Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles

1
Graduate School of Engineering, Hiroshima University, Hiroshima 739-8527, Japan
2
Department of Rehabilitation, Fukuyama Memorial Hospital, Fukuyama 721-0964, Japan
3
JSPS Research Fellow, JSPS, Tokyo 102-0083, Japan
4
Faculty of Health and Welfare, Prefectural University of Hiroshima, Hiroshima 723-0053, Japan
5
JST, PRESTO, Hiroshima 739-8527, Japan
*
Author to whom correspondence should be addressed.
Appl. Sci. 2019, 9(15), 3108; https://doi.org/10.3390/app9153108
Submission received: 30 June 2019
/
Revised: 26 July 2019
/
Accepted: 30 July 2019
/
Published: 1 August 2019
(This article belongs to the Special Issue Recent Advance and Future Trends in Rehabilitation and Nursing-Care Robots)
Abstract
:Decreased ability to control posture is correlated with the risk of falls among older individuals. In particular, reactive postural control ability response to even small perturbations is important for fall prevention of older individuals. The current study sought to design a new wearable assistive device for improving balance function by generating small perturbations using pneumatic gel muscle (PGM). Furthermore, we investigated the effects of using the proposed device for balance training. The proposed wearable balance exercise device utilized PGMs possessing various features, such as a lightweight design and the ability to generate small perturbations with a small power source. We investigated the effects of the device on reactive postural control exercises. Seven healthy participants participated in this study. Three-dimensional acceleration data (Ax, Ay, and Az) were measured from participants during a single leg stance in each session. The peak Ax value generated by perturbations and responses significantly differed from baseline peak acceleration. The peak Ay value caused by perturbations was significantly decreased compared with baseline peak acceleration. In addition, the root mean square Ax value of the post-test significantly decreased compared with the pre-test value. Our results revealed that the proposed wearable balance exercise device was able to create small perturbations for assessing reactive postural balance control. Furthermore, the device was able to improve users’ stability.

1. Introduction
Fall prevention is important for extending the healthy lifespan of older individuals. Aging often causes disability related to muscle weakness, balance dysfunction, decreased joint kinetics, and kinematics during gait [1,2,3]. A decrease in the ability to control posture is correlated with the risk of fall among older individuals [4]. A previous study reported that balance impairment increases the risk of fall by 1.2 to 2.4 times [5]. Thus, improvement of balance function is important for the extension of the healthy life span of older individuals. To address this issue, physical therapists often provide balance-focused exercises for patients or older individuals, promoting the improvement of balance function. Previous studies revealed that balance exercises can improved balance function of healthy older individuals as well as prevent falls [6,7]. However, the improvement of balance function is difficult because balance function involves many components. Horak et al. [8] reported that balance is composed of many factors, including sensory, strength, motor coordination, and alignment. Sibley et al. [9] proposed the following nine components of balance: functional stability limits, underlying motor systems, static stability, dynamic stability, verticality, anticipatory postural control, sensory integration, cognitive influences, and reactive postural control. Although balance exercises can reduce the risk of falls, appropriate exercise programs designed for older individuals’ body functions and structure are required [10]. Balance exercises used for reactive postural control and stability are particularly important for fall prevention because reactive postural control is necessary for withstanding unexpected perturbations. Most older individuals exhibit decreased reactive postural control and dynamic stability. Compared with stable older individuals, unstable older individuals exhibit prolonged tibialis anterior muscle latency when experiencing unexpected fall conditions [11]. In addition, unstable older individuals tend to change their center of pressure (COP) trajectory in response to even small perturbations, compared with stable older individuals [12]. Exercises focused on reactive postural control and dynamic stability can improve postural control ability among older individuals. Pai et al. [13] reported that older individuals perform feed-forward control to prevent unexpected slips by mimicking slippery conditions. Zha et al. [14] reported that a balance assistance exoskeleton was able to help human single step balance strategies against perturbations. Another previous study reported that balance exercises using robotics to present perturbations can improve COP control and stability [15]. Moreover, systematic reviews also reported that perturbation-based balance exercises could reduce the risk of falls among older individuals [16]. However, balance exercises for reactive postural control have some limitations. First, these methods typically require large and expensive devices for generating perturbations. Second, these devices tend to be heavy, requiring metal frames and power sources. Finally, these methods can only be conducted in specific settings, such as laboratories or hospitals, because they require large devices and specialized environments. Thus, it is difficult for older individuals and patients to continue balance exercises for reactive postural control in their homes or other facilities.
Recently, a number of wearable assistive devices have been developed for human health and rehabilitation. These devices can assist human movement and aid activities of daily living. In many cases, soft wearable assistive devices use lightweight materials as actuators. Jin et al. [17] reported that a soft robotics suit using elastic bands improved gait kinematics and spatiotemporal parameters. Pneumatic artificial muscles are a useful actuator type that can be utilized in wearable assistive devices. This type of device has a number of beneficial characteristics, such as being lightweight, flexible, and inexpensive, compared with large exoskeleton devices. Although pneumatic artificial muscles are not able to generate large forces, previous studies reported that they can aid human movement and activities of daily living. Wearable walking suits using a pneumatic artificial muscle were reported to decrease muscle activity during gait [18]. In addition, a wearable force-feedback glove using pneumatic artificial muscles decreased upper limb muscle activity during upper limb movement [19]. Thus, soft wearable assistive devices may also contribute to the improvement of balance function.
In the current study, we designed a new wearable assistive device for improving balance function by generating small perturbations using pneumatic artificial muscles. In designing a device that could be applied in balance exercises, several features were incorporated, including lightweight design, the ability to generate small perturbations with a small power source, and the ability to assess reactive postural control.
The main contribution of the current paper is the development of a new wearable balance exercise device that is lightweight, portable, and able to generate small perturbations during exercise. Considering these feature requirements, we used pneumatic artificial muscles and a small CO2 tank for a wearable balance exercise device. Moreover, we used a three-dimensional accelerometer to determine whether this device was able to generate small perturbations and to examine whether users exhibited reactive postural control after the perturbations.
This paper is organized as follows. The background and purpose of this study are introduced in Section 1. In Section 2, the materials involved in the wearable balance exercise device are described, including the pneumatic artificial muscles and measurement protocol. In Section 3, the results of a series of tests of the device and the effects of the generated perturbations are presented. Section 4 discusses the effects of this device. Finally, Section 5 draws conclusions based on the current findings and provides several suggestions for future research.
2. Materials and Methods
2.1. Pneumatic Gel Muscle
We used pneumatic gel muscles (PGMs; Daiya Industry Co. Ltd., Okayama, Japan) for the wearable balance exercise device. The PGMs are shown in Figure 1. The PGM is a type of pneumatic artificial muscle. Although the structural design of a PGM is similar to that of the McKibben type pneumatic artificial muscle, it contracts less than the pneumatic artificial muscle at lower air pressures, thereby reducing the power requirements. Ogawa et al. [20] reported that the PGM possesses a force-generating capacity ranging from 50 kPa to 300 kPa of air pressure. The PGM consisted of a protective mesh and styrene-based thermoplastic elastomer inner tube and was used for wearable assistive devices in a previous study [18]. By using styrene-based thermoplastic elastomer inner tubes, artificial muscles are able to generate a greater force. This means that the air pressure required for actuating the PGM can be reduced compared with conventional pneumatic artificial muscles because of the characteristics of the inner tube [20]. In the current study, we used four PGMs with natural lengths of 250 mm.
