Hybrid Genetic Algorithm Fuzzy-Based Control Schemes for Small Power System with High-Penetration Wind Farms

 ,
,  ,
,
Abstract
:Simple Summary
Abstract
1. Introduction
- Wind power fluctuations may cause the grid frequency to fluctuate.
- The variation in wind speed causes variations in the active power generated and thus the absorbed reactive power by the induction generator from the grid, which leads to voltage flicker at the buses of the power grid.
- Poor power quality and instability problems appear in the power system as a result of frequency fluctuation and voltage flicker, especially in the case of sensitive loads for frequency and high-voltage deviations. The effects of these problems appear clearer in isolated power systems as penetration of the wind turbine generator (WTG) increases.
- The proposed control scheme presents two fuzzy logic-based controllers to treat the drawbacks of the other linear control approaches that neglect the highly nonlinear characteristics of wind turbines.
- The intended technique uses the GA to tune the membership function parameters of FLC to achieve optimal performance and at the same time to eliminate the main disadvantage of FLC presented in the fact that deciding the input and output membership parameters of FLC is a time-consuming and complex task which often may not lead to satisfactory results.
- The proposed GA-FLC scheme discusses a complete study for the power system performance from the power and frequency stability point of views and their vital effects to improve the total behavior of system. This is distinct from the majority of the previous works which concentrate on one type of stability for the power system.
- The presented control approach is tested under severe operating conditions such as a three-phase to ground fault at the most loaded transmission line to confirm its effectiveness and robustness and check its performance during the fault period to prove its capability to keep frequency and power within its acceptable limits, so that under/over frequency or power relays do not disconnect any portion of the power system. Testing was also performed to investigate that the system can safely return to normal operation after fault clearance. Hence, using this hybrid control scheme in practical applications can ensure a continuous operation of the power system with high power quality provided even under emergency conditions.
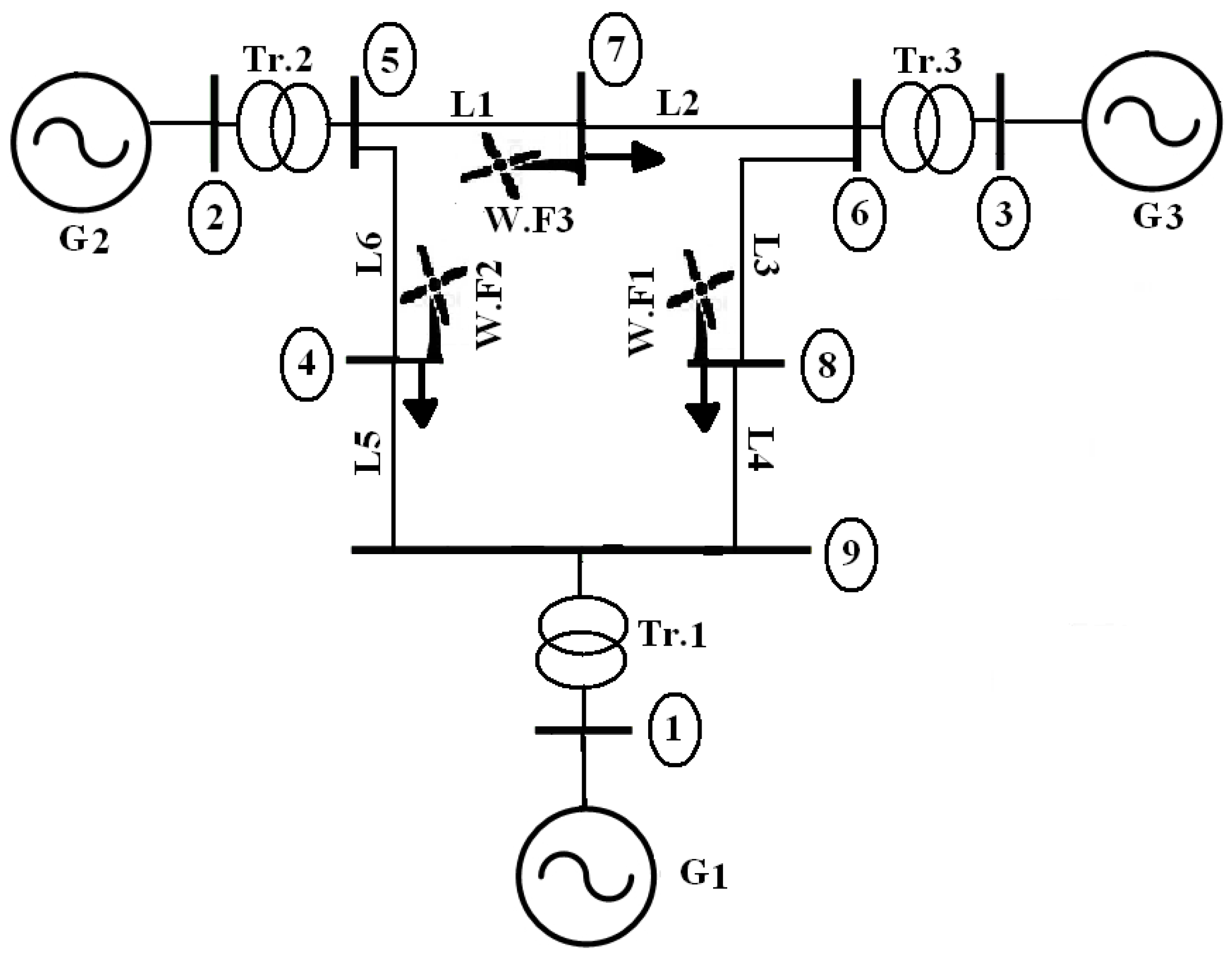
2. System Configuration
3. Controller Design Approach
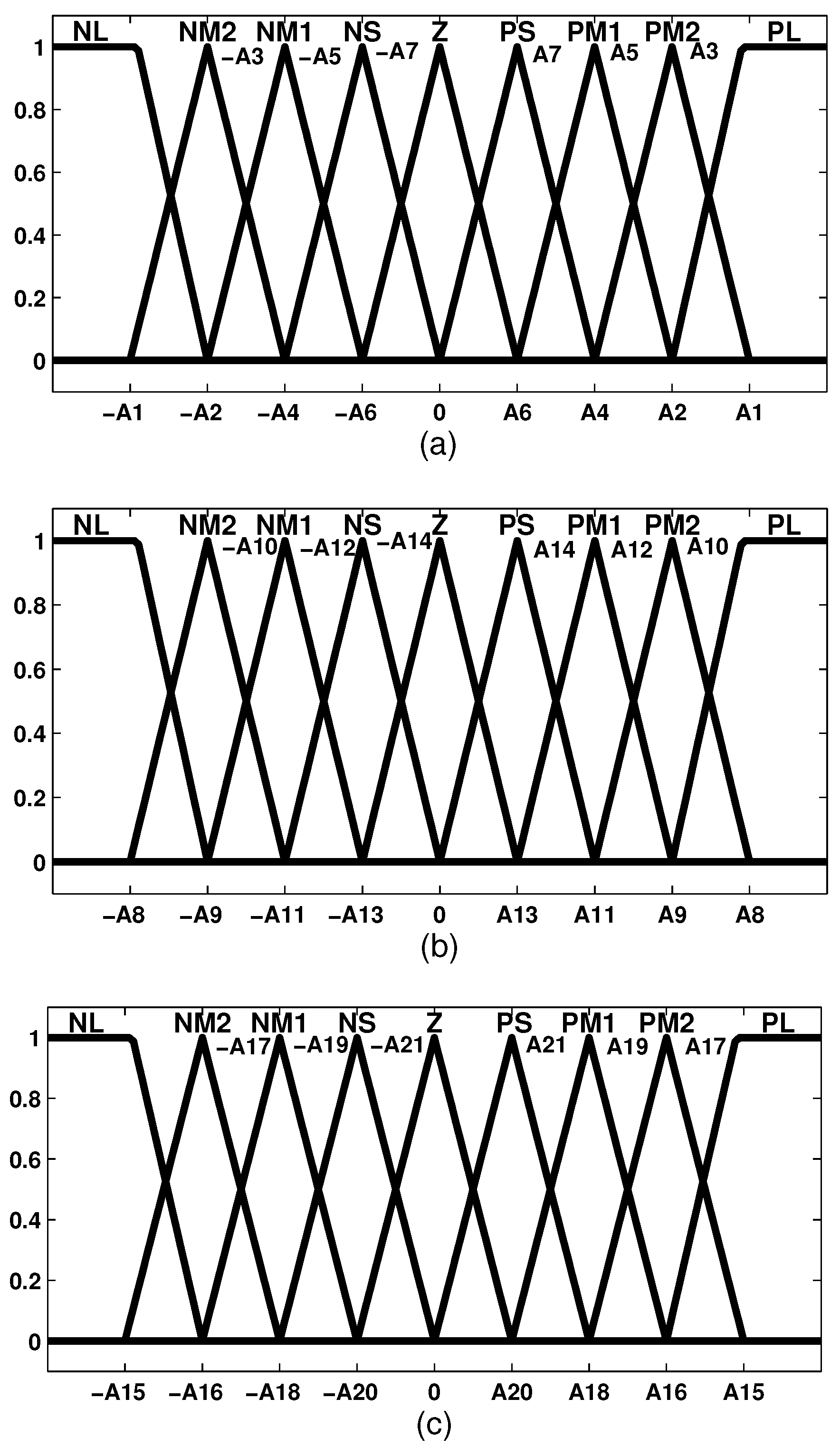
3.1. Fuzzy Logic Control
- Fuzzification is the process of transforming the crisp input signals into fuzzy set variables as FLC cannot handle these input signals.
