Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture



Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Sites
2.2. Remote Sensing Measurements
2.2.1. UAV Platform and Payload
2.2.2. Flight Survey
3. UAV Image Processing
3.1. Multispectral Data Processing
3.2. Thermal Data Processing
3.3. RGB Data Processing
4. Results and Discussion
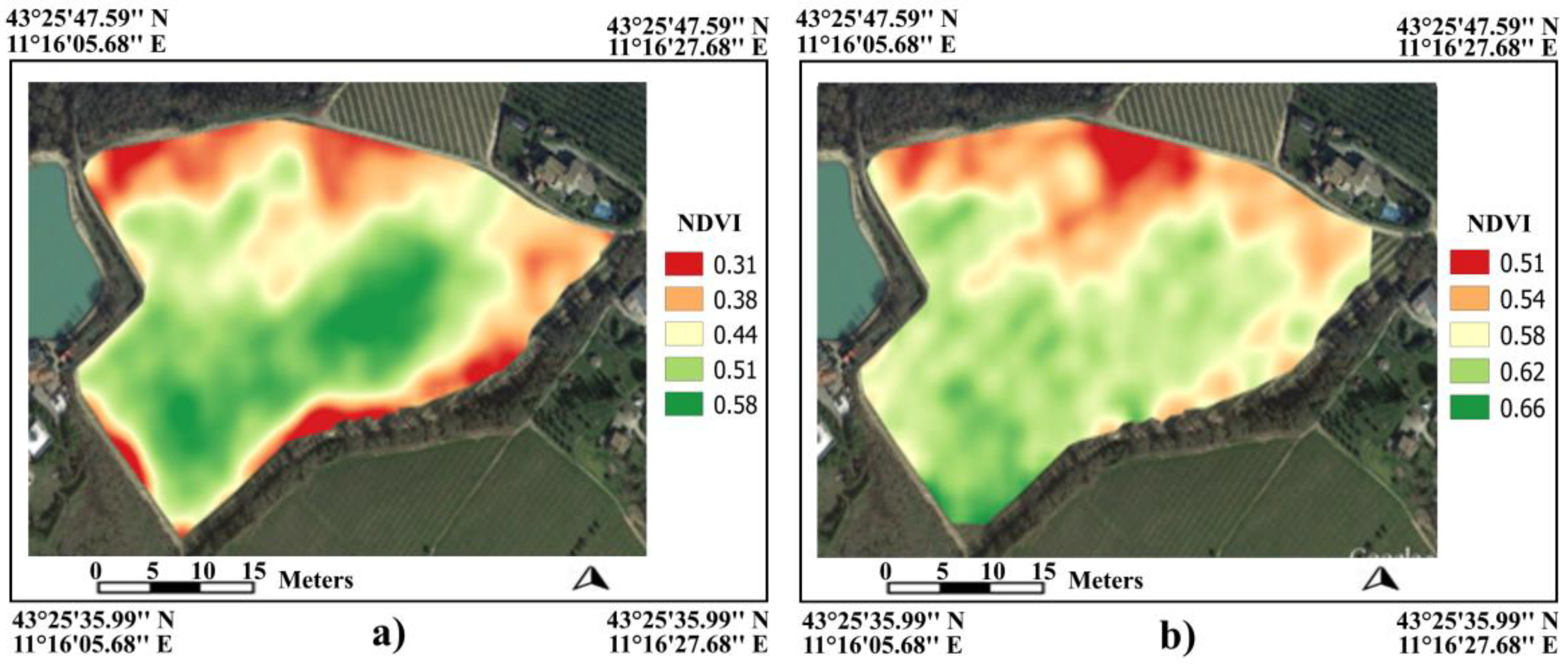
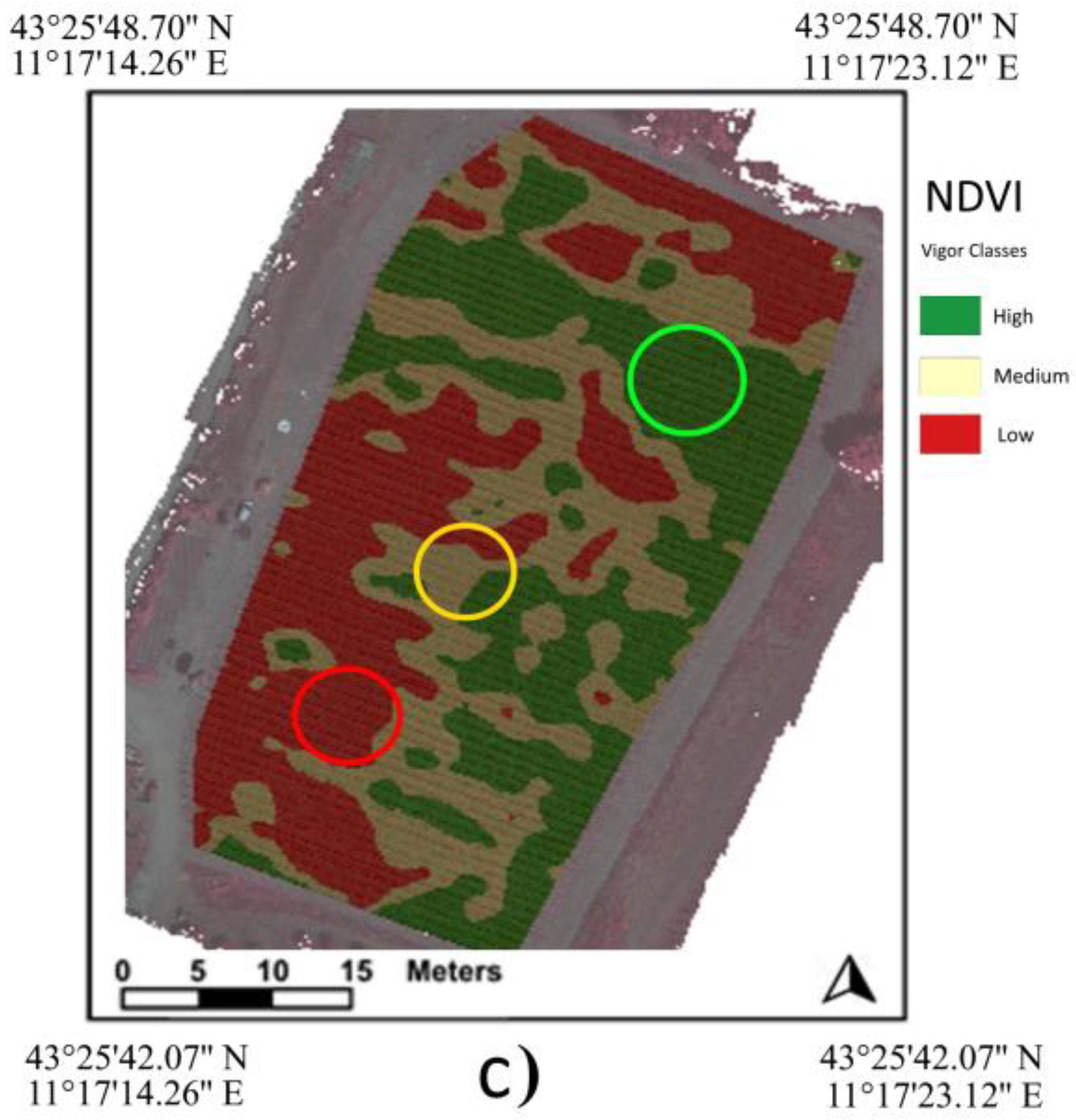
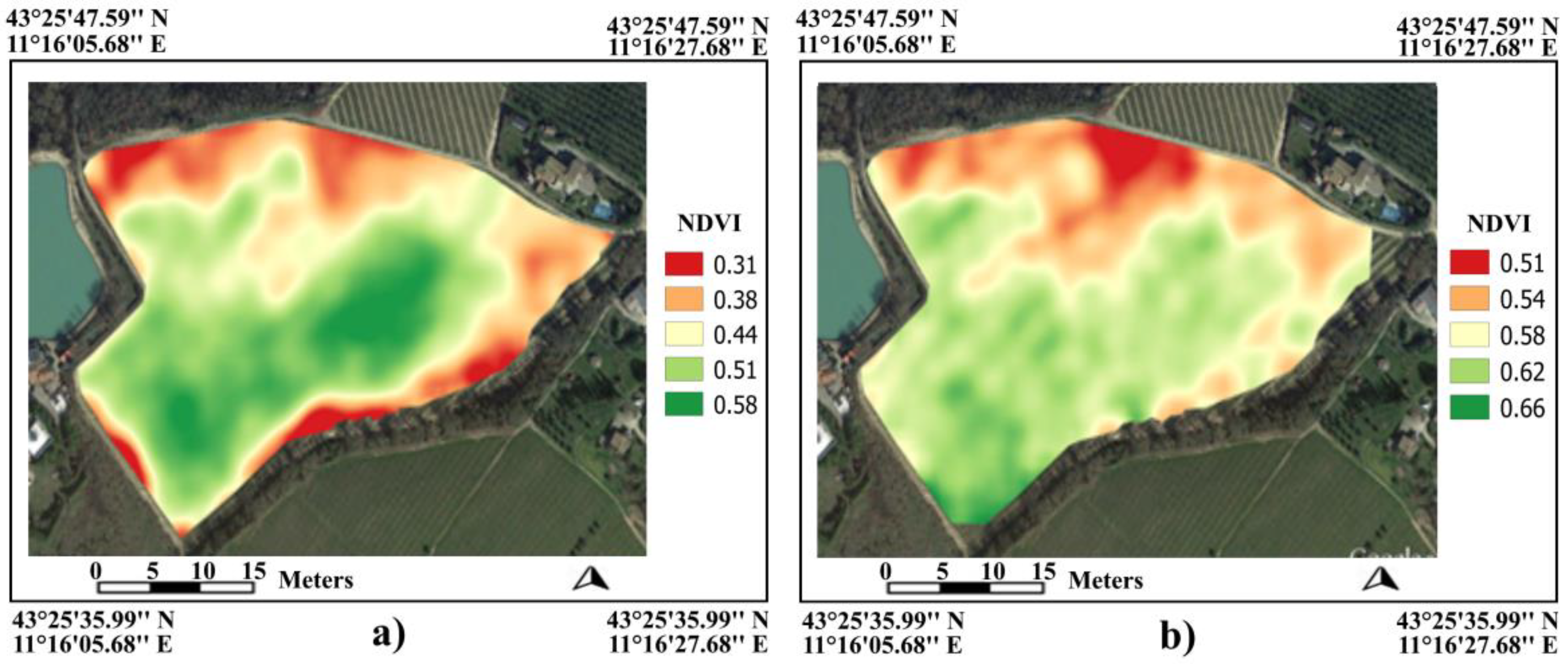
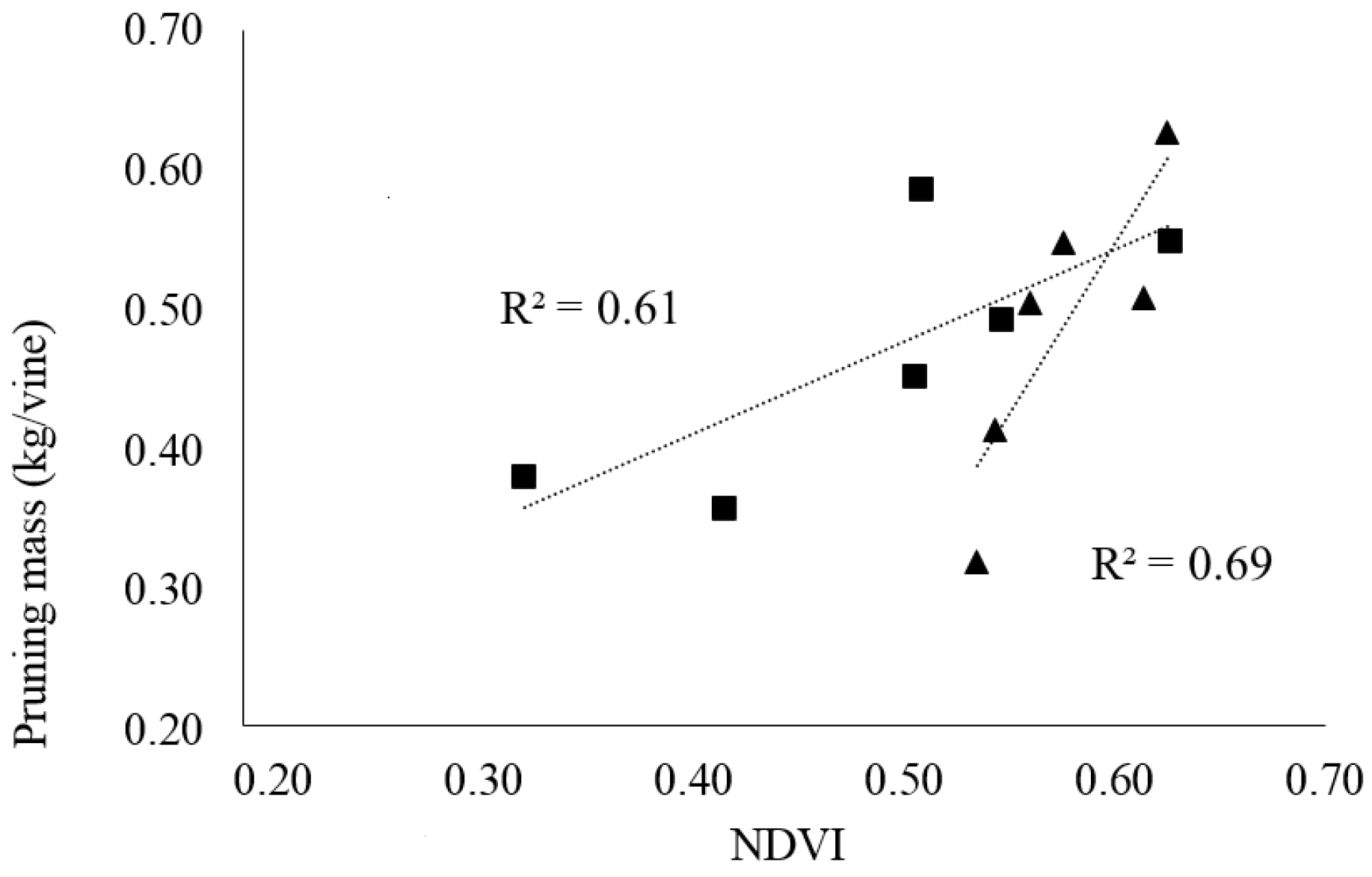
4.1. In-Field Vigor Variability
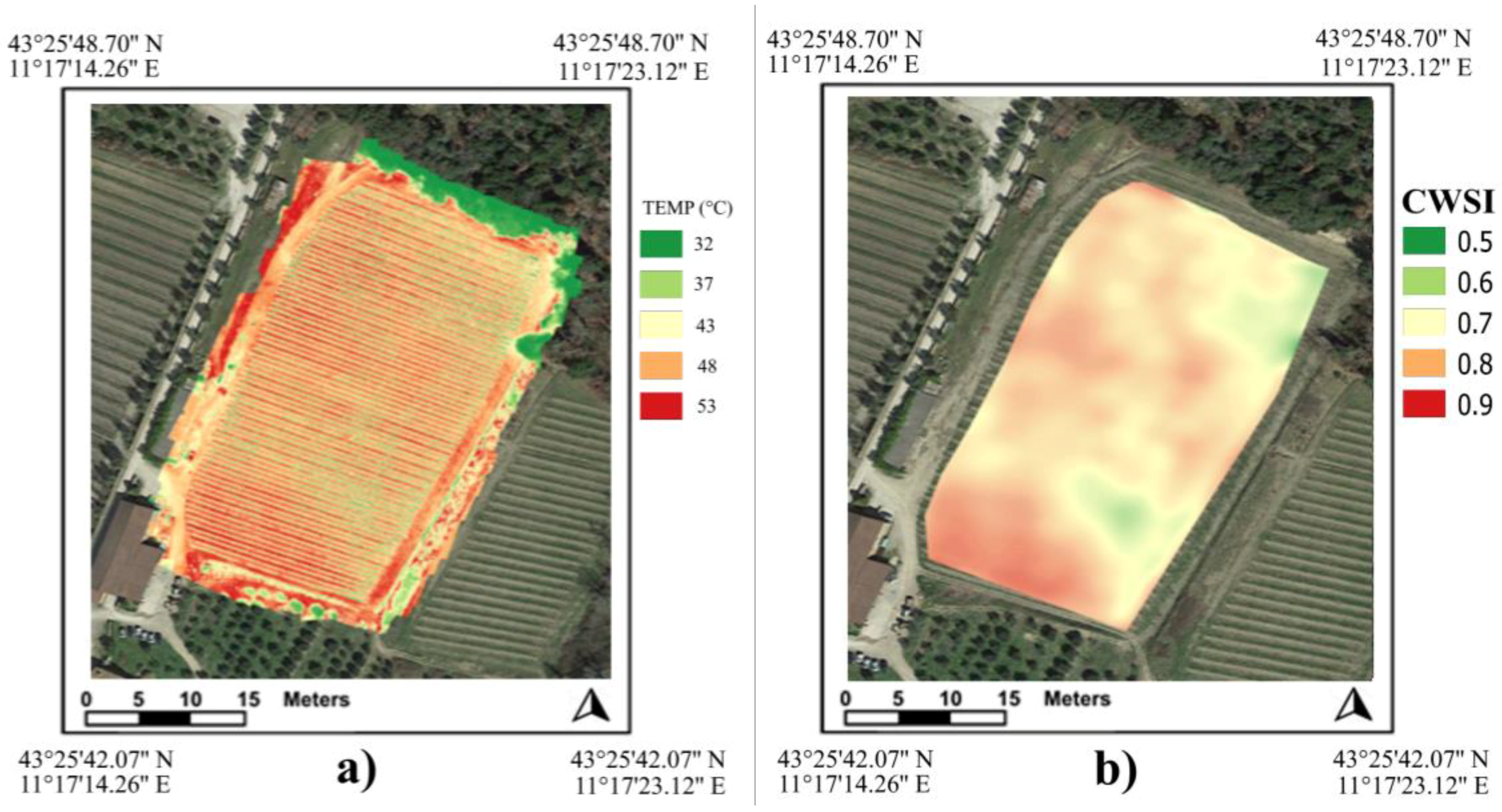
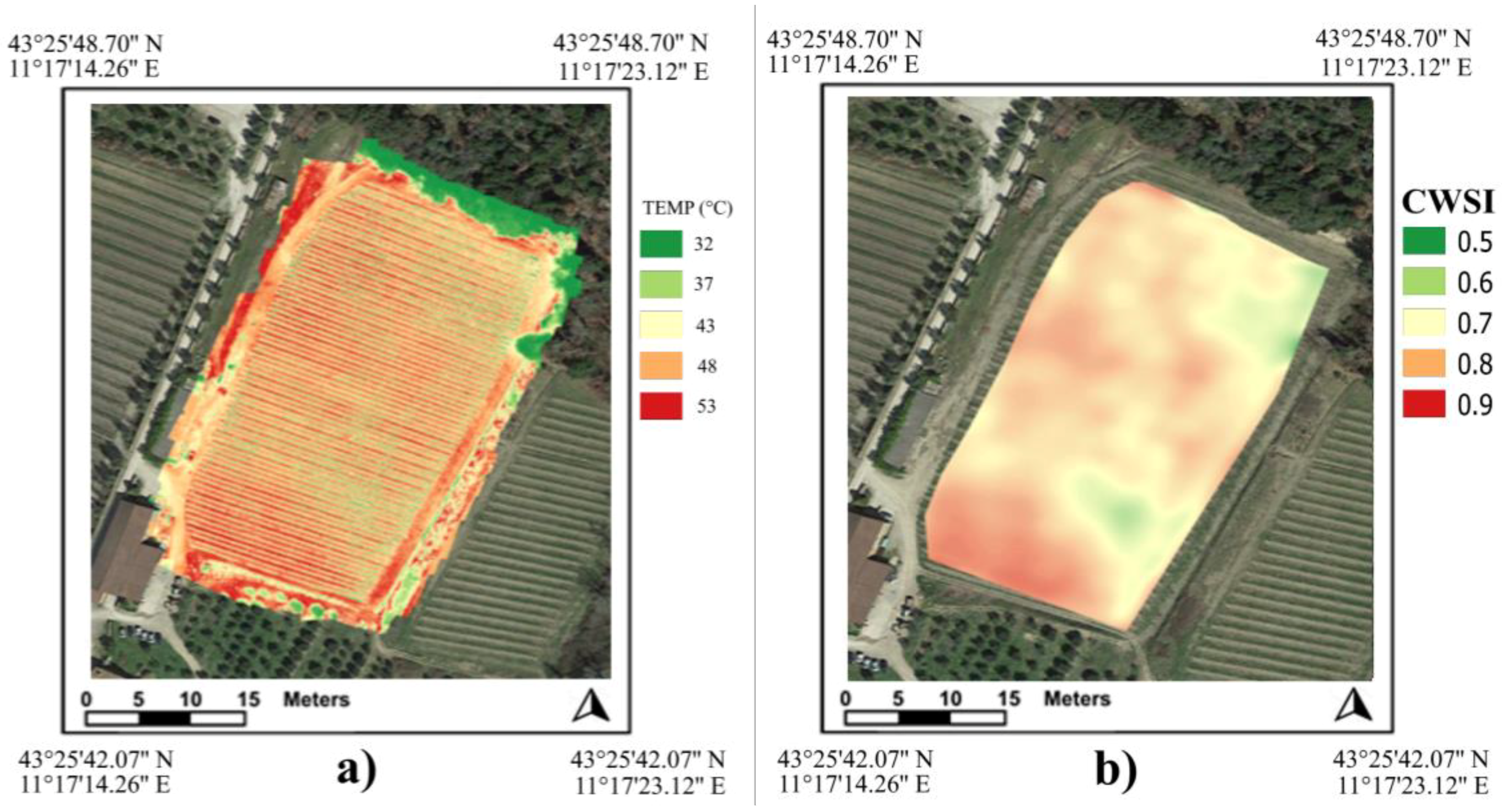
4.2. In-Field Thermal Variability and Crop Water Stress Index
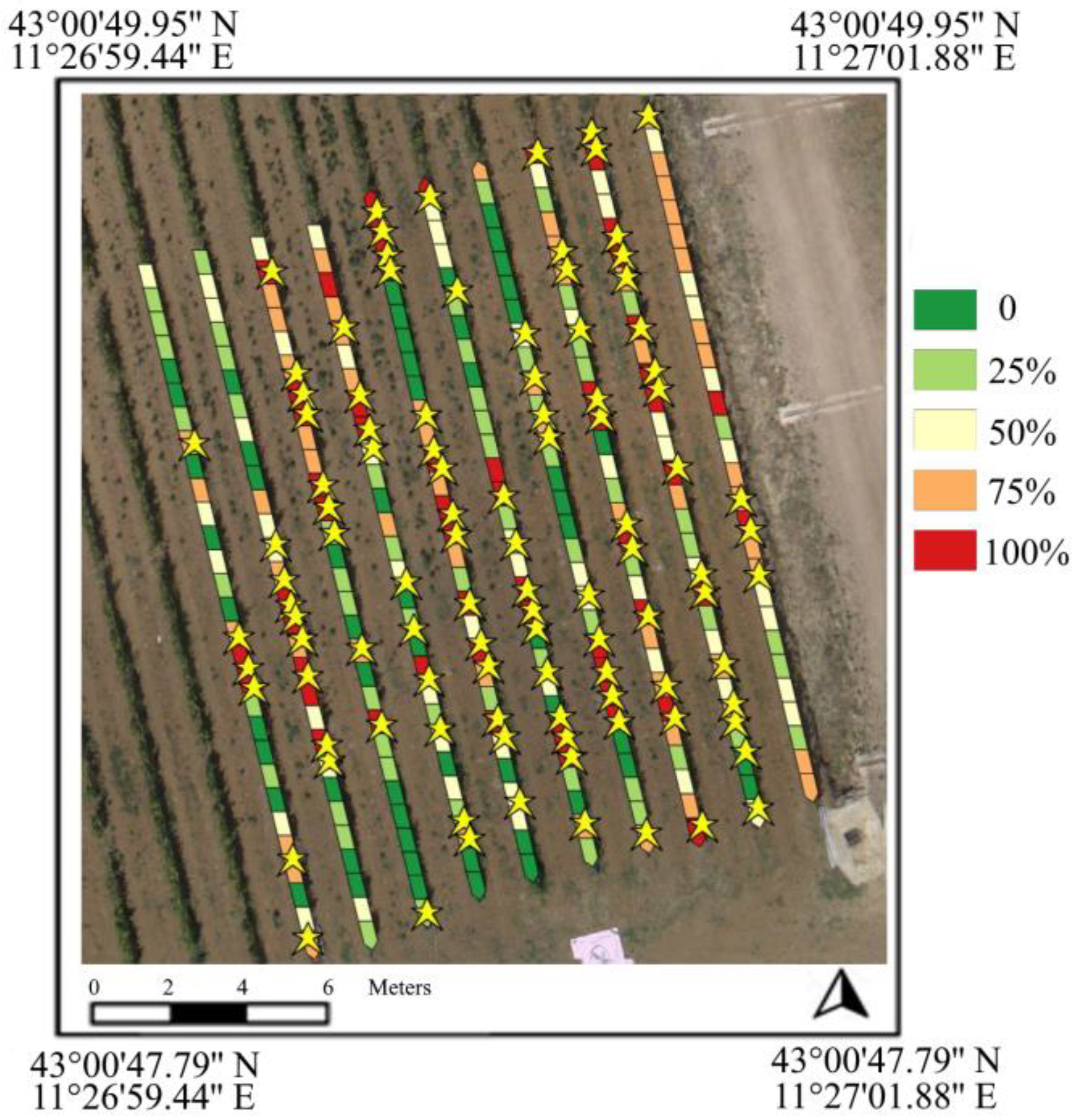
4.3. Missing Plant Monitoring
4.4. Overall Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arnó, J.; Martínez-Casasnovas, J.A.; Ribes-Dasi, M.; Rosell, J.R. Review. Precision Viticulture. Research topics, challenges and opportunities in site-specific vineyard management. Span. J. Agric. Res. 2009, 7, 779–790. [Google Scholar]
- Matese, A.; Di Gennaro, S.F.; Berton, A. Assessment of a Canopy Height Model (CHM) in a vineyard using UAV-based multispectral imaging. Int. J. Remote Sens. 2017, 38, 8–10. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F.; Miranda, C.; Berton, A.; Santesteban, L. Evaluation of spectral-based and canopy-based vegetation indices from UAV and Sentinel 2 images to assess spatial variability and ground vine parameters. Adv. Anim. Biosci. 