Latent Leakage Fault Identification and Diagnosis Based on Multi-Source Information Fusion Method for Key Pneumatic Units in Chinese Standard Electric Multiple Units (EMU) Braking System


Abstract
:1. Introduction
2. Standard EMU Brake System
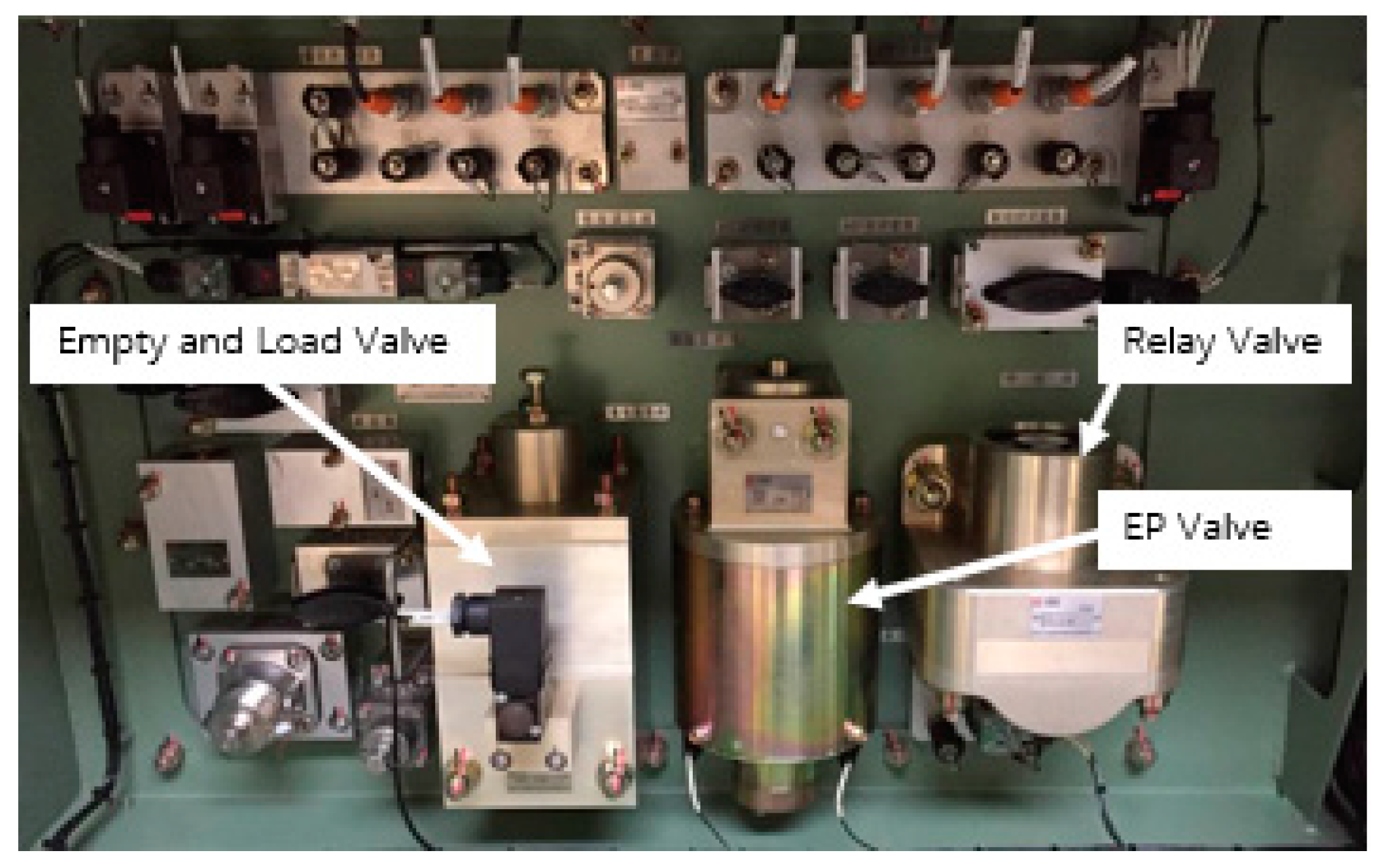
2.1. Standard EMU Brake Control Device
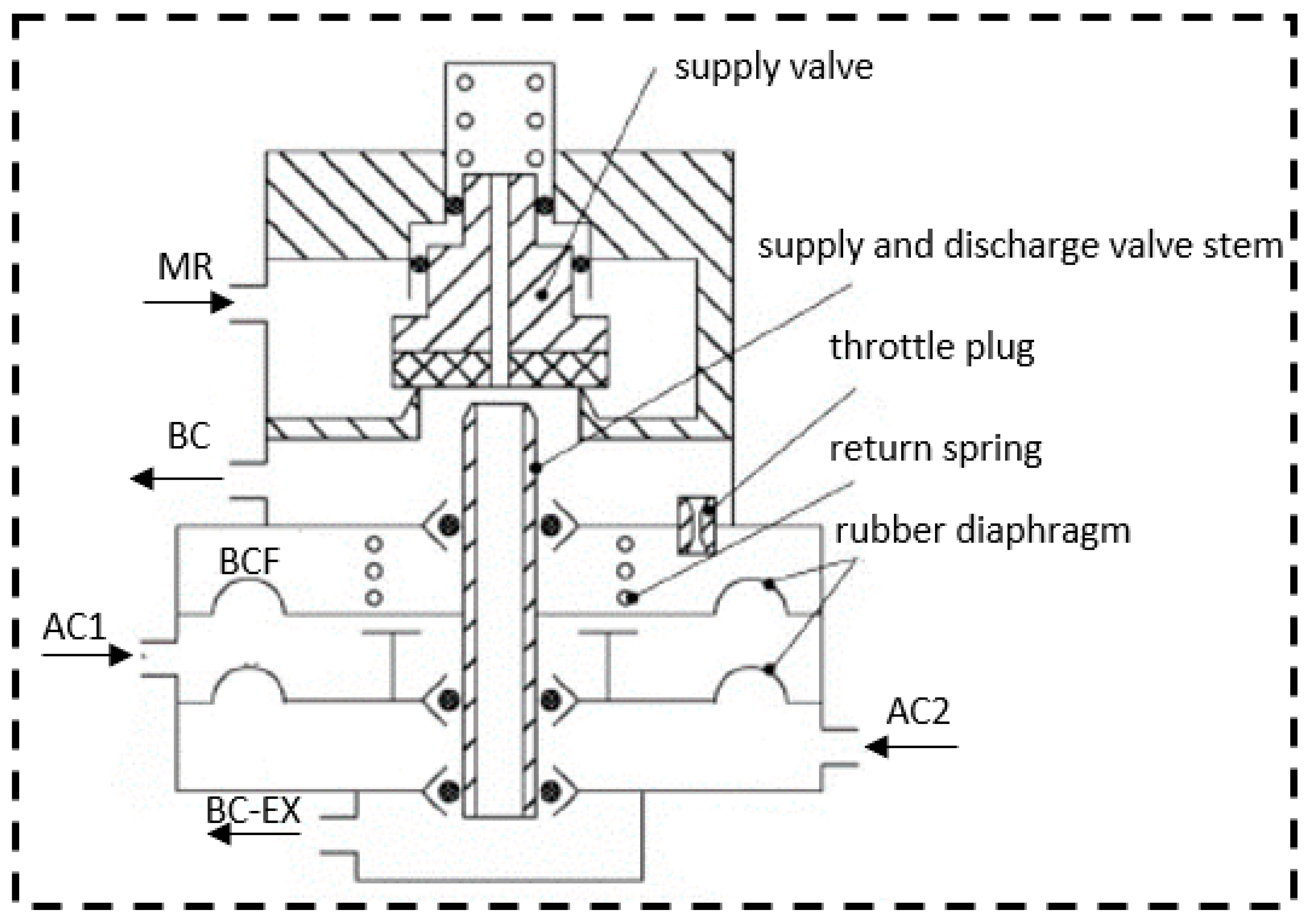
2.2. Relay Valve Structure and Leakage Fault