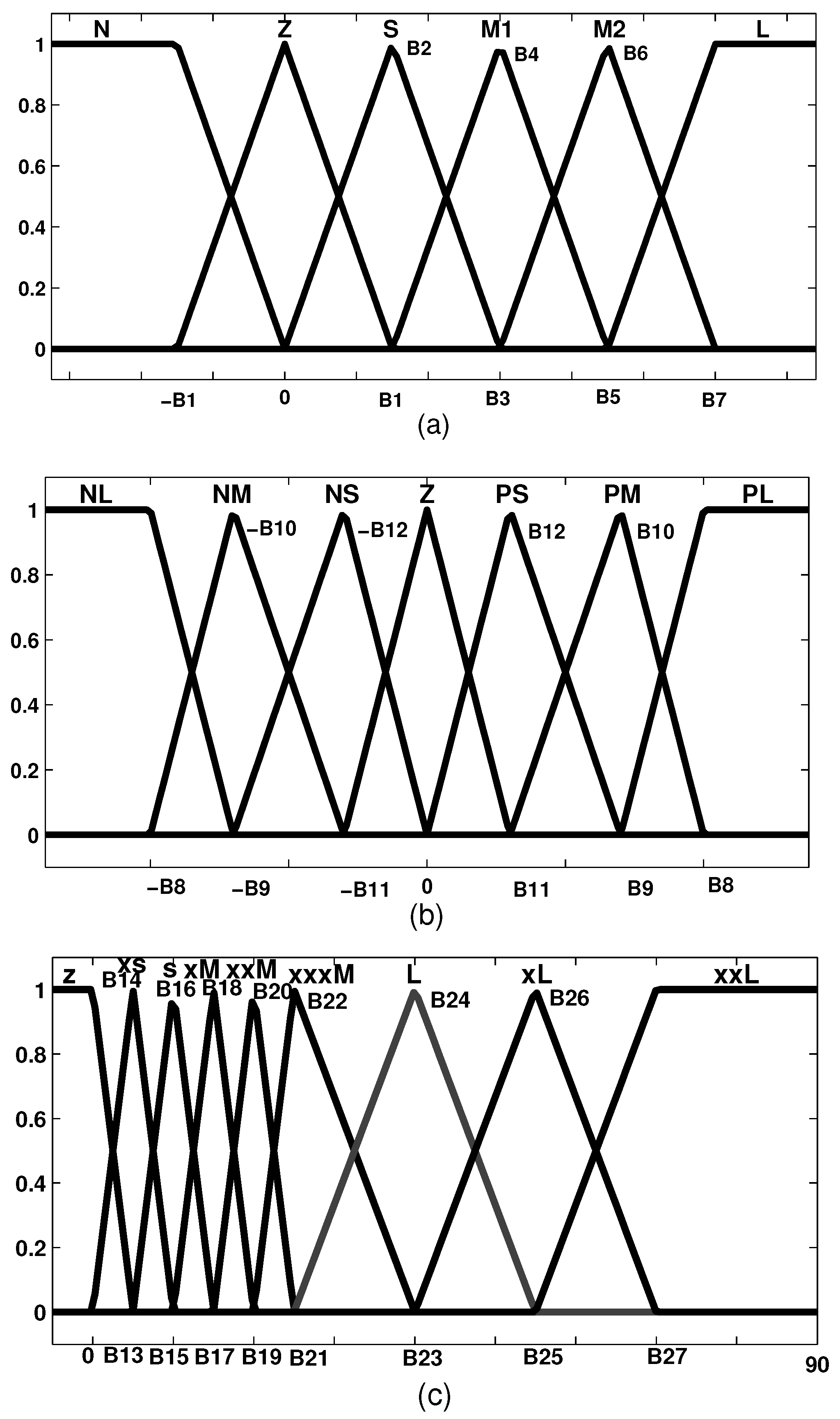
- The knowledge base is the heart of fuzzy system, as it determines how fuzzy logic operations are performed. It consists of fuzzy IF–THEN rules. The database contains the membership functions of fuzzy subsets. A fuzzy rule includes fuzzy variables and the fuzzy subset described by membership function. Triangular, trapezoid, and Gaussian functions are the more standard membership functions used in FLC.
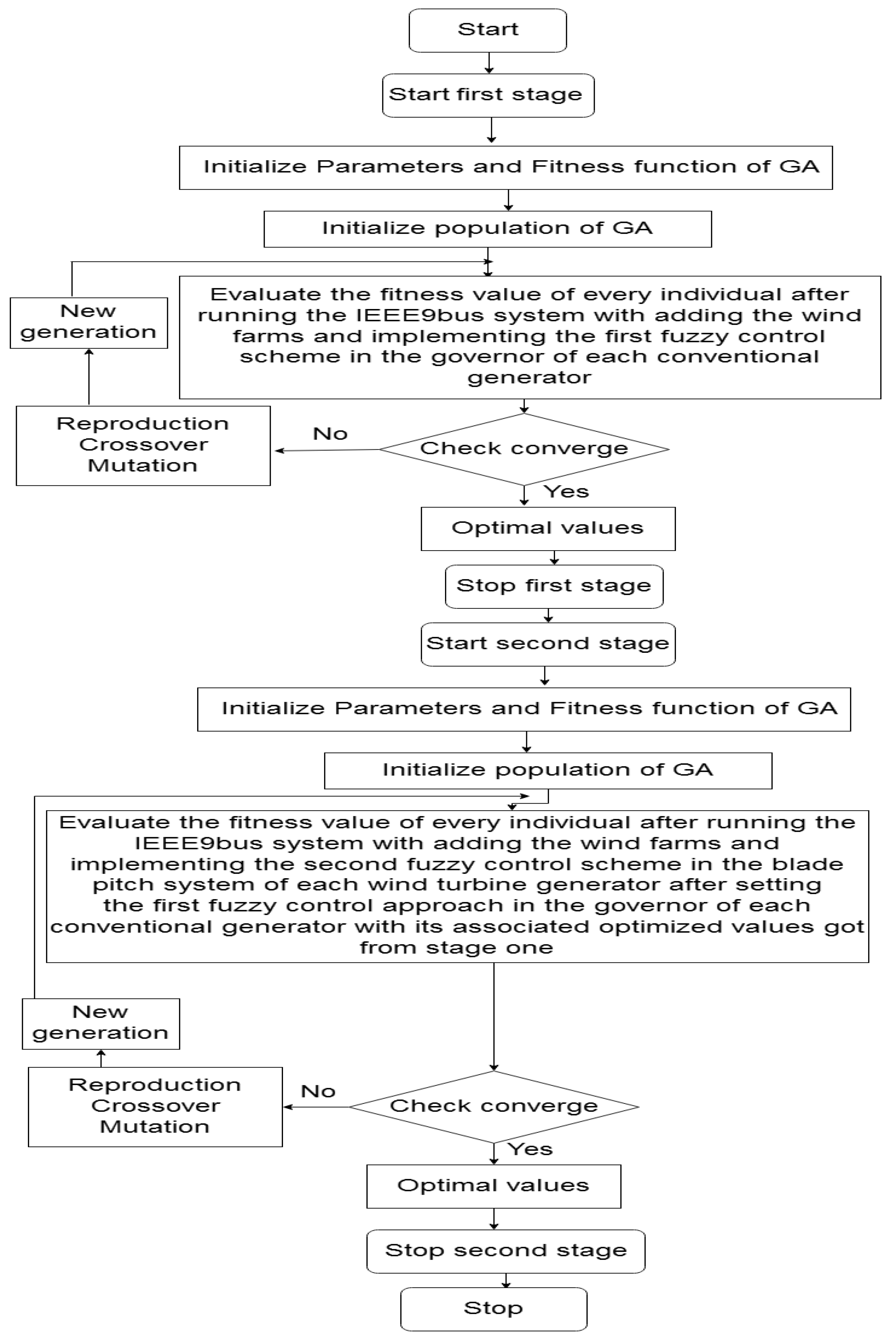
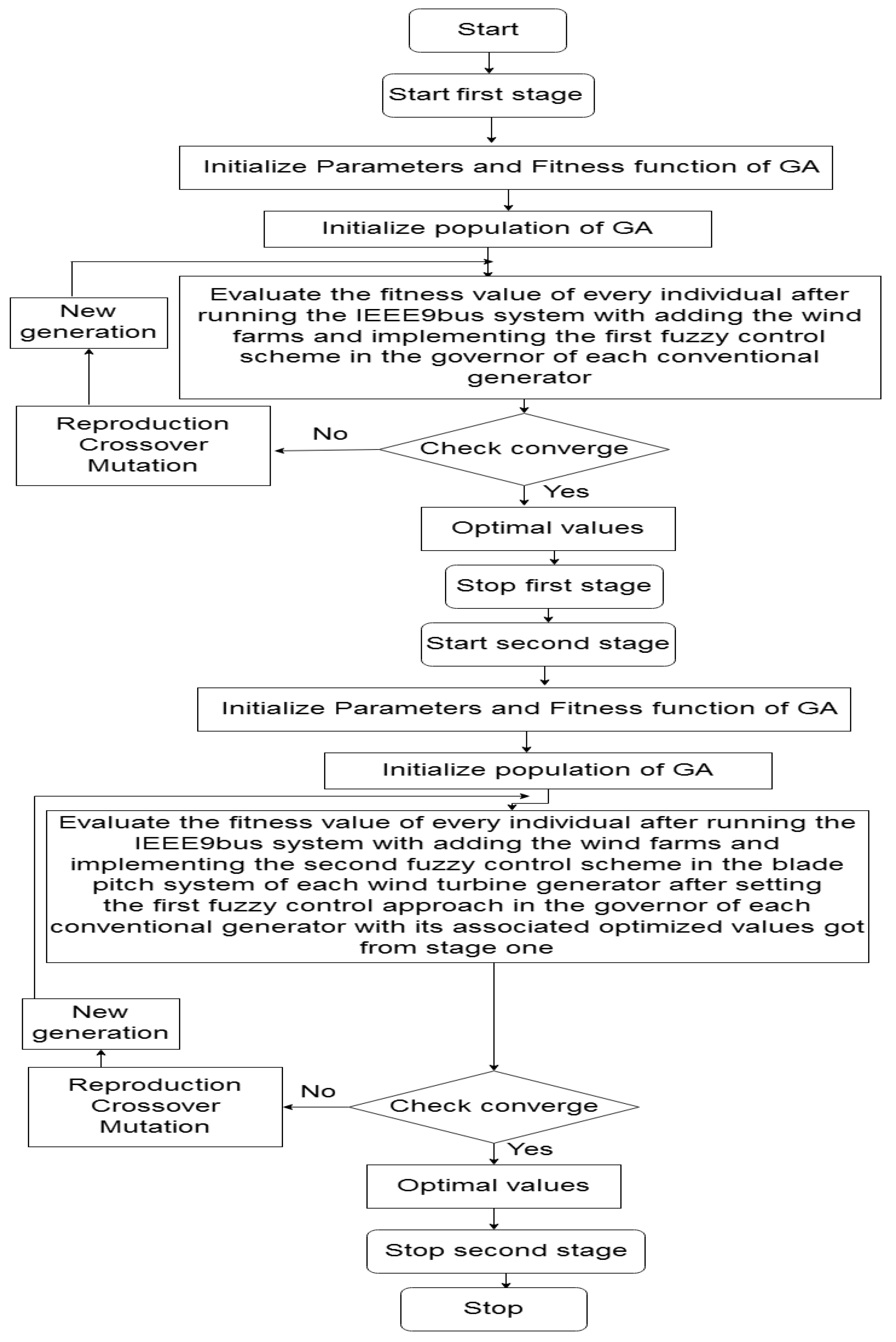
3.2. Genetic Algorithm
- Elite children are individuals in the current generation with the best fitness values. These individuals automatically survive to the next generation.
