4.3.1. Isosurfaces of Acoustic Sources
In the case of the Proudman acoustic sources, the selection of the isovalues for three-dimensional visualization of relevant acoustic sources is not trivial, therefore several values of the sound power levels
are presented and compared in
Figure 14. The resulting closed volumes increase when the acoustic power isovalue is set to a lower value. The closed volumes enclose the relevant noise sources related to the selected value. The loudest noise sources in
Figure 14a are as expected the propeller blades, the hub vortex, and its interaction with the rudder downstream, in addition to the appendage surfaces of the shaft brackets and the rudder. Unexpectedly, the rudder slipstream towards the ship hull seems to generate noise for a large axial extent downstream of the geometry. This can be attributed to the interaction of the tip vortex with the rudder geometry around the 12 o’clock propeller position, as the comparison with the 6 o’clock position at the same downstream location reveals, where there is no interaction with the rudder geometry, due to the shortened rudder length. Apart from the fact that the rudder is in the slipstream of the propeller, the lower inflow to the propeller and the resulting higher loads at the angular positions of the propeller close to the hull could increase the intensity of the interaction with the rudder.
At lower sound powers in
Figure 14b, significantly more details appear as possible acoustic sources. These include a clear overlaying waveform structure on the hub vortex isosurface and a cylindrical shape of noise-generating structure between the shaft brackets and the propeller becomes visible. Also, the tip vortex immediately behind the trailing edge is highlighted, which might only be limited in visualization, by the mesh resolution of the underlying FVM fluid flow simulation. With further higher thresholds for the sound power in
Figure 14c,d the tip vortex becomes dominant for all angular positions around the
-normal plane through the rudder. The noise generated by the vessel appears only in
Figure 14c enclosing a part of the stern section and the transom, meaning that a constant noise level is emitted by the vessel itself, which is plausible as the flow around the hull adjacent regions is not influenced by the propulsor and should be less unsteady.
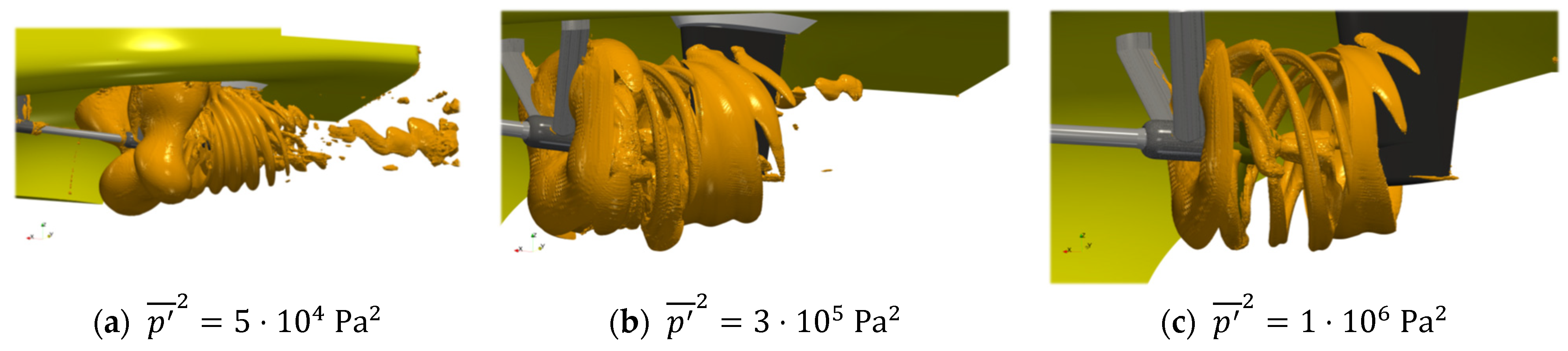
Another suggestion is to use the pressure second order statistical moments to locate noise sources as illustrated in
Figure 15 for several isovalues, which succeeds in highlighting important pressure-based flow features as well as deficiencies in the numerical simulation approach, in particular the sliding mesh approach. It has to be noted that the isosurfaces outside of the sliding mesh are time-invariant once a sufficient number of sample data is exceeded, while inside the rotating mesh region isosurface structures are moving with the propeller such as the tip vortex. The sliding mesh interface is apparent in
Figure 15b,c between the propeller and the shaft brackets, and the rudder, respectively. In
Figure 15a there are four distinct lobes from the propeller plane upstream on the isosurface, which may indicate a quadrupole noise source of the propulsor or be a result of the interaction with the shaft brackets and the vessels tunnel shape to improve propeller inflow. Especially the tunnel shape is responsible for a large downward extent of the hull boundary layer and thus strong interaction with the propeller as described above.
Behind the propeller, there are several structures indicating the tip vortices and their interaction with the rudder. An identical region as was used for the visualization method of the Proudman acoustic sources downstream of the rudder at the 12 o’clock propeller position is highlighted as a noise source. With the higher isovalue in (b) these details are removed, however, the propeller inside the rotating mesh region can be investigated, and in (c) the hub vortex is also visible.
