A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier


Abstract
:1. Introduction
2. Problem Statement and Conceptual Model Establishment
2.1. Problem Statement
2.2. Essential Elements
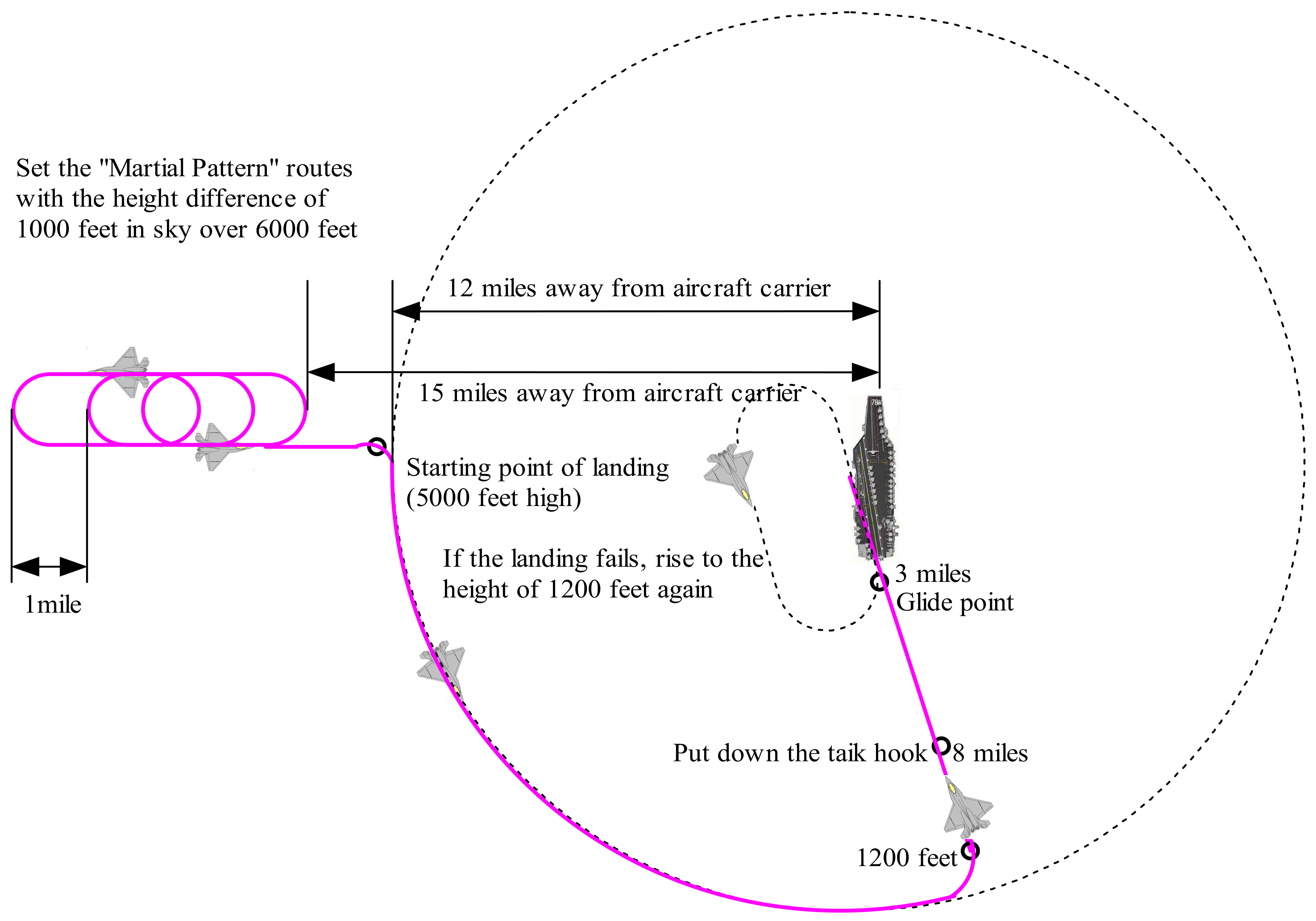
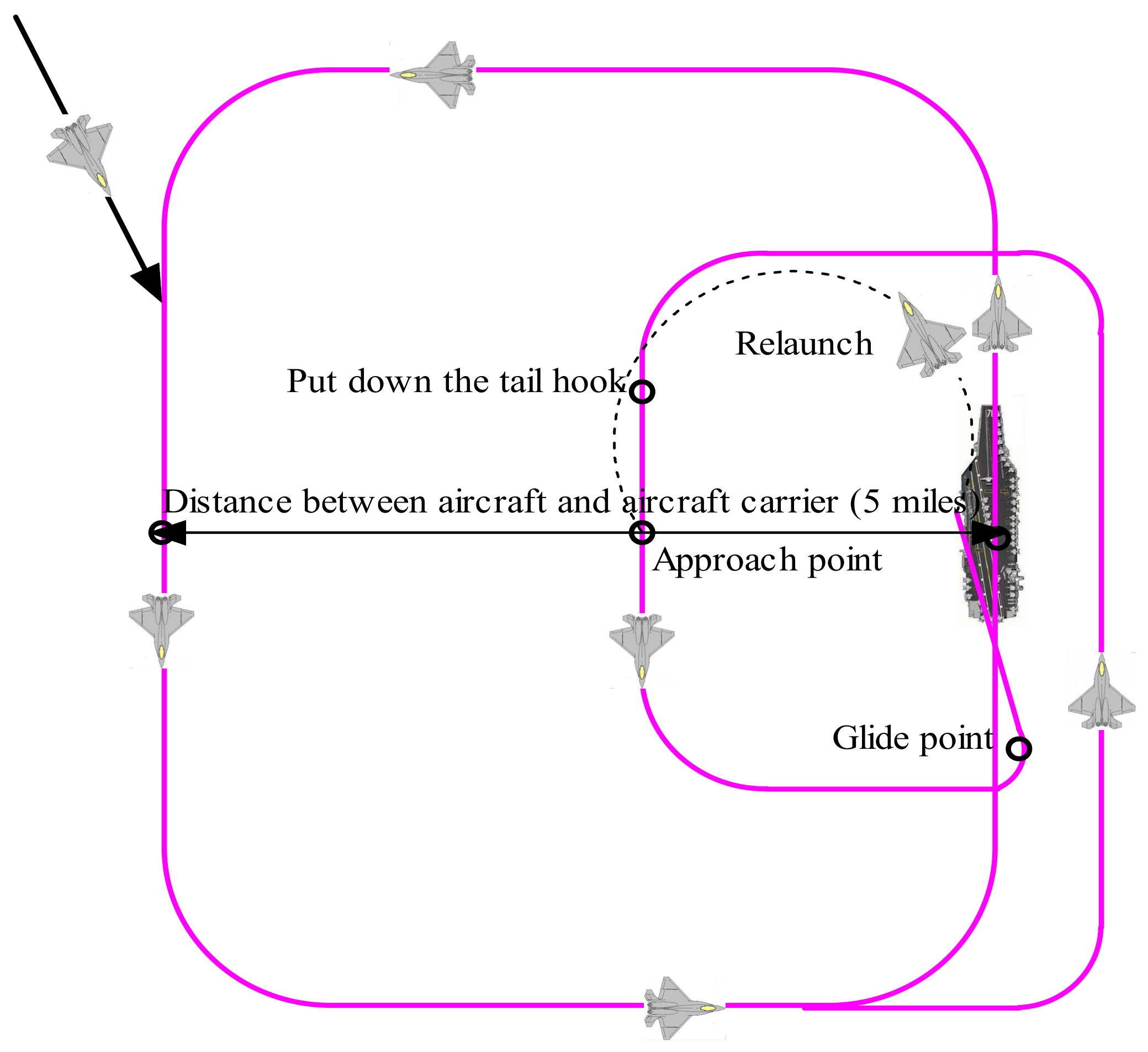
- The alternative landing paths:
- 2.