- Crossover children are created by combining the vectors of a pair of parents.
- Mutated children are created by introducing random changes to a single parent. Both processes of crossover and mutation are essential to the GA. Crossover enables the algorithm to extract the best genes from different individuals and recombine them to get potentially superior children. While, mutation improves the diversity of the population to increase the probability that the algorithm will generate individuals with better fitness values. The algorithm is repeated for many generations till stops if one of the stopping criteria is met.
3.3. Proposed GA–Fuzzy-Based Control Schemes
3.3.1. Governor Control System
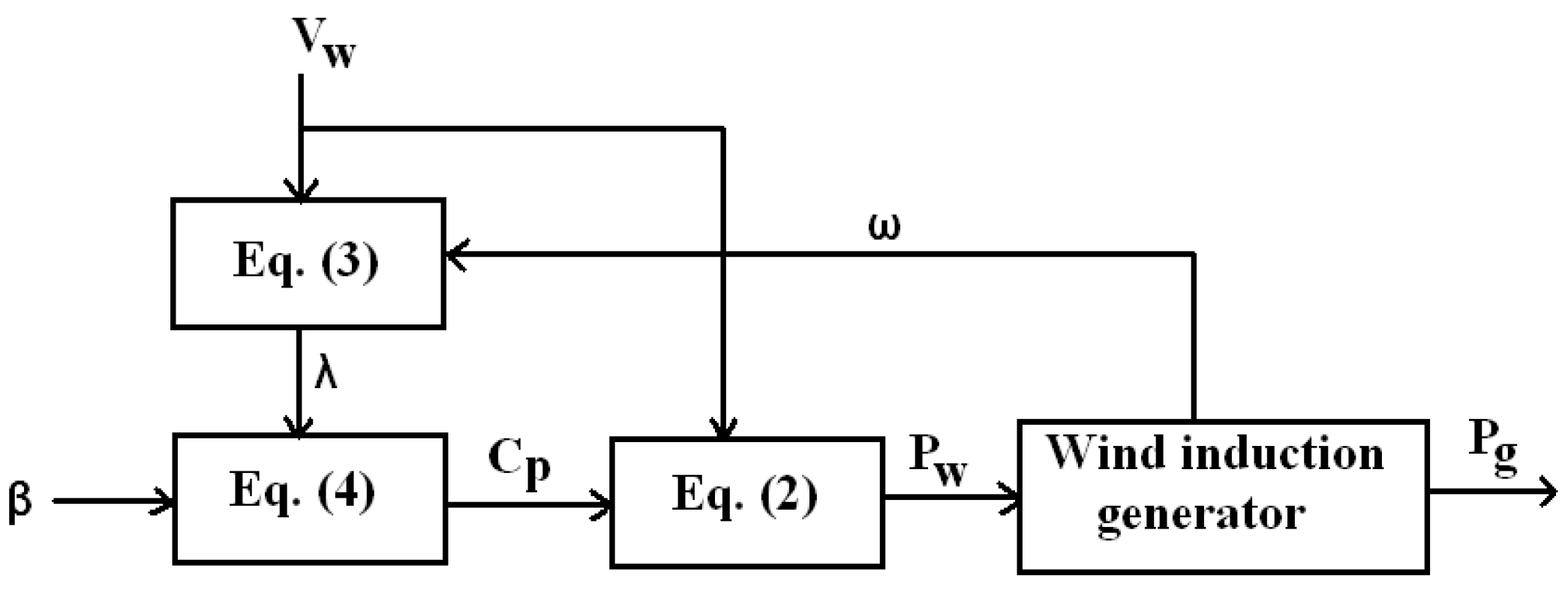
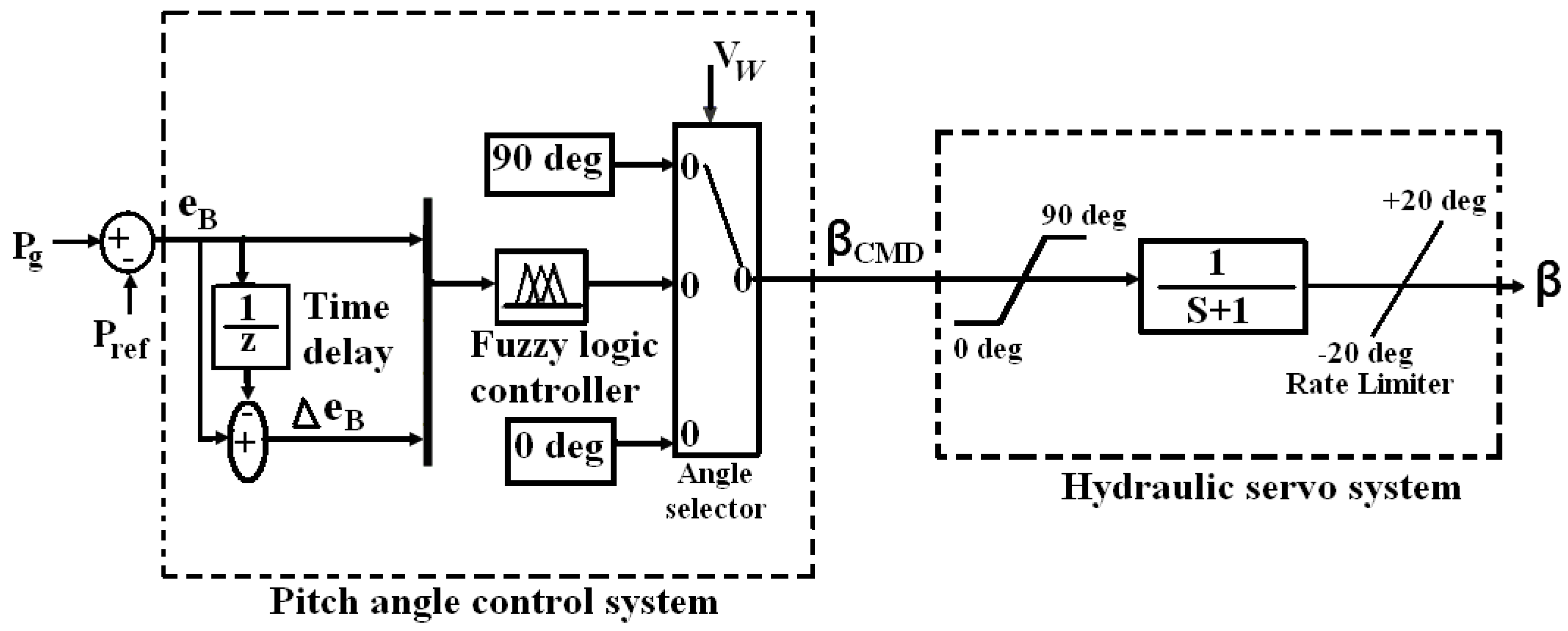
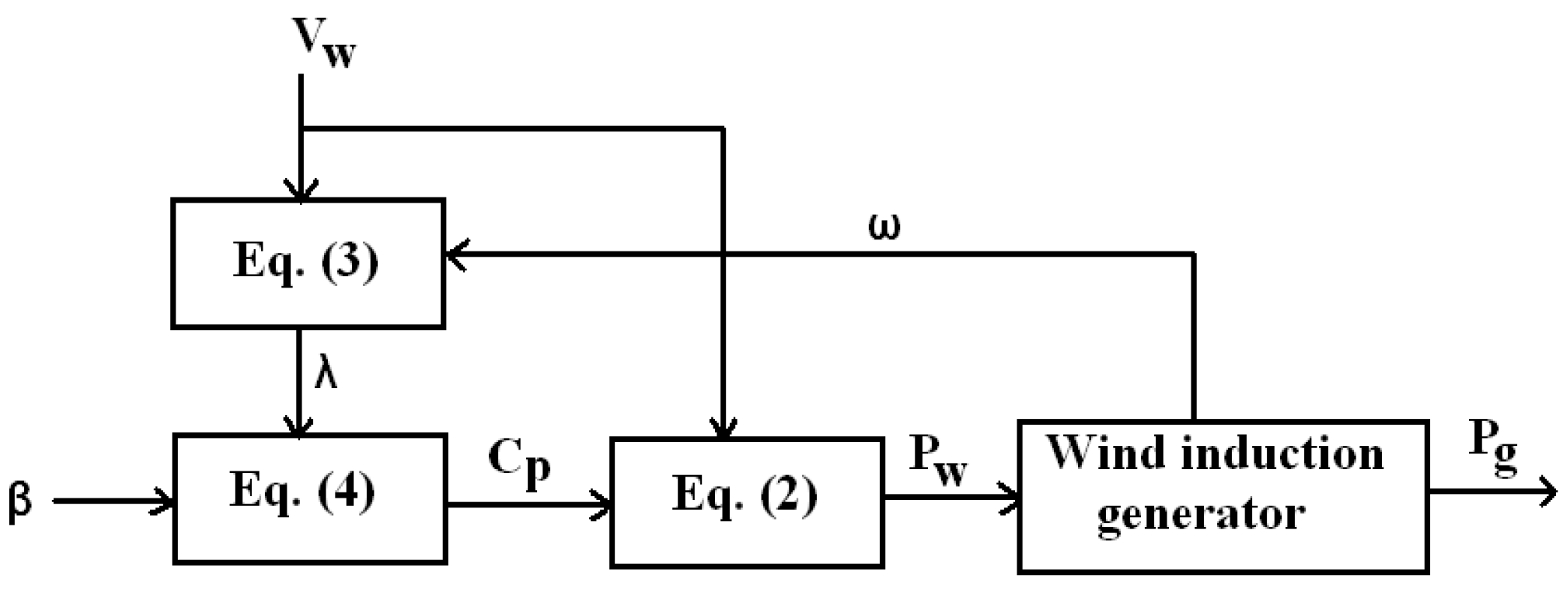
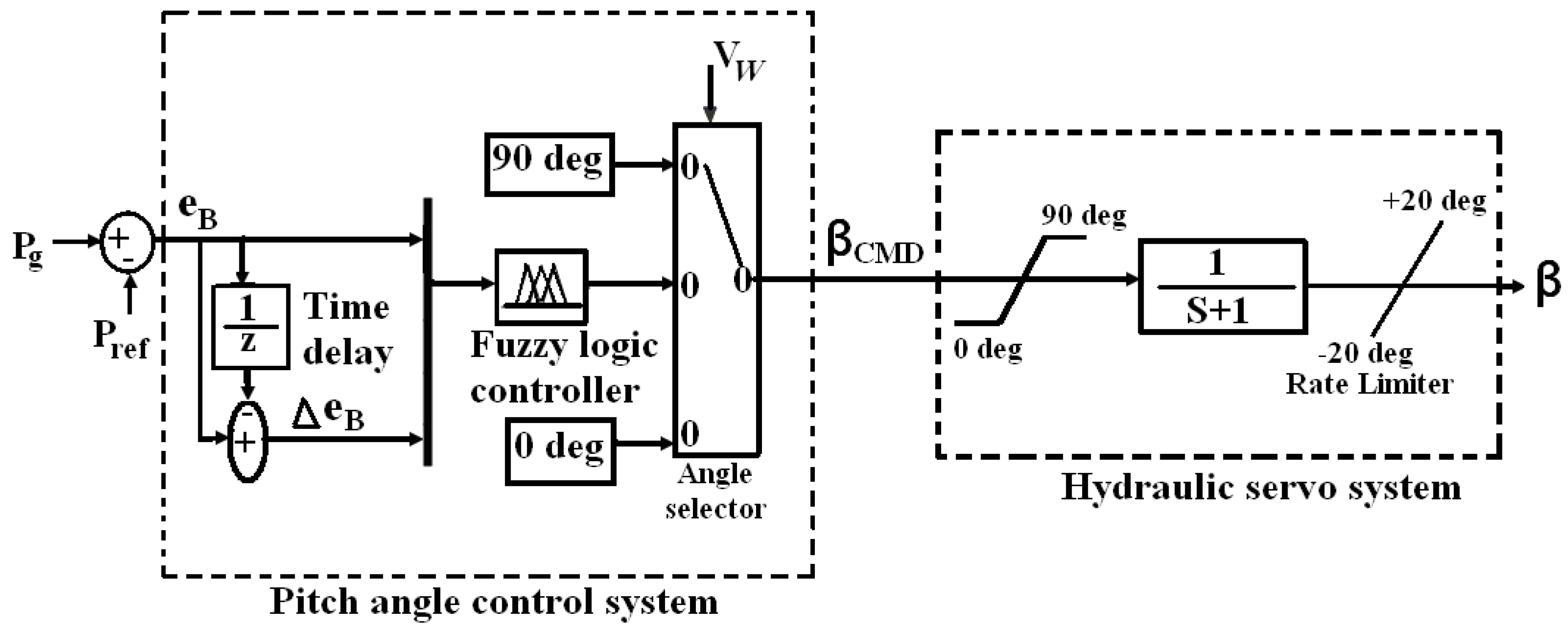
3.3.2. Pitch Angle Control System
3.4. Limitations of the Adopted Control Schemes
4. Results
4.1. Conventional Method (Case 1)
4.2. Case 2
4.3. Case 3
4.4. Faulty Operating Condition (Case 4)
5. Result Analysis
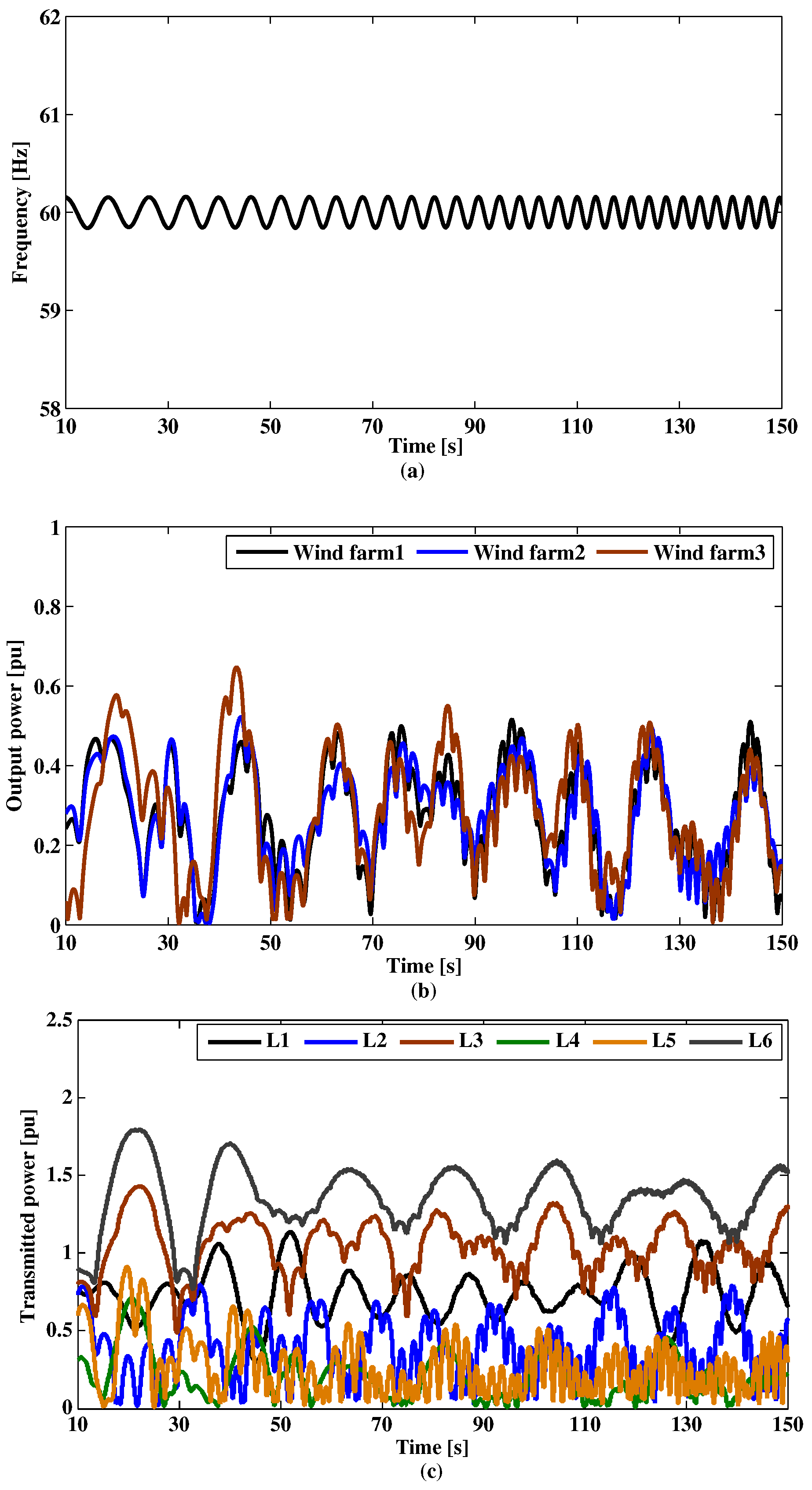
