An Optimized Protection Coordination Scheme for the Optimal Coordination of Overcurrent Relays Using a Nature-Inspired Root Tree Algorithm



 , , and
, , and
Abstract
:1. Introduction
2. Problem Formulation of the Overcurrent Relay
Constraints
3. Root Tree Optimization Algorithm
3.1. The Rate of the Root (Rn) Nearest to the Water
3.2. The Rate of the Continuous Root (Rc) in Its District
3.3. Random Root Rate (Rr)
3.4. The Step Root Tree Algorithm
- Step 1:
- In this step, the initial generation is created randomly and is composed of N members with the variable limits in the research location with induce numerical values of Rn, Rr, and Rc rates.
- Step 2:
- In the second step, all population members are measured based on their respective wd for the maximum and minimum objective function:
- Step 3:
- The new population is created and replacement of the member is done according to the wetness ratio of Rn, Rr, and Rc. Equations (10)–(12) are used for a candidate having the smallest value until the one with the same wetness ratio is achieved.
- Step 4:
- In this step, the meeting criteria are satisfied to display an optimal result with the best fitness value. Otherwise there is a return to Step 2.
3.5. Implementation of the RTO Algorithm for the OCR Coordination Problem
- Step 1:
- Define the input parameter that includes TMS, the maximum number of iterations, population size, and the adjustable parameter (i.e., different rate values of Rn, Rr, and Rc).
- Step 2:
- In this step, the population is initially generated with respect to the relay bounding. These individuals must be a feasible candidate solution that satisfies the relay operating constraints.
- Step 3:
- Measure the fitness value of each candidate in the population, with the help of Equation (10). Additionally, an evaluation of wetness ratio is done in this step for each candidate.
- Step 4:
- In this step, the comparison is done between the best fitness values of candidates of the individual population.
- Step 5:
- Computation of new candidates can be done using Equations (10)–(12).where Xbi,r is the individual that is randomly selected from the current population, n is the population size, Xbi,max, and Xbi,max are upper and lower parameter limits, respectively, and i is the number of iterations.