2017, 8, 817–822. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Matese, A.; Gioli, B.; Toscano, P.; Zaldei, A.; Palliotti, A.; Genesio, L. Multisensor approach to assess vineyard thermal dynamics combining high-resolution unmanned aerial vehicle (UAV) remote sensing and wireless sensor network (WSN) proximal sensing. Sci. Hortic. 2017, 221, 83–87. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. In Proceedings of the 3rdEarth Resources Technology Satellite Symposium, Ottawa, ON, Canada, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Goel, N.S. Models of vegetation canopy reflectance and their use in estimation of biophysical parameters from reflectance data. Remote Sens. Rev. 1988, 4, 1–212. [Google Scholar] [CrossRef]
- Jacquemoud, S.; Bacour, C.; Poilve, H.; Frangi, J.P. Comparison of four radiative transfer models to simulate plant canopies reflectance: Direct and inverse model. Remote Sens. Environ. 2000, 74, 417–481. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Miller, J.R.; Noland, T.L.; Mohammed, G.H.; Sampson, P.H. Scaling-up and model inversion methods with narrow band optical indices for chlorophyll content estimation in closed forest canopies with hyper-spectral data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1491–1507. [Google Scholar] [CrossRef]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications for viticulture—A review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Hall, A.; Louis, J.; Lamb, D. Characterising and mapping vineyard canopy using high-spatial-resolution aerial multispectral images. Comput. Geosci. 2003, 29, 813–822. [Google Scholar] [CrossRef]
- Fiorillo, E.; Crisci, A.; De Filippis, T.; Di Gennaro, S.F.; Di Blasi, S.; Matese, A.; Primicerio, J.; Vaccari, F.P.; Genesio, L. Airborne high-resolution images for grape classification: Changes in correlation between technological and late maturity in a Sangiovese vineyard in Central Italy. Aust. J. Grape Wine Res. 2012, 18, 80–90. [Google Scholar] [CrossRef]
- Filippetti, I.; Allegro, G.; Valentini, G.; Pastore, C.; Colucci, E.; Intrieri, C. Influence of vigour on vine performance and berry composition of cv. Sangiovese (Vitis vinifera L.). J. Int. Sci. Vigne Vin 2013, 47, 21–33. [Google Scholar] [CrossRef]
- Gatti, M.; Garavani, A.; Vercesi, A.; Poni, S. Ground-truthing of remotely sensed within-field variability in a cv. Barbera plot for improving vineyard management. Aust. J. Grape Wine Res. 2017, 23, 399–408. [Google Scholar] [CrossRef]