- The contributing factors:
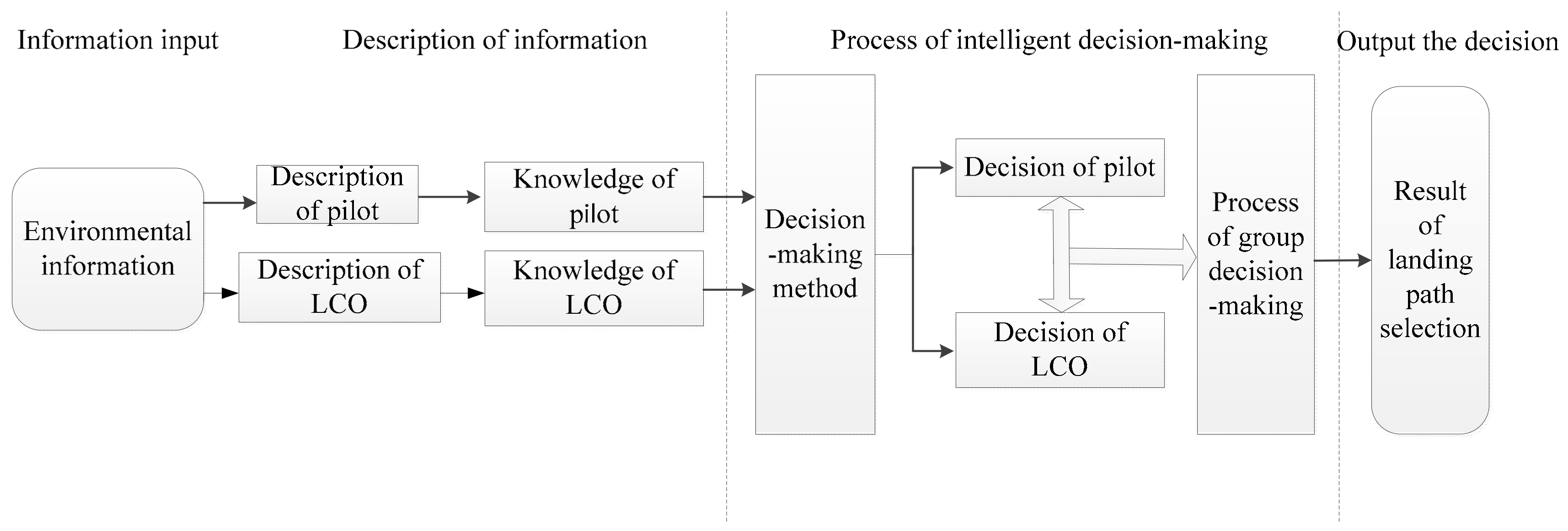
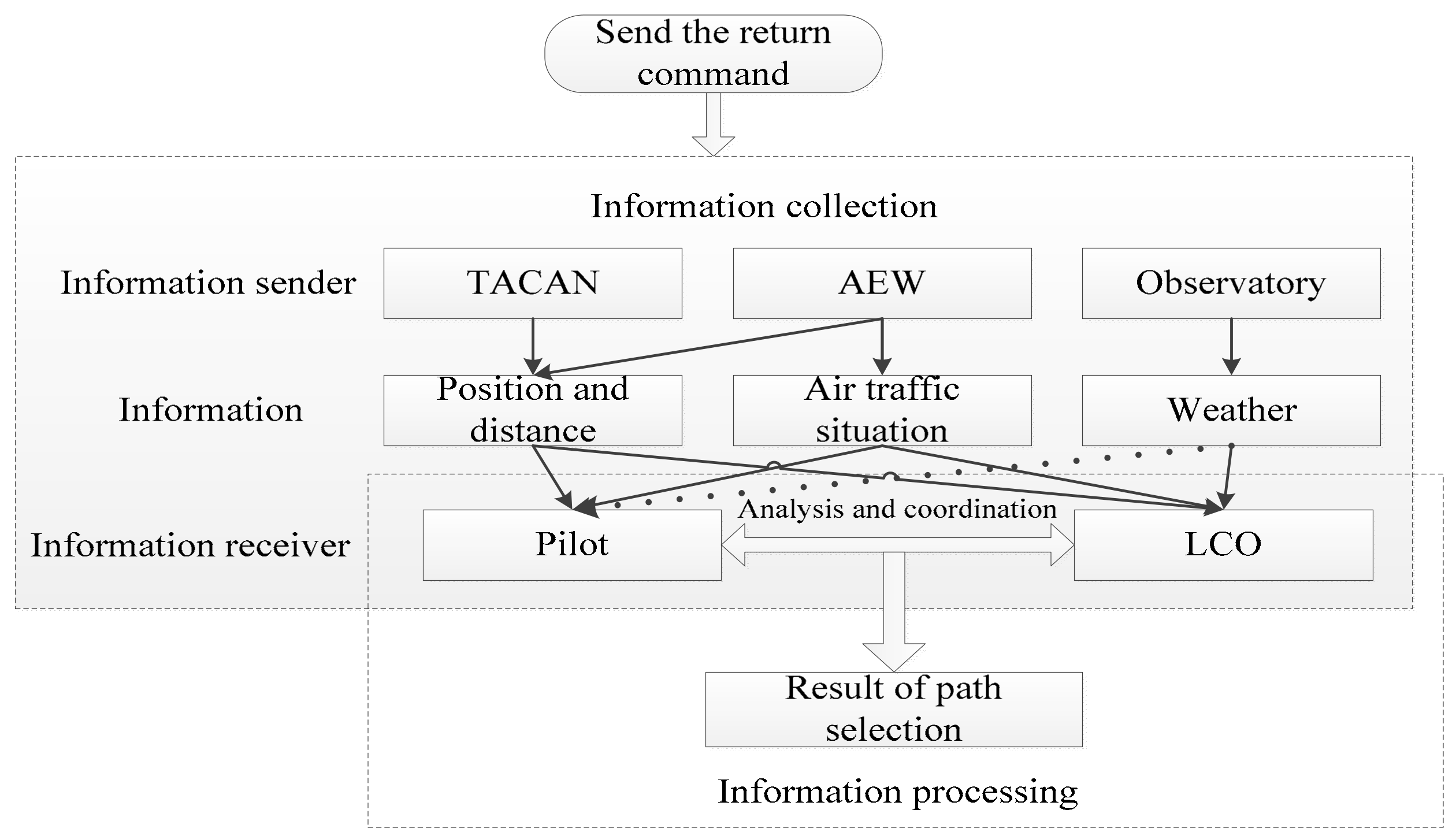
2.3. The Conceptual Model
3. Landing Path Selection Method Based on FMAGDM
3.1. The PRCF and the Current Environmental Vector
3.2. Landing Path Selection Process Based on the Fuzzy TOPSIS Approach
3.3. Process of the Group Decision-Making
4. Experimental Study on Landing Path Selection in Different Environments
4.1. Simulation Conditions and the Fuzzy Descriptions of Contributing Factors
4.2. Results with the Experience-based Method by the LCO
4.3. Results of Landing Path Selection by the Proposed Method and the Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Wu, Y.; Sun, L.; Qu, X. A sequencing model for a team of aircraft landing on the carrier. Aerosp. Sci. Technol. 2016, 54, 72–87. [Google Scholar] [CrossRef]
- Tian, J.; Dai, Y. Research on the relationship between mishap risk and time margin for control: A case study for carrier landing of aircraft. Cogn. Technol. Work 2014, 16, 259–270. [Google Scholar] [CrossRef]
- Petovello, M.G.; O’Keefe, K.; Lachapelle, G.; Cannon, M.E. Measuring aircraft carrier flexure in support of autonomous aircraft landings. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 523–535. [Google Scholar] [CrossRef]
- Chen, C.; Tan, W.Q.; Li, H.X.; Qu, X.J. A fuzzy human pilot model of longitudinal control for carrier landing task. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 453–466. [Google Scholar] [CrossRef]
- Urnes, J.M.; Hess, R.K. Development of the f/a-18a automatic carrier landing system. J. Guid. Control Dyn. 2012, 8, 289–295. [Google Scholar] [CrossRef]
- Ryan, J.C.; Banerjee, A.G.; Cummings, M.L.; Roy, N. Comparing the performance of expert user heuristics and an integer linear program in aircraft carrier deck operations. IEEE Trans. Cybern. 2014, 44, 761–773. [Google Scholar] [CrossRef] [PubMed]
- Chewning, I.M.; Moretto, S.J. Advances in aircraft carrier life cycle cost analysis for acquisition and ownership decision-making. Nav. Eng. J. 2010, 112, 97–110. [Google Scholar] [CrossRef]
- Adams, K.M.; Meyers, T.J. The US navy carrier strike group as a system of systems. Int. J. Syst. Syst. Eng. 2011, 2, 91–97. [Google Scholar] [CrossRef]
- Monostori, L. AI and machine learning techniques for managing complexity, changes and uncertainties in manufacturing. Eng. Appl. Artif. Intell. 2003, 16, 277–291. [Google Scholar] [CrossRef]