- Step 6:
- If the number of iterations reaches the maximum, then go to Step 7. Otherwise, go to Step 3.
- Step 7:
- The candidates that generate the latest is the optimal TMS of each relay with the minimum total operating time that is the objective function.
| Algorithm 1. The structure of the new rooted tree algorithm [35]. |
| Algorithm RTO Begin // Initialization: Set the rates Rn, Rr and Rc parameters Give the maximum number of iterations: MaxIte, and the population scale: the RTO size Set iteration counter it = 1 Generate the initial population X(1) randomly within the search range of (Xmin, Xmax) // Loop Repeat Evaluate the wdi for each root // wd: Fitness, root: Individual Reorder the population according to the witness degree Identify the candidate according to the wetness place Xbest // the global best in the whole population For i = 1 to Rr the RTO size do Selected individual Xr it randomly from the current population Xi (it + 1) = Xr (it) + k1* wdi * randn * |Xmax + Xmin|/it End for For i= Rr * the RTO size +1 to (Rr+Rn) the RTO size do Xi(it+1) = Xbest + k3* wdi *randn * | Xmax + Xmin |/(it theRTOsize) End for For i = (1 − Rc) the RTO size +1 to the RTO size do Xi (it+1) = Xi (it) +k1* wdi *rand * (Xbest − Xi (it)) End for Update Xbest it = it + 1 Until for a stop criterion is not satisfied // & it <MaxIte End |
4. Results and Discussion
4.1. Case Study 1
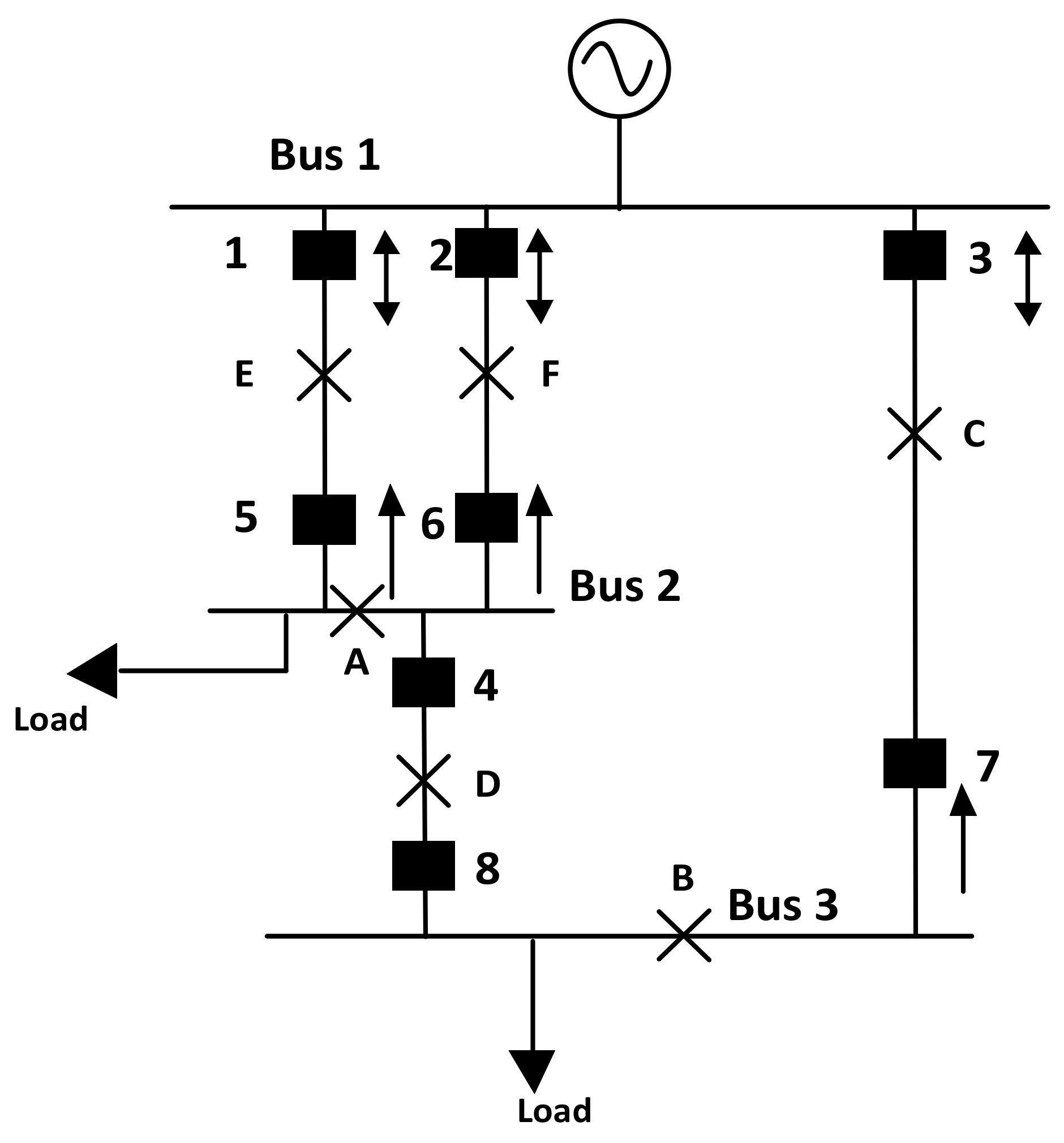
4.1.1. Mathematical Modelling of the Problem Formulation
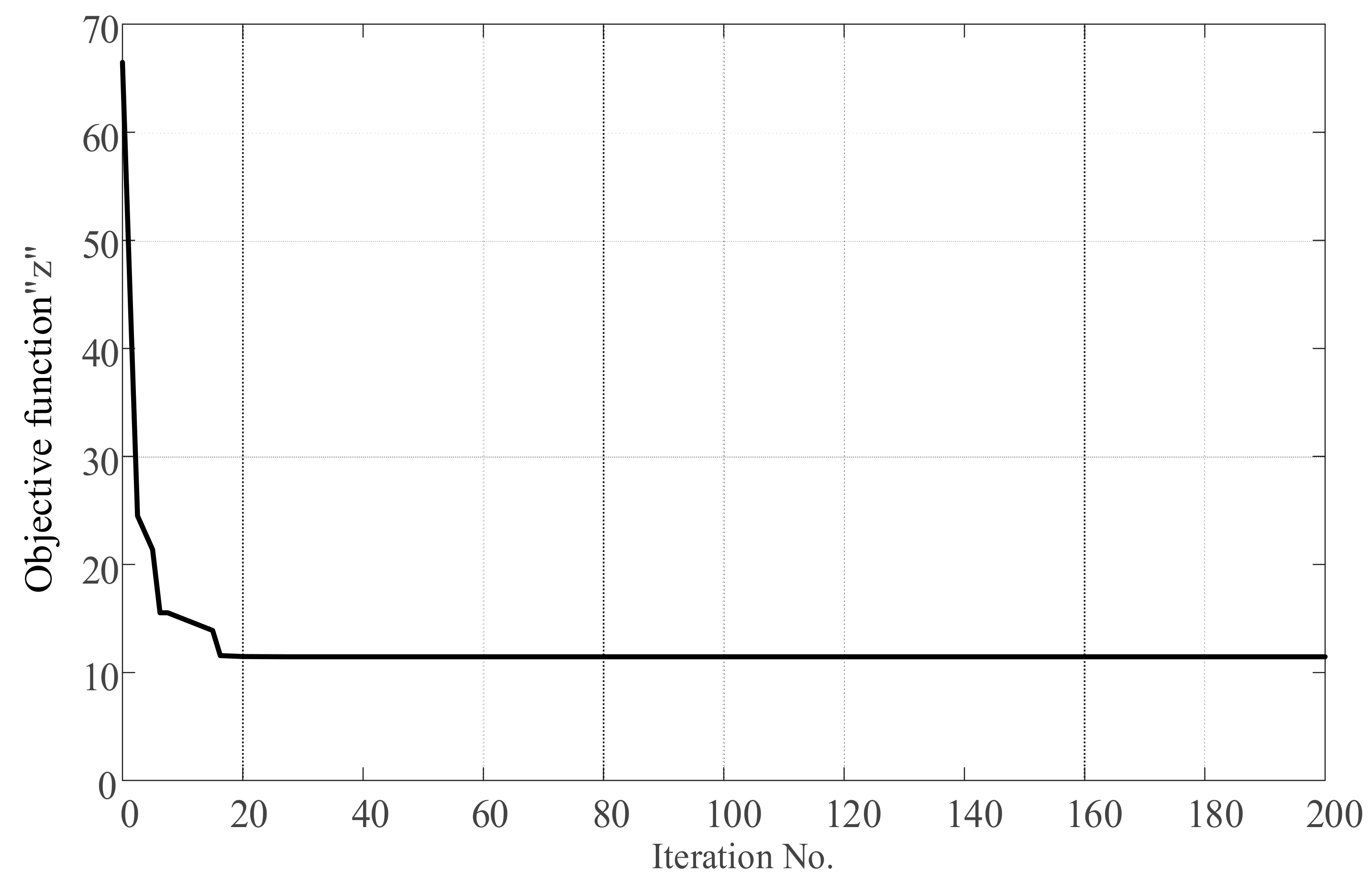
4.1.2. Application of RTO
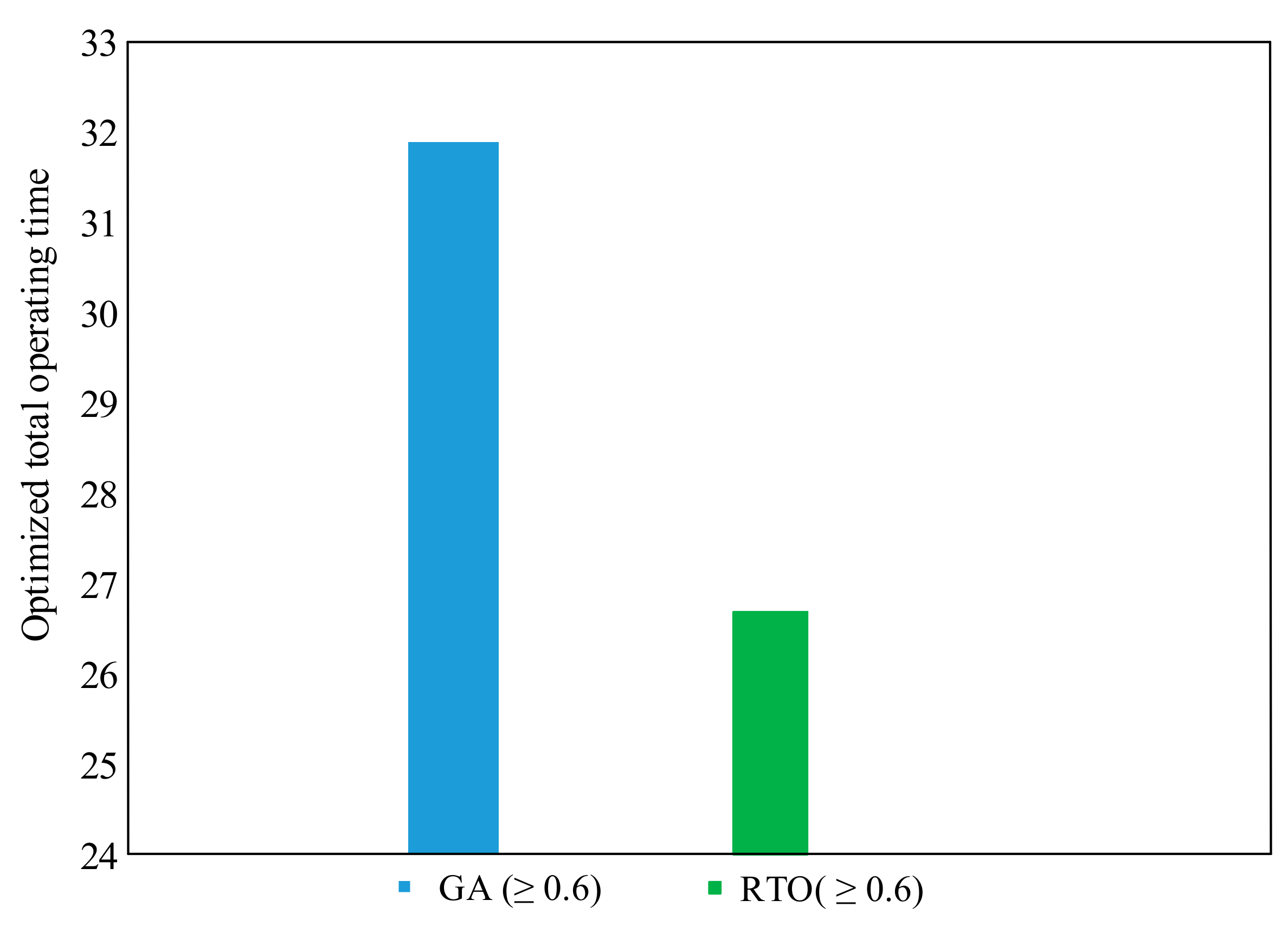
4.1.3. Comparison of RTO with the GA Algorithm
4.2. Case Study 2
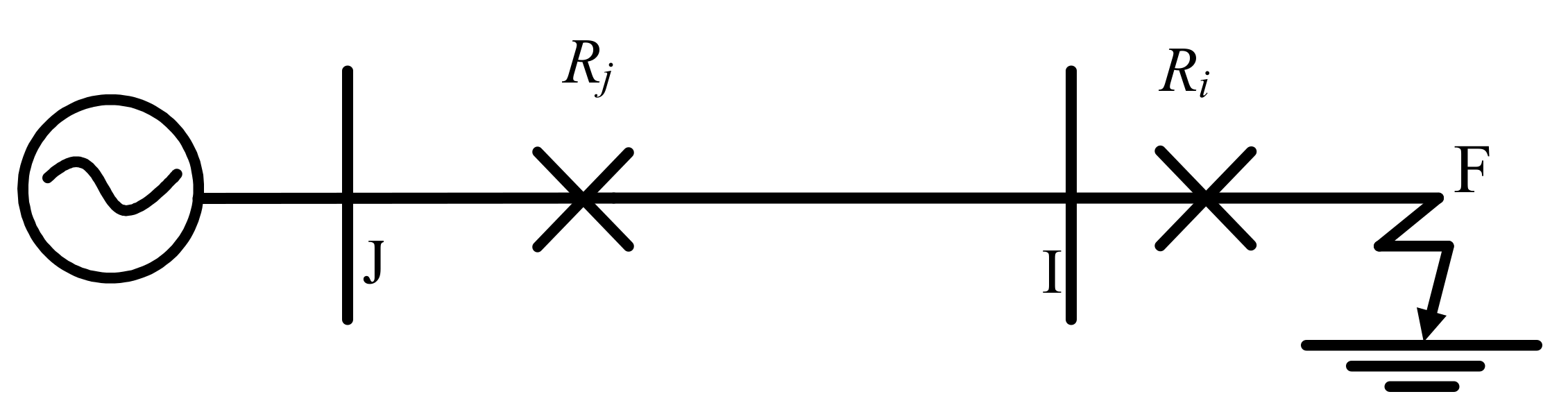
4.2.1. Mathematical Modelling of the Problem Formulation
4.2.2. Application of RTO
4.2.3. Comparison of RTO with Other Algorithms
4.3. Case Study 3
4.3.1. Mathematical Modelling of the Problem Formulation
4.3.2. Application of RTO
4.3.3. Comparison of RTO with the Simplex Method
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Urdaneta, A.J.; Nadira, R.; Jimenez, L.G.P. Optimal coordination of directional overcurrent relays in interconnected power systems. IEEE Trans. Power Deliv. 1988, 3, 903–911. [Google Scholar] [CrossRef]