2.2. Construction of Wearable Balance Exercise Device
We designed a soft wearable device for balance exercise using PGMs. The proposed device is shown in Figure 2. The device consists of a soft supporter, a soft pelvic belt, a PGM controller, an inertial measurement units (IMU) sensor, and four PGMs. Our purpose includes the design of a lightweight device for balance exercise because it is important to be able to use the device in a range of settings with a high level of portability and to easily attach the device in clinical site. The proposed device weighed only 0.9 kg, and it took less than 3 min for a beginner to attach the device. A Babo care and Zw-3 (NIPPON SIGMAX Co., Ltd., Tokyo, Japan) were used for soft support of the trunk and pelvis. The soft supporter and pelvic belt were used to support and affix the four PGMs. The two PGMs were attached on the front of body, and the other two PGMs were attached on the back of the body. The PGMs were attached to both sides of the acromion processes and pointed vertically down to the height of the iliac crest. Namely, the right side PGMs cause right side trunk bending from the positional relationship between the same side of PGMs and facet joints because the trunk has many facet joints of thoracic and lumber vertebrae. The system was divided into two sides: the controller side, which sends control signals, and the receiver side, which controls the PGMs. Both sides were controlled by ESP-WROOM-32 (Espressif Systems Pte. Ltd., Shanghai, china) and connected via WiFi.
As shown in Figure 3, five switches were implemented on the controller side. Each blue switch corresponded to the PGM control at each position; the front side of two PGMs contraction, the back side of two PGMs contraction, the left side of two PGMs contraction, and the right side of two PGMs contraction. Therefore, if the left or right side of the PGMs contracted, the device made the user bend the left or right side of the trunk, respectively. Conversely, if the antero-posterior side of PGMs contracted, the device induced trunk flexion or extension in the user. The yellow switch transmitted a signal indicating the start of measurement.
The receiver side had a solenoid valve to control PGMs and an M5Stack FIRE (M5Stack, Shenzhen, China). Air was supplied to the PGMs from a small CO2 tank, and the PGMs were controlled by turning on/off the solenoid valve according to the received signal. The M5Stack FIRE was equipped with an IMU (MPU 6050, TDK InvenSense, Seoul, Korea) and an SD card writer for outputting time-stamp, acceleration data, and the timing of PGM activation at each position.
The left side shows the hand switch for PGM contraction. The yellow switch is the start measurement button. The blue switches are the PGM contraction buttons for each direction. The right side shows the small air tank for PGM contraction. The tank was only 0.19 m in length.
Although IMU signal information and COP signal information are different, the IMU sensor can be used to assess postural sway. Previous studies reported that acceleration data during standing and stepping were strongly correlated with COP data [21,22]. The perturbation during the standing position not only affected COP shift, but also center of mass (COM) shift [23]. Therefore, the IMU sensor could be used to assess postural stability if it was attached close to the COM position without the need for large specialized equipment. This device control mechanism is shown in Figure 4.
To generate a small perturbation, it is necessary to know the contraction force generated by the PGM. Previous studies reported that the PGM contraction force was related to the stretched length and magnitude of air pressure [20,24]. In accordance with a previous study [24], the equation of the PGM contraction force was expressed as follows:
where Fcont is the contraction force generated by the PGM. L is the displacement length of the PGM from the stretched length of the PGM to rest length of the PGM, and P is the internal air pressure of the PGM. The a, b and c of the equation correspond to the coefficients 0.08857, 0.02618, and −0.02343, respectively [24]. One male volunteer with a standard build (height; 1.71 m, weight; 59.0 kg) participated for measuring the displacement length of the PGM while wearing the wearable balance exercise device. The measurement revealed a displacement length of the PGM of 150 mm. Therefore, if the PGM of the device was contracted in a 0.2 MPa condition, the PGM generated 24.7 N per PGM.
2.3. Participants and Measurement Protocol
To assess reactive postural control during a balance exercise with the proposed device, seven healthy participants (six males and one female) participated in this study. The mean age of the participants was 23.9 ± 2.0 years. The participants’ mean height was 1.70 ± 0.08 m, body weight was 56. ± 7.9 kg, and foot length was 0.26 ± 0.01 m. Only participants with no history of lower limb surgery and no pain during gait and single leg stance were included. Participant exclusion criteria included a history of neurological disorders and cardiovascular disorders.
Measurements for the current study were performed in the following order: a pre-test, reactive postural control assessment session, an exercise session, and post-test measurement. The protocol of this study is shown in Figure 5. Participants were asked to perform a single leg stance as a measurement task in each session. Single leg stance task is one of the general assessments for balance function, and this task is frequently used for the assessment of fall prevention [25,26]. In addition, single leg stance task is included in a clinical balance test such as berg balance test and BESTest as well as bipedal stance task. Participants were instructed to maintain their balance as consistently as possible during the single leg stance. During the single leg stance test, participants were asked to look at a sign 2 m away, which was placed at a height that corresponded to the height of their eyes, with their arms at their sides. Participants then performed a single leg stance using their dominant leg. The dominant leg was defined as the leg participants preferred to use to kick a ball [27]. To avoid the effects of auditory information, participants wore headphones and listened to music during the single leg stance in each session. In addition, all measurements were performed while participants were barefoot. The measurement task is shown in Figure 6
The first session of the study protocol was the pre-test. Participants performed a single leg stance on their dominant leg. Five seconds after beginning the single leg stance test, acceleration data were recorded for 30 s. Next, participants were asked to perform a single leg stance while wearing the balance exercise device in the reactive postural control assessment session. Before the session began, an examiner checked the positions of the PGMs and the force generated by the trunk perturbation in each direction. In this session, participants underwent perturbation of their dominant leg direction by PGMs contraction during single leg stance, with no warning. Participants then underwent an exercise session. Five seconds after beginning the single leg stance test, interventions by the balance exercise device were initiated and lasted for 30 s. PGM perturbations induced by the examiner occurred four times between 5 and 25 s. The side and timing of the perturbations were randomized. This intervention was repeated five times. If participants felt fatigued, they were allowed to rest at any time. After completion of the intervention phase, the single leg stance test was performed as a post-test under the same conditions as the pre-test.
2.4. Data Analysis
Acceleration data during the single leg stance were measured to assess the effects of the soft wearable balance exercise device and training effects. The acceleration data were collected with a 100 Hz sampling frequency and filtered with a 8 Hz cut-off, zero-phase, low-pass Butterworth filter. An IMU sensor was attached to the posterior trunk at the level of the fifth lumber spine (L5), because this level is close to the COM. The localization of L5 was defined based on two palpation techniques, based on a previous study [28]. The first technique defined L5 from the iliac crests as reference points in the standing position. The second technique defined L5 from the inferior margins of the posterior superior iliac spines as reference points in the standing position.