- Tan, K.C.; Lee, L.H.; Ou, K. Artificial intelligence heuristics in solving vehicle routing problems with time window constraints. Eng. Appl. Artif. Intell. 2001, 14, 825–837. [Google Scholar] [CrossRef]
- Taibi, A.; Atmani, B. Combining Fuzzy AHP with GIS and Decision Rules for Industrial Site Selection. Int. J. Interact. Multimed. Artif. Intell. 2017, 4, 60–69. [Google Scholar] [CrossRef]
- Farhane, N.; Boumhidi, I.; Boumhidi, J. Smart algorithms to control a variable speed wind turbine. Int. J. Interact. Multimed. Artif. Intell. 2017, 4, 88–95. [Google Scholar] [CrossRef]
- Dai, Y.; Tian, J. An analysis method of landing safety based on Rough Set Theory. In Proceedings of the IEEE Reliability Maintainability Symposium, Reno, NV, USA, 23–26 January 2012; pp. 1–6. [Google Scholar]
- Richards, R.A. Application of multiple artificial intelligence techniques for an aircraft carrier landing decision support tool. In Proceedings of the IEEE International Conference on Fuzzy Systems, Honolulu, HI, USA, 12–17 May 2002; Volume 1, pp. 7–11. [Google Scholar]
- Song, Y.; Demirdjian, D.; Davis, R. Tracking body and hands for gesture recognition: NATOPS aircraft handling signals database. In Proceedings of the IEEE International Conference on Automatic Face & Gesture Recognition and Workshops, Santa Barbara, CA, USA, 21–25 March 2011; pp. 500–506. [Google Scholar]
- Ming, S. Modeling landing signal officer for carrier approach. J. Beijing Univ Aeronaut. Astronaut. 2006, 32, 135–138. [Google Scholar]
- Qu, X.; Cui, H. Variable strategy pilot model of carrier landing approach. J. Beijing Univ Aeronaut. Astronaut. 2003, 29, 993–997. [Google Scholar]
- Aristeidis, A.; Theoklis, N.; Pericles, P. Multi-Objective Climb Path Optimization for Aircraft/Engine Integration Using Particle Swarm Optimization. Appl. Sci. 2017, 7, 469. [Google Scholar]
- Douglas, M. NATOPS Flight Manual Navy Model F/A-18E/F 165533 and Up Aircraft. Nav. Air Syst. Command. 2001, 8, 1–20. [Google Scholar]
- Rudowsky, T.; Cook, S.; Hynes, M.; Heffley, R.; Luter, M.; Lawrence, T. Review of the Carrier Approach Criteria for Carrier-Based Aircraft–Phase I: Final Report; Naval Air Warfare Center Aircraft Division: Patuxent River, MD, USA, 2002. [Google Scholar]
- Shem, A.G.; Mazzuchi, T.A.; Sarkani, S. Addressing uncertainty in uav navigation decision-making. IEEE Trans. Aerosp. Electron. Syst. 2018, 44, 295–313. [Google Scholar] [CrossRef]
- Cho, H.C.; Lee, D.; Ju, H.; Park, H.C.; Kim, H.Y.; Kang, K. Fire damage assessment of reinforced concrete structures using fuzzy theory. Appl. Sci. 2017, 7, 518. [Google Scholar] [CrossRef]