- Birla, D.; Maheshwari, R.P.; Gupta, H.O.; Deep, K.; Thakur, M. Application of random search technique in directional overcurrent relay coordination. Int. J. Emerg. Electr. Power Syst. 2006, 7. [Google Scholar] [CrossRef]
- Ehrenberger, J.; Švec, J. Directional Overcurrent Relays Coordination Problems in Distributed Generation Systems. Energies 2017, 10, 1452. [Google Scholar] [CrossRef]
- Ates, Y.; Boynuegri, A.; Uzunoglu, M.; Nadar, A.; Yumurtacı, R.; Erdinc, O.; Paterakis, N.; Catalão, J. Adaptive protection scheme for a distribution system considering grid-connected and islanded modes of operation. Energies 2016, 9, 378. [Google Scholar] [CrossRef]
- Núñez-Mata, O.; Palma-Behnke, R.; Valencia, F.; Jiménez-Estévez, P.M.G. Adaptive Protection System for Microgrids Based on a Robust Optimization Strategy. Energies 2018, 11, 308. [Google Scholar] [CrossRef]
- Elrafie, H.B.; Irving, M.R. Linear programming for directional overcurrent relay coordination in interconnected power systems with constraint relaxation. Electr. Power Syst. Res. 1993, 27, 209–216. [Google Scholar] [CrossRef]
- Aghdam, T.S.; Hossein, K.K.; Hatem, Z. Optimal Coordination of Double-Inverse Overcurrent Relays for Stable Operation of DGs. IEEE Trans. Ind. Inform. 2018. [Google Scholar] [CrossRef]
- Aghdam, T.S.; Karegar, H.K.; Zeineldin, H.H. Transient Stability Constrained Protection Coordination for Distribution Systems with DG. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Ojaghi, M.; Mohammadi, V. Use of Clustering to Reduce the Number of Different Setting Groups for Adaptive Coordination of Overcurrent Relays. IEEE Trans. Power Deliv. 2018, 33, 1204–1212. [Google Scholar] [CrossRef]
- Braga, A.S.; Saraiva, J.T. Coordination of overcurrent directional relays in meshed networks using the Simplex method. In Proceedings of the 8th Mediterranean Electrotechnical Conference on Industrial Applications in Power Systems, Computer Science and Telecommunications (MELECON’96), Bari, Italy, 16 May 1996; Volume 3. [Google Scholar]
- Abyaneh, H.A.; Keyhani, R. Optimal co-ordination of overcurrent relays in power system by dual simplex method. In Proceedings of the Australasian Universities Power Engineering Conference (Aupec’95), Nedlands, Australia, 27–29 September 1995; Volume 3. [Google Scholar]