The peak acceleration value for the medio-lateral direction (Ax), vertical direction (Ay), and antero-posterior direction (Az) were measured to determine whether the wearable balance exercise device was able to induce perturbation in participants. Previous studies reported that postural control responses against unexpected perturbations occurred between +100 ms and +400 ms from the occurrence of the perturbation [29,30]. In addition, it has been reported that unexpected perturbations caused a COM shift in the direction of the perturbation [23,31]. Thus, we measured the same- and opposite-side directions of perturbation peak acceleration values as perturbation peaks (p-A; p-Ax, p-Ay, and p-Az) and response peaks (r-A; r-Ax, r-Ay, and r-Az), respectively, in the reactive postural control assessment session from 0 to +400 ms in relation to the perturbation time. Specifically, p-Ax was the dominant leg side direction, and p-Ay was the inferior direction, because the device caused bending of the dominant leg side trunk by PGM in the session. Regarding p-Az, the device had a weaker effect on the Az direction because this device mainly caused lateral side trunk bending. So, p-Az was seemingly more affected by standing position than PGMs. Thus, we measured the first peak of Az as the perturbation direction during this session. The baseline for the reactive postural control assessment session for the acceleration value was calculated in the interval from −500 ms to −10 ms before the moment of pushing the PGM contraction button. (b-A; b-Ax, b-Ay, and b-Az). The baseline peak acceleration value was calculated as an absolute value. We also set the perturbation period from the moment of pushing PGMs contraction button to 300 ms. Response period was set to 400 ms from the moment of p-A. We compared baseline peak acceleration, perturbation peak acceleration, and response peak acceleration. In addition, we compared the respective times (Tp-A; Tp-Ax, Tp-Ay, and Tp-Az. Tr-A; Tr-Ax, Tr-Ay, and Tr-Az) between each direction.
Moreover, we compared the root mean square (RMS) values of Ax, Ay, and Az in the pre- and post-test sessions to assess the effects of exercise. The acceleration data from 10 to 20 s of pre- and post-test were used for RMS calculation.
The normal perturbation of the data was verified using the Shapiro-Wilk test. A one-way repeated measures analysis of variance and multiple comparisons (Shaffer’s modified sequentially rejective Bonferroni procedure) were used to compare b-A, p-A, and r-A. Paired t-tests were used to compare Tp-A and Tr-A, as well as RMS between pre-test and post-test. All statistical analyses were performed with R version 2.8.1 (CRAN, freeware). Data were presented as mean ± standard deviation. Statistical significance was set at p < 0.05.
3. Results
3.1. The Effects of the Balance Exercise Device Using Perturbations
The results of the reactive postural control assessment session are shown in Table 1 and Table 2. Table 1 shows the peak acceleration value, and Table 2 shows the respective times. Figure 7 shows the acceleration values for a representative participant during the reactive postural control assessment sessions.
Peak Ax values varied significantly across the three periods (p < 0.001). Multiple comparisons analysis revealed a significant increase in p-Ax compared with b-Ax and r-Ax (p = 0.005, respectively). In addition, r-Ax significantly decreased compared with b-Ax (p = 0.043). The variation from p-Ax to r-Ax was 302.8 ± 148.4 mm/s2. Peak Ay varied significantly across the three periods (p < 0.001). Multiple comparisons analysis revealed a significant increase in p-Ay compared with b-Ay and r-Ay (p < 0.001, respectively). The variation from p-Ay to r-Ay was 445.0 ± 122.4 mm/s2. Peak Az did not vary significantly across the three periods (p = 0.643). The variation from p-Az to r-Az was 310.7 ± 190.2 mm/s2.
Tp-A varied significantly compared with Tr-A in all directions (p < 0.001, respectively). The variation from Tp-Ax and Tr-Ax was 140.0 ± 32.7 ms. The variation from Tp-Ay and Tr-Ay was 120.0 ± 51.6 ms. The variation from Tp-Az and Tr-Ax was 140.0 ± 55.4 ms.
The dominant leg side, superior, and anterior direction were defined as positive. The thin gray vertical line shows the moment of pushing the PGM contraction button.
3.2. RMS
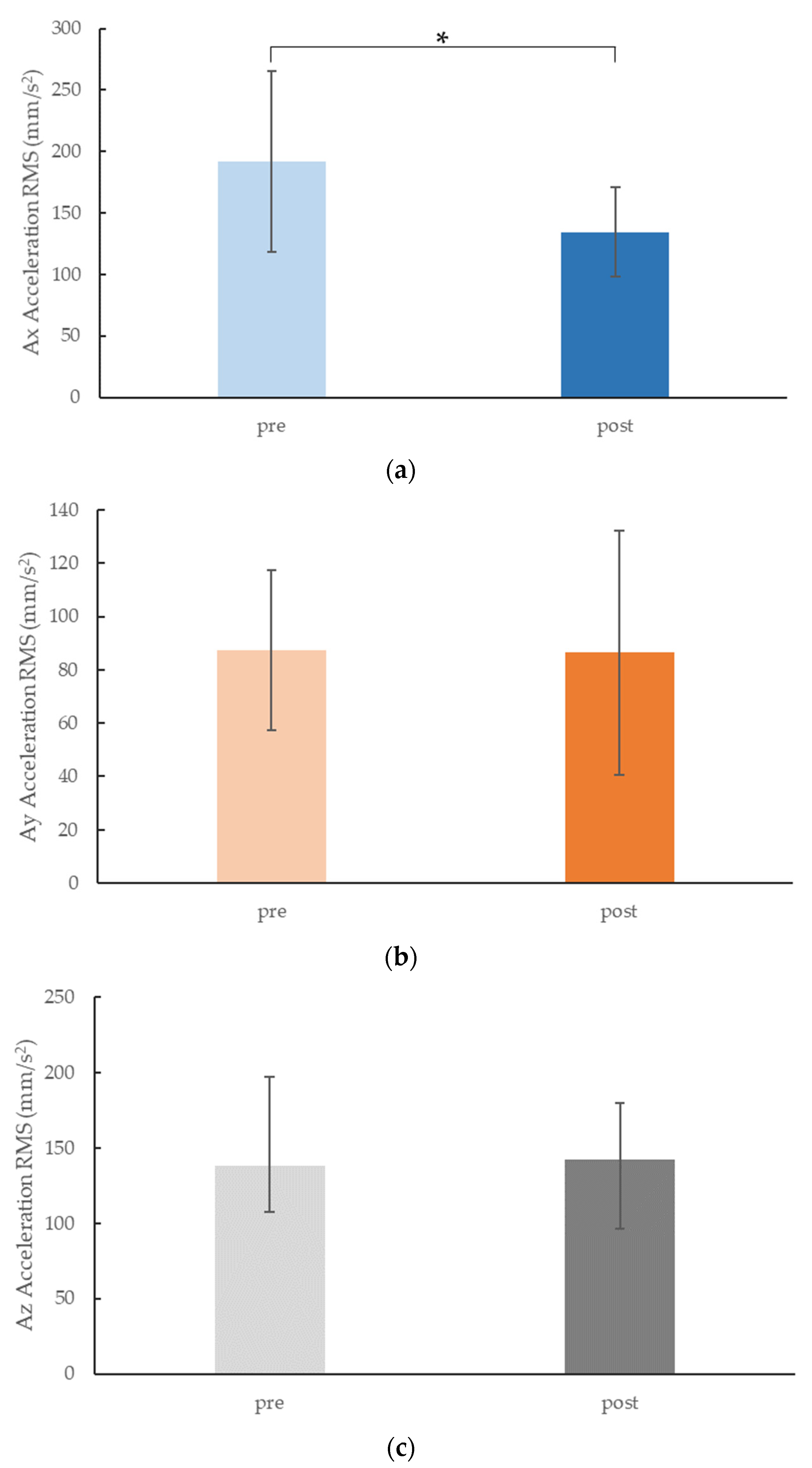
The RMS results during the pre- and post-test session are shown Figure 8. The Ax RMS values of the post-test session were significantly decreased compared with the Ax RMS values of the pre-test session (p = 0.037). In addition, the effect size (r) was large (r = 0.736). In contrast, no significant differences were identified for the Ay and Az RMS between the pre-test and post-test sessions (p = 0.952, and 0.883, respectively). Although the Az values exhibited a small effect size (r = 0.192), the Ay values did not exhibit a significant effect size (r = 0.025).