3. Multi-Source Information Fusion Method
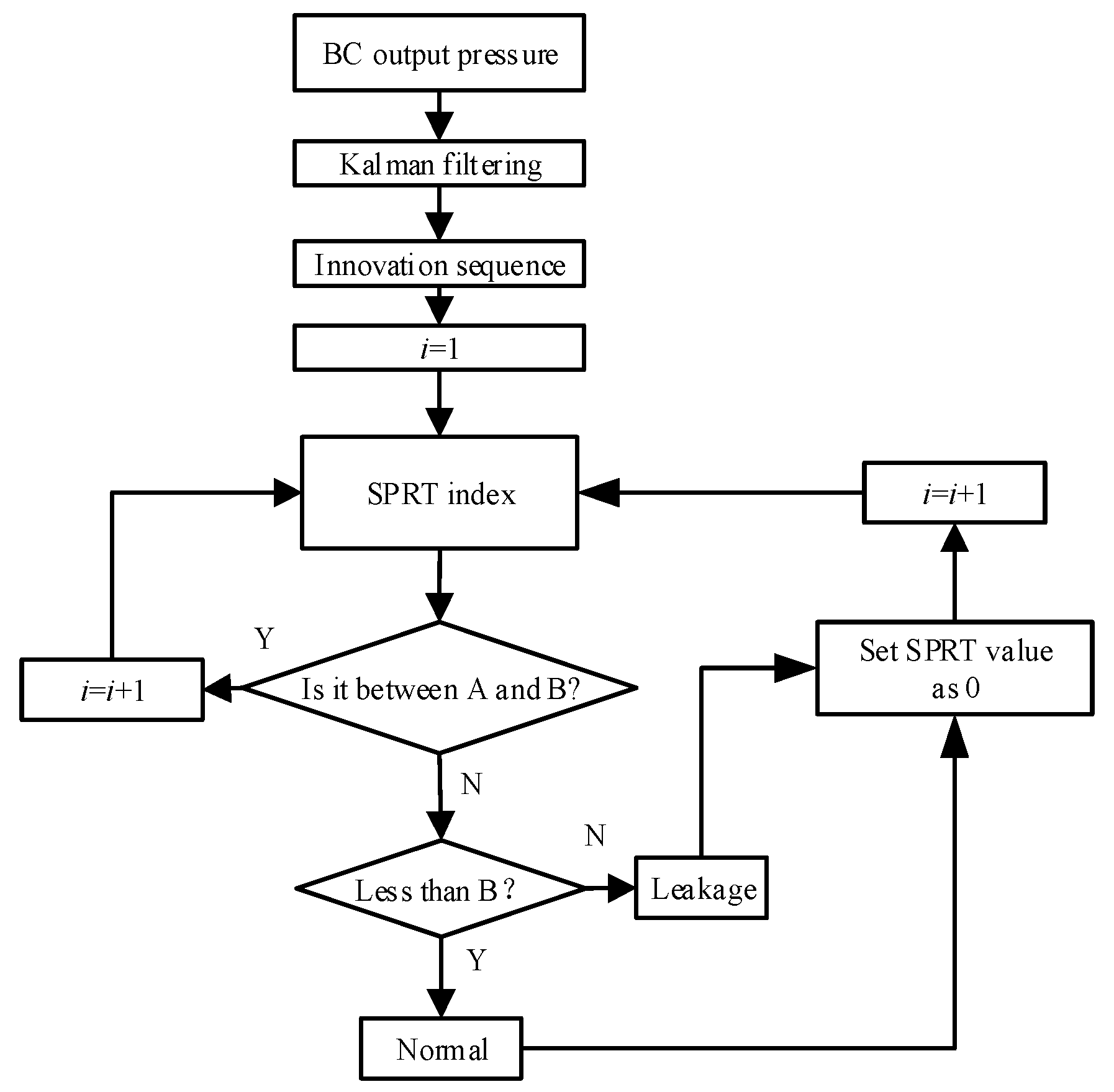
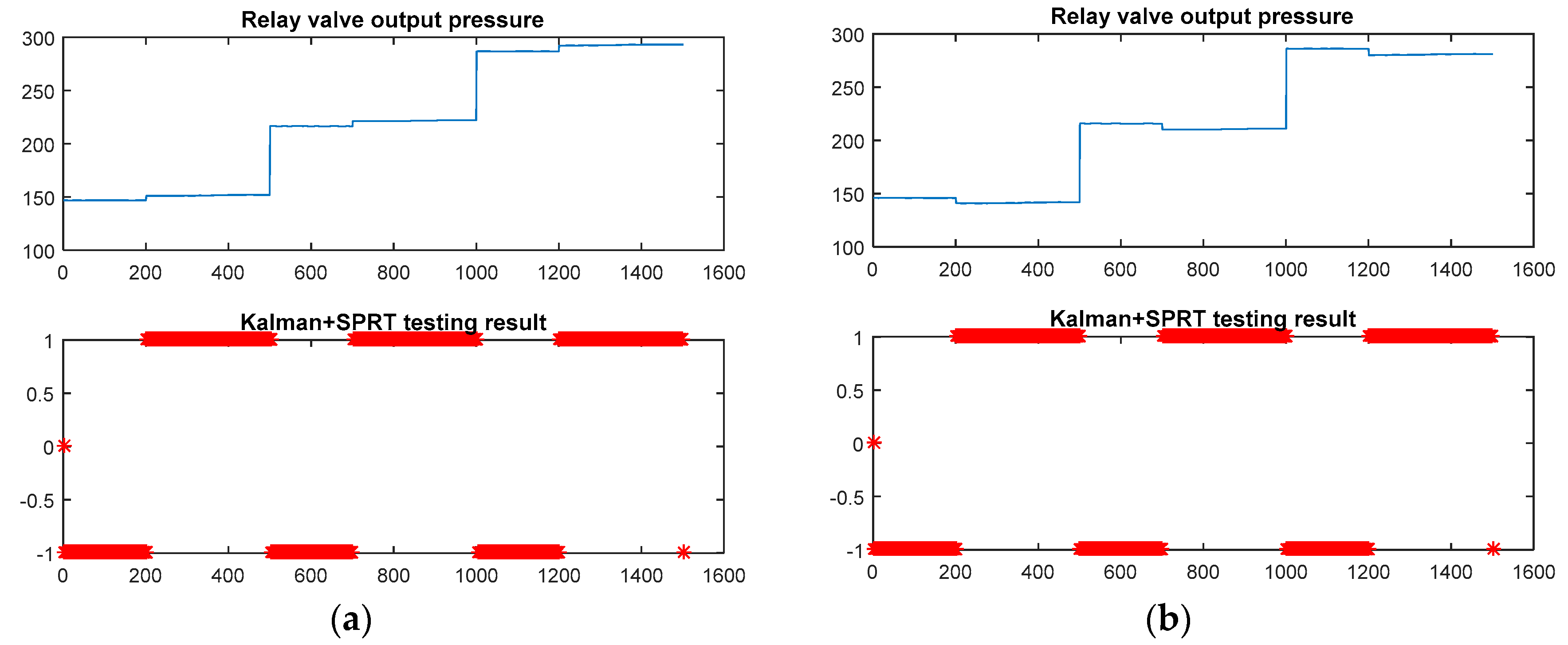
3.1. Leakage Detection Based on Kalman Filter and SPRT
3.1.1. Kalman Filtering
3.1.2. Sequential Probability Ratio Test
- Normally, the sequence satisfies the null hypothesis H0: μ = μ0;
- In leakage, the sequence satisfies the alternative hypothesis H1: μ = μ0 + Δμ.