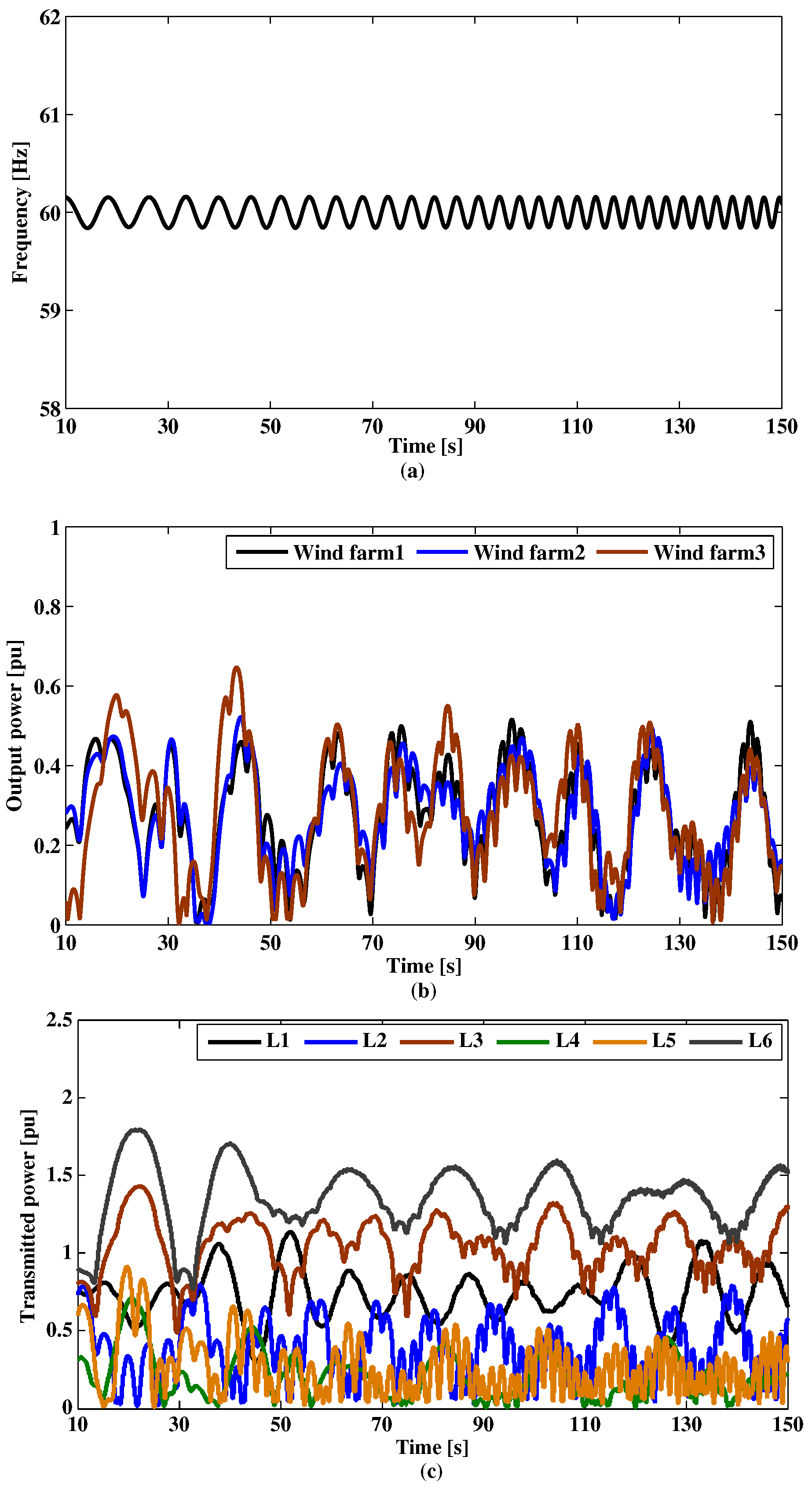
- Case 1 represents the implementation of three wind farms in the stable IEEE nine-bus three-generator system with high penetration (25%) that leads to significant system instability appearing in frequency oscillation around 60.2 Hz–59.8 Hz. This forces frequency relays to trip in some portions of the system. Also, there are great fluctuations in the output power of wind farms in the range of 0–0.6 pu which leads to oscillations in the transmitted power between 0 and 1.7 pu. Hence, the majority of loads in this case cannot be met with a continuous power supply within acceptable frequency limits, which decreases the reliability and power quality of the system with harming loads, especially those are sensitive for frequency fluctuations and voltage flicker, with a decrease in their life time.
- Case 2 shows the application of the first hybrid GA-fuzzy based control approach to the governor system of the conventional generators. As a result, the proposed constant frequency of 60 Hz is achieved as shown in Figure 11. Besides, output power fluctuations of wind