4. Discussion
The purpose of the current study was to design a new wearable assistive device for improving balance function by generating small perturbations. To achieve this purpose, the proposed device was required to possess various features, such as a lightweight design and the ability to generate small perturbations with a small power source, enabling users to exercise easily in a range of settings. Furthermore, we investigated the training effects of using this device to improve balance function.
We successfully designed a new soft wearable balance exercise device. The total weight of the proposed device was 0.9 kg, and it took less than 3 min for a beginner to attach the device. The proposed device was able to generate small perturbations without a large power source using PGMs and a small CO2 tank. In addition, therapists and examiners are able to present balance exercise easily using the proposed device, because the direction of perturbation can be easily manipulated using the controller.
The p-Ax and p-Ay varied significantly compared with b-Ax and b-Ay. In the reactive postural control assessment session, the results revealed that the proposed device generated small perturbations on the dominant leg side and in the inferior direction, because the lateral side PGMs caused bending of the participants’ trunk on the dominant leg side. In addition, trunk bending caused COM movement in the mediolateral direction. Thus, r-Ax also varied significantly compared with b-A. Regarding the time of perturbation and reaction, Tr-Ax, Ay, and Az significantly increased compared with Tp-Ax, Ay, and Az, respectively. All directions of variation from Tp-A to Tr-A were similar (average time was 133.3 ms). Previous studies reported that postural control responses against unexpected perturbations occurred between +100 ms and +400 ms from the occurrence of perturbation [29,30], and the timing range depended on the outcome. Muscle activity responses against unexpected perturbation have been reported to occur very early, at approximately 60 to 100 ms after perturbation [32]. The kinematic and kinetic changes against unexpected perturbation have been reported to be delayed from muscle activity responses at approximately 50 to 80 ms because of electromechanical delay [29,33]. Another previous study reported that maximum angular displacement due to perturbation appeared from 100 to 400 ms after perturbation [30]. These time-windows were similar to those observed in the current results using acceleration data. Considering the factors discussed above and the findings of previous studies, the proposed wearable device appears to be able to create small perturbations that are appropriate for assessing reactive postural control. In contrast, Tp-Ax, Ay, and Az occurred more than 100 ms after the moment of pushing the PGM contraction button. The PGMs used in our study took approximately 150 ms to achieve maximum contraction force. Therefore, it appears that Tp-A was likely to have been greater than 100 ms for the reason discussed above.
The Ax RMS had a higher degree of non-stationarity than Ay and Az. This result was seemingly affected by the measurement task because the ML direction base of the support decrease in a single leg stance condition. ML velocity and displacement tend to increase compared to AP in a single leg stance [34,35]. Our results were consistent with these previous studies. The Ax RMS in the post-test session was significantly decreased compared with the Ax RMS in the pre-test session. Although the exercise duration was not long, the effect size was large. RMS of the acceleration was used as the main parameter of the balance function during the balance exercise, such as single leg stance and double leg stance. Previous studies reported that older individuals with greater instability, and peripheral neuropathy patients, exhibited increased RMS values [36,37]. Therefore, the current results suggest that the proposed wearable balance exercise device was able to improve stability using small perturbations in healthy adults.
The stronger effect on Ax RMS compared with Ay and Az RMS appears to be related to the position of the PGMs in the proposed device. A soft supporter and pelvic belt were used to support and affix the four PGMs. The PGMs of this device were attached to both sides of the acromion processes and pointed vertically down to the height of the iliac crest, to cause perturbations in the participant’s trunk in four directions. This positional relationship of the PGMs caused the moment arm of left side/right side trunk bending to be longer than the moment arm of trunk flexion/extension. Thus, balance exercise using this device appeared to have a stronger effect on Ax RMS.
The present study involved several limitations that should be considered. The sample size was relatively small. Although the current results indicated that the proposed wearable balance exercise device improved postural control and stability, further investigations examining a larger number of participants will be required to establish the clinical usefulness of the device. It is also important to investigate the long term effectiveness of the device for older individuals as a future research. In addition, we did not examine the effects of changing the magnitude of the perturbation force. Further studies will be required to further develop the device, including the ability to adjust the perturbation force features.
5. Conclusions
In the current study, we designed a new wearable balance exercise device for generating small perturbations. To design a device that was suitable for balance exercises, several features were incorporated, including a lightweight design, the ability to generate small perturbations with a small power source, and the ability to assess reactive postural control. The total weight of the proposed wearable balance exercise device was 0.9 kg, and it took less than 3 min for a beginner to attach the device. The proposed device was able to generate small perturbations without a large power source using PGMs and a small CO2 tank.
The current results revealed that this new wearable balance exercise device was able to generate small perturbations for assessing the reactive postural control of balance. Furthermore, the proposed wearable balance exercise device was able to improve stability. Further studies will be required to develop the device further, including the ability to adjust the features of the perturbation force.
Author Contributions
Conceptualization, M.Y.; methodology, M.Y. and K.S.; software, Y.K. (Yusuke Kishishita); validation, M.Y. and Y.K. (Yusuke Kishishita); formal analysis, M.Y. and Y.K. (Yusuke Kishishita); investigation, M.Y.; resources, Y.K. (Yusuke Kishishita); data curation, M.Y.; writing—original draft preparation, M.Y.; writing—review and editing, M.Y.; visualization, M.Y.; supervision, K.S. and Y.K. (Yuichi Kurita); project administration, Y.K. (Yuichi Kurita); funding acquisition, Y.K. (Yuichi Kurita).
Funding
This research was based on results obtained from a project commissioned by the New Energy and Industrial Technology Development Organization (NEDO).