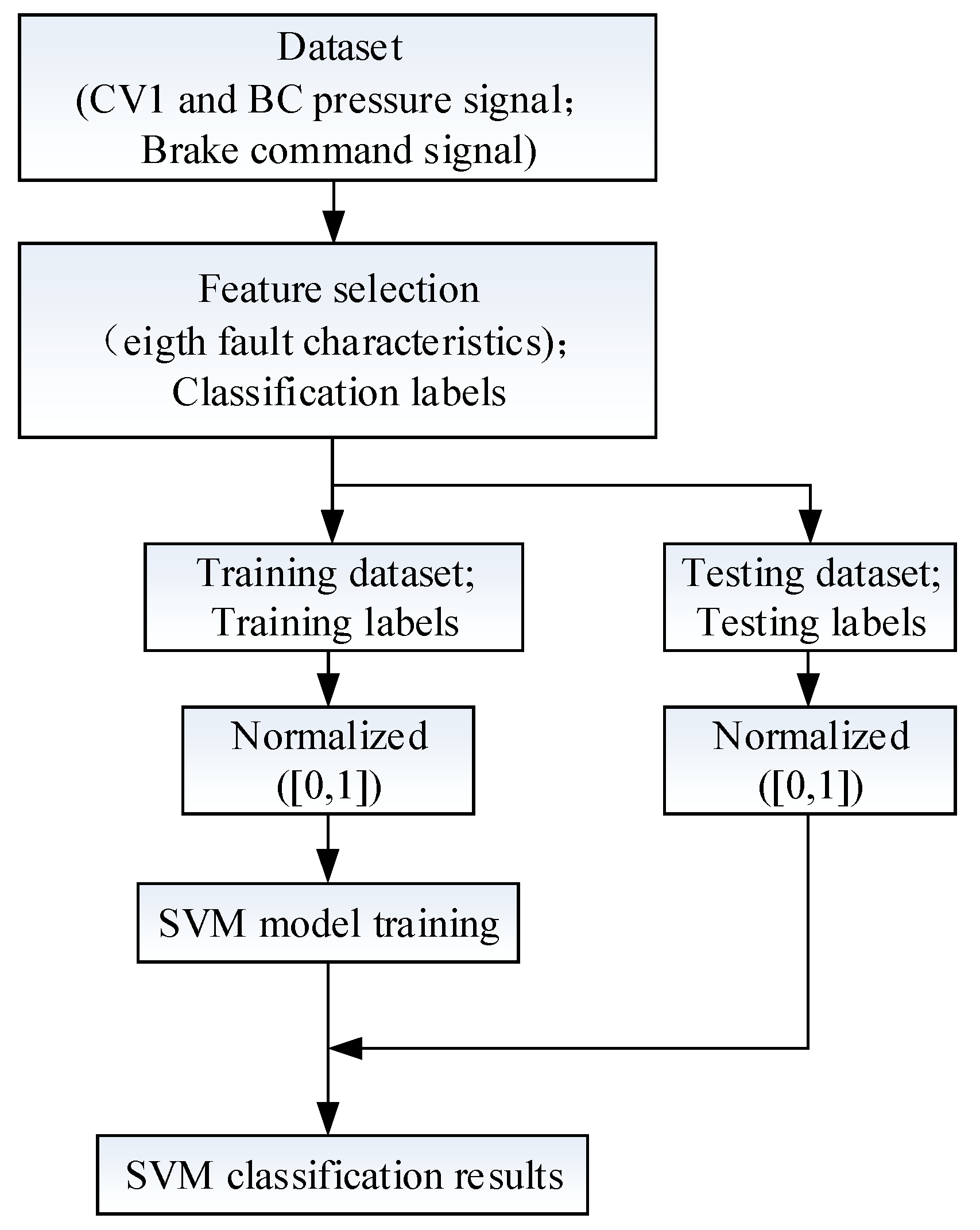
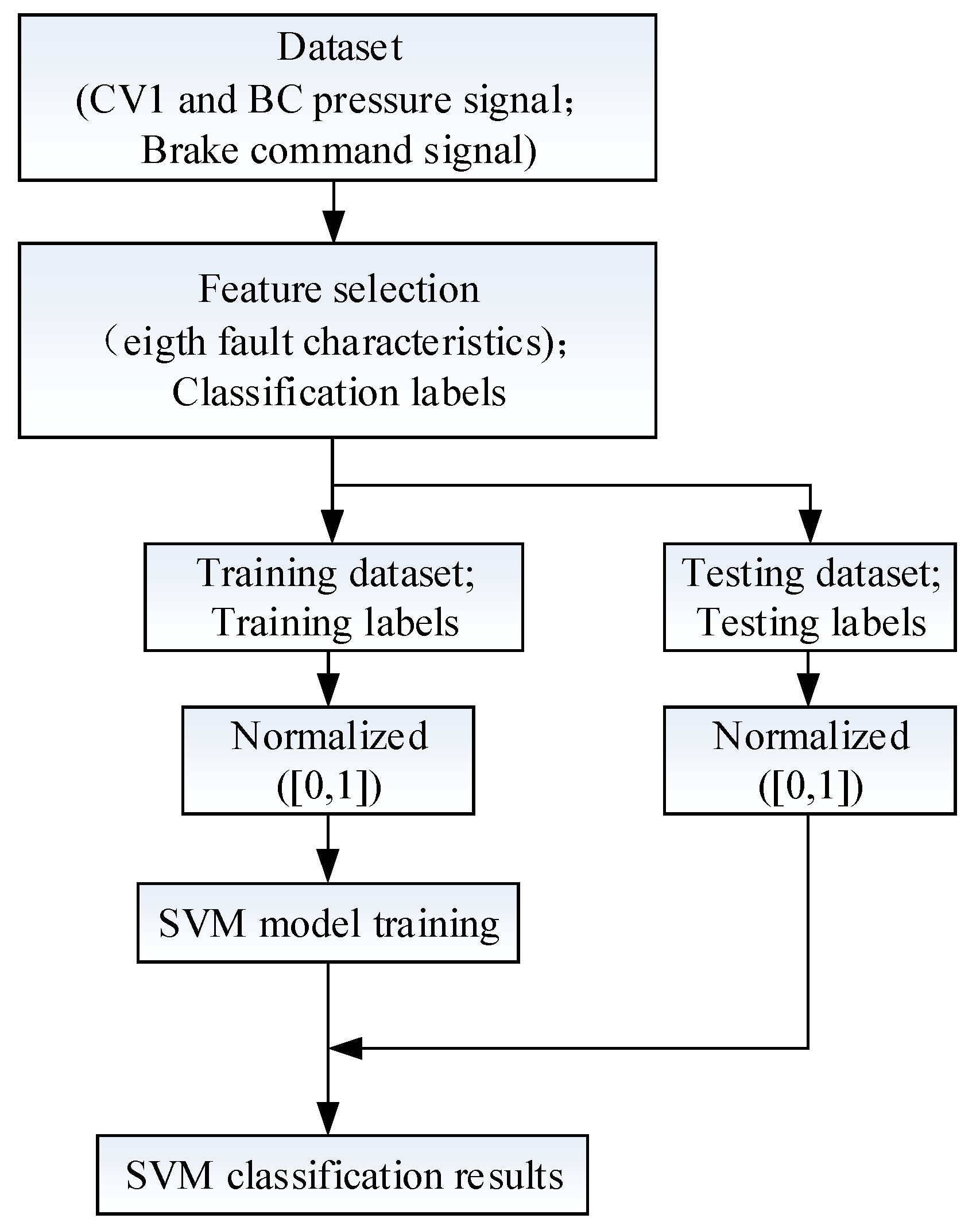
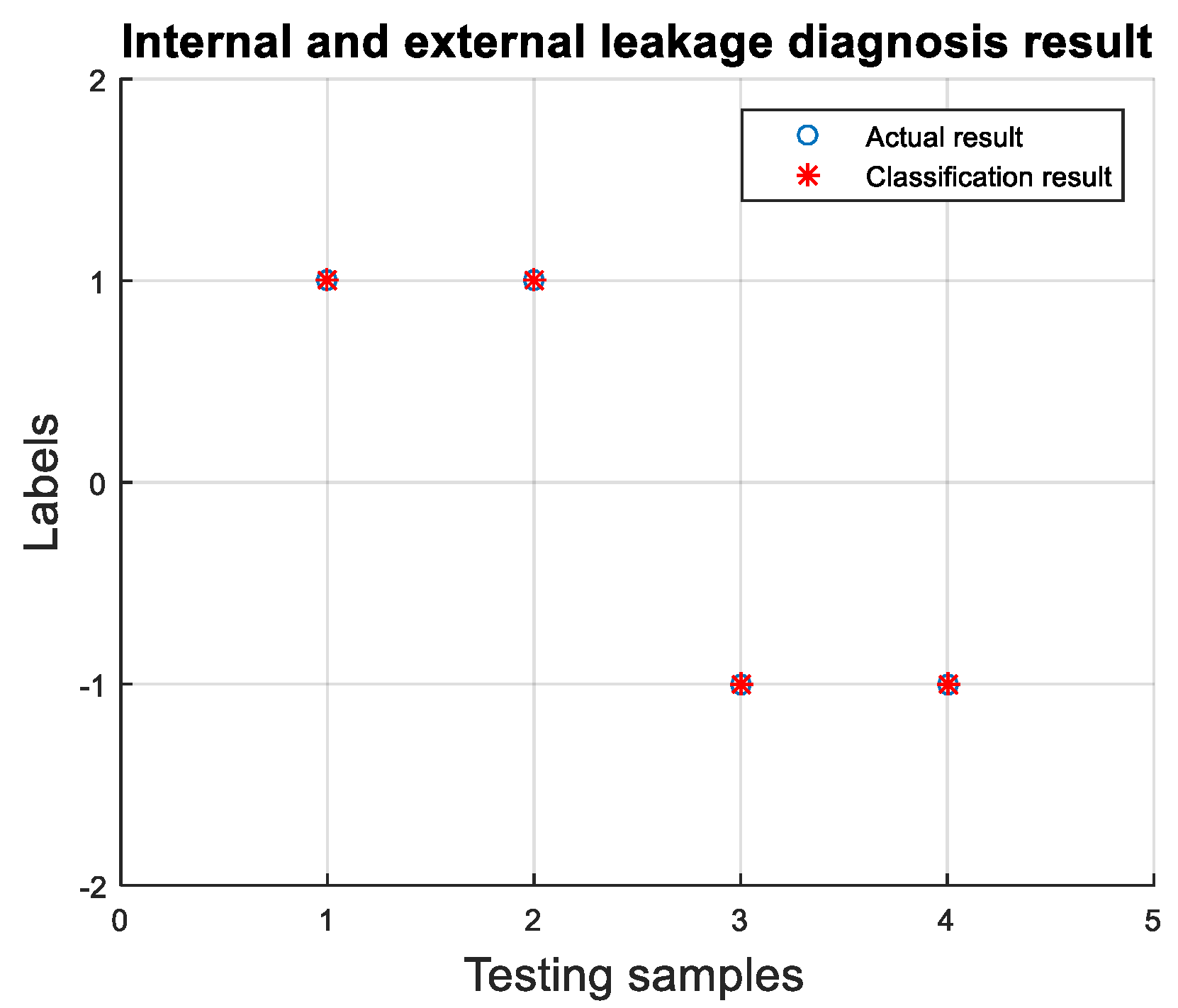
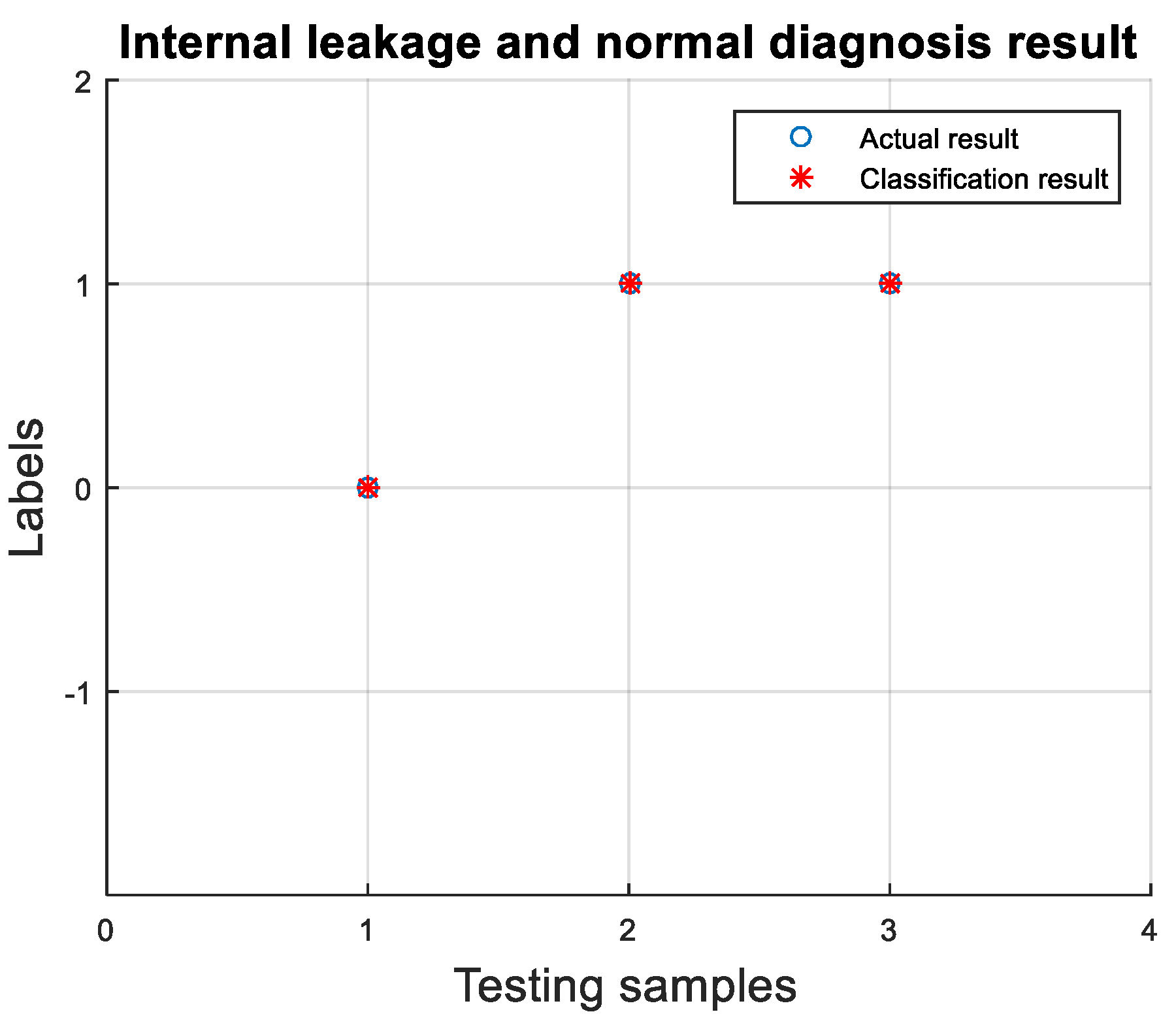
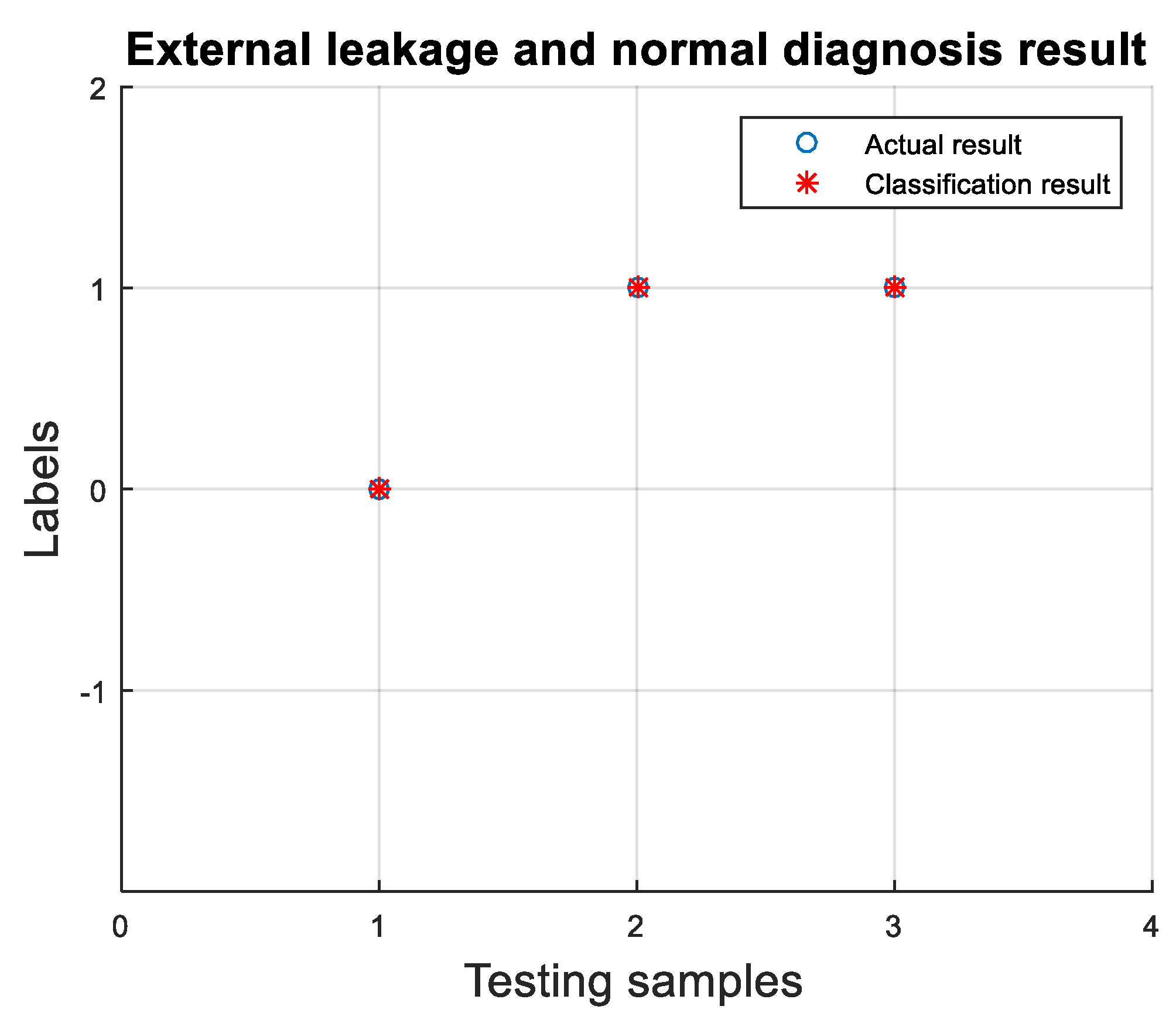
3.2. Internal and External Leakage Diagnosis Based on Support Vector Machine
3.2.1. Relay Valve Leakage Fault Characteristic Parameters
3.2.2. Support Vector Machine
4. Experiment Verification
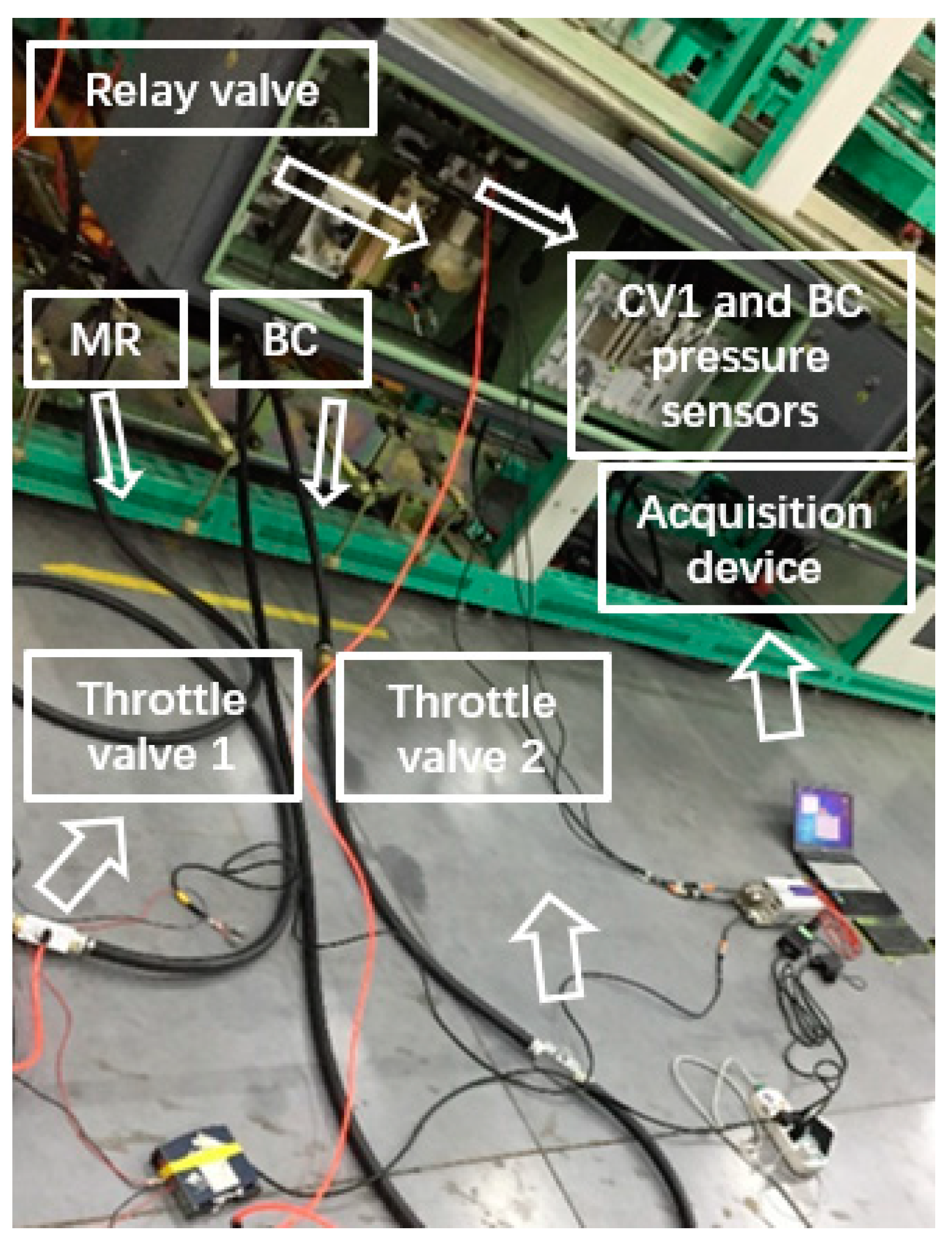
4.1. Fault Simulation and Sample Acquisition
4.2. Leakage Identification
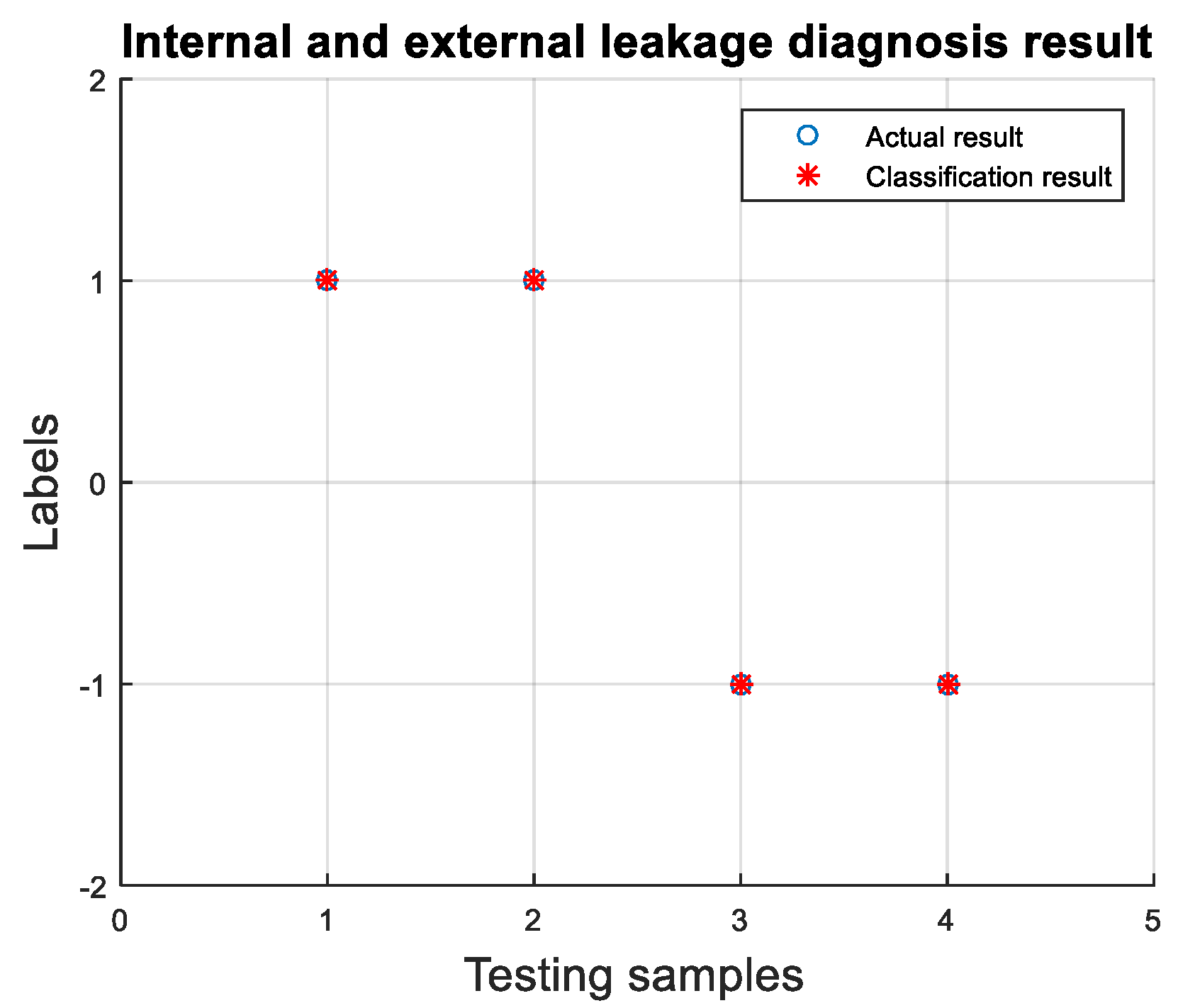
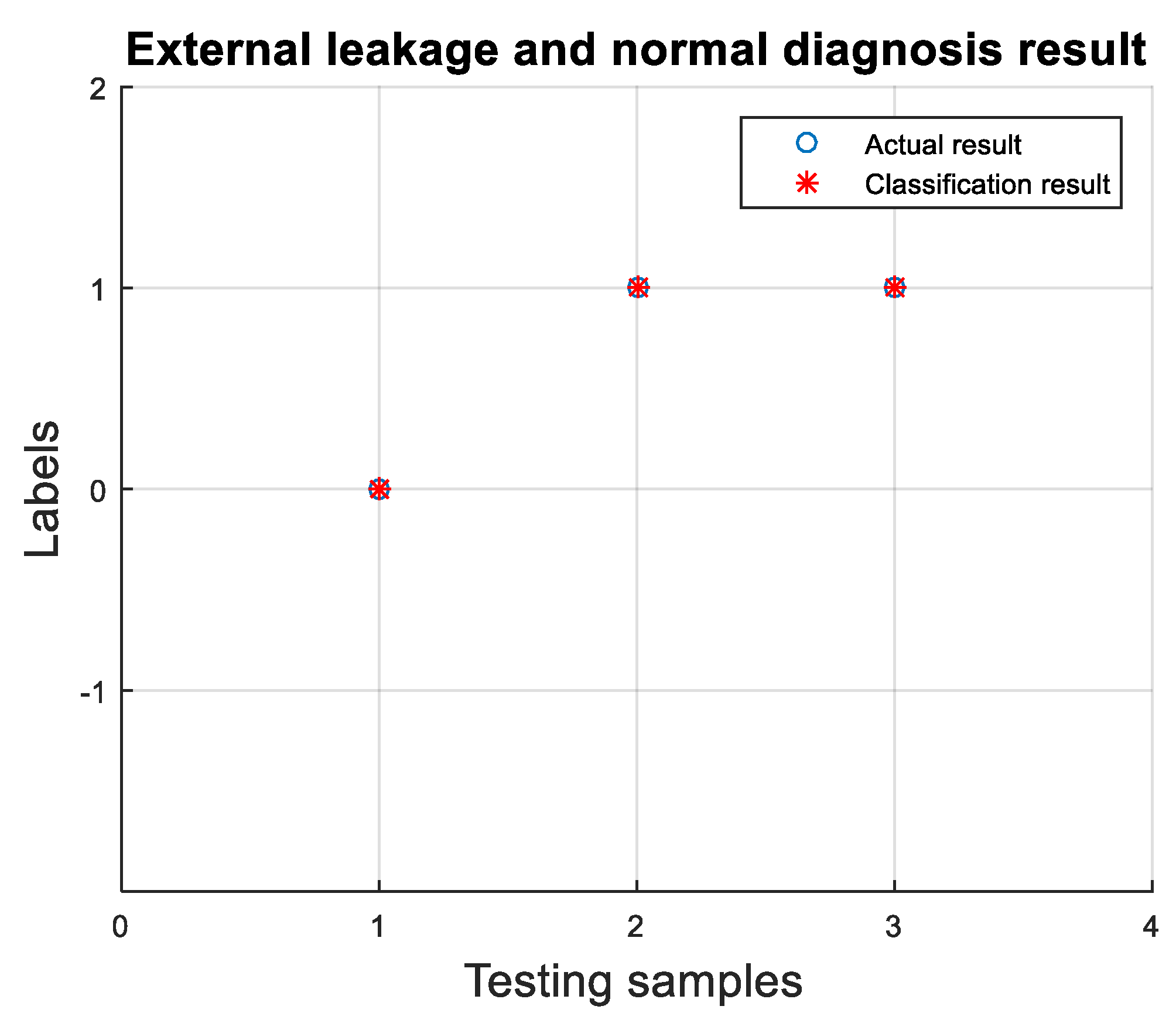
4.3. Leakage Diagnosis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, F.; Ma, L.; Zhu, X.-Y.; Niu, R. Simulation study on performance of relay valve for high-speed EMU brake system. Fluid Mach. 2013, 41, 43–46. [Google Scholar]
- Tian, C.; Cheng, M.; Pan, L.; Wu, M. Fault feature extraction of service air braking of subway train. J. Tongji Univ. Nat. Sci. Ed. 2014, 42, 84–90. [Google Scholar]
- Liu, Y.; Cheng, G.; Zhuang, G.; Wang, F. Redesign and analysis of relay valve for high-speed electric multiple unit braking system. Hydraul. Pneum. Seals 2015, 35, 42–45. [Google Scholar]
- Wu, M.; Tao, Z.; Tian, C.; Cheng, M. Fault feature analysis of service brake not releasing caused by relay valve leakage. Chin. J. Sci. Instrum. 2013, 34, 1864–1871. [Google Scholar]
- Wu, M. Research on Microcomputer-Controlled Direct Electropneumatic Brake System. Ph.D. Thesis, Tongji University, Shanghai, China, 2006. [Google Scholar]
- Zhu, H. Reliability Study on the Balance Valve of DA01 Train on Shanghai Metro Line 1. Ph.D. Thesis, Shanghai Jiaotong University, Shanghai, China, 2011. [Google Scholar]