A classic way to visualize flow features is the vorticity information, such as with the Q-criterion, which is given in
Figure 16 around the propeller for a typical isovalue used to highlight the trailing vortices. While it is not strictly connected to acoustic sources, it is indicative of increased turbulence due to the interaction between the main flow field and the hub as well as the tip vortex and possibly relaminarization in the vortex cores. In addition, the interactions between such a complex flow field and the solid surfaces may lead to noise. These interactions may be highlighted such as on the rudder in the image that shows wave-like patterns originating from the location, where the tip vortex of the propeller interacts with the rudder surface. This radial location appears around
from the propeller rotation axis, which corresponds to the region of the maximum thrust of this propeller design. In the image a steady wave of boundary vortices forms, on the rudder surface with a constant wavelength of
, which would equal an acoustic frequency of
and is thus outside the frequency range that is typically investigated.
The three options
,
, and
for highlighting three-dimensional spatial noise information as isosurfaces are compared side by side in
Figure 17 in the fluid volume. Unexpectedly the three options seem to be complementary instead of coinciding, highlighting different regions, and as such are individually not sufficient to indicate all acoustic sources. While the vorticity information favors the trailing vortices, the turbulence information is focused on the leading edge of the blades and the hub vortex, and the second-order statistical moments highlight the upstream directed noise as well as the spurious noise caused by numerical issues at the interface. Again, it is visible that the statistical approach comprises an excellent tool for highlighting discontinuities caused by numerical interpolation, proven by the cloud structures at the downstream interface. Whereas the tip vortex is not captured by
, possibly to generally weak vorticity values and possibly relaminarization, the hub vortex features much higher vorticity as it results from the interaction between the five root vortices of the blades. Thus, k by itself is not sufficient to investigate noise sources, with Q seemingly improving the location information. Concluding, these options are valuable as they require minimal post-processing and seem to indicate clearly regions of noise sources, however, they do not allow quantification of any noise emissions.
4.3.2. Lighthill Stresses
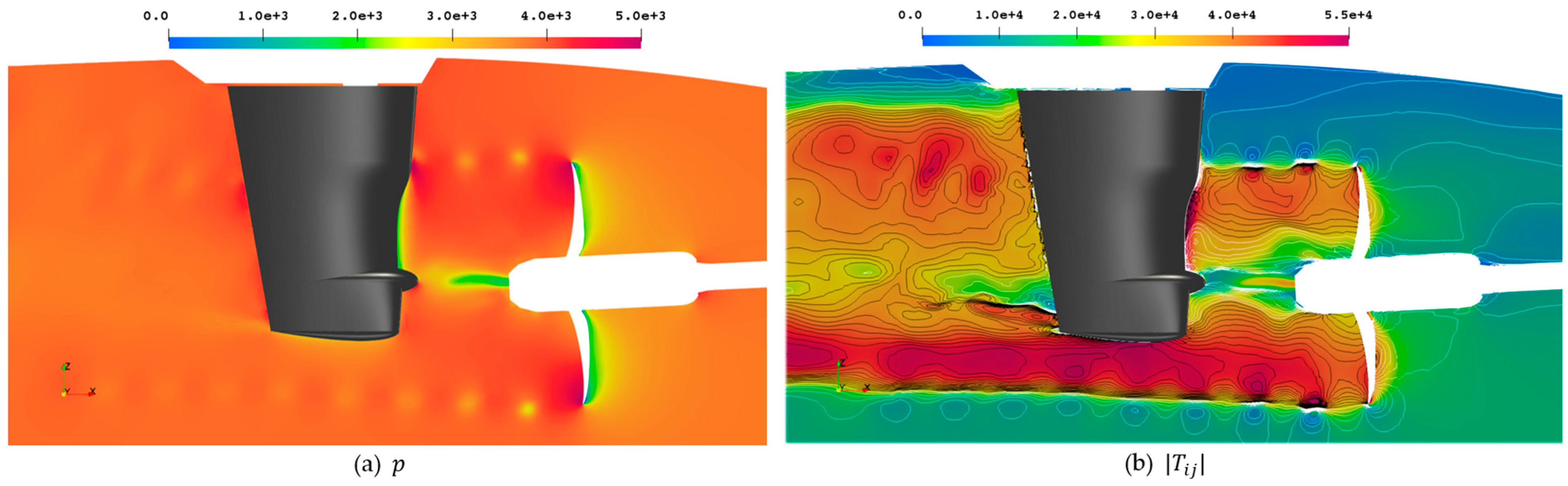
The instantaneous pressure pulse field at a randomly selected timestep is shown in
Figure 18 around the propeller hull combination on a midplane through the propeller, with the corresponding instantaneous pressure in
Figure 19a around the propeller and the rudder and the Lighthill stress tensor magnitude in
Figure 19b. The pressure pulses are a relatively good indicator of noise sources, with the tip vortex and the suction side blades highlighted, as well as the slipstream interaction with the rudder, especially at the lower end, where a trailing vortex from the rudder seems to create rather large acoustic fluctuations, not visible in the isosurface representations in
Section 4.3.1. In addition, the downstream interaction with the vessel transom is highlighted here, which is not registered in the other criteria, except Proudman acoustic sources.