Acknowledgments
We thank Benjamin Knight from Edanz Group (www.edanzediting.com/ac) for editing a draft of this manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Judge, J.O.; Davis, R.B.; Ounpuu, S. Step length reductions in advanced age: The role of ankle and hip kinetics. J. Gerontol. A. Biol. Sci. Med. Sci. 1996, 51, M303–M312. [Google Scholar] [CrossRef] [PubMed]
- Roubenoff, R.; Hughes, V.A. Sarcopenia: Current concepts. J. Gerontol. Ser. 2000, 55, 716–724. [Google Scholar] [CrossRef] [PubMed]
- Amiridis, I.G.; Hatzitaki, V.; Arabatzi, F. Age-induced modifications of static postural control in humans. Neurosci. Lett. 2003, 350, 137–140. [Google Scholar] [CrossRef]
- Berg, K.O.; Maki, B.E.; Williams, J.I.; Holliday, P.J.; Wood-Dauphinee, S.L. Clinical and laboratory measures of postural balance in an elderly population. Arch. Phys. Med. Rehabil. 1992, 73, 1073–1080. [Google Scholar] [PubMed]
- Tinetti, M.E.; Kumar, C. The patient who falls: “It’s always a trade-off”. JAMA 2010, 303, 258–266. [Google Scholar] [CrossRef] [PubMed]
- Madureira, M.M.; Takayama, L.; Gallinaro, A.L.; Caparbo, V.F.; Costa, R.A.; Pereira, R.M. Balance training program is highly effective in improving functional status and reducing the risk of falls in elderly women with osteoporosis: A randomized controlled trial. Osteoporos. Int. 2007, 18, 419–425. [Google Scholar] [CrossRef]
- Lesinski, M.; Hortobágyi, T.; Muehlbauer, T.; Gollhofer, A.; Granacher, U. Effects of Balance Training on Balance Performance in Healthy Older Adults: A Systematic Review and Meta-analysis. Sports Med. 2015, 45, 1721–1738. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Horak, F.B. Clinical assessment of balance disorders. Gait Posture 1997, 6, 76–84. [Google Scholar] [CrossRef]
- Sibley, K.M.; Beauchamp, M.K.; Van Ooteghem, K.; Straus, S.E.; Jaglal, S.B. Using the systems framework for postural control to analyze the components of balance evaluated in standardized balance measures: A scoping review. Arch. Phys. Med. Rehabil. 2015, 96, 122–132. [Google Scholar] [CrossRef]
- Sherrington, C.; Whitney, J.C.; Lord, S.R.; Herbert, R.D.; Cumming, R.G.; Close, J.C.T. Effective exercise for the prevention of falls: A systematic review and meta-analysis. J. Am. Geriatr. Soc. 2008, 56, 2234–2243. [Google Scholar] [CrossRef]
- Studenski, S.; Duncan, P.W.; Chandler, J. Postural responses and effector factors in persons with unexplained falls: Results and methodologic issues. J. Am. Geriatr. Soc. 1991, 39, 229–234. [Google Scholar] [CrossRef]
- Lin, S.I.; Woollacott, M.H.; Jensen, J.L. Postural response in older adults with different levels of functional balance capacity. Aging Clin. Exp. Res. 2004, 16, 369–374. [Google Scholar] [CrossRef]
- Pai, Y.-C.; Wening, J.D.; Runtz, E.F.; Iqbal, K.; Pavol, M.J. Role of feedforward control of movement stability in reducing slip-related balance loss and falls among older adults. J. Neurophysiol. 2006, 90, 755–762. [Google Scholar] [CrossRef]
- Zha, F.; Sheng, W.; Guo, W.; Qiu, S.; Wang, X.; Chen, F. The exoskeleton balance assistance control strategy based on single step balance assessment. Appl. Sci. 2019, 9, 884. [Google Scholar] [CrossRef]
- Ozaki, K.; Kagaya, H.; Hirano, S.; Kondo, I.; Tanabe, S.; Itoh, N.; Saitoh, E.; Fuwa, T.; Murakami, R. Preliminary trial of postural strategy training using a personal transport assistance robot for patients with central nervous system disorder. Arch. Phys. Med. Rehabil. 2013, 94, 59–66. [Google Scholar] [CrossRef]
- Mansfield, A.; Wong, J.S.; Bryce, J.; Knorr, S.; Patterson, K.K. Does perturbation-based balance training prevent falls? Systematic review and meta-analysis of preliminary randomized controlled trials. Phys. Ther. 2015, 95, 700–709. [Google Scholar] [CrossRef]
- Jin, S.; Xiong, X.; Zhao, D.; Jin, C.; Yamamoto, M. Long-Term effects of a soft robotic suit on gait characteristics in healthy elderly persons. Appl. Sci. 2019, 9, 1957. [Google Scholar] [CrossRef]
- Thakur, C.; Ogawa, K.; Tsuji, T.; Kurita, Y. Soft wearable augmented walking suit with pneumatic gel muscles and stance phase detection system to assist gait. IEEE Autom. Lett. 2018, 3, 4257–4264. [Google Scholar] [CrossRef]