- Wu, M.; Wang, X.; Tian, C. Reliability of relay valve of brake system for rail vehicles. J. Southwest Jiaotong Univ. 2009, 44, 365–369. [Google Scholar]
- Zhang, M. Faults and Preventive Measures of Train Braking System on Beijing Metro Line 13. Mod. Urban Rail Transit 2009, 12, 58–60. [Google Scholar]
- Huo, W. Failure Analysis and Solution of Flash Reporting Braking Not Releasing for CRH380AL EMUs. Oper. Maint. 2017, 14, 12–14. [Google Scholar]
- Tang, H.; Wu, Y. Fault diagnosis of pumping hydraulic system of concrete pump truck based on T.-S. fuzzy fault tree. Appl. Res. Comput. 2012, 29, 561–568. [Google Scholar]
- Tang, H.B.; Wu, Y.X.; Hua, G.J.; Ma, C.X. Fault Diagnosis of Internal Leakage in Hydraulic Cylinder Based on PCA and BP Neural Network. J. Cent. South. Univ. Nat. Sci. Ed. 2011, 42, 3709–3714. [Google Scholar]
- Narendra, K.S.; Parthasarathy, K. Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Netw. 1990, 1, 4–27. [Google Scholar] [CrossRef]
- Xuanyin, W.; Xiaoxiao, L.; Fushang, L. Analysis on oscillation in electro-hydraulic regulating system of steam turbine and fault diagnosis based on PSOBP. Expert Syst. Appl. 2010, 37, 3887–3892. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, Z.; Mu, Z.; Zhang, S. Research on the construction of fault diagnosis expert system for aircraft hydraulic system based on CLIPS. J. Nav. Aeronaut. Eng. Inst. 2011, 26, 45–48. [Google Scholar]
- Liu, J.; Li, Y.-F.; Zio, E. A SVM framework for fault detection of the braking system in a high speed train. Mech. Syst. Signal. Process. 2017, 87, 401–409. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Zio, E. A scalable fuzzy support vector machine for fault detection in transportation systems. Expert Syst. Appl. 2018, 102, 36–43. [Google Scholar] [CrossRef]