- Johnson, L.F.; Roczen, D.E.; Youkhana, S.K.; Nemani, R.R.; Bosch, D.F. Mapping vineyard leaf area with multispectral satellite imagery. Comput. Electron. Agric. 2003, 38, 33–44. [Google Scholar] [CrossRef]
- Berni, J.A.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Santesteban, L.G.; Di Gennaro, S.F.; Herrero-Langreo, A.; Miranda, C.; Royo, J.B.; Matese, A. High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Jones, H.G. Irrigation scheduling: Advantages and pitfalls of plant-based methods. J. Exp. Bot. 2004, 55, 2427–2436. [Google Scholar] [CrossRef] [PubMed]
- Grant, O.M.; Tronina, L.; Jones, H.G.; Chaves, M.M. Exploring thermal imaging variables for the detection of stress responses in grapevine under different irrigation regimes. J. Exp. Bot. 2007, 58, 815–825. [Google Scholar] [CrossRef] [PubMed]
- Möller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of thermal and visible imagery for estimating crop water status of irrigated grapevine. J. Exp. Bot. 2007, 58, 827–838. [Google Scholar] [CrossRef] [PubMed]
- Gontia, N.K.; Tiwari, K.N. Development of crop water stress index of wheat crop for scheduling irrigation using infrared thermometry. Agric. Water Manag. 2008, 95, 1144–1152. [Google Scholar] [CrossRef]
- Jones, H.G.; Serraj, R.; Loveys, B.R.; Xiong, L.; Wheaton, A.; Price, A.H. Thermal infrared imaging of crop canopies for the remote diagnosis and quantification of plant responses to water stress in the field. Funct. Plant. Biol. 2009, 36, 978–979. [Google Scholar] [CrossRef]
