Dynamic State Estimation for Synchronous Machines Based on Adaptive Ensemble Square Root Kalman Filter

 ,
,  and
and
Abstract
:1. Introduction
- Proposing a novel, robust AEnSRF method applicable for measurement noise estimation.
- The proposed robust AEnSRF method is based on the combination between the EnSRF and the Sage–Husa algorithm.
- The proposed AEnSRF does not need to interfere with the measured values, avoiding the problem of underestimating the analysis error covariance in EnKF and improving the filtering precision.
- The suggested technique utilizes Sage–Husa algorithm to adjust the covariance matrices of measurement noise dynamically and filter it when there is a deviation in measurement noise.
- The proposed method mitigates the adverse influence of noise error on the filtering result.
- The proposed method has a higher filtering precision than the conventional EnKF and a stronger robustness to noise.
2. Generator Dynamic State Estimation Model
2.1. Mathematical Model of Dynamic State Estimation
2.2. Equation of Measurement and State Estimation
2.3. Error Analysis
3. Adaptive Ensemble Square Root Kalman Filter
3.1. Ensemble Kalman Filter
3.2. Ensemble Square Root Kalman Filter
3.3. Sage–Husa Algorithm
3.4. Adaptive Ensemble Square Root Kalman Filter
- (1)
- Initialization: The initial value of generator rotor angular velocity is 1. The initial value of generator power angle, electromagnetic power and mechanical power is its steady-state operation value.
- (2)
- The initial value of the state set with the number of set elements is generated by Monte Carlo method, and the initial estimation error covariance matrix is taken as the unit matrix.
- (3)
- State prediction:
- (4)
- Calculating Kalman gain:
- (5)
- Calculate the measurement noise covariance:
- (6)
- Calculate the mean deviation gain of the updated set:
- (7)
- State update:
4. Case Study
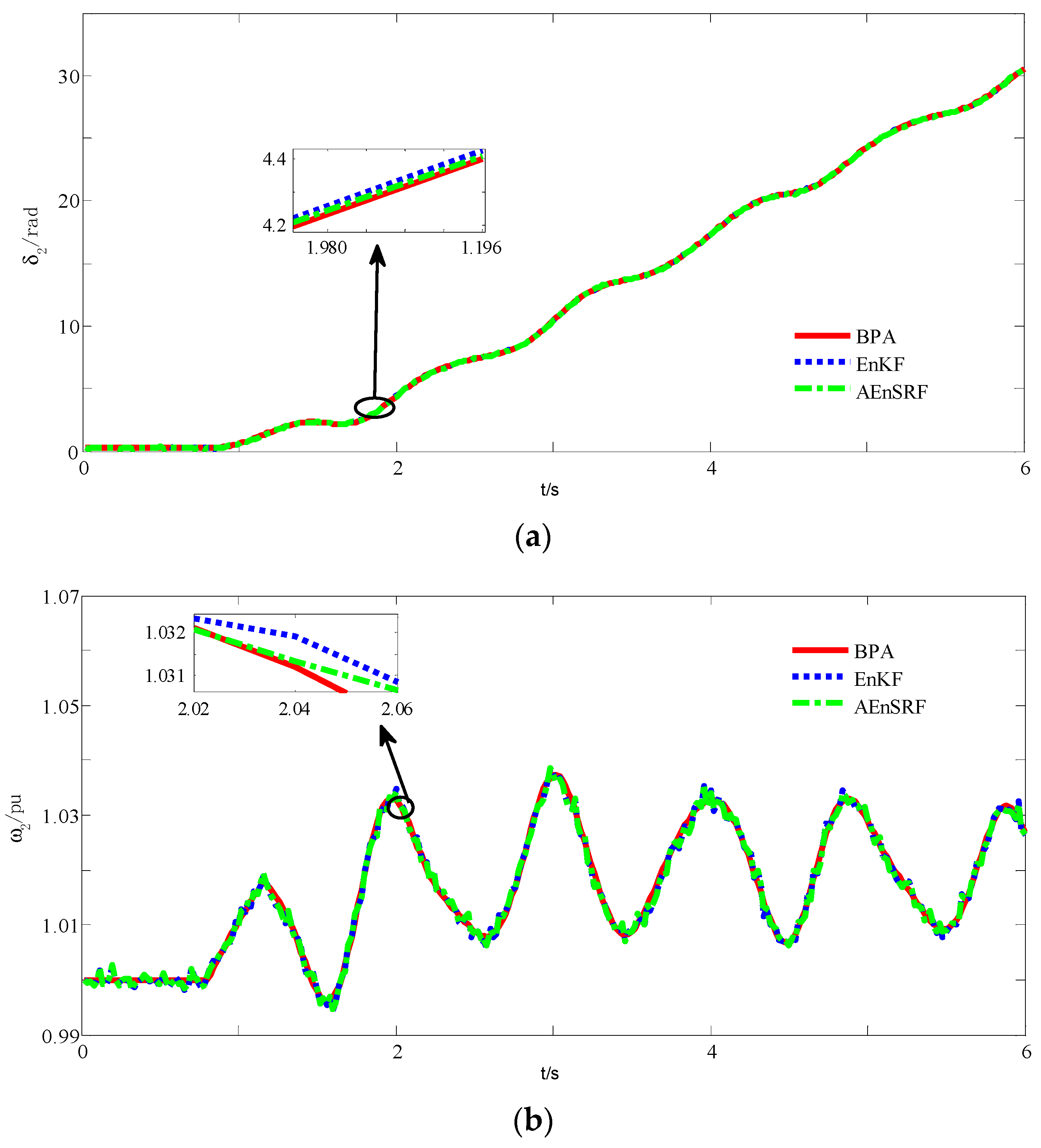
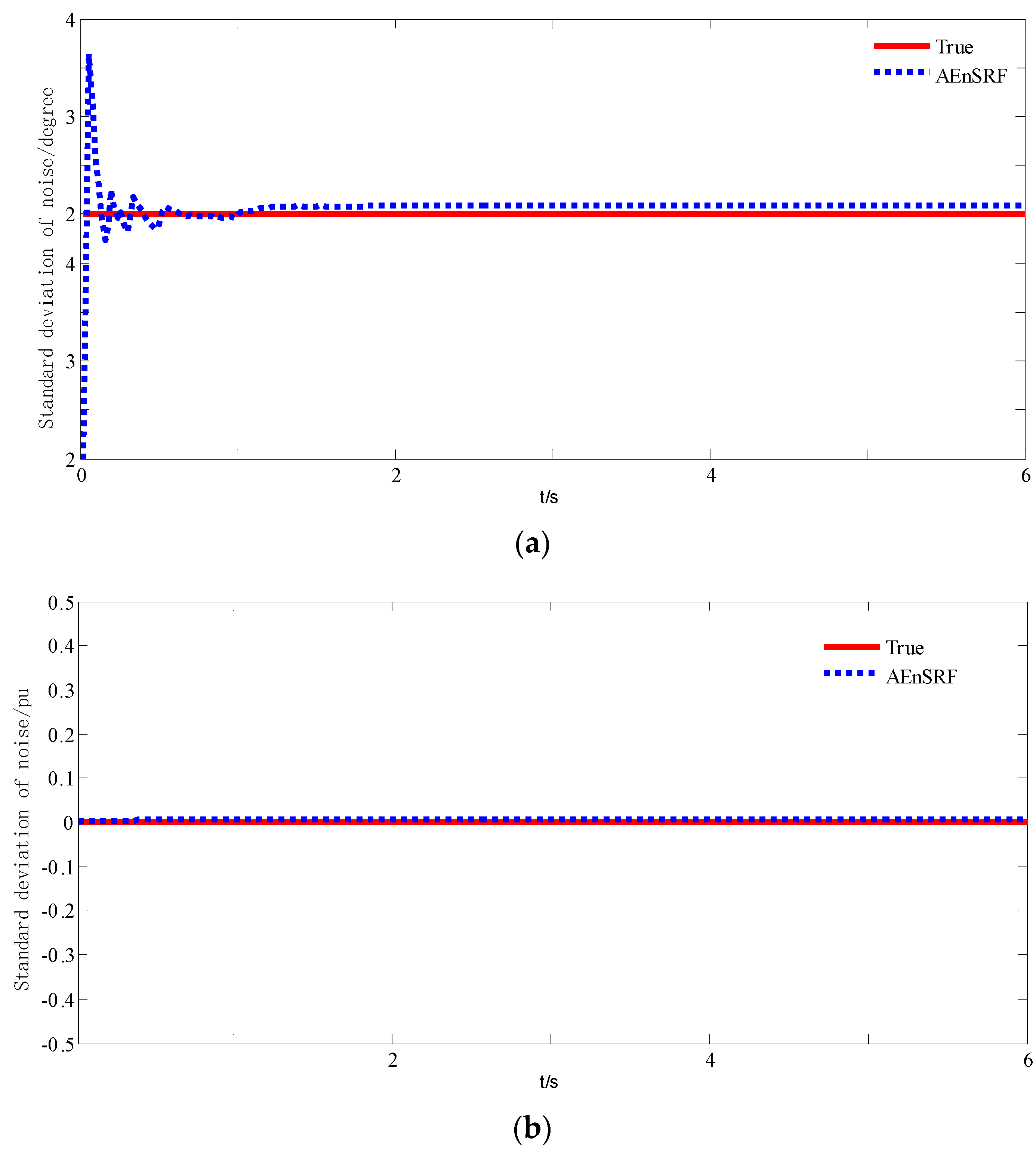
4.1. Basic Test Analysis
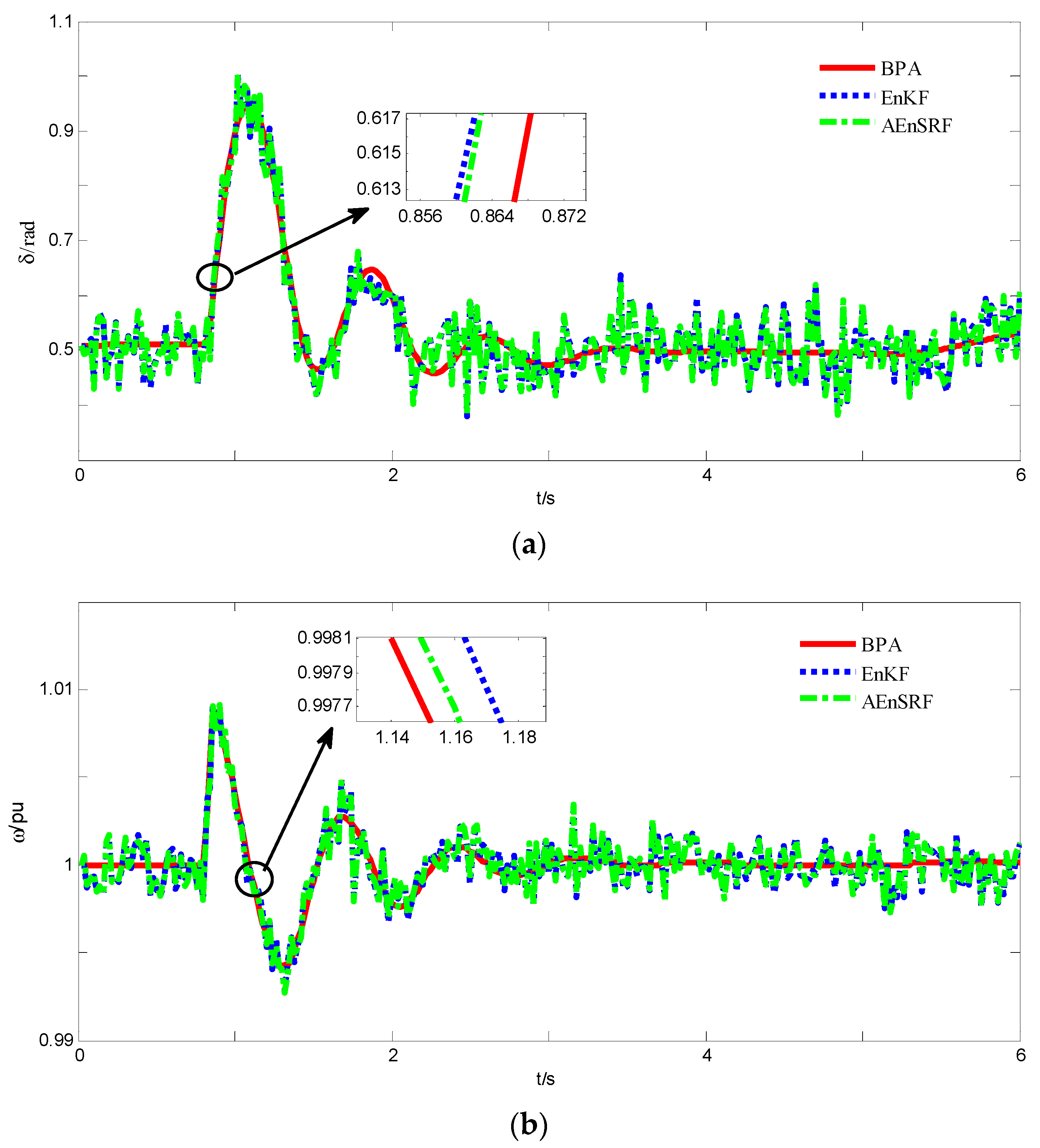
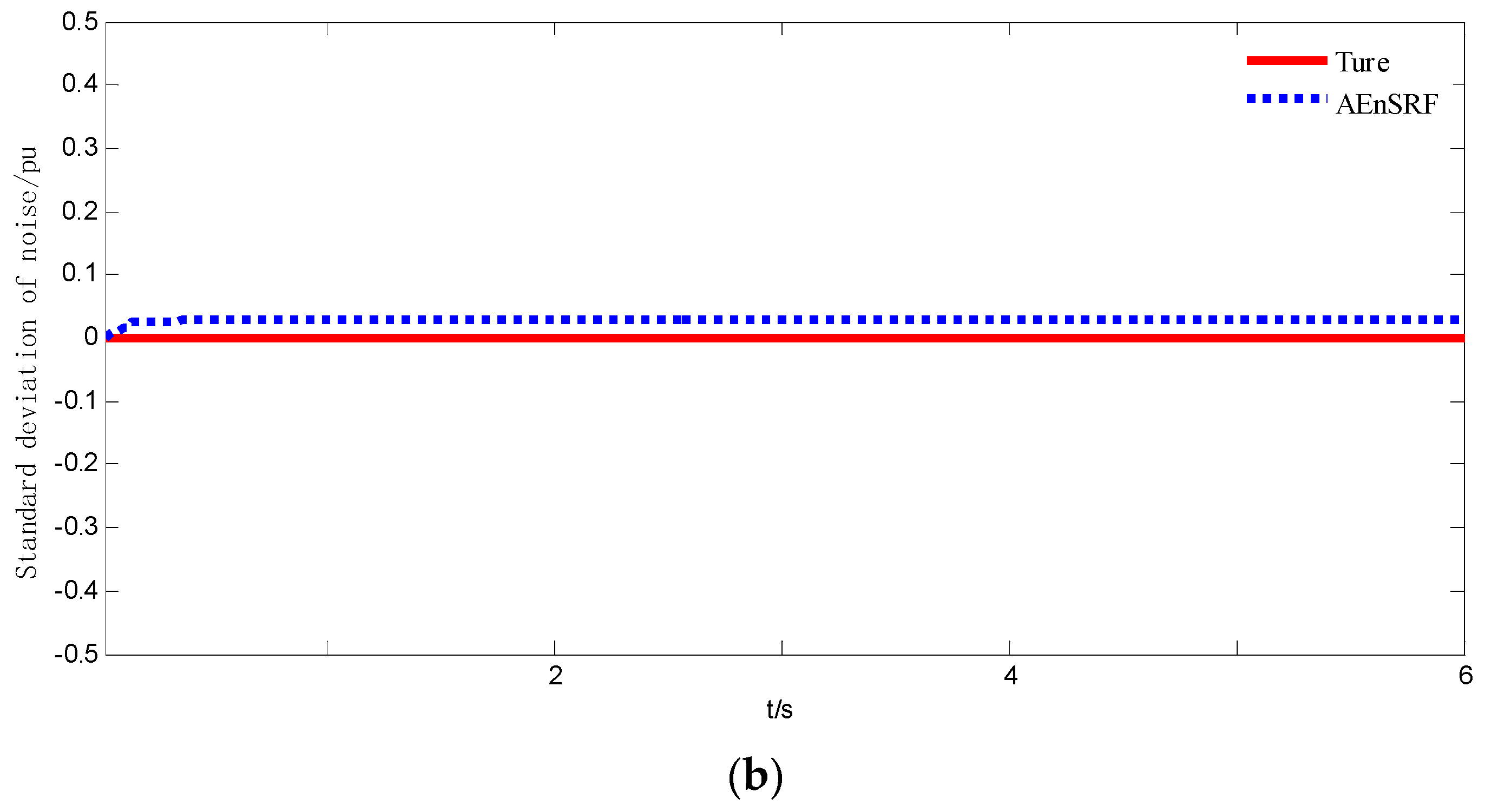
4.2. Noise Measurement and Analysis on the IEEE 9-Bus System
4.3. Noise Measurement and Analysis on a Real Power System
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Y.; Sun, Y.; Dinavahi, V.; Wang, K.; Nan, D. Robust dynamic state estimation of power system with model uncertainties based on adaptive unscented H infinity filter. IET Gener. Transm. Distrib. 2019, 13, 2455–2463. [Google Scholar] [CrossRef]
- De La Ree, J.; Centeno, V.; Thorp, J.S.; Phadke, A.G. Synchronized phasor measurement applications in power systems. IEEE Trans. Smart Grid 2010, 1, 20–27. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, Y.; Dinavahi, V. Robust forecasting-aided state estimation for power system against uncertainties. IEEE Trans. Power Syst. 2019. [Google Scholar] [CrossRef]