- Sun, J.; Ren, L.; Wu, Z.; Qi, H. Optimization on throttle hole of FD-1 relay valve of CRH2 EMU air braking system. Comput. Aided Eng. 2011, 20, 10–15. [Google Scholar]
- Ma, L.; Pang, S.; Wu, M.; Wang, F. Flow Characteristics Simulation Analysis on Relay Valve of CRH2 EMU. Fluid Mach. 2014, 42, 30–34. [Google Scholar]
- Hunag, M.-G.; Fan, S.-C.; Zheng, D.-Z.; Xing, W.W. Research progress of multi-sensor data fusion technology. Sens. Microsyst. 2010, 29, 5–9. [Google Scholar]
- Qiao, S.-J.; Han, N.; Zhu, X.-W.; Shu, H.-P. A Dynamic Trajectory Prediction Algorithm Based on Kalman Filter. Acta Electron. Sin. 2018, 46, 418–423. [Google Scholar]
- Wang, H.; Zhao, X.; Yang, D. Missile Vibration Fault Diagnosis Based on MSET and SPRT. Meas. Control. Technol. 2015, 34, 59–62. [Google Scholar]
- Zuo, J.-Y.; Ding, J.-X.; Peng, S.; Hu, G. Fault Feature Extraction of Relay Valve Leakage Based on Test for Standard EMU Brake System. In Proceedings of the 2017 2nd International Conference on Applied Mechanics and Mechatronics Engineering (AMME 2017), Shanghai, China, 26 September 2017; pp. 353–359. [Google Scholar]
- Liu, Z.; Yang, K.; Zhang, R.; Li, X.; Li, J. Fault diagnosis research for full hydraulic braking system of trackless tyred vehicle. Ind. Mine Autom. 2016, 42, 30–34. [Google Scholar]
- Sun, J.; Li, Y.; Yang, X. A Theoretical Framework for Fault Injection Research. Miniat. Microcomput. Syst. 1999, 20, 816–819. [Google Scholar]
- Niu, G.; Zhao, Y. Locomotive Brake System Fault Detection and Isolation Based on Bond Graph Model. J. Tongji Univ. Nat. Sci. Ed. 2015, 43, 894–899. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Leakage Mode | Gas Flow Direction | Impact | Causes |