- Romano, G.; Zia, S.; Spreer, W.; Sanchez, C.; Cairns, J.; Araus, J.L.; Müller, J. Use of thermography for high throughput phenotyping of tropical maize adaptation in water stress. Comput. Electron. Agric. 2011, 79, 67–74. [Google Scholar] [CrossRef]
- Alchanatis, V.; Cohen, Y.; Cohen, S.; Moller, M.; Sprinstin, M.; Meron, M.; Tsipris, J.; Saranga, Y.; Sela, E. Evaluation of different approaches for estimating and mapping crop water status in cotton with thermal imaging. Precis. Agric. 2010, 11, 27–41. [Google Scholar] [CrossRef]
- Rabatel, G.; Delenne, C.; Deshayes, M. A non-supervised approach using Gabor filters for vine plot detection in aerial images. Comput. Electron. Agric. 2008, 62, 159–168. [Google Scholar] [CrossRef]
- Kelcey, J.; Lucieer, A. Sensor correction of a 6-band multispectral imaging sensor for UAV remote sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Jones, H.G.; Vaughan, R.A. Remote Sensing of Vegetation: Principles, Techniques, and Applications; Oxford University Press: Oxford, UK, 2010; ISBN 9780199207794. [Google Scholar]
- Idso, S.B.; Jackson, R.D.; Pinter, P.J.; Reginato, R.J.; Hatfield, J.L. Normalizing the stress degree day parameter for environmental variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Jones, H.G.; Stoll, M.; Santos, T.; de Sousa, C.; Chaves, M.M.; Grant, O.M. Use of infrared thermography for monitoring stomatal closure in the field: Application to grapevine. J. Exp. Bot. 2002, 53, 2249–2260. [Google Scholar] [CrossRef] [PubMed]
