In this section, we present some case studies of backhaul topology design using graph optimization. To support invariants computation and graph optimization, we selected the AGX (Available at
https://www.gerad.ca/Gilles.Caporossi/agx) software in [
32,
35]. Initially, we examined tree topologies, which are still very popular in access networks due to their low cost. Although they do not offer survivability, we used this simple architecture to illustrate how graph optimization can lead to better topological solutions for meeting C-RAN future network requirements. We then moved on to investigate ring-based networks, which offer survivability but not resilience, showing how graph optimization can improve them. Finally, a real-world network topology was studied to show the practical implications of graph optimization in the decision making process regarding the C-RAN underlying topology design.
3.1. Non-Survivable Topologies: Trees
This first case study focused on node interconnection and latency requirements.
Table 2 collects the invariants values of the proposed topologies.
In the search for topologies for a network with 19 nodes, basic interconnection constraints and a minimal latency objective could be addressed with a classic star topology (tree graph family), as shown in
Figure 2a, which contains only 18 edges (low edge cost), has diameter 2 (low maximum latency), has average distance
(low average latency), and has Wiener index 324. Unfortunately, analysis showed that this topology is highly dependent on a central node (maximum degree is 18, and degree variance is
), whose removal stops the communication between all other nodes. Moreover, the high maximum degree brings implementation barriers.
Although a high centralized topology would bring some impacts to the network interconnectivity, for C-RAN, such centralization would be perfect for reusing the resources at data-centers. The more centralized a BBU pool is positioned, the bigger is the potential to receive offloaded workload from other RANs to be processed in the same BBU pools. It means that the operator would not have to spend too much revenue with new BBU pools by reusing the already deployed ones.
Despite the benefits that C-RAN would afford from such topology, to minimize the centralization impacts, an expert could propose the solution shown in
Figure 2b [
36]. This solution effectively reduces the maximum degree and the degree variance from 18 to 4 and from
to
, respectively, with the downside of increasing the diameter from 2 to 6, and increasing the Wiener index from 324 to 544.
Our method allows the further systematic refinement of even the expert’s solution. From the solution presented in
Figure 2b and using AGX, our approach obtains the graph shown in
Figure 2c. The optimization applied here minimizes the diameter and the average distance, subject to maximum degree less than or equal to four. The maximum degree constraint ensures that the gains originally achieved by the expert are maintained. The result of this optimization only changes one edge to reduce the diameter from 6 to 5 while keeping almost all other invariants, with the only disadvantage of slightly increasing the load on some edges (maximum edge betweenness goes from 70 to 78, and degree variance goes from
to
). Alternatively, we could consider different objective functions and constraints to improve other topological parameters. For example, if the constraint on the maximum degree is not so critical to the network design, we could use maximum degree less than or equal to five to reduce the diameter to 3. That is, our approach to topology design enables the systematic exploration of potential topologies and enumeration of major trade-offs.
3.2. From Survivable to Resilient Topologies: 2-Connected Graphs
This second case study focused on survivability requirements. Information on the invariants values of the proposed topologies can be found in
Table 3.
At first sight, the search for resilient topology solutions for a network with 14 nodes could lead to the 2-connected ring topology shown in
Figure 3a, which contains only 14 edges and has average degree 2 (low cost). However, as discussed in
Section 2, the ring is a poor solution considering latency and resilience requirements, because the diameter is high (7, in this case) and changes to 13 in case of any node removal. Moreover, given a fixed number of nodes, the ring is the 2-connected graph maximizing the Wiener index [
29]. For a ring with 14 nodes, the Wiener index is 343, and the node Wiener impact of each of its nodes is 70.
With the goal of minimizing these impacts, an expert could propose the solution shown in
Figure 3b [
37], which attempts to combine the benefits from ring and star topologies. This solution reduces the latency related invariants (the average distance, from
to
, and the diameter, from 7 to 2) and the Wiener index by adding 12 edges from each node to a central node. On the other hand, its benefits are still dependent on a single node, which is related to the high values for maximum degree (13) and degree variance (
). The maximum and minimum values for Wiener impact (130 and 0, respectively) also demonstrate the significance of removing this central node on the transmission of the other nodes and, thus, show that the solution is not resilient.
Once again our solution supports the refinement of this topology to address its faults. Starting with the solution presented in
Figure 3b and using AGX, we obtained the graph shown in
Figure 3c. Here, the optimization minimizes the Wiener impact, and the average distance, subject to a 2-connected graph of both diameter and maximum degree less than or equal to four. The number of edges is also fixed to 26, which allows a fair comparison between both solutions with respect to interconnection parameters. The maximum degree constraint is an example requirement from [
36]. Our optimized solution has few drawbacks: the average distance goes from
to
, the diameter goes from 2 to 3, and the Wiener index goes from 156 to 186. On the other hand, it has great positive impact on the maximum degree (from 13 to 4) and the degree variance (from
to
). Moreover, our method heavily improves the topology resilience as shown by the reduction on the maximum Wiener impact (from 130 to 6).