|---|---|---|---|
| Internal leakage | MR to BC | The output pressure is higher, the braking release is slow, and even braking does not release | Supply valve assembly vulcanizing parts aging; return spring aging; supply valve stuck |
| External leakage | BC to BC-EX (external atmosphere) | The output pressure is lower; too low will trigger abnormal emergency braking | Supply valve assembly vulcanizing parts aging; supply valve stuck |
| Code | Leakage Fault Characteristic Parameters | Definition |
|---|---|---|
| A | CV1 steady-state pressure | The CV1 pressure average of the holding phase |
| B | BC steady-state pressure | The BC pressure average of the holding phase |
| C | Following error | Difference between BC steady-state pressure and CV1 steady-state pressure |
| D | Maximum | After the brake command is triggered, the maximum value of the BC pressure during the pressure holding phase |
| E | Minimum | After the brake command is triggered, the minimum value of the BC pressure during the pressure holding phase |
| F | Degree of volatility | After the brake command is triggered, the standard deviation of the BC pressure during the pressure holding phase |
| G | Response time | Time required for BC pressure to rise from 10% to 90% of target pressure |
| H | Delayed releasing time | From when the brake command is cancelled to when the BC pressure drops to 40 kPa |
| Leakage Mode | Fault Injection Method |
|---|---|
| internal leakage | By connecting a throttle valve 1 between the air supply port of the relay valve and the output port of the relay valve |