- Xu, Z. Approaches to multiple attribute group decision making based on intuitionistic fuzzy power aggregation operators. Knowl.-Based Syst. 2011, 24, 749–760. [Google Scholar] [CrossRef]
- Chen, M.; Wan, Z.; Chen, X. New min-max approach to optimal choice of the weights in multi-criteria group decision-making problems. Appl. Sci. 2015, 5, 998–1015. [Google Scholar] [CrossRef]
- Cheng, J.; Zhang, Y.; Feng, Y.; Liu, Z.; Tan, J. Structural optimization of a high-speed press considering multi-source uncertainties based on a new heterogeneous topsis. Appl. Sci. 2018, 8, 126. [Google Scholar] [CrossRef]
- Wang, T.C.; Chang, T.H. Application of TOPSIS in evaluating initial training aircraft under a fuzzy environment. Expert Syst. Appl. 2007, 33, 870–880. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Mardani, A.; Turskis, Z.; Jusoh, A.; Md. Nor, K. Development of topsis method to solve complicated decision-making problems: An overview on developments from 2000 to 2015. Int. J. Inf. Technol. Decis Mak. 2016, 15, 645–682. [Google Scholar]
- Bashir, Z.; Rashid, T.; Wątróbski, J.; Sałabun, W.; Malik, A. Hesitant probabilistic multiplicative preference relations in group decision making. Appl. Sci. 2018, 8, 398. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Good | >3000 feet | >5 km | Medium | Good |
| Bad | 1000–3000 feet | >5 km | Good | Good |
| Terrible | <1000 feet | <5 km | Good | Good |
| Indifferent | Indifferent | Indifferent | Bad | Bad |
| Linguistic Variable | No | Low | Medium | High | Very High |
|---|---|---|---|---|---|
| Expression | NO | LO | ME | HI | VH |
| Linguistic Variable | Too Poor | A Slightly Poor | Normal | Good | Very Good |
|---|---|---|---|---|---|
| Expression | TP | SP | NO | GO | VG |
| Items | Linguistic Variables and Expressions | ||||
|---|---|---|---|---|---|
| Performance ratings | NO | LO | ME | HI | VH |
| Environment evaluations | TP | SP | NO | GO | VG |
| Triangular membership function | [0, 0, 0.1] | [0.1, 0.3, 0.5] | [0.3, 0.5, 0.7] | [0.5, 0.7, 0.9] | [0.9, 1, 1] |
| Serial Number of Simulation | Environments |
|---|---|
| i | The weather, height of clouds and visibility are good while the performance of aircraft and air traffic condition are normal. |
| ii | The weather, height of clouds and visibility are not so good while the performance of aircraft and air traffic condition are good. |
| iii | The weather, height of clouds and visibility are bad while the performance of aircraft and air traffic condition are good. |