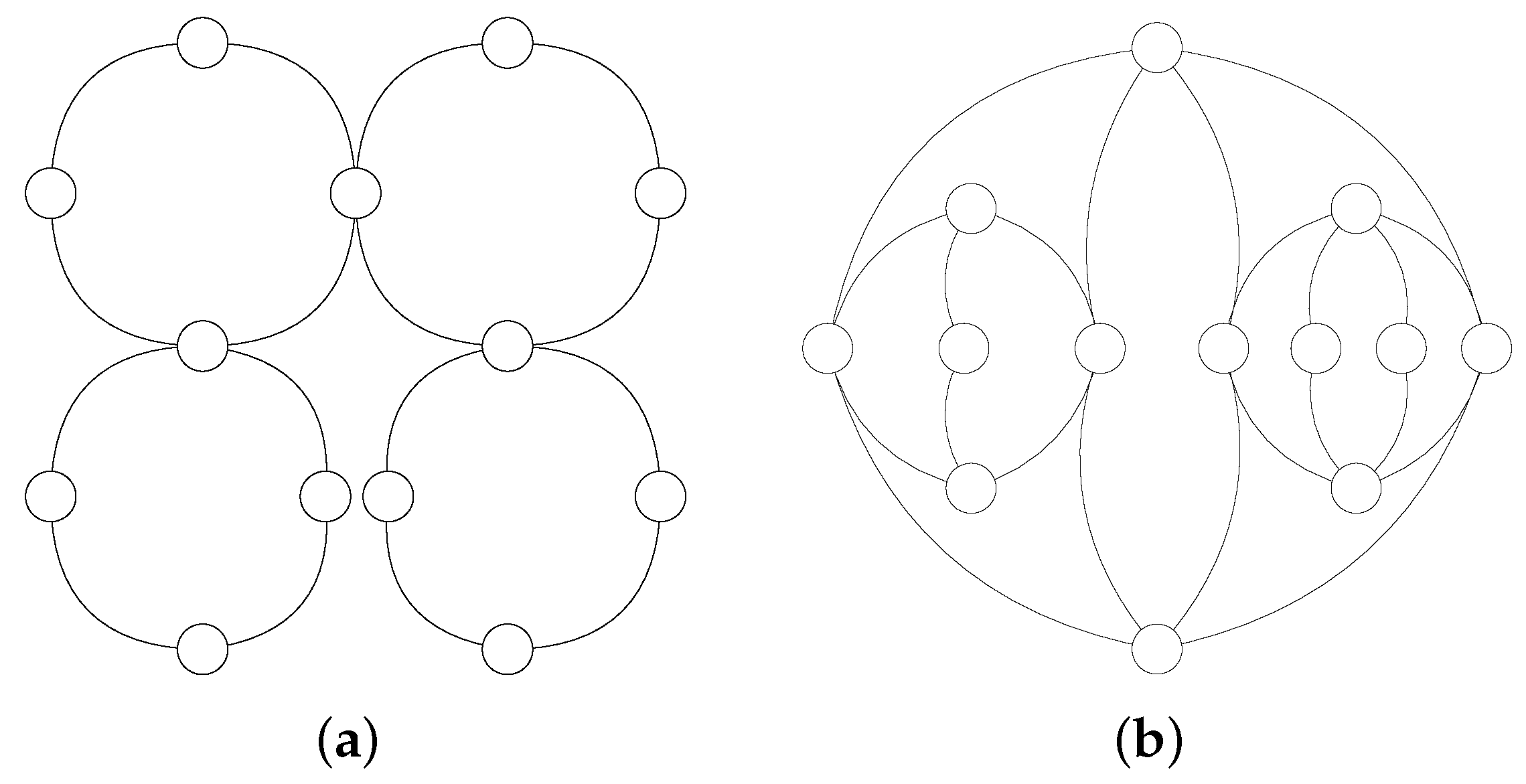
Extending the previous analysis, we investigate C-RAN topologies, which are typically composed by hierarchical ring structures [
38], as shown in
Figure 4a. This structure is not a 2-connected graph and leads to poor resilience properties, since the removal of a single node that interconnects two rings produces a disconnected graph.
We optimized the C-RAN topology presented in
Figure 4a using AGX to improve resilience, and obtained the graph shown in
Figure 4b. The graph optimization problem can be stated as: minimize the Wiener impact, and the average distance, subject to a 2-connected graph of diameter less than or equal to 6 and maximum degree less than or equal to four.