farms still exist in range of 0–0.6 pu which derive to the transmitted power deviations in lower amounts compared to those in case 1. Hence, the first controller succeeded in damping frequency oscillations but some fluctuations still appeared in power responses.
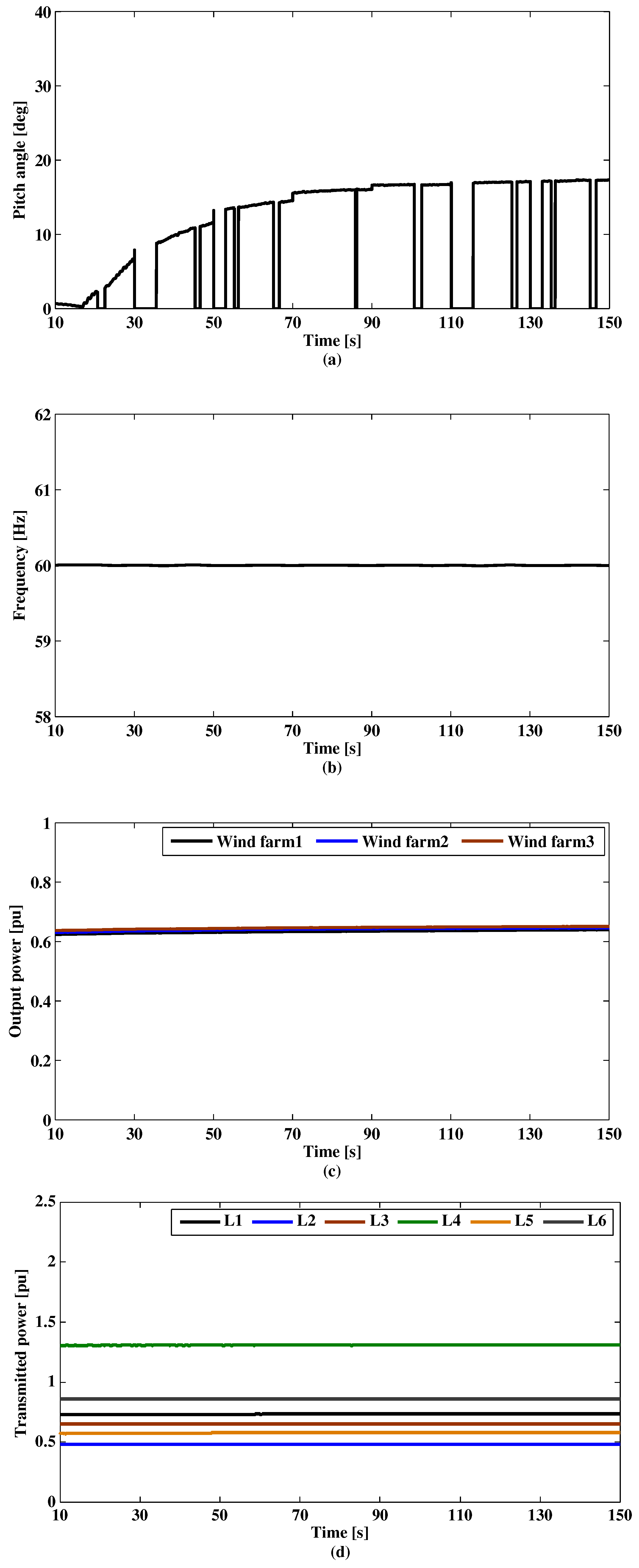
- Case 3 involves the proposed scenario presenting implementation of the two hybrid GA-fuzzy based control approaches in the power system. The first approach is applied for the governor of conventional generators, while the second is used for the pitch angle control system of wind farms. Simulation results shown in Figure 12 confirm the ability of the first controller to keep frequency constant at 60 Hz. Also, the second controller can suppress the output power fluctuations of wind farms and ensure constant power at around 0.63 pu (63 MW) of each wind farm, even with variable wind speed, due to effective blade pitch angle control as shown in Figure 12. Beside this, control techniques succeeded to damp transmitted power oscillations ensuring continuous power supply to customers with high power quality.