- Abdelaziz, A.Y.; Talaat, H.E.A.; Nosseir, A.I.; Hajjar, A.A. An adaptive protection scheme for optimal coordination of overcurrent relays. Electr. Power Syst. Res. 2002, 61, 1–9. [Google Scholar] [CrossRef]
- Laway, N.A.; Gupta, H.O. A method for adaptive coordination of overcurrent relays in an interconnected power system. In Proceedings of the 1993 Fifth International Conference on Developments in Power System Protection, York, UK, 30 March–2 April 1993. [Google Scholar]
- Sulaiman, M.; Waseem; Muhammad, S.; Khan, A. Improved Solutions for the Optimal Coordination of DOCRs Using Firefly Algorithm. Complexity 2018, 2018, 7039790. [Google Scholar] [CrossRef]
- Mansour, M.M.; Mekhamer, S.F.; El-Kharbawe, N. A modified particle swarm optimizer for the coordination of directional overcurrent relays. IEEE Trans. Power Deliv. 2007, 22, 1400–1410. [Google Scholar] [CrossRef]
- Zeineldin, H.H.; El-Saadany, E.F.; Salama, M.M.A. Optimal coordination of overcurrent relays using a modified particle swarm optimization. Electr. Power Syst. Res. 2006, 76, 988–995. [Google Scholar] [CrossRef]
- Razavi, F.; Abyaneh, H.A.; Al-Dabbagh, M.; Mohammadi, R.; Torkaman, H. A new comprehensive genetic algorithm method for optimal overcurrent relays coordination. Electr. Power Syst. Res. 2008, 78, 713–720. [Google Scholar] [CrossRef]
- Kim, C.H.; Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Rhee, S.B. Gray Wolf Optimizer for the Optimal Coordination of Directional Overcurrent Relay. J. Electr. Eng. Technol. 2018, 13, 1043–1051. [Google Scholar]
- Thangaraj, R.; Pant, M.; Deep, K. Optimal coordination of over-current relays using modified differential evolution algorithms. Eng. Appl. Artif. Intell. 2010, 23, 820–829. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H.; Zellagui, M.; Abido, M.A. Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization algorithm. Appl. Soft Comput. 2017, 54, 267–283. [Google Scholar] [CrossRef]
- Alipour, M.; Teimourzadeh, S.; Seyedi, H. Improved group search optimization algorithm for coordination of directional overcurrent relays. Swarm Evolut. Comput. 2015, 23, 40–49. [Google Scholar] [CrossRef]
- Brown, K.; Tyle, N. An expert system for over current protective device coordination. McGraw Edison power system division. In Proceedings of the IEEE Rural Electric Power System Conference, Charleston, SC, USA, April 1986; pp. 20–22. [Google Scholar]