- Bonilla, I.; Martinez de Toda, F.; Martínez-Casasnovas, J.A. Vine vigour, yield and grape quality assessment by airborne remote sensing over three years: Analysis of unexpected relationships in cv. Tempranillo. Span. J. Agric. Res. 2015, 13, 1–8. [Google Scholar] [CrossRef]
- Matese, A.; Baraldi, R.; Berton, A.; Cesaraccio, C.; Di Gennaro, S.F.; Duce, P.; Facini, O.; Mameli, M.G.; Piga, A.; Zaldei, A. Estimation of water stress in grapevines using proximal and remote sensing methods. Remote Sens. 2018, 10, 114. [Google Scholar] [CrossRef]
- Poblete, T.; Ortega-Farías, S.; Ryu, D. Automatic coregistration algorithm to remove canopy shaded pixels in UAV-borne thermal images to improve the estimation of crop water stress index of a drip-irrigated Cabernet sauvignon vineyard. Sensors 2018, 18, 397. [Google Scholar] [CrossRef] [PubMed]
- Delenne, C.; Durrieu, S.; Rabatel, G.; Deshayes, M. From pixel to vine parcel: A complete methodology for vineyard delineation and characterization using remote-sensing data. Comput. Electron. Agric. 2010, 70, 78–83. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Site A | Site B | Site C |
|---|---|---|---|