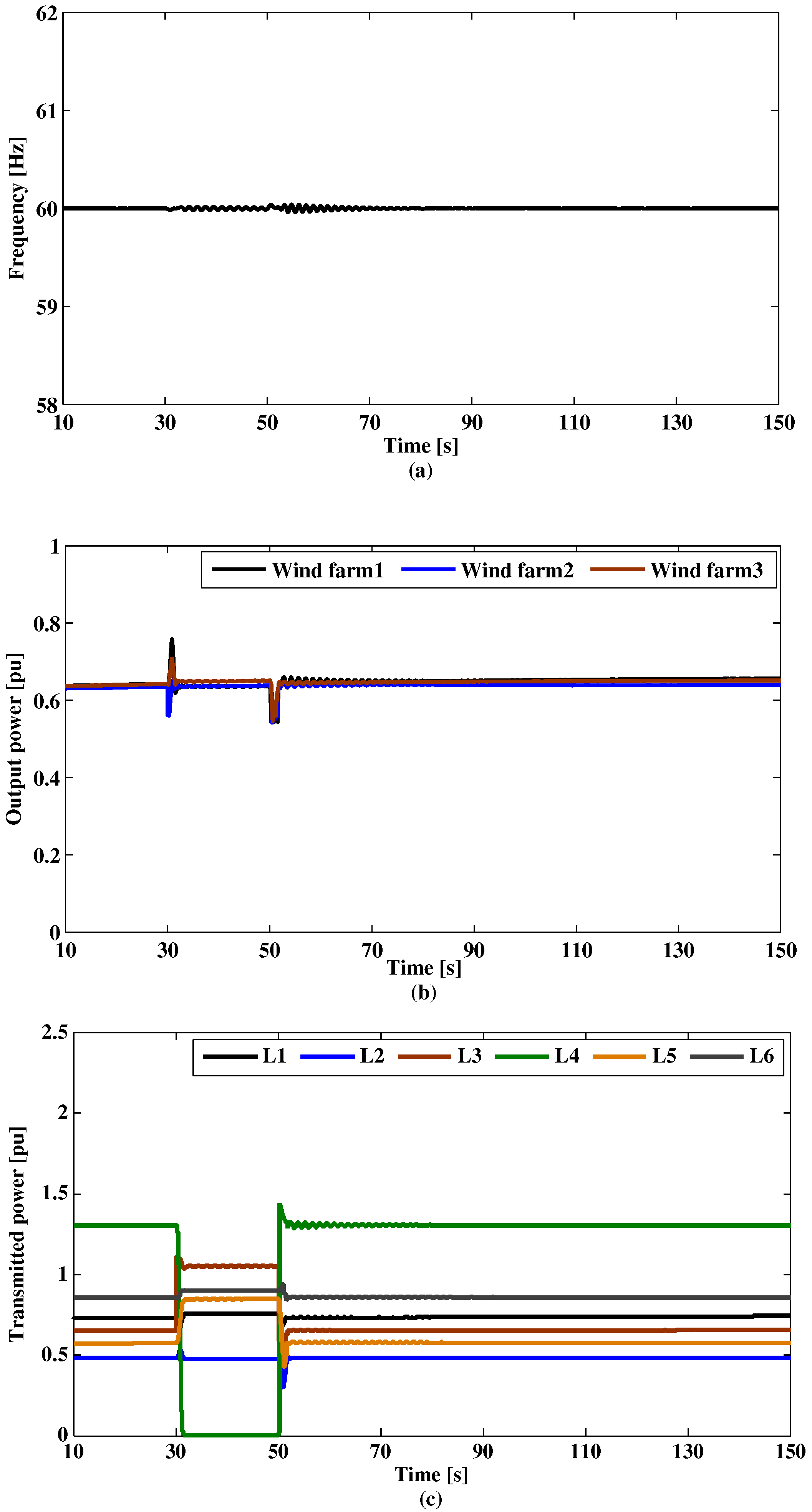
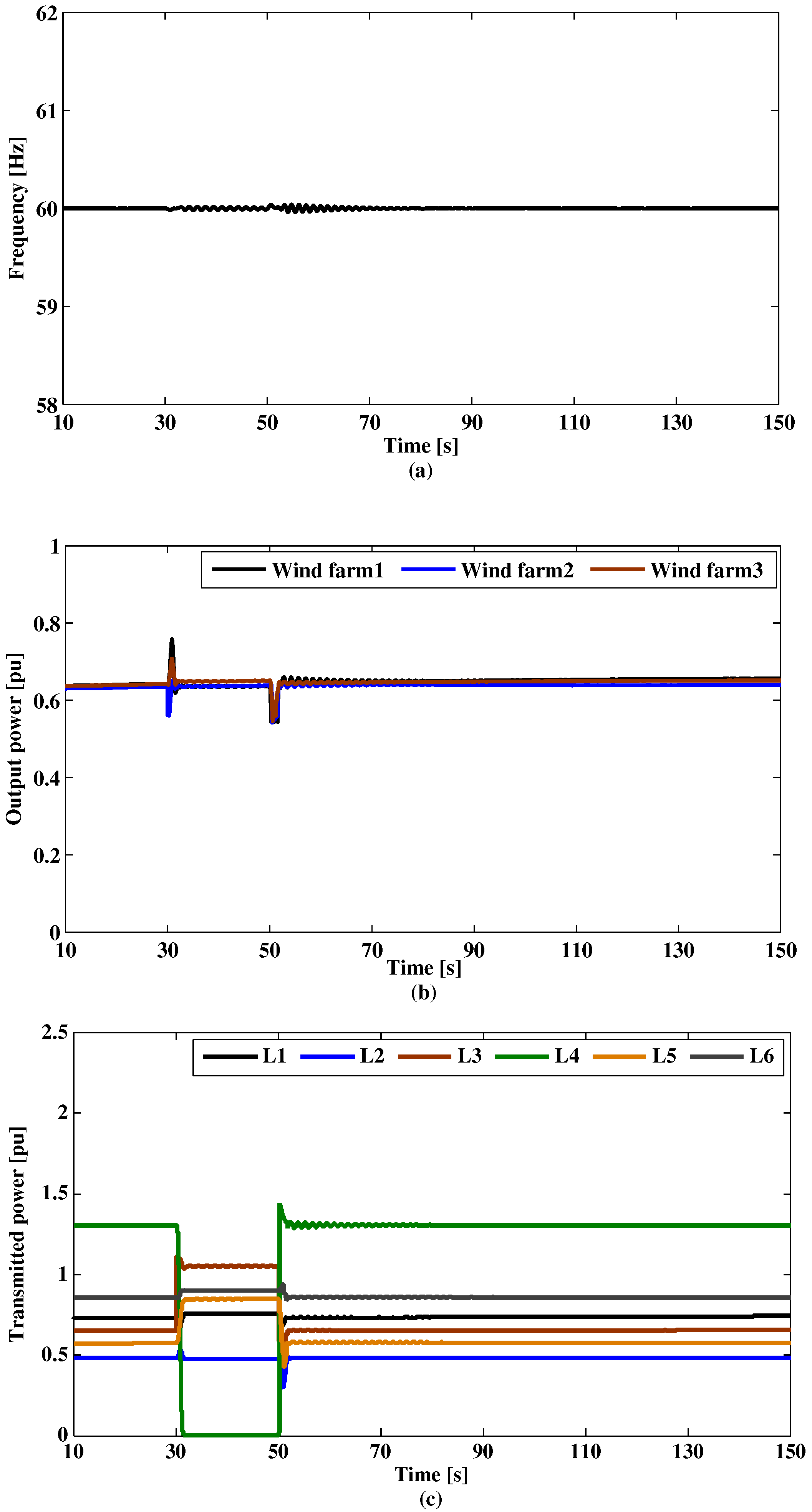
- To validate the robustness of the proposed control schemes in emergencies, a three-phase to ground fault at the most loaded transmission line is considered in case 4. The fault occurs at s and is cleared at s. Simulation results indicate the ability of the control techniques to damp frequency and wind power fluctuations, with reducing sudden overshoots at times of fault occurrence and clearance, respectively. As a result of transmission line outage, the transmitted power via the remaining transmission lines is redistributed to compensate the transmission line outage and ensure continuous power feeding for loads. After fault clearance, the power system comes back safely to its normal operating point thanks to the proposed control schemes with damping all power and frequency fluctuations and ensuring continuous power supply of the system with high power quality without any harmful effects to the sensitive loads even in severe operating conditions is ensured.
6. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| - | Transmission lines of the IEEE nine-bus system |
| - | Three implemented wind farms in the IEEE nine-bus system |
| Rotor speed | |
| R | Speed regulation of each generator |
| Frequency deviation of power system | |
| Pitch angle | |
| Air density | |
| A | Rotor swept area |
| r | Blade radius |
| Aerodynamic power coefficient | |
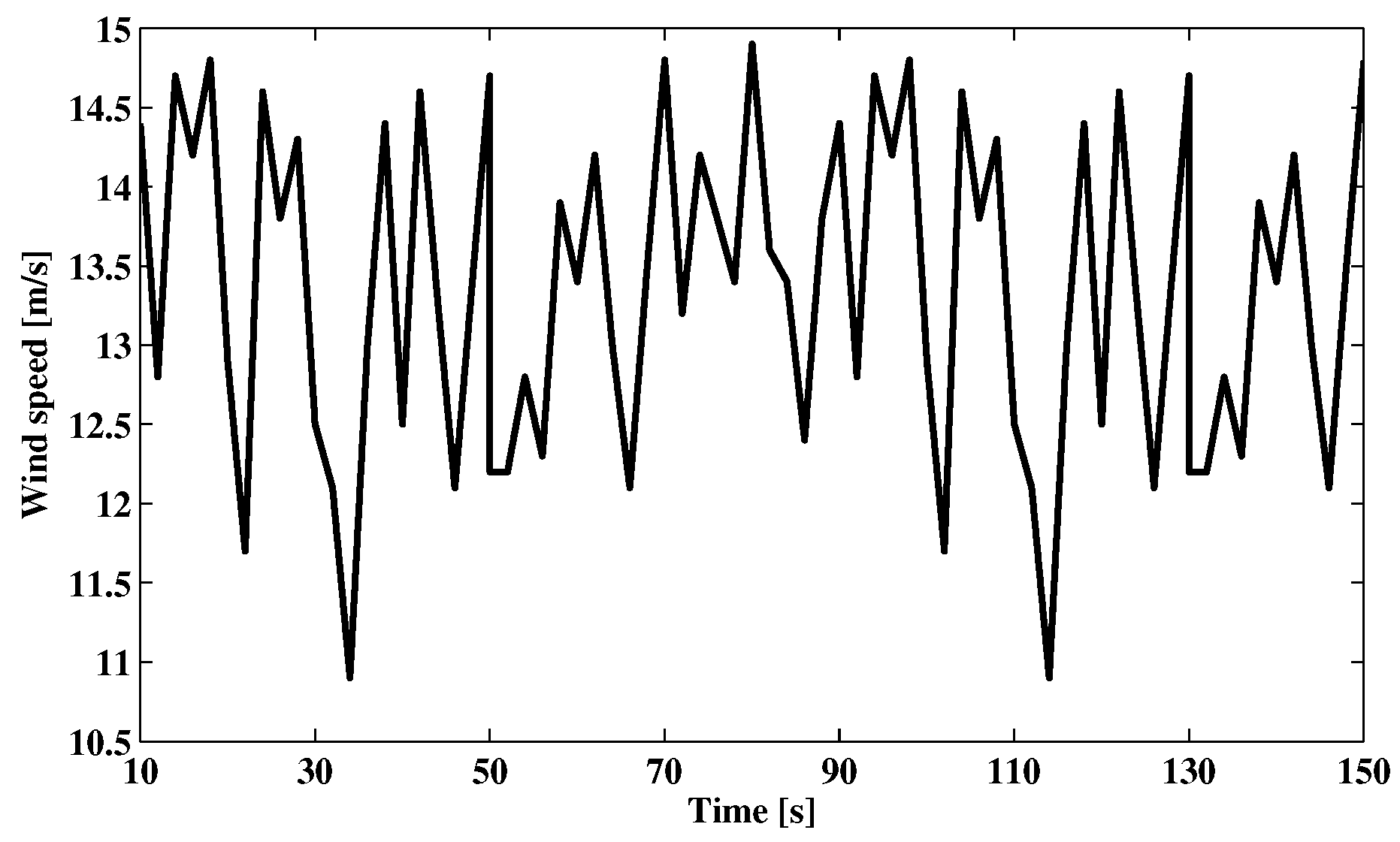
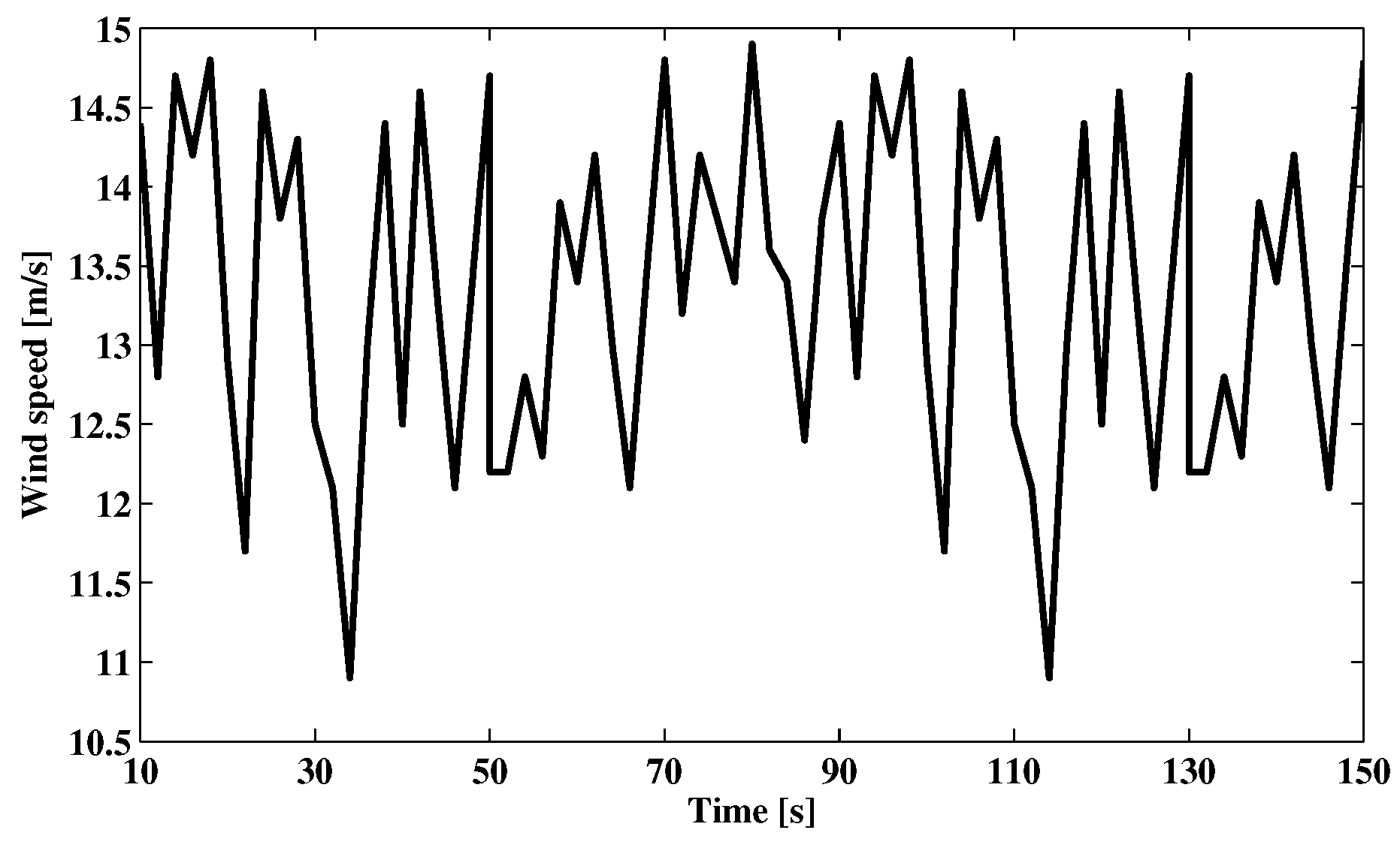
| Wind speed | |
| Tip speed ratio | |
| Blade rotational speed | |
| Pitch angle command | |
| WTG output power fluctuations |
References
- Hunter, R.; Eillot, G. Wind-Diesel Systems: A Guide to Technology and Its Implementation; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]
- Nacfaire, H. Wind-Diesel and Autonomous Energy Systems; Elsevier Science Publishers Ltd.: Amsterdam, Netherlands, 1989. [Google Scholar]
- Dhanalakshmi, R.; Palaniswami, S. Application of multi stage fuzzy logic control for load frequency control of an isolated wind diesel hybrid power system. In Proceedings of the 2011 International Conference on Green Technology and Environmental Conservation (GTEC 2011), Chennai, India, 15–17 December 2011; pp. 309–315. [Google Scholar]
- Chowdhury, M.; Hossienzadeh, N.; Shen, W. Smoothing wind power fluctuations by fuzzy logic pitch angle controller. Renew. Energy 2012, 38, 224–233. [Google Scholar] [CrossRef]
- Kamel, R.; Chaouachi, A.; Nagasaka, K. Wind power smoothing using fuzzy logic pitch controller and energy capacitor system for improvement Micro-Grid performance in islanding mode. Energy 2010, 35, 2119–2129. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. Coordinated control of wind turbine blade pitch angle and PHEVs using MPCs for load frequency control of microgrid. IEEE Syst. J. 2016, 10, 97–105. [Google Scholar] [CrossRef]
- Supriyadi, C.; Nandar, A. Robust PI control of smart controllable load for frequency stabilization of microgrid power system. Renew. Energy 2013, 56, 16–23. [Google Scholar]
- Ekelund, T. Speed control of wind turbines in the stall region. In Proceedings of the Third IEEE Conference on Control Applications, Glasgow, UK, 24–26 August 1994; pp. 227–232. [Google Scholar]
- Shaked, U.; Soroka, E. On the stability robustness of the continuous time LQG optimal control. IEEE Trans. Autom. Control 1985, AC-30, 1039–1043. [Google Scholar] [CrossRef]
- Gampa, S.; Das, D. Real power and frequency control of a small isolated power system. Int. J. Electr. Power Energy Syst. 2015, 64, 221–232. [Google Scholar] [CrossRef]
- Viveiros, C.; Melicio, R.; Igreja, J.; Mendes, V. Performance assessment of a wind energy conversion system using a hierarchical controller structure. Energy Convers. Manag. 2015, 93, 40–48. [Google Scholar] [CrossRef]
- Lasheen, A.; Elshafei, A. Wind turbine collective-pitch control via a fuzzy predictive algorithm. Renew. Energy 2016, 87, 298–306. [Google Scholar] [CrossRef]
- Van, T.; Nguyen, T.; Lee, D. Advanced pitch angle control based on fuzzy logic for variable-speed wind turbine systems. IEEE Trans. Energy Convers. 2015, 30, 578–587. [Google Scholar] [CrossRef]
- Han, B.; Zhou, L.; Yang, F.; Xiang, Z. Individual pitch controller based on fuzzy logic control for wind turbine load mitigation. IET Renew. Power Gener. 2016, 10, 687–693. [Google Scholar] [CrossRef]
- Sakamoto, R.; Senjyu, T.; Urasaki, N.; Takagi, T.; Sugimoto, S. Output power leveling of wind turbine generator by pitch angle control using H∞ control. Electr. Eng. Jpn. 2008, 126, 17–24. [Google Scholar] [CrossRef]
- Corcuera, A.; Arrese, A.; Ezquerra, J.; Segurola, E.; Landaluze, J. H∞ based control for load mitigation in wind turbines. Energies 2012, 5, 938–967. [Google Scholar] [CrossRef]