- Lee, S.J.; Yoon, S.H.; Yoon, M.C.; Jang, J.K. An expert system for protective relay setting of transmission systems. IEEE Trans. Power Deliv. 1990, 5, 1202–1208. [Google Scholar]
- Decher, G.; Hong, J.-D. Buildup of ultrathin multilayer films by a self-assembly process, 1 consecutive adsorption of anionic and cationic bipolar amphiphiles on charged surfaces. Macromol. Symp. 1991, 46, 321–327. [Google Scholar] [CrossRef]
- Wang, J.; Trecat, J. RSVIES—A relay setting value identification expert system. Electr. Power Syst. Res. 1996, 37, 153–158. [Google Scholar] [CrossRef]
- Abyane, H.A.; Faez, K.; Karegar, H.K. A new method for overcurrent relay (O/C) using neural network and fuzzy logic. In Proceedings of the IEEE Region 10 Annual Conference, Speech and Image Technologies for Computing and Telecommunications (TENCON’97), Brisbane, Australia, 4 December 1997; Volume 1. [Google Scholar]
- Yu, J.; Kim, C.H.; Wadood, A.; Khurshiad, T.; Rhee, S.B. A Novel Multi-Population Based Chaotic JAYA Algorithm with Application in Solving Economic Load Dispatch Problems. Energies 2018, 11, 1946. [Google Scholar] [CrossRef]
- Farkoush, S.G.; Khurshiad, T.; Wadood, A.; Kim, C.-H.; Kharal, K.H.; Kim, K.-H.; Cho, N.; Rhee, S.-B. Investigation and Optimization of Grounding Grid Based on Lightning Response by Using ATP-EMTP and Genetic Algorithm. Complexity 2018, 2018, 8261413. [Google Scholar] [CrossRef]
- Park, J.H.; Yu, J.S.; Geem, Z.W. Genetic Algorithm-based Optimal Investment Scheduling for Public Rental Housing Projects in South Korea. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 135–145. [Google Scholar] [CrossRef]
- Moon, Y.Y.; Geem, Z.W.; Han, G.-T. Vanishing point detection for self-driving car using harmony search algorithm. Swarm Evolut. Comput. 2018, 41, 111–119. [Google Scholar] [CrossRef]
- Geem, Z.W.; Yoon, Y. Harmony search optimization of renewable energy charging with energy storage system. Int. J. Electr. Power Energy Syst. 2017, 86, 120–126. [Google Scholar] [CrossRef]
- Wadood, A.; Kim, C.; Loon, T.K.; Hassan, K.; Farkoush, S.G.; Rhee, S.-B. Optimal Coordination of Directional Overcurrent Relays using New Rooted Tree Optimization Algorithm. In Proceedings of the International Conference on Information, System and Convergence Applications (ICISCA/ICW 2018), Bangkok, Thailand, 31 January–2 February 2018. [Google Scholar]