- Das, S.; Lowell, C.; Kishishita, Y.; Ogawa, K.; Tsuji, T.; Kurita, Y. Forcehand glove: A wearable force-feedback glove with pneumatic artificial muscles (PAMs). IEEE Autom. Lett. 2018, 3, 2416–2423. [Google Scholar] [CrossRef]
- Ogawa, K.; Thakur, C.; Ikeda, T.; Tsuji, T.; Kurita, Y. Development of a pneumatic artificial muscle driven by low pressure and its application to the unplugged powered suit. Adv. Robot. 2017, 31, 1135–1143. [Google Scholar] [CrossRef]
- Mancini, M.; Zampieri, C.; Carlson-Kuhta, P.; Chiari, L.; Horak, F.B. Anticipatory postural adjustments prior to step initiation are hypometric in untreated parkinson’s disease: An accelerometer-based approach. Eur. J. Neurol. 2009, 16, 1028–1034. [Google Scholar] [CrossRef]
- Mancini, M.; Salarian, A.; Carlson-kuhta, P.; Zampieri, C.; King, L.; Chiari, L.; Horak, F.B. ISway: A sensitive, valid and reliable measure of postural control. J. Neuroeng. Rehabil. 2012, 9, 1. [Google Scholar] [CrossRef]
- Hughey, L.K.; Fung, J. Postural responses triggered by multidirectional leg lifts and surface tilts. Exp. Brain Res. 2005, 165, 152–166. [Google Scholar] [CrossRef]
- Thakur, C.; Ogawa, K.; Kurita, Y. Active passive nature of assistive wearable gait augment suit for enhanced mobility. J. Robot. Mechatron. 2018, 30, 717–728. [Google Scholar] [CrossRef]
- Macrae, P.G.; Lacourse, M.; Moldavon, R. Physical performance measures that predict faller status in community-dwelling older adults. J. Orthop. Sports Phys. Ther. 1992, 16, 123–128. [Google Scholar] [CrossRef]
- Michikawa, T.; Nishiwaki, Y.; Takebayashi, T.; Toyama, Y. One-leg standing test for elderly populations. J. Orthop. Sci. 2009, 14, 675–685. [Google Scholar] [CrossRef]
- Dingenen, B.; Staes, F.F.; Janssens, L. A new method to analyze postural stability during a transition task from double-leg stance to single-leg stance. J. Biomech. 2013, 46, 2213–2219. [Google Scholar] [CrossRef]
- Merz, O.; Wolf, U.; Robert, M.; Gesing, V.; Rominger, M. Validity of palpation techniques for the identification of the spinous process L5. Man. Ther. 2013, 18, 333–338. [Google Scholar] [CrossRef]
- Cavanagh, P.R.; Komi, P.V. Electromechanical delay in human skeletal muscle under concentric and eccentric contractions. Eur. J. Appl. Physiol. Occup. Physiol. 1979, 42, 159–163. [Google Scholar] [CrossRef]
- Santos, M.J.; Kanekar, N.; Aruin, A.S. The role of anticipatory postural adjustments in compensatory control of posture: 2. Biomechanical analysis. J. Electromyogr. Kinesiol. 2010, 20, 398–405. [Google Scholar] [CrossRef] [Green Version]
- Henry, S.M.; Fung, J.; Horak, F.B. Effect of stance width on multidirectional postural responses. J. Neurophysiol. 2017, 85, 559–570. [Google Scholar] [CrossRef]
- Santos, M.J.; Kanekar, N.; Aruin, A.S. The role of anticipatory postural adjustments in compensatory control of posture: 1. Electromyographic analysis. J. Electromyogr. Kinesiol. 2010, 20, 388–397. [Google Scholar] [CrossRef]
- Vint, P.F.; McLean, S.P.; Harron, G.M. Electromechanical delay in isometric actions initiated from nonresting levels. Med. Sci. Sports Exerc. 2001, 33, 978–983. [Google Scholar] [CrossRef]
- Da Silva, R.A.; Bilodeau, M.; Parreira, R.B.; Teixeira, D.C.; Amorim, C.F. Age-related differences in time-limit performance and force platform-based balance measures during one-leg stance. J. Electromyogr. Kinesiol. 2013, 23, 634–639. [Google Scholar] [CrossRef]
- Verhagen, E.; Bobbert, M.; Inklaar, M.; van Kalken, M.; Van der Beek, A.; Bouter, L.; Van Mechelen, W. The effect of a balance training programme on centre of pressure excursion in one-leg stance. Clin. Biomech. 2005, 20, 1094–1100. [Google Scholar] [CrossRef] [Green Version]
- Moe-Nilssen, R.; Helbostad, J.L. Trunk accelerometry as a measure of balance control during quiet standing. Gait Posture 2002, 16, 60–68. [Google Scholar] [CrossRef]
- Turcot, K.; Allet, L.; Golay, A.; Hoffmeyer, P.; Armand, S. Investigation of standing balance in diabetic patients with and without peripheral neuropathy using accelerometers. Clin. Biomech. 2009, 24, 716–721. [Google Scholar] [CrossRef]
Figure 1.
PGMs used in this study.

Figure 2.
Soft wearable balance exercise device.
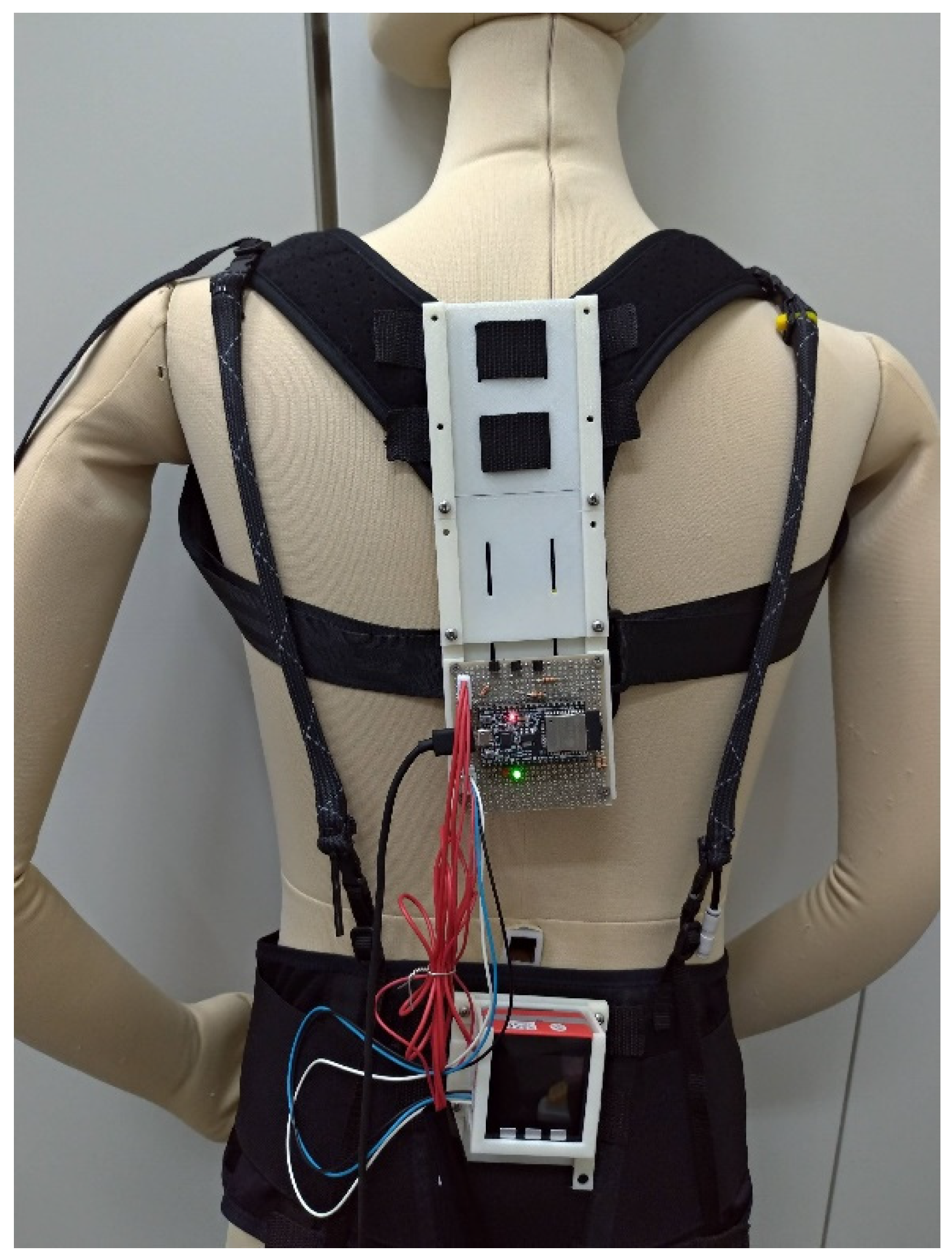
Figure 3.
Hand switch and small CO2 tank.