- Muhando, B.; Wies, R. Nonlinear H∞ constrained feedback control for grid interactive WECS under high stochasticity. IEEE Trans. Energy Convers. 2011, 26, 1000–1009. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-synthesis approaches. IEEE Trans. Smart Grid 2016, 7, 706–717. [Google Scholar] [CrossRef]
- Mohamed, T.; Morel, J.; Bevrani, H.; Hiyama, T. Model predictive based load frequency control design concerning wind turbines. Int. J. Electr. Power Energy Syst. 2012, 43, 858–867. [Google Scholar] [CrossRef]
- Tarkeshwar, M.; Mukherjee, V. Quai-oppositional harmony search algorithm and fuzzy logic controller for load frequency stabilization of an isolated hybrid power system. IET Gener. Transm. Distrib. 2015, 9, 427–444. [Google Scholar] [CrossRef]
- Lotfy, M.; Senjyu, T.; Farahat, M.; Abdel-Gawad, A.; Yona, A. A frequency control approach for hybrid power system using multi-objective optimization. Energies 2017, 10, 80. [Google Scholar] [CrossRef]
- Lotfy, M.; Senjyu, T.; Farahat, M.; Abdel-Gawad, A.; Yona, A. Enhancement of a small power system performance using multi-objective optimization. IEEE Access 2017, 5, 6212–6224. [Google Scholar] [CrossRef]
- Lotfy, M.; Senjyu, T.; Farahat, M.; Abdel-Gawad, A.; Matayoshi, H. A Polar fuzzy control scheme for hybrid power system using vehicle-to-grid technique. Energies 2017, 10, 1083. [Google Scholar] [CrossRef]
- Bevrani, H.; Daneshmand, P. Fuzzy logic-based load-frequency control concerning high penetration of wind turbines. IEEE Syst. J. 2012, 6, 173–180. [Google Scholar] [CrossRef]
- Bevrani, H.; Daneshmand, P.; Babahajyani, P.; Mitani, Y.; Hiyama, T. Intelligent LFC concerning high penetration of wind power: synthesis and real-time application. IEEE Trans. Sustain. Energy 2013, 5, 655–662. [Google Scholar] [CrossRef]
- Bevrani, H.; Ghosh, A.; Ledwich, G. Renewable energy sources and frequency regulation: survey and new perspectives. IET Renew. Power Gener. 2010, 4, 438–457. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S.; Li, T. Hybrid fuzzy adaptive output feedback control design for uncertain MIMO nonlinear systems with time-varying delays and input saturation. IEEE Trans. Fuzzy Syst. 2016, 24, 841–853. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S.; Li, T. Observer-based adaptive fuzzy tracking control of MIMO stochastic nonlinear systems with unknown control directions and unknown dead-zones. IEEE Trans. Fuzzy Syst. 2015, 23, 1228–1241. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S.; Li, T. Composite adaptive fuzzy output feedback control design for uncertain nonlinear strict-feedback systems with input saturation. IEEE Trans. Cybern. 2015, 45, 2299–2308. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Wu, C.; Shi, P.; Gao, Y. Control of nonlinear networked systems with packet dropouts: interval type-2 fuzzy model-based approach. IEEE Trans. Cybern. 2015, 45, 2378–2389. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Zhang, Y.; Qiu, J.; Gao, H. Adaptive fuzzy backstepping control for a class of nonlinear systems with sampled and delayed measurements. IEEE Trans. Fuzzy Syst. 2015, 23, 302–312. [Google Scholar] [CrossRef]
- Sawle, Y.; Gupta, S.; Bohre, A. PV-wind hybrid system: A review with case study. Cogent Eng. 2016, 3, 1189305. [Google Scholar] [CrossRef]
- Ou, T.; Hong, C. Dynamic operation and control of microgrid hybrid power systems. Energy 2014, 66, 314–323. [Google Scholar] [CrossRef]
- Hong, C.; Ou, T.; Lu, K. Development of intelligent MPPT (maximum power point tracking) control for a grid-connected hybrid power generation system. Energy 2013, 50, 270–279. [Google Scholar] [CrossRef]
- Shiau, J.; Wei, Y.; Lee, M. Fuzzy controller for a voltage-regulated solar-powered MPPT system for hybrid power system applications. Energies 2015, 8, 3292–3312. [Google Scholar] [CrossRef]
- Ou, T.; Su, W.; Liu, X.; Huang, S.; Tai, T. A modified bird-mating optimization with hill-climbing for connection decisions of transformers. Energies 2016, 9, 671. [Google Scholar] [CrossRef]
- Ou, T. A novel unsymmetrical faults analysis for microgrid distribution systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1017–1024. [Google Scholar] [CrossRef]
- Ou, T. Ground fault current analysis with a direct building algorithm for microgrid distribution. Int. J. Electr. Power Energy Syst. 2013, 53, 867–875. [Google Scholar] [CrossRef]
- Gonzalez, A.; Riba, J.; Ruis, A.; Puig, R. Optimal sizing of a hybrid grid-connected photovoltaic and wind power system. Appl. Energy 2015, 154, 752–762. [Google Scholar] [CrossRef] [Green Version]