- Chattopadhyay, B.; Sachdev, M.S.; Sidhu, T.S. An on-line relay coordination algorithm for adaptive protection using linear programming technique. IEEE Trans. Power Deliv. 1996, 11, 165–173. [Google Scholar] [CrossRef]
- Wadood, A.; Kim, C.-H.; Farkoush, S.G.; Rhee, S.B. An Adaptive Protective Coordination Scheme for Distribution System Using Digital Overcurrent Relays. Korean Inst. Illum. Electr. Install. Eng. 2017, 5, 53. [Google Scholar]
- Labbi, Y.; Attous, D.B.; Gabbar, H.A.; Mahdad, B.; Zidan, A. A new rooted tree optimization algorithm for economic dispatch with valve-point effect. Int. J. Electr. Power Energy Syst. 2016, 79, 298–311. [Google Scholar] [CrossRef]
- Bedekar, P.P.; Bhide, S.R.; Kale, V.S. Optimum coordination of overcurrent relays in distribution system using genetic algorithm. In Proceedings of the International Conference on Power Systems (ICPS’09), Kharagpur, India, 27–29 December 2009. [Google Scholar]
- Bedekar, P.P.; Bhide, S.R. Optimum coordination of overcurrent relay timing using continuous genetic algorithm. Expert Syst. Appl. 2011, 38, 11286–11292. [Google Scholar] [CrossRef]
- Gokhale, S.S.; Kale, V.S. An application of a tent map initiated Chaotic Firefly algorithm for optimal overcurrent relay coordination. Int. J. Electr. Power Energy Syst. 2016, 78, 336–342. [Google Scholar] [CrossRef]
- Bedekar, P.P.; Bhide, S.R.; Kale, V.S. Optimum coordination of overcurrent relay timing using simplex method. Electr. Power Compon. Syst. 2010, 38, 1175–1193. [Google Scholar] [CrossRef]
- Wadood, A.; Kim, C.H.; Khurshiad, T.; Farkoush, S.G.; Rhee, S.B. Application of a Continuous Particle Swarm Optimization (CPSO) for the Optimal Coordination of Overcurrent Relays Considering a Penalty Method. Energies 2018, 11, 869. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Point | T. Fault Current | Primary Relay | Backup Relay |
|---|---|---|---|
| A | 2330 | 1, 2, 8 | -, -, 3 |
| B | 1200 | 3, 4 | -, 1, 2 |
| C | 1400 | 3, 7 | -, 4 |
| D | 1400 | 4, 8 | 1, 2, 3 |
| E | 2800 | 1, 5 | -, 8 |
| F | 2800 | 2, 6 | -, 8 |