| Monitored trait | Vigor | Water stress | Missing plants |
| Area | Chianti Classico | Chianti Classico | Montalcino |
| Location | 43°25′41.20” N 11°16′15.56” E | 43°25′44.06” N 11°17′17.62” E | 43°00′49.95” N 11°27′01.88” E |
| Planting year | 2004 | 2008 | 1973 |
| Surface (ha) | 6.5 | 1.4 | 2.4 |
| Cultivar | Sangiovese | Sangiovese | Sangiovese |
| Spacing (m) | 3.0 × 0.9 | 2.2 × 0.8 | 3.0 × 1.0 |
| Row orientation | NE-SW | NW-SE | NE-SW |
| Training system | spur pruned cordon | spur pruned cordon | spur pruned cordon |
| Date/Time of flight | 4 August 2017 12:00 | 9 August 2017 12:00 | 23 May 2017 12:30 |
| Growth stages | Veraison | Veraison | Fruit-set |
| Soil | medium limestone mix | medium limestone mix | Silt and calcic |
| Average temperature | 12.1 °C | 12.1 °C | 12.4 °C |
| Annual rainfall | 826 mm | 826 mm | 691 mm |
| Characteristics | Tetracam ADC Snap | FLIR TAU II 320 | Canon EOS M 10 |
|---|---|---|---|
| Monitored trait | Vigor | Water stress | Missing plants |
| Camera type | multispectral | thermal | RGB |
| Sensor | CMOS global shutter | CMOS Standard | CMOS APS-C |
| Resolution (pixels) | 1280 × 1024 | 324 × 256 | 5280 × 3528 |
| Sensor photo detectors (Mp) | 1.3 | 0.1 | 18.6 |
| Spectral bands | R-G-NIR (Near Infrared) | LWIR (Long Wave Infrared) | R-G-B |
| Spectral range (nm) | 520–920 | 7500–13,500 | 400–700 |