Table 4 compares the hierarchical ring topology with the optimized one, which has much better resilience properties. As the topology based on hierarchical rings is not a 2-connected graph, it is not possible to calculate its Wiener impact (i.e., some nodes have infinite Wiener impact, since some node pairs become unreachable after a single node removal). On the other hand, in our optimized topology, any node removal still produces a connected graph. Moreover, this topology minimizes the Wiener impact for our problem, and has very special resilience properties, because it is a twin graph, with working and backup paths of equal length for all nonadjacent node pairs [
39]. This can be verified by the fact that both the maximum and minimum node Wiener impact are zero, meaning that after any node removal there is still another path of equal cost that can replace a path that contains the faulty node.
The only drawback of our optimized solution is the increase of the number of edges from 16 to 22, which also affects the average degree. All other invariants are maintained or improved, including the average distance (from to ). In particular, our method heavily improves the topology resilience and provides a much more adequate topology for C-RAN requirements, which justifies the cost of adding extra edges.
3.3. From Survivable to Resilient Topologies: A Real-World Network
In C-RAN, its underlying infrastructure presents two problems: (i) massive initial investment; and (ii) ossified infrastructure. In the former, BBU pools need to be connected to RRHs using redundant optical links (e.g., ring links) that require site installation and long length links (e.g., ≥10 km) per antenna, hindering the centralization of BBU pools due to high cost. In the latter, the underlying infrastructure after installed cannot be easily repositioned needing new investments and man-working, compromising the scalability of C-RAN. Based on these problems, reusing already deployed underlying infrastructure (backhaul) enables the cut of initial investments also giving new possibilities of deployment, merging C-RAN’s underlying infrastructure with backhaul.
Although the reuse of the backhaul is crucial to the realization of C-RAN, the survivability of such hybrid underlying infrastructure may be compromised, mainly because of the different already deployed infrastructure purposes, such as interconnecting cities or providing connectivity to Internet Service Providers. Therefore, the goal of this case study is to extend our resilience analysis to a real-world backbone network in the realization of C-RAN. To this end, we optimize the Brazilian National Research and Educational Network (RNP) topology (Available at
www.pop-sc.rnp.br/servicos/conectividade), which is composed by 28 points of presence. Since the resilience analysis only makes sense in a 2-connected graph,
Figure 5 shows the representation of the resultant 25-node topology after the removal of the three nodes that are not part of any cycle. Information on the invariants values of the proposed topologies can be found in
Table 5.
An analysis of
Figure 5 shows that the highlighted nodes have high Wiener impact values (181 and 146), which tell us that the impact on the overall network resilience of removing these nodes is high. This diagnosis can drive an expert to connect extra edges in the network to reduce the impact of their disconnection. For example, in the graph of
Figure 6a, the addition of only two extra edges (highlighted in red dashed lines) to the original graph of
Figure 5 reduces the maximum Wiener impact from 181 to 69. This example shows how the analysis of node invariants can be used as an incremental and informed method for increasing network resilience in an existing network that does not support disruptive changes.
On the other hand, if the goal is to design a new topology from scratch that focuses on resilience, we could fix the original number of nodes (25) and edges (38) and try to minimize the maximum Wiener impact. With this objective function and these constraints in AGX, we were able to find the topology shown in
Figure 6b that presents a maximum Wiener impact value of 34 (against the original 181 value of the original topology). We can also check in
Table 5 that all the other analyzed invariants were improved when compared to the original topology.
To better understand the effects of minimizing the node Wiener impact on the topological parameters, a worst case analysis was performed for the same topologies analyzed in
Table 5. For that end, for each topology, the node maximizing the Wiener impact was removed from the topology, and the invariants were computed again. The results are presented in
Table 6. Notice that, whereas the diameter of the original topology has increased from 5 to 9 after the worst case node failure, the diameter of both the improved topologies has only increased from 5 to 6. Moreover, the average distance of these improved topologies increases much less (
for the topology shown in
Figure 6a and
for the one shown in
Figure 6b) than the average distance of the original topology (
). These results are graphically presented in
Figure 7. In addition, this figure shows that the diameter and the average distance invariants from the optimized topology of
Figure 6b are similar to the topology of
Figure 6a, but without the need for adding two additional edges.
When we optimize the original graph, the output is an improved node interconnection solution that better suits the defined constraints and objective functions. A final step to implement the solution in real networks is to map the nodes from the optimized solution into the original node geographical distribution. This is another problem that can also be tackled with the guidance of graph invariants. For example, a heuristics may sort the original geographical nodes by traffic load or population aspects and map them to the nodes in the optimized solution that have the greater values for some specific graph invariant (e.g., degree or Wiener impact). In addition, this heuristics has to ensure that neighbors in the optimized solution are close in terms of geographic distance to minimize the cabling costs.

 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}