| Fault Point | Relay | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| A | Irelay | 10 | 10 | 3.3 | - | - | - | - | 3.3 |
| 2.971 | 2.971 | 5.749 | - | - | - | 5.749 | |||
| B | Irelay | 3.45 | 3.45 | 5.1 | 6.9 | - | - | - | - |
| 5.584 | 5.584 | 4.227 | 3.551 | - | - | - | - | ||
| C | Irelay | 2 | 2 | 10 | 4 | - | - | 4 | - |
| 10.035 | 10.035 | 2.971 | 4.9804 | - | - | 4.9804 | - | ||
| D | Irelay | 5 | 5 | 4 | 10 | - | - | - | 4 |
| 4.281 | 4.281 | 4.9804 | 2.971 | - | - | - | 4.9804 | ||
| E | Irelay | 20 | 6 | 2 | - | 8 | - | - | 2 |
| 2.267 | 3.837 | 10.035 | - | 3.297 | - | - | 10.035 | ||
| F | Irelay | 6 | 20 | 2 | - | - | 8 | - | 2 |
| 3.837 | 2.267 | 10.035 | - | - | 3.297 | - | 10.035 | ||
| TMS | GA [36] (≥0.6) | RTO (≥0.6) |
|---|---|---|
| TMS 1 | 0.2975 | 0.2521 |
| TMS 2 | 0.2975 | 0.2521 |
| TMS 3 | 0.2270 | 0.2000 |
| TMS 4 | 0.1730 | 0.1510 |
| TMS 5 | 0.0607 | 0.0303 |
| TMS 6 | 0.0607 | 0.0303 |
| TMS 7 | 0.0402 | 0.0250 |
| TMS 8 | 0.1129 | 0.0800 |
| Top (z) | 31.883 | 26.681 |
| Line | Impedance (Ω) |
|---|---|
| 1 and 2 | 0.08 +j1 |
| 2 and 3 | 0.08 + j1 |
| 1 and 3 | 0.16 + j2 |
| Fault Point | Primary Relay | Backup Relay |
|---|---|---|
| A | 1, 2 | -, 4 |
| B | 3, 4 | 1, 5 |
| C | 5, 6 | -, 3 |
| D | 3, 5 | 1, - |
| Relay | CT Ratio | Plug Setting |
|---|---|---|
| 1 | 1000/1 | 1 |
| 2 | 300/1 | 1 |
| 3 | 1000/1 | 1 |
| 4 | 600/1 | 1 |
| 5 | 600/1 | 1 |
| 6 | 600/1 | 1 |
| Fault Point | Relay | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| A | Irelay | 6.579 | 3.13 | - | 1.565 | 1.565 | - |
| 3.646 | 6.065 | - | 15.55 | 15.55 | - | ||
| B | Irelay | 2.193 | - | 2.193 | 2.193 | 2.193 | - |
| 8.844 | - | 8.844 | 8.844 | 8.844 | - | ||
| C | Irelay | 1.096 | - | 1.096 | - | 5.482 | 1.827 |
| 75.91 | - | 75.91 | - | 4.044 | 11.539 | ||
| D | Irelay | 1.644 | - | 1.644 | - | 2.741 | - |
| 13.99 | - | 13.99 | - | 6.872 | - | ||
| TMS | CGA [37] (≥0.3) | FA [38] (≥0.3) | CFA [38] (≥0.3) | CPSO [40] (≥ 0.3) | RTO (≥0.3) |
|---|---|---|---|---|---|
| TMS 1 | 0.0765 | 0.027 | 0.027 | 0.0589 | 0.0590 |
| TMS 2 | 0.034 | 0.130 | 0.221 | 0.0250 | 0.0250 |
| TMS 3 | 0.0339 | 0.025 | 0.025 | 0.0250 | 0.0250 |
| TMS 4 | 0.036 | 0.025 | 0.025 | 0.0290 | 0.0290 |
| TMS 5 | 0.0711 | 0.025 | 0.029 | 0.0630 | 0.0650 |
| TMS 6 | 0.0294 | 0.489 | 0.363 | 0.0250 | 0.0250 |