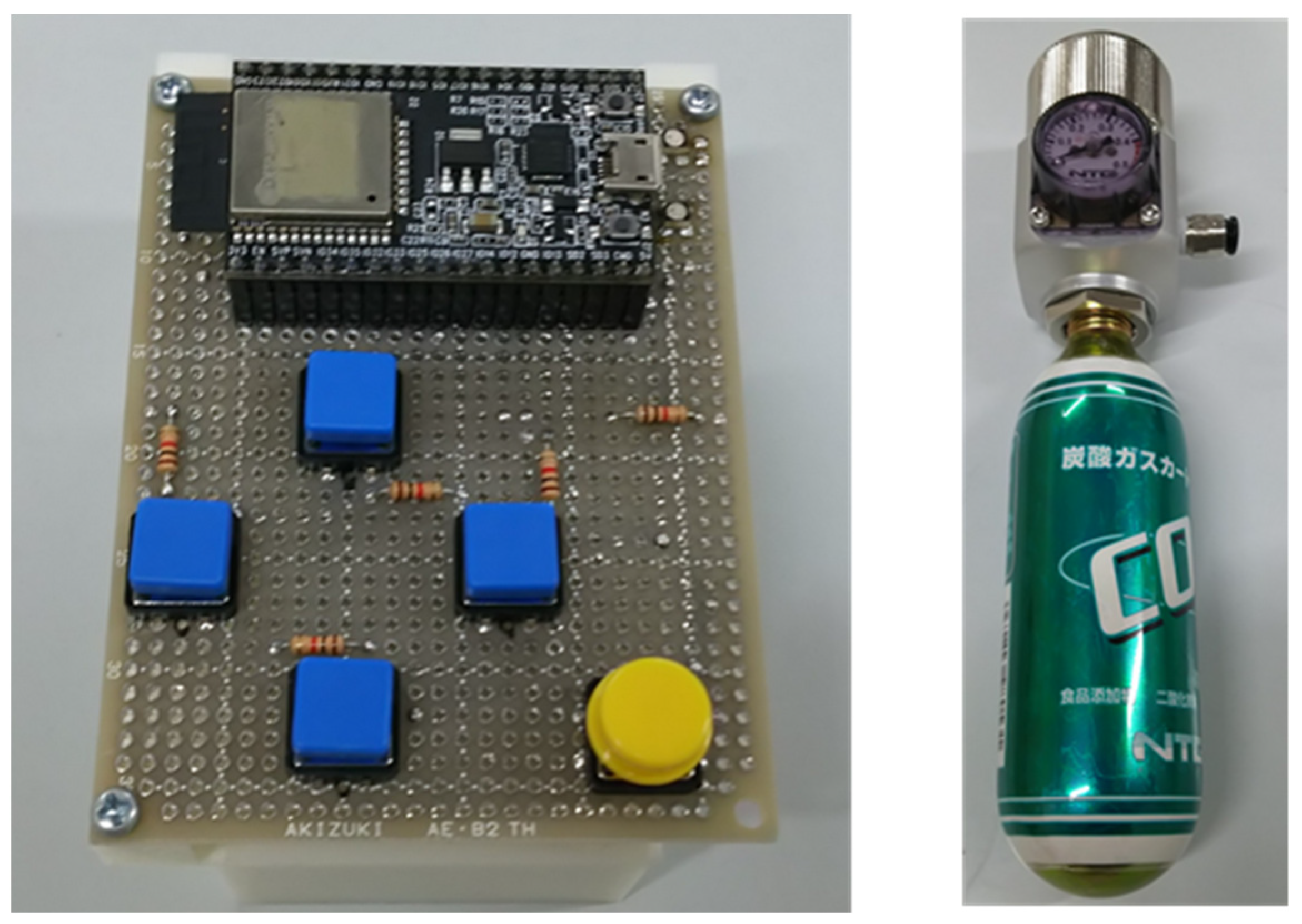
Figure 4.
The PGMs in the soft wearable balance device control mechanism.
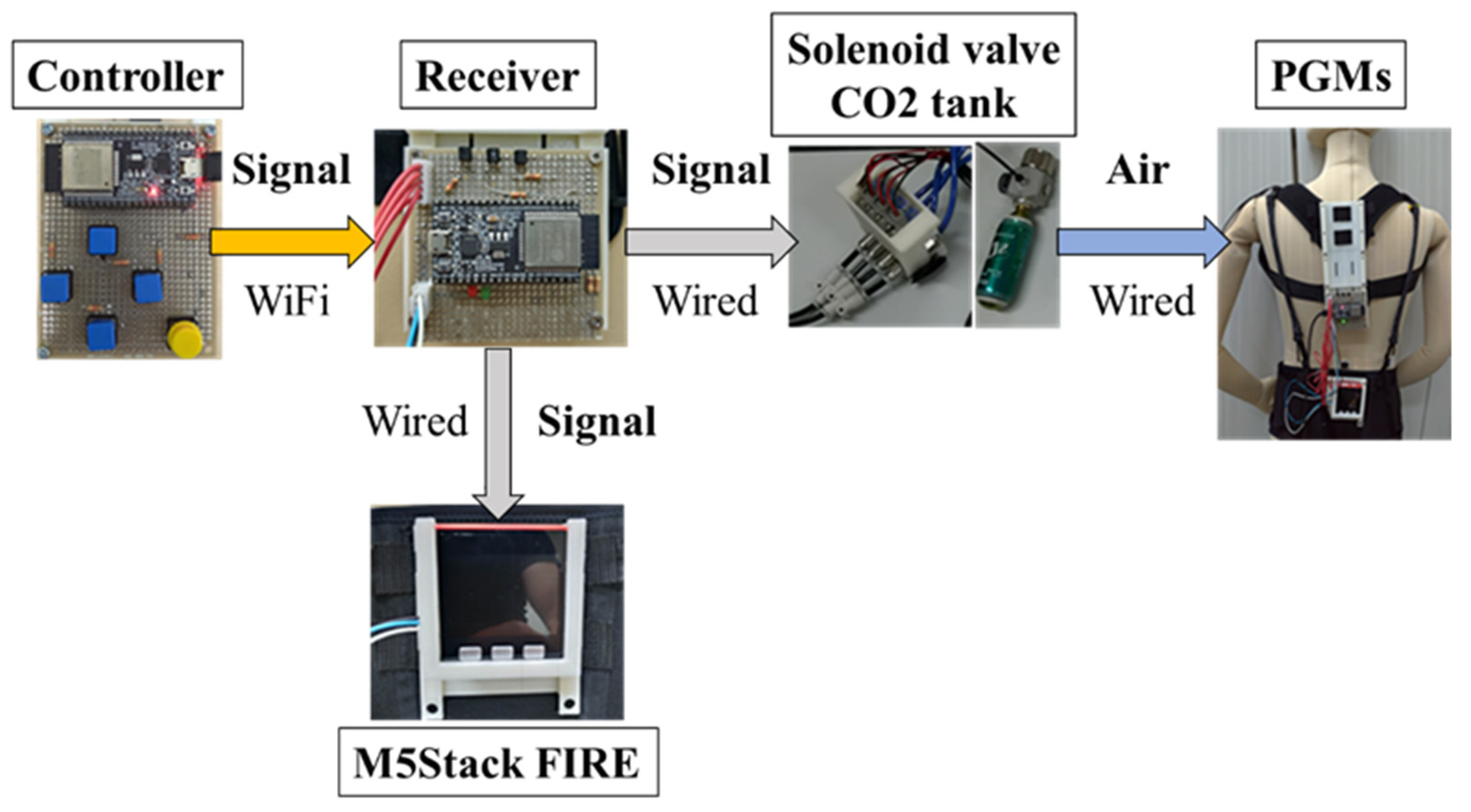
Figure 5.