- Singh, H.; Alvarado, L.; Liu, W. Constrained LAV state estimation using penalty functions. IEEE Trans. Power Syst. 2002, 12, 383–388. [Google Scholar] [CrossRef]
- Mili, L.; Cheniae, M.; Rousseeuw, P. Robust state estimation of electric power systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 41, 349–358. [Google Scholar] [CrossRef]
- Ghahremani, E.; Kamwa, I. Dynamic state estimation in power system by applying the extended Kalman filter with unknown inputs to phasor measurements. IEEE Trans. Power Syst. 2011, 26, 2556–2566. [Google Scholar] [CrossRef]
- Wang, S.; Gao, W.; Meliopoulos, A. An alternative method for power system dynamic state estimation based on unscented transform. IEEE Trans. Power Syst. 2012, 27, 942–950. [Google Scholar] [CrossRef]
- Qi, J.; Sun, K.; Wang, J.; Liu, H. Dynamic state estimation for multi-machine power system by unscented Kalman filter with enhanced numerical stability. IEEE Trans. Smart Grid 2018, 9, 1184–1196. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1251–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Qi, J.; Chen, L. Robust cubature Kalman filter for dynamic state estimation of synchronous machines under unknown measurement noise statistics. IEEE Access 2019, 7, 29139–29148. [Google Scholar] [CrossRef]