While the pressure information in
Figure 19a itself is not useful to quantify acoustic emissions, it is indicative of locations of high-pressure gradients, which are attributed to noise emissions. The Lighthill stresses in
Figure 19b on the other hand indicate similar regions as the isosurfaces, with strong fluctuations at the tip vortex and the hub vortex, on the propeller blade suction sides, upstream of the rudder around
, and behind the rudder at the 12 o’clock position, and in addition below the rudder similar to the pressure pulses in
Figure 18. Thus, it seems that this representation combines the highlighted regions from all previous methods and thus proves itself a valuable tool to indicate noise sources.
The Lighthill stress tensor is evaluated from the symmetric fluid compressive stress tensor from Equation (13), shown in
Figure 20 for reference, which in turn is obtained from the symmetric perturbation stress tensor from Equation (12) in
Figure 21. In the figures, the tensor components are sorted according to their location in a
matrix, and symmetric tensors are only shown for the upper right side. It has to be noted that the off-diagonal elements experience small value ranges of
compared to the main diagonal with only positive values of
, meaning that the colormaps are selected to yield the best visualization and sacrifice comparability between tensor elements.
While the influence of the pressure field is dominating the main diagonal of with almost no difference between the elements, distinct structures appear on the off-diagonal elements, most notably for the rudder interaction as well as quadrupole-like structures in the tip vortex. For the element, the slipstream of the rudder is again highlighted at the 12 o’clock position, while emphasizes the locations at 6 o’clock and shows most notably the features in the hub vortex.
The perturbation stress tensor
is deviating from the
field on the main diagonal, however, all directional elements
,
, and
show very similar images compared to each other. The off-diagonal elements again feature a colormap that is different from the main diagonal and the previously used one in
Figure 20, to show a different range of details. The value range for the main diagonal is
, while the value range for the off-diagonal components is
. In the off-diagonal components, small-scale fluctuations at the sliding mesh interface upstream of the propeller and a slight level jump at the sliding mesh interface at the other ends of the cylinder are visible. It is clearly distinguishable by the eye where the interface is, even without knowing its exact location in advance.
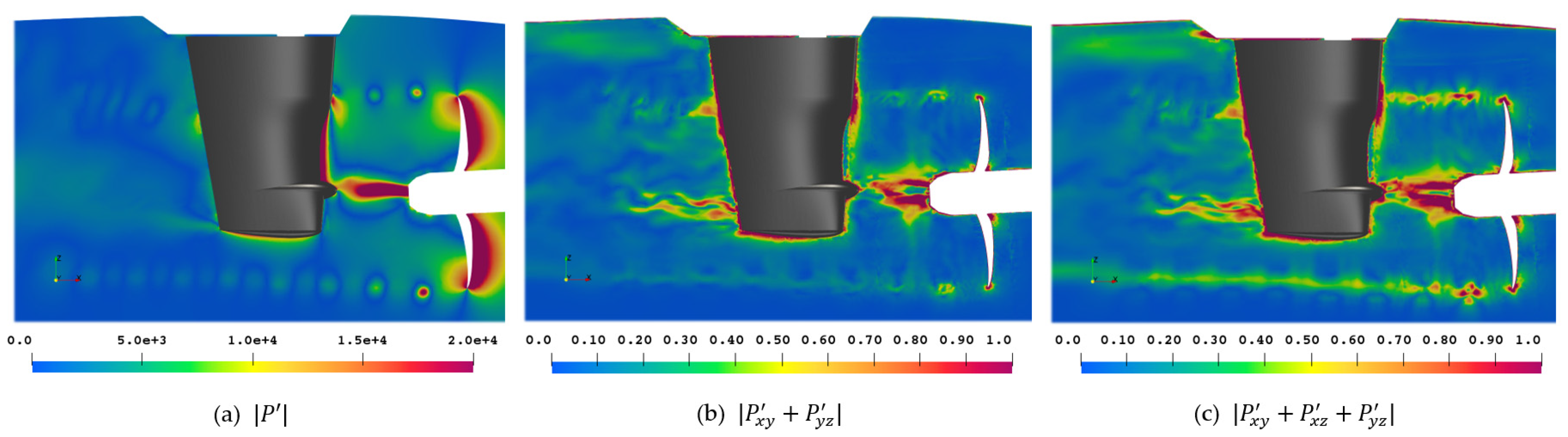
Figure 22 shows the magnitude of all components, which is of course dominated by the main diagonal due to the vastly different value ranges, and the different combinations of off-diagonal components of
. With this, important noise features become apparent such as the swirls in the tip vortex in (b) and the clover-leaf structure in (c). Also, this is the only way to visualize the numerical issue of the rotating mesh interface, which can be seen in (b) and (c) between the propeller and the rudder. Additionally, the rudder slipstream is accentuated at the expected angular positions.
Finally, the mathematically non-symmetric Lighthill stresses are illustrated in
Figure 23, which feature a stronger deviation from the previous stress tensors due to the
term. Where possible the colormap is kept identical, however, large differences in value range are apparent for the single elements of the tensor. Except for the
component, all elements feature value ranges with change. