, 623–647. [Google Scholar] [CrossRef]
- Zahr, M.; Farhat, C. Progressive construction of a parametric reduced-order model for PDE-constrained optimization. Int. J. Numer. Methods Eng. 2015, 102, 1077–1110. [Google Scholar] [CrossRef]
- Farhat, C.; Avery, P.; Chapman, T.; Cortial, J. Dimensional reduction of nonlinear finite element dynamic models with finite rotations and energy-based mesh sampling and weighting for computational efficiency. Int. J. Numer. Methods Eng. 2014, 98, 625–662. [Google Scholar] [CrossRef]
- Amsallem, D.; Zahr, M.J.; Choi, Y.; Farhat, C. Design optimization using hyper-reduced-order models. Struct. Multidiscip. Optim. 2015, 51, 919–940. [Google Scholar] [CrossRef]
- Farhat, C.; Chapman, T.; Avery, P. Structure-preserving, stability, and accuracy properties of the Energy-Conserving Sampling and Weighting (ECSW) method for the hyper reduction of nonlinear finite element dynamic models. Int. J. Numer. Methods Eng. 2015, 102, 1077–1110. [Google Scholar] [CrossRef]
- Paul-Dubois-Taine, A.; Amsallem, D. An adaptive and efficient greedy procedure for the optimal training of parametric reduced-order models. Int. J. Numer. Methods Eng. 2015, 102, 1262–1292. [Google Scholar] [CrossRef]
- Clough, R.W. Dynamics of Structures; McGraw-Hill: New York, NY, USA, 1975. [Google Scholar]
- Meirovitch, L. Computational Methods in Structural Dynamics; Sijthoff and Noordhoff: Alphen aan den Rijn, The Netherlands, 1980. [Google Scholar]
- Argyris, J.; Mlejnek, H.P. Dynamics of Structures; Elsevier: Amsterdam, The Netherlands, 1991. [Google Scholar]
- Morand, H.P.; Ohayon, R. Fluid Structure Interaction; Wiley: Chichester, UK, 1995. [Google Scholar]
- Craig, R.R., Jr.; Kurdila, A.J. Fundamentals of Structural Dynamics; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- De Klerk, D.; Rixen, D.J.; Voormeeren, S.N. General framework for dynamic substructuring: History, review and classification of techniques. AIAA J. 2008, 46, 1169–1181. [Google Scholar] [CrossRef]
- Preumont, A. Twelve Lectures on Structural Dynamics; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Ohayon, R.; Soize, C. Advanced Computational Vibroacoustics—Reduced-Order Models and Uncertainty Quantification; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Ohayon, R.; Soize, C. Variational-based reduced-order model in dynamic substructuring of coupled structures through a dissipative physical interface: Recent advances. Arch. Comput. Methods Eng. 2014, 21, 321–329. [Google Scholar] [CrossRef]
- Peters, H.; Kessissoglou, N.; Marburg, S. Modal decomposition of exterior acoustic-structure interaction problems with model order reduction. J. Acoust. Soc. Am. 2014, 135, 2706–2717. [Google Scholar] [CrossRef] [PubMed]
- Geradin, M.; Rixen, D. Mechanical Vibrations, Third Edition: Theory and Application to Structural Dynamics; Wiley: Chichester, UK, 2015. [Google Scholar]
- Gruber, F.M.; Rixen, D.J. Evaluation of substructure reduction techniques with fixed and free interfaces. J. Mech. Eng. 2016, 62, 452–462. [Google Scholar] [CrossRef]
- Soize, C. Uncertainty Quantification. An Accelerated Course with Advanced Applications in Computational Engineering (Interdisciplinary Applied Mathematics); Springer: New York, NY, USA, 2017. [Google Scholar]
- Ghanem, R.; Spanos, P.D. Stochastic Finite Elements: A Spectral Approach; Springer: New York, NY, USA, 1991. [Google Scholar]
- Ghanem, R.; Spanos, P.D. Stochastic Finite Elements: A Spectral Approach; Revised Edition; Dover Publications: New York, NY, USA, 2003. [Google Scholar]
- Mace, B.; Worden, W.; Manson, G. Uncertainty in Structural Dynamics. J. Sound Vib. 2005, 288, 431–790. [Google Scholar] [CrossRef]
- Schueller, G.I. Uncertainties in Structural Mechanics and Analysis-Computational Methods. Comput. Struct. 2005, 83, 1031–1150. [Google Scholar]
- Schueller, G.I. On the treatment of uncertainties in structural mechanics and analysis. Comput. Struct. 2007, 85, 235–243. [Google Scholar] [CrossRef]
- Arnst, M.; Ghanem, R. Probabilistic equivalence and stochastic model reduction in multiscale analysis. Comput. Methods Appl. Mech. Eng. 2008, 197, 3584–3592. [Google Scholar] [CrossRef]
- Deodatis, G.; Spanos, P.D. Proceedings of the 5th International Conference on Computational Stochastic Mechanics. Probab. Eng. Mech. 2008, 23, 103–346. [Google Scholar] [CrossRef]
- LeMaitre, O.P.; Knio, O.M. Spectral Methods for Uncertainty Quantification with Applications to Computational Fluid Dynamics; Springer: Heidelberg, Germany, 2010. [Google Scholar]
- Soize, C. Stochastic Models of Uncertainties in Computational Mechanics; Lecture Notes in Mechanics Series; Engineering Mechanics Institute (EMI) of the American Society of Civil Engineers (ASCE): Reston, VA, USA, 2012. [Google Scholar]
- Beck, J.L.; Katafygiotis, L.S. Updating models and their uncertainties. I: Bayesian statistical framework. J. Eng. Mech. 1998, 124, 455–461. [Google Scholar] [CrossRef]
- Beck, J.L.; Au, S.K. Bayesian updating of structural models and reliability using Markov chain Monte Carlo simulation. J. Eng. Mech. ASCE 2002, 128, 380–391. [Google Scholar] [CrossRef]
- Spall, J.C. Introduction to Stochastic Search and Optimization; John Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Kaipio, J.; Somersalo, E. Statistical and Computational Inverse Problems; Springer: New York, NY, USA, 2005. [Google Scholar]
- Soize, C. A nonparametric model of random uncertainties on reduced matrix model in structural dynamics. Probab. Eng. Mech. 2000, 15, 277–294. [Google Scholar] [CrossRef]
- Soize, C. Maximum entropy approach for modeling random uncertainties in transient elastodynamics. J. Acoust. Soc. Am. 2001, 109, 1979–1996. [Google Scholar] [CrossRef] [PubMed]
- Soize, C. Random matrix theory for modeling uncertainties in computational mechanics. Comput. Methods Appl. Mech. Eng. 2005, 194, 1333–1366. [Google Scholar] [CrossRef]
- Jaynes, E.T. Information theory and statistical mechanics. Phys. Rev. 1957, 108, 171–190. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423, 623–659. [Google Scholar] [CrossRef]
- Mehta, M.L. Random Matrices; Revised and Enlarged Second Edition; Academic Press: New York, NY, USA, 1991. [Google Scholar]
- Soize, C.; Farhat, C. A nonparametric probabilistic approach for quantifying uncertainties in low- and high-dimensional nonlinear models. Int. J. Numer. Methods Eng. 2017, 109, 837–888. [Google Scholar] [CrossRef]
- Fernandez, C.; Soize, C.; Gagliardini, L. Fuzzy structure theory modeling of sound-insulation layers in complex vibroacoustic uncertain systems—Theory and experimental validation. J. Acoust. Soc. Am. 2009, 125, 138–153. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Hubert, J.; Sanchez-Palencia, E. Vibration and Coupling of Continuous Systems. Asymptotic Methods; Springer: Berlin, Germany, 1989. [Google Scholar]
- Dautray, R.; Lions, J.L. Mathematical Analysis and Numerical Methods for Science and Technology; Springer: Berlin, Germany, 1992. [Google Scholar]
- MSC Nastran, T.M. Dynamic Analysis User’s Guide, Chapter 12—Mid-Frequency Acoustics; MSC Nastran, MSC Software Cooporation: Newport Beach, CA, USA, 2017. [Google Scholar]
- Soize, C. Construction of probability distributions in high dimension using the maximum entropy principle. Applications to stochastic processes, random fields and random matrices. Int. J. Numer. Methods Eng. 2008, 76, 1583–1611. [Google Scholar]
- Soize, C.; Poloskov, I.E. Time-domain formulation in computational dynamics for linear viscoelastic media with model uncertainties and stochastic excitation. Comput. Math. Appl. 2012, 64, 3594–3612. [Google Scholar] [CrossRef]
- Papoulis, A. Signal Analysis; McGraw-Hill: New York, NY, USA, 1977. [Google Scholar]
- Capillon, R.; Desceliers, C.; Soize, C. Uncertainty quantification in computational linear structural dynamics for viscoelastic composite structures. Comput. Methods Appl. Mech. Eng. 2016, 305, 154–172. [Google Scholar] [CrossRef]
- Fishman, G. Monte Carlo: Concepts, Algorithms, and Applications; Springer: New York, NY, USA, 1996. [Google Scholar]
- Rubinstein, R.Y.; Kroese, D.P. Simulation and the Monte Carlo Method, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2008. [Google Scholar]
- Chebli, H.; Soize, C. Experimental validation of a nonparametric probabilistic model of non homogeneous uncertainties for dynamical systems. J. Acoust. Soc. Am. 2004, 115, 697–705. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Duhamel, D.; Soize, C. Probabilistic approach for model and data uncertainties and its experimental identification in structural dynamics: Case of composite sandwich panels. J. Sound Vib. 2006, 294, 64–81. [Google Scholar] [CrossRef]
- Duchereau, J.; Soize, C. Transient dynamics in structures with nonhomogeneous uncertainties induced by complex joints. Mech. Syst. Signal Process. 2006, 20, 854–867. [Google Scholar] [CrossRef]
- Soize, C.; Capiez-Lernout, E.; Durand, J.F.; Fernandez, C.; Gagliardini, L. Probabilistic model identification of uncertainties in computational models for dynamical systems and experimental validation. Comput. Methods Appl. Mech. Eng. 2008, 198, 150–163. [Google Scholar] [CrossRef]
- Durand, J.F.; Soize, C.; Gagliardini, L. Structural-acoustic modeling of automotive vehicles in presence of uncertainties and experimental identification and validation. J. Acoust. Soc. Am. 2008, 124, 1513–1525. [Google Scholar] [CrossRef] [PubMed]
- Capiez-Lernout, E.; Soize, C.; Mignolet, M.P. Post-buckling nonlinear static and dynamical analyses of uncertain cylindrical shells and experimental validation. Comput. Methods Appl. Mech. Eng. 2014, 271, 210–230. [Google Scholar] [CrossRef]
- Truesdell, C. Encyclopedia of Physics, Vol. VIa/3, Mechanics of Solids III; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1973. [Google Scholar]
- Bland, D.R. The Theory of Linear Viscoelasticity; Pergamon: London, UK, 1960. [Google Scholar]
- Fung, Y.C. Foundations of Solid Mechanics; Prentice Hall: Englewood Cliffs, NJ, USA, 1968. [Google Scholar]
- Coleman, B.D. On the thermodynamics, strain impulses and viscoelasticity. Arch. Ration. Mech. Anal. 1964, 17, 230–254. [Google Scholar] [CrossRef]
- Hahn, S.L. Hilbert Transforms in Signal Processing; Artech House Signal Processing Library: Boston, MA, USA, 1996. [Google Scholar]
- Pandey, J.N. The Hilbert Transform of Schwartz Distributions and Applications; John Wiley & Sons: New York, NY, USA, 1996. [Google Scholar]
- King, F.W. Hilbert Transforms; Vol 1 and Vol 2, Encyclopedia of Mathematics and Its Applications; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Feldman, M. Hilbert Transform Applications in Mechanical Vibration; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Kronig, R.D. On the theory of dispersion of X-rays. J. Opt. Soc. Am. 1926, 12, 547–557. [Google Scholar] [CrossRef]
- Kramers, H.A. La diffusion de la lumière par les atomes, Atti del Congresso Internazionale dei Fisica. In Proceedings of the Transactions of Volta Centenary Congress, Como, Italy, 11–20 September 1927; Volume 2, pp. 545–557. [Google Scholar]
- Bagley, R.; Torvik, P. Fractional calculus—A different approach to the analysis of viscoelastically damped struture. AIAA J. 1983, 5, 741–748. [Google Scholar] [CrossRef]
- Golla, D.F.; Hughes, P.C. Dynamics of viscoelastic structures—A time domain, finite element formulation. J. Appl. Mech. 1985, 52, 897–906. [Google Scholar] [CrossRef]
- Lesieutre, G.A.; Mingori, D. Finite element modeling of frequency-dependent material damping using augmenting thermodynamic fields. J. Guid. Control Dyn. 1990, 13, 1040–1050. [Google Scholar] [CrossRef]
- Mc Tavish, D.J.; Hughes, P.C. Modeling of linear viscoelastic space structures. J. Vib. Acoust. 1993, 115, 103–113. [Google Scholar] [CrossRef]
- Dovstam, K. Augmented Hooke’s law in frequency domain. Three dimensional material damping formulation. Int. J. Solids Struct. 1995, 32, 2835–2852. [Google Scholar] [CrossRef]
- Lesieutre, G.A. Damping in structural dynamics. In Encyclopedia of Aerospace Engineering; Blockley, R., Shyy, W., Eds.; John Wiley: New York, NY, USA, 2010. [Google Scholar]
- Burton, A.J.; Miller, G.F. The application of integral equation methods to the numerical solution of some exterior boundary value problems. Proc. R. Soc. Lond. Ser. A 1971, 323, 201–210. [Google Scholar] [CrossRef]
- Jones, D.S. Low-frequency scattering by a body in lubricated contact. Q. J. Mech. Appl. Math. 1983, 36, 111–137. [Google Scholar] [CrossRef]
- Luke, C.J.; Martin, P.A. Fluid-solid interaction: Acoustic scattering by a smooth elastic obstacle. SIAM J. Appl. Math. 1995, 55, 904–922. [Google Scholar] [CrossRef]
- Jentsch, L.; Natroshvili, D. Non-local approach in mathematical problems of fluid-structure interaction. Math. Method Appl. Sci. 1999, 22, 13–42. [Google Scholar] [CrossRef]
- Panich, O.I. On the question of solvability of the exterior boundary value problems for the wave equation and Maxwell’s equations. Russ. Math. Surv. 1965, 20, 221–226. [Google Scholar]
- Schenck, H.A. Improved integral formulation for acoustic radiation problems. J. Acoust. Soc. Am. 1968, 44, 41–58. [Google Scholar] [CrossRef]
- Mathews, I.C. Numerical techniques for three-dimensional steady-state fluid-structure interaction. J. Acoust. Soc. Am. 1986, 79, 1317–1325. [Google Scholar] [CrossRef]
- Amini, S.; Harris, P.J. A comparison between various boundary integral formulations of the exterior acoustic problem. Comput. Methods Appl. Mech. Eng. 1990, 84, 59–75. [Google Scholar] [CrossRef]
- Amini, S.; Harris, P.J.; Wilton, D.T. Coupled Boundary and Finite Element Methods for the Solution of the Dynamic Fluid-Structure Interaction Problem; Lecture Notes in Engineer; Springer: New York, NY, USA, 1992; Volume 77. [Google Scholar]
- Angelini, J.J.; Hutin, P.M. Exterior Neumann problem for Helmholtz equation. Problem of irregular frequencies. La Recherche Aérospatiale 1983, 3, 43–52. (In English) [Google Scholar]
- Golub, G.H.; van Loan, C.F. Matrix Computations; The Johns Hopkins University Press: Baltimore, MD, USA; London, UK, 1989. [Google Scholar]
Figure 1.
Geometry of the vibroacoustic system.
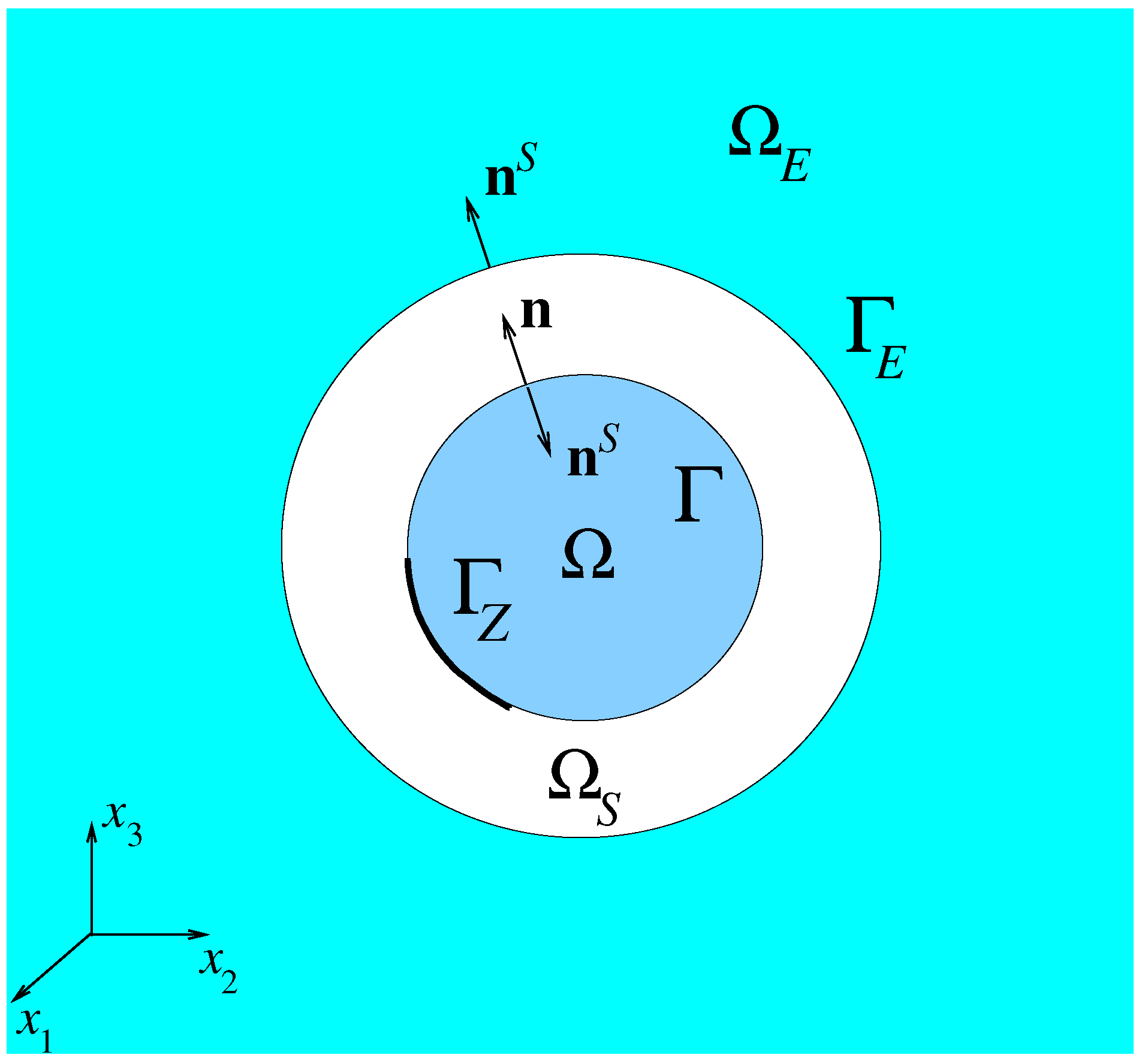
Figure 2.
Finite element model of the structure (left figure). Finite element mesh of the vibroacoustic computational model (right figure). Figure from [110].
Figure 2.
Finite element model of the structure (left figure). Finite element mesh of the vibroacoustic computational model (right figure). Figure from [110].
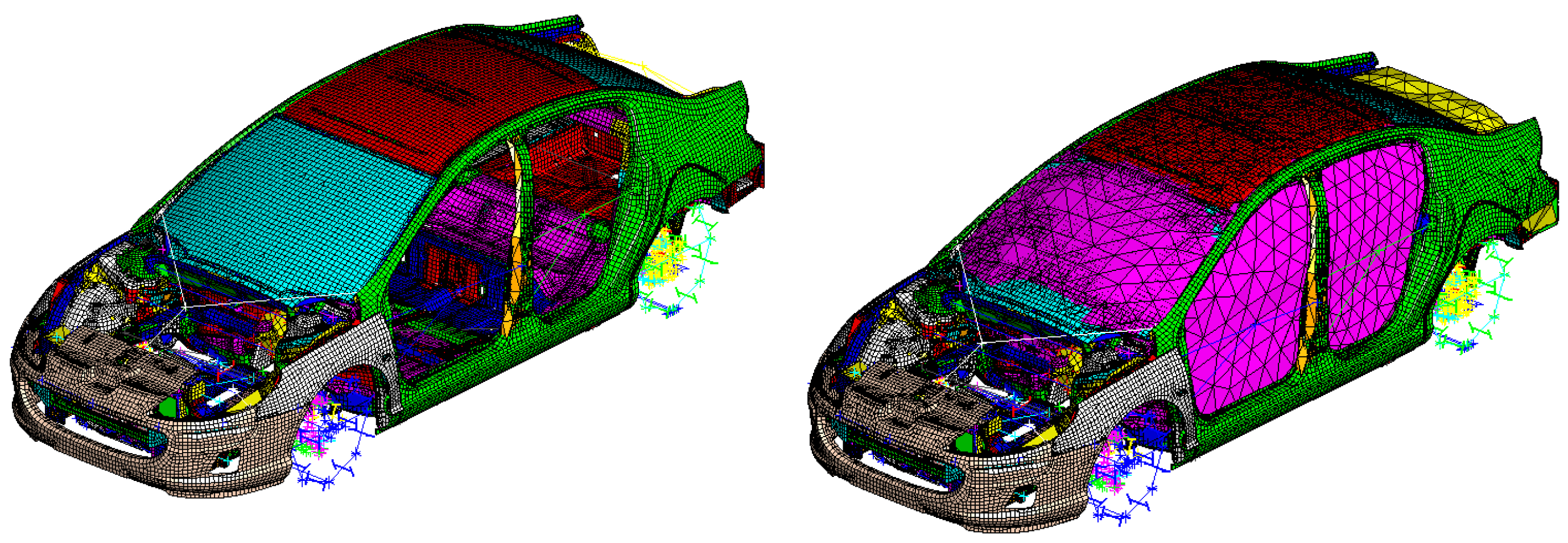
Figure 3.
The horizontal axis is the engine rotation expressed in rotations per minute corresponding to the frequency band Hz. The vertical axis is the level of the acoustic pressure in dB(A). Experimental measurements (20 blue thin lines). Prediction with the ROM (black thick line). Prediction with the identified SROM of the confidence region corresponding to the probability level (region in yellow color of in gray). Figure from [110].
Figure 3.
The horizontal axis is the engine rotation expressed in rotations per minute corresponding to the frequency band Hz. The vertical axis is the level of the acoustic pressure in dB(A). Experimental measurements (20 blue thin lines). Prediction with the ROM (black thick line). Prediction with the identified SROM of the confidence region corresponding to the probability level (region in yellow color of in gray). Figure from [110].
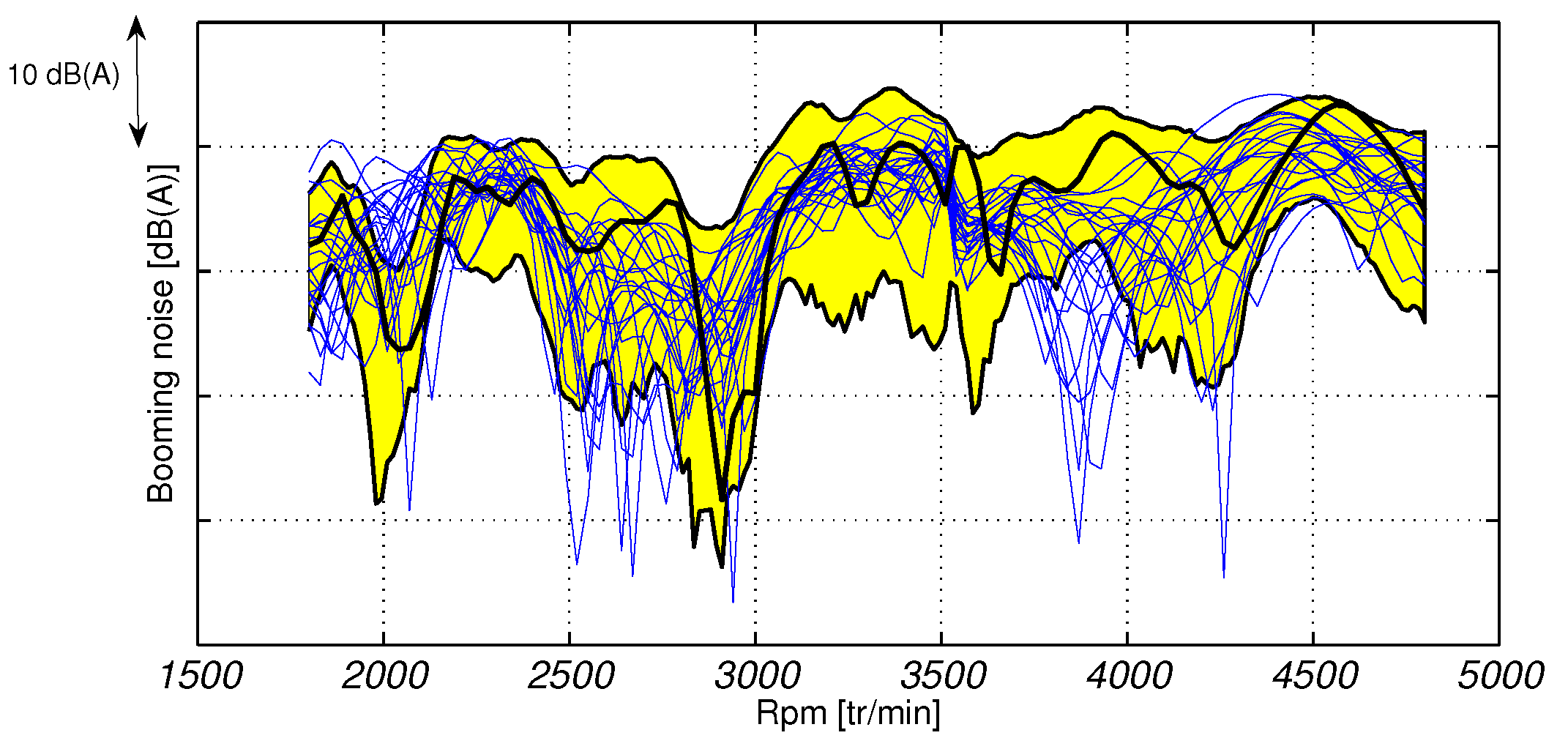
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ohayon, R.; Soize, C. Computational Vibroacoustics in Low- and Medium- Frequency Bands: Damping, ROM, and UQ Modeling. Appl. Sci. 2017, 7, 586. https://doi.org/10.3390/app7060586
AMA Style
Ohayon R, Soize C. Computational Vibroacoustics in Low- and Medium- Frequency Bands: Damping, ROM, and UQ Modeling. Applied Sciences. 2017; 7(6):586. https://doi.org/10.3390/app7060586
Chicago/Turabian StyleOhayon, Roger, and Christian Soize. 2017. "Computational Vibroacoustics in Low- and Medium- Frequency Bands: Damping, ROM, and UQ Modeling" Applied Sciences 7, no. 6: 586. https://doi.org/10.3390/app7060586
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.