- Ai, M.; Sun, Y.; Lv, X. Dynamic state estimation for synchronous machines based on interpolation H∞ extended Kalman filter. In Proceedings of the IEEE 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018. [Google Scholar]
- Esmaeil, G.; Innocent, K. Online state estimation of a synchronous generator using unscented Kalman filter from phasor measurements units. IEEE Trans. Energy Convers. 2011, 26, 1099–1108. [Google Scholar]
- Gopinath, G.; Shyama, P. Sensorless control of permanent magnet synchronous motor using square-root cubature Kalman filter. In Proceedings of the IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016. [Google Scholar]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. Ocean. 1994, 106, 10143–10162. [Google Scholar] [CrossRef]
- Huang, R.; Diao, R.; Li, Y.; Sanchez-Gasca, J.; Huang, Z.; Thomas, B.; Etingov, P.; Kincic, S.; Wang, S.; Fan, R.; et al. Calibrating parameters of power system stability models using advanced ensemble Kalman filter. IEEE Trans. Power Syst. 2018, 33, 2895–2905. [Google Scholar] [CrossRef]
- Lee, W.; Gim, J.; Chen, M.; Wang, S.; Li, R. Development of a real-time power system dynamic performance monitoring system. IEEE Trans. Ind. Appl. 1997, 33, 1055–1060. [Google Scholar]
- Gillijns, S.; Mendoza, O.B.; Chandrasekar, J.; De Moor, B.L.R.; Bernstein, D.S.; Ridley, A. What is the ensemble Kalman filter and how well does it work? In Proceedings of the IEEE American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Kotecha, J.; Djuric, P. Gaussian particle filtering. IEEE Trans. Signal Process. 2003, 51, 2592–2601. [Google Scholar] [CrossRef]
- Fan, R.; Huang, R.; Diao, R. Gaussian mixture model-based ensemble Kalman filter for machine parameter calibration. IEEE Trans. Energy Convers. 2018, 33, 1597–1599. [Google Scholar] [CrossRef]
- Fan, R.; Liu, Y.; Huang, R.; Diao, R.; Wang, S. Precise fault location on transmission lines using ensemble Kalman filter. IEEE Trans. Power Del. 2018, 33, 3252–3255. [Google Scholar] [CrossRef]
- Burgers, G.; Peter, J.; Evensen, G. Analysis scheme in the ensemble Kalman filter. Mon. Weather Rev. 1998, 126, 1719–1724. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Ensemble data assimilation without perturbed observations. Mon. Weather Rev. 2003, 130, 1913–1924. [Google Scholar] [CrossRef]
- Tippett, M.K.; Anderson, J.L.; Bishop, C.H.; Hamill, T.M.; Whitaker, J.S. Ensemble square root filters. Mon. Weather Rev. 2003, 131, 1485–1490. [Google Scholar] [CrossRef]
- Zhu, Z.; Liu, S.; Zhang, B. An improved Sage-Husa adaptive filtering algorithm. In Proceedings of the IEEE 31st Chinese Control Conference, Hefei, China, 25–27 July 2012. [Google Scholar]
- Wang., Y.; Sun, Y.; Dinavahi, V.; Cao, S.; Hou, D. Adaptive robust cubature Kalman filter for power system dynamic state estimation against outliers. IEEE Access 2019, 7, 105872–105881. [Google Scholar] [CrossRef]
- Deng, F.; Chen, J.; Chen, C. Adaptive unscented Kalman filter for parameter and state estimation of nonlinear high-speed objects. J. Syst. Eng. Electron. 2013, 24, 655–665. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator Number | Algorithm | /rad | /pu |
|---|---|---|---|
| G1 | EnKF | 0.0345 | 9.7396 |
| AEnSRF | 0.0329 | 9.1950 | |
| G2 | EnKF | 0.0346 | 10.000 |
| AEnSRF | 0.0330 | 9.6680 | |
| G3 | EnKF | 0.0354 | 11.000 |
| AEnSRF | 0.0344 | 10.000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nan, D.; Wang, W.; Wang, K.; Mahfoud, R.J.; Haes Alhelou, H.; Siano, P. Dynamic State Estimation for Synchronous Machines Based on Adaptive Ensemble Square Root Kalman Filter. Appl. Sci. 2019, 9, 5200. https://doi.org/10.3390/app9235200
Nan D, Wang W, Wang K, Mahfoud RJ, Haes Alhelou H, Siano P. Dynamic State Estimation for Synchronous Machines Based on Adaptive Ensemble Square Root Kalman Filter. Applied Sciences. 2019; 9(23):5200. https://doi.org/10.3390/app9235200
Chicago/Turabian StyleNan, Dongliang, Weiqing Wang, Kaike Wang, Rabea Jamil Mahfoud, Hassan Haes Alhelou, and Pierluigi Siano. 2019. "Dynamic State Estimation for Synchronous Machines Based on Adaptive Ensemble Square Root Kalman Filter" Applied Sciences 9, no. 23: 5200. https://doi.org/10.3390/app9235200