- Ou, T.; Lu, K.; Huang, C. Improvement of transient stability in a hybrid power multi-system using a designed NIDC (novel intelligent damping controller). Energies 2017, 10, 488. [Google Scholar] [CrossRef]
- Debnath, M.; Jena, T.; Mallick, R. Optimal design of PD-fuzzy-PID cascaded controller for automatic generation control. Cogent Eng. 2017, 4, 1416535. [Google Scholar] [CrossRef]
- Upadhyay, S.; Sharma, M. A review on configurations, control and sizing methodologies of hybrid energy systems. Renew. Sustain. Energy Rev. 2014, 38, 47–63. [Google Scholar] [CrossRef]
- Anderson, P.; Fouad, A. Power System Control and Stability; IEEE Press: New York, NY, USA, 1994. [Google Scholar]
- Sudha, K.; Santhi, R. load frequency control of an interconnected reheat thermal system using Type-2 fuzzy system including SMES units. Int. J. Electr. Power Energy Syst. 2012, 43, 1383–1392. [Google Scholar] [CrossRef]
- Simoes, M.; Bose, B.; Spiegel, R. Design and performance evaluation of fuzzy-logic-based variable-speed wind generation system. IEEE Trans. Ind. Appl. 1997, 33, 956–965. [Google Scholar] [CrossRef]
- Ross, T. Fuzzy Logic with Engineering Applications; John Wily & Sons Ltd.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Tsoukalas, L.; Uhrig, R. Fuzzy and Natural Approaches in Engineering; Wiley: New York, NY, USA, 1997. [Google Scholar]
- Goldberg, D. Genetic Algorithm in Search, Optimization and Machine Learning; Addison-Wesley Publishing Company Inc.: Boston, MA, USA, 1989. [Google Scholar]
- Shivakumar, R.; Lakshmipathi, R. Implementation of an innovative bio inspired GA and PSO algorithm for controller design considering steam GT dynamics. Int. J. Comput. Sci. Issues 2010, 7, 18–28. [Google Scholar]
- Pand, S.; Yadav, J.; Patidar, N.; Ardil, C. Evolutionary Techniques for model order reduction of large scale linear systems. Int. J. Eng. App. Sci. 2009, 5, 22–28. [Google Scholar]
- Lee, D.; Wang, L. Small-signal stability analysis of an autonomous hybrid renewable energy power generation/energy storage system part I: time-domain simulations. IEEE Trans. Energy Convers. 2008, 23, 311–320. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NL | NM2 | NM1 | NS | Z | PS | PM1 | PM2 | PL | ||
|---|---|---|---|---|---|---|---|---|---|---|
| NL | PL | PL | PM2 | PM2 | PM1 | PM1 | PS | PS | Z | |
| NM2 | PL | PM2 | PM2 | PM1 | PM1 | PS | Z | NS | NS | |
| NM1 | PL | PM2 | PM1 | PM1 | PS | Z | Z | NS | NM1 | |
| NS | PL | PM2 | PM1 | PS | PS | Z | NS | NS | NM1 | |
| Z | PM2 | PM1 | PS | PS | Z | NS | NM1 | NM1 | NM2 | |
| PS | PM1 | PS | PS | Z | NS | NM1 | NM1 | NM2 | NL | |
| PM1 | PS | PS | Z | Z | NS | NM1 | NM2 | NM2 | NL | |
| PM2 | PS | Z | Z | NS | NM1 | NM2 | NM2 | NL | NL | |
| PL | Z | NS | NM1 | NM2 | NM2 | NL | NL | NL | NL | |
| Variable | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | 0.078 | 0.058 | 0.066 | 0.05 | 0.031 | 0.017 | 0.013 | 0.082 | 0.072 | 0.076 | 0.039 |
| Variable | A12 | A13 | A14 | A15 | A16 | A17 | A18 | A19 | A20 | A21 | |
| Value | 0.061 | 0.017 | 0.035 | 0.541 | 0.331 | 0.482 | 0.253 | 0.291 | 0.157 | 0.223 |
| NL | NM | NS | Z | PS | PM | PL | ||
|---|---|---|---|---|---|---|---|---|
| N | Z | Z | Z | Z | Z | Z | Z | |
| Z | Z | Z | Z | Z | Z | Z | Z | |
| S | Z | XS | XS | XS | S | S | XM | |
| M1 | XS | S | S | XM | XM | XM | XXM | |
| M2 | S | S | XM | XM | XXM | XXM | XXXM | |
| L | XM | XXM | XXM | XXXM | L | XL | XXL | |
| Variable | B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | B9 |
|---|---|---|---|---|---|---|---|---|---|
| Value | 0.0342 | 0.0083 | 0.0453 | 0.0388 | 0.082 | 0.083 | 0.115 | 0.0125 | 0.012 |
| Variable | B10 | B11 | B12 | B13 | B14 | B15 | B16 | B17 | B18 |
| Value | 0.00122 | 0.0021 | 0.00432 | 2.43 | 3.87 | 8.56 | 6.24 | 13.86 | 12.13 |
| Variable | B19 | B20 | B21 | B22 | B23 | B24 | B25 | B26 | B27 |
| Value | 18.46 | 16.45 | 23.93 | 22.72 | 36.84 | 34.13 | 52.62 | 58.32 | 59.26 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lotfy, M.E.; Senjyu, T.; Farahat, M.A.-F.; Abdel-Gawad, A.F.; Lei, L.; Datta, M. Hybrid Genetic Algorithm Fuzzy-Based Control Schemes for Small Power System with High-Penetration Wind Farms. Appl. Sci. 2018, 8, 373. https://doi.org/10.3390/app8030373
Lotfy ME, Senjyu T, Farahat MA-F, Abdel-Gawad AF, Lei L, Datta M. Hybrid Genetic Algorithm Fuzzy-Based Control Schemes for Small Power System with High-Penetration Wind Farms. Applied Sciences. 2018; 8(3):373. https://doi.org/10.3390/app8030373
Chicago/Turabian StyleLotfy, Mohammed Elsayed, Tomonobu Senjyu, Mohammed Abdel-Fattah Farahat, Amal Farouq Abdel-Gawad, Liu Lei, and Manoj Datta. 2018. "Hybrid Genetic Algorithm Fuzzy-Based Control Schemes for Small Power System with High-Penetration Wind Farms" Applied Sciences 8, no. 3: 373. https://doi.org/10.3390/app8030373