| external leakage | By connecting a throttle valve 2 between the relay valve output port and the atmosphere |
| Number | Failure Mode | A (kPa) | B (kPa) | C (kPa) | D (kPa) | E (kPa) | F | G (s) | H (s) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Normal | 254.788 | 237.425 | −17.3624 | 239.726 | 236.28 | 0.58 | 0.77 | 2.277 |
| 2 | Normal | 254.596 | 237.233 | −17.3628 | 239.495 | 236.079 | 0.58 | 0.767 | 2.288 |
| 3 | Normal | 254.643 | 237.361 | −17.2819 | 239.409 | 236.126 | 0.53 | 0.772 | 2.277 |
| 4 | Normal | 254.589 | 237.325 | −17.2635 | 239.583 | 236.305 | 0.58 | 0.765 | 2.277 |
| 5 | Normal | 254.613 | 237.397 | −17.2157 | 239.642 | 236.32 | 0.57 | 0.772 | 2.299 |
| 6 | Internal | 257.242 | 250.324 | −6.91807 | 252.409 | 244.427 | 1.03 | 0.759 | 2.498 |
| 7 | Internal | 257.082 | 250.154 | −6.92832 | 251.97 | 244.389 | 1 | 0.766 | 2.523 |
| 8 | Internal | 257.068 | 250.1 | −6.96781 | 251.945 | 243.958 | 1.12 | 0.762 | 2.544 |
| 9 | Internal | 257.054 | 250.064 | −6.98958 | 251.988 | 244.325 | 1.01 | 0.769 | 2.581 |
| 10 | Internal | 256.893 | 249.886 | −7.00637 | 251.914 | 244.258 | 1.06 | 0.768 | 2.546 |
| 11 | Internal | 257.102 | 250.12 | −6.98136 | 252.063 | 244.732 | 1.01 | 0.781 | 2.53 |
| 12 | Internal | 256.965 | 250.025 | −6.94063 | 251.832 | 244.736 | 0.94 | 0.773 | 2.564 |
| 13 | Internal | 256.875 | 249.966 | −6.90872 | 251.957 | 244.344 | 0.99 | 0.768 | 2.521 |
| 14 | Internal | 256.962 | 250.029 | −6.93281 | 251.855 | 244.497 | 1.04 | 0.765 | 2.539 |
| 15 | Internal | 256.75 | 249.804 | −6.94583 | 251.717 | 243.955 | 1.03 | 0.764 | 2.548 |
| 16 | External | 254.824 | 236.758 | −18.0662 | 239.408 | 235.583 | 0.6 | 0.769 | 2.257 |
| 17 | External | 254.665 | 236.528 | −18.1379 | 239.082 | 235.474 | 0.55 | 0.774 | 2.248 |