| Lens (mm) | 8.4 | 19 | 18.0 |
| Dimensions (mm) | 75 × 59 × 33 | 45 × 45 × 30 | 109 × 67 × 32 |
| Weight (g) | 90 | 72 | 503 |
| Vigor | Pruning Weight (kg/vine) | NDVI Unfiltered | NDVI Filtered |
|---|---|---|---|
| LV (Low Vigor) | 0.41 ± 0.05 ** | 0.40 ± 0.06 *** | 0.55 ± 0.03 *** |
| HV (High Vigor) | 0.56 ± 0.06 ** | 0.54 ± 0.09 *** | 0.60 ± 0.05 *** |
| Vigor | Stomatal Conductance (mmol H2O m−2 s−1) | CWSI |
|---|---|---|
| LV (Low Vigor) | 84.4 ± 11.26 ** | 0.85 ± 0.05 ** |
| MV (Medium Vigor) | 151.8 ± 22.53 ** | 0.71 ± 0.02 ** |
| HV (High Vigor) | 176.8 ± 25.49 ** | 0.65 ± 0.03 ** |
| Ground-Truth | UAV Missing Plant Classification | |||||
|---|---|---|---|---|---|---|
| Field | Total | 100% (RED) | 75% (ORANGE) | 50% (YELLOW) | False Negative | Performance Index |
| C | 103 | 56 | 27 | 13 | 7 | 80% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matese, A.; Di Gennaro, S.F. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture 2018, 8, 116. https://doi.org/10.3390/agriculture8070116
Matese A, Di Gennaro SF. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture. 2018; 8(7):116. https://doi.org/10.3390/agriculture8070116
Chicago/Turabian StyleMatese, Alessandro, and Salvatore Filippo Di Gennaro. 2018. "Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture" Agriculture 8, no. 7: 116. https://doi.org/10.3390/agriculture8070116