| Top (z) | 15.88 | 16.25 | 14.39 | 11.87 | 11.93 |
| Relay | CT Ratio | Plug Setting |
|---|---|---|
| 1 | 1000/1 | 0.8 |
| 2 | 1000/1 | 0.8 |
| 3 | 1000/1 | 0.8 |
| 4 | 1000/1 | 0.8 |
| 5 | 1000/1 | 0.8 |
| 6 | 1000/1 | 0.8 |
| 7 | 500/1 | 0.5 |
| Fault Point | Primary Relay | Backup Relay | T. Fault Current (A) |
|---|---|---|---|
| A | 1 | - | 6579 |
| 4 | 2 | 939 | |
| B | 3 | 1 | 2193 |
| 4 | 5 | 1315.5 | |
| C | 5 | - | 3289.5 |
| 6 | 3 | 1096.5 | |
| D | 7 | 3 | 1315.8 through relays 3 and 5 |
| - | 5 | 2631.6 through relay 7 |
| Fault Point | Relay | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
| A | Irelay | 8.223 | 1.1737 | - | 2.347 | - | - | - |
| 3.252 | 43.776 | - | 8.159 | - | - | |||
| B | Irelay | 2.741 | - | 5.482 | 3.288 | 1.644 | - | - |
| 6.872 | - | 4.0444 | 5.811 | 14.01 | - | - | ||
| C | Irelay | - | - | 2.741 | - | 4.111 | 1.370 | - |
| - | - | 6.872 | - | 4.881 | 22.165 | - | ||
| D | Irelay | - | - | 3.289 | - | 3.289 | - | 5.263 |
| - | - | 5.809 | - | 5.809 | - | 4.145 | ||
| TMS | SM [39] (≥0.2) | RTO (≥0.2) |
|---|---|---|
| TMS 1 | 0.23829 | 0.0852 |
| TMS 2 | 0.12 | 0.0250 |
| TMS 3 | 0.36036 | 0.0953 |
| TMS 4 | 0.0319 | 0.0250 |
| TMS 5 | 0.02773 | 0.0250 |
| TMS 6 | 0.025 | 0.0250 |
| TMS 7 | 0.08 | 0.0250 |
| Top (z) | 15.7068 | 5.1756 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wadood, A.; Gholami Farkoush, S.; Khurshaid, T.; Kim, C.-H.; Yu, J.; Geem, Z.W.; Rhee, S.-B. An Optimized Protection Coordination Scheme for the Optimal Coordination of Overcurrent Relays Using a Nature-Inspired Root Tree Algorithm. Appl. Sci. 2018, 8, 1664. https://doi.org/10.3390/app8091664
Wadood A, Gholami Farkoush S, Khurshaid T, Kim C-H, Yu J, Geem ZW, Rhee S-B. An Optimized Protection Coordination Scheme for the Optimal Coordination of Overcurrent Relays Using a Nature-Inspired Root Tree Algorithm. Applied Sciences. 2018; 8(9):1664. https://doi.org/10.3390/app8091664
Chicago/Turabian StyleWadood, Abdul, Saeid Gholami Farkoush, Tahir Khurshaid, Chang-Hwan Kim, Jiangtao Yu, Zong Woo Geem, and Sang-Bong Rhee. 2018. "An Optimized Protection Coordination Scheme for the Optimal Coordination of Overcurrent Relays Using a Nature-Inspired Root Tree Algorithm" Applied Sciences 8, no. 9: 1664. https://doi.org/10.3390/app8091664