| 18 | External | 254.507 | 236.307 | −18.2 | 238.991 | 235.025 | 0.57 | 0.772 | 2.271 |
| 19 | External | 254.397 | 236.225 | −18.1716 | 238.961 | 235.139 | 0.56 | 0.769 | 2.256 |
| 20 | External | 254.477 | 236.324 | −18.1534 | 238.859 | 235.114 | 0.58 | 0.774 | 2.273 |
| 21 | External | 254.48 | 236.407 | −18.0735 | 238.808 | 235.263 | 0.58 | 0.774 | 2.241 |
| 22 | External | 254.437 | 236.337 | −18.1001 | 239.041 | 235.127 | 0.6 | 0.776 | 2.281 |
| 23 | External | 254.342 | 236.157 | −18.1849 | 238.591 | 235.112 | 0.53 | 0.796 | 2.257 |
| 24 | External | 254.407 | 236.308 | −18.0993 | 239.136 | 235.168 | 0.56 | 0.773 | 2.255 |
| 25 | External | 254.673 | 236.703 | −17.97 | 239.59 | 235.547 | 0.58 | 0.778 | 2.282 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, J.; Ding, J.; Feng, F. Latent Leakage Fault Identification and Diagnosis Based on Multi-Source Information Fusion Method for Key Pneumatic Units in Chinese Standard Electric Multiple Units (EMU) Braking System. Appl. Sci. 2019, 9, 300. https://doi.org/10.3390/app9020300
Zuo J, Ding J, Feng F. Latent Leakage Fault Identification and Diagnosis Based on Multi-Source Information Fusion Method for Key Pneumatic Units in Chinese Standard Electric Multiple Units (EMU) Braking System. Applied Sciences. 2019; 9(2):300. https://doi.org/10.3390/app9020300
Chicago/Turabian StyleZuo, Jianyong, Jingxian Ding, and Furen Feng. 2019. "Latent Leakage Fault Identification and Diagnosis Based on Multi-Source Information Fusion Method for Key Pneumatic Units in Chinese Standard Electric Multiple Units (EMU) Braking System" Applied Sciences 9, no. 2: 300. https://doi.org/10.3390/app9020300