| iv | The weather, height of clouds and visibility are normal while the performance of aircraft and air traffic condition are bad. |
| Contributing Factors | ||||||
|---|---|---|---|---|---|---|
| Simulation i | Pilot | VG | VG | VG | NO | NO |
| LCO | GO | GO | GO | GO | GO | |
| Simulation ii | Pilot | GO | GO | GO | GO | GO |
| LCO | SP | SP | NO | GO | VG | |
| Simulation iii | Pilot | TP | TP | TP | GO | GO |
| LCO | TP | TP | TP | GO | VG | |
| Simulation iv | Pilot | SP | SP | NO | NO | TP |
| LCO | TP | NO | SP | NO | TP | |
| Weight of decision maker | Pilot LCO | |||||
| Case | l1 | l2 | l3 | l4 |
|---|---|---|---|---|
| i | 2 | 7 | 1 | 0 |
| ii | 0 | 8 | 2 | 0 |
| iii | 0 | 1 | 4 | 5 |
| iv | 0 | 0 | 1 | 9 |
| Alternative Route | ||||
|---|---|---|---|---|
| Closeness coefficient | [0, 0.82, 161.06] | [0, 0.80, 159.28] | [0, 0.51, 107.62] | [0, 0.20, 55.49] |
| Mean value | 40.67 | 40.22 | 27.16 | 13.97 |
| Rank | ||||
| The optimal landing path | ||||
| Alternative Route | ||||
|---|---|---|---|---|
| Closeness coefficient | [0, 0.74, 87.00] | [0, 0.80, 88.11] | [0, 0.58, 61.20] | [0, 0.20, 31.48] |
| Mean value | 22.12 | 22.43 | 15.59 | 7.97 |
| Rank | ||||
| The optimal landing path | ||||
| Alternative Route | ||||
|---|---|---|---|---|
| Closeness coefficient | [0, 0.51, 5.24] | [0, 0.80, 5.89] | [0, 0.80, 6.41] | [0, 0.20, 2.84] |
| Mean value | 1.57 | 1.87 | 2.00 | 0.81 |
| Rank | ||||
| The optimal landing path | ||||
| Alternative Route | ||||
|---|---|---|---|---|
| Closeness coefficient | [0, 0.20, 6.47] | [0, 0.21, 6.50] | [0, 0.47, 7.23] | [0, 0.80, 6.79] |
| Mean value | 1.72 | 1.73 | 2.04 | 2.09 |
| Rank | ||||
| The optimal landing path | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, X.; Wu, Y.; Song, J.; Yuan, P. A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier. Appl. Sci. 2018, 8, 779. https://doi.org/10.3390/app8050779
Su X, Wu Y, Song J, Yuan P. A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier. Applied Sciences. 2018; 8(5):779. https://doi.org/10.3390/app8050779
Chicago/Turabian StyleSu, Xichao, Yu Wu, Jingyu Song, and Peilong Yuan. 2018. "A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier" Applied Sciences 8, no. 5: 779. https://doi.org/10.3390/app8050779
APA StyleSu, X., Wu, Y., Song, J., & Yuan, P. (2018). A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier. Applied Sciences, 8(5), 779. https://doi.org/10.3390/app8050779