Subject’s measurement task using wearable balance exercise device.

Figure 6.
Subject’s measurement task using wearable balance exercise device.

Figure 7.
Acceleration value during the reactive postural control assessment session. (a) Ax value during reactive postural control assessment session. (b) Ay value during reactive postural control assessment session. (c) Az value during the reactive postural control assessment session.
Figure 7.
Acceleration value during the reactive postural control assessment session. (a) Ax value during reactive postural control assessment session. (b) Ay value during reactive postural control assessment session. (c) Az value during the reactive postural control assessment session.
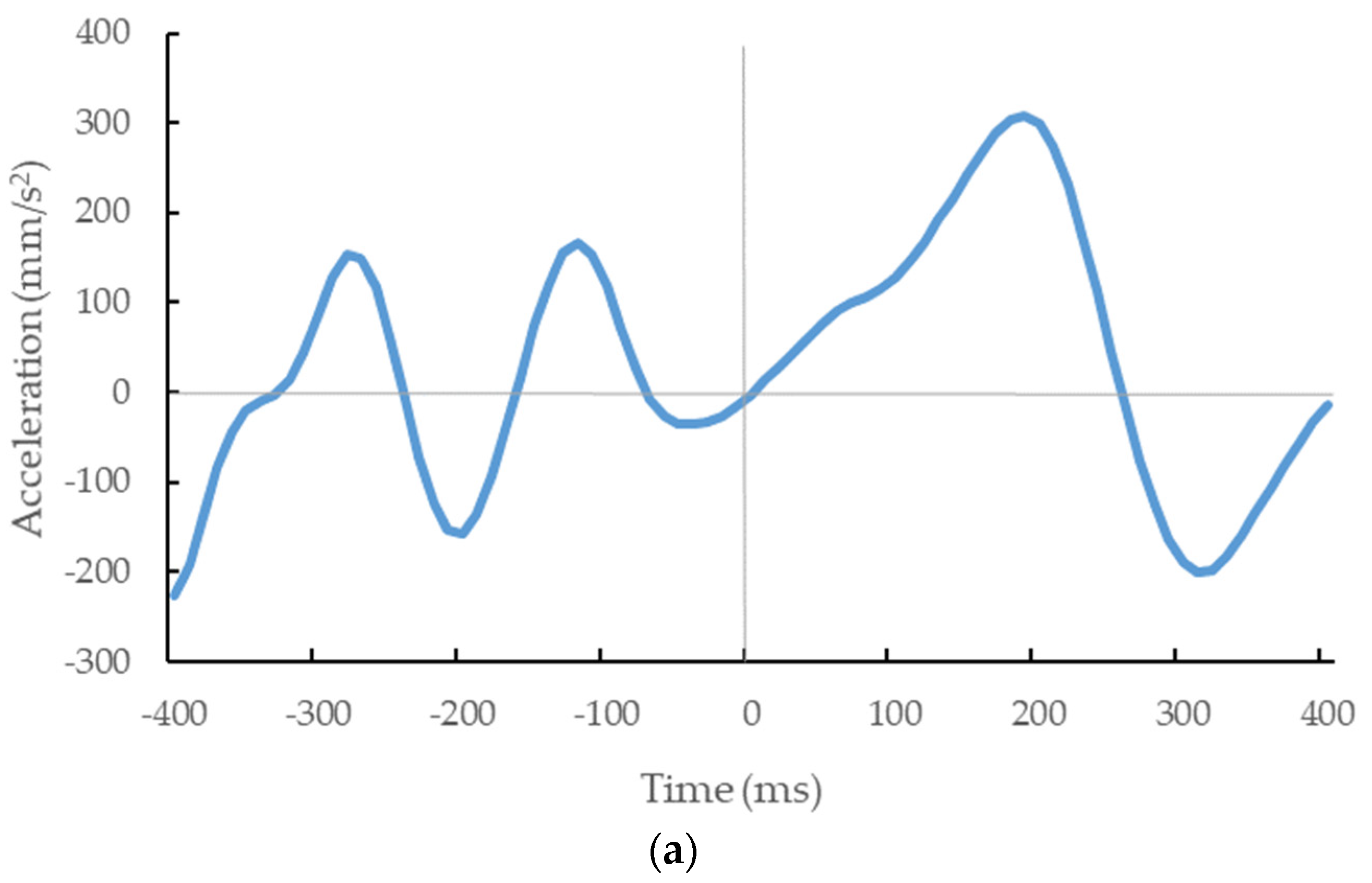

Figure 8.
The acceleration RMS values in the pre-test and post-test session. An asterisk (*) indicates a significant difference (p < 0.05). (a) Ax acceleration RMS. (b) Ay acceleration RMS. (c) Az acceleration RMS.
Figure 8.
The acceleration RMS values in the pre-test and post-test session. An asterisk (*) indicates a significant difference (p < 0.05). (a) Ax acceleration RMS. (b) Ay acceleration RMS. (c) Az acceleration RMS.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Peak acceleration values in each period.
| b-A | p-A | r-A | |
|---|---|---|---|
| Ax (mm/s2) | 167.0 ± 122.4 | 237.3 ± 92.2 ** †† | −65 ± 120.0 * |
| Ay (mm/s2) | 164.5 ± 76.9 | −307.6 ± 130.4 ** †† | 137.3 ± 52.8 |
| Az (mm/s2) | 143.7 ± 56.1 | 187.1 ± 247.8 | 75.5 ± 255.8 |
Average ± standard deviation. An asterisk (*, **) indicates a significant difference compared to the b-A period (p < 0.05 and p < 0.01, respectively), while a cross (†, ††) indicates a significant difference compared with the r-A condition (p < 0.05 and p < 0.01, respectively). The dominant leg side, superior, and anterior direction were defined as positive.
Table 2.
Time of peak acceleration value.
| Tp-A | Tr-A | |
|---|---|---|
| Ax (ms) | 147.1 ± 77.4 | 287.1 ± 84.6 ** |
| Ay (ms) | 137.1 ± 63.7 | 257.1 ± 69.9 ** |
| Az (ms) | 111.4 ± 70.6 | 251.4 ± 56.4 ** |
Average ± standard deviation. An asterisk (*, **) indicates a significant difference compared with the Tp-A period (p < 0.05 and p < 0.01, respectively).
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yamamoto, M.; Kishishita, Y.; Shimatani, K.; Kurita, Y. Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles. Appl. Sci. 2019, 9, 3108. https://doi.org/10.3390/app9153108
AMA Style
Yamamoto M, Kishishita Y, Shimatani K, Kurita Y. Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles. Applied Sciences. 2019; 9(15):3108. https://doi.org/10.3390/app9153108
Chicago/Turabian StyleYamamoto, Masataka, Yusuke Kishishita, Koji Shimatani, and Yuichi Kurita. 2019. "Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles" Applied Sciences 9, no. 15: 3108. https://doi.org/10.3390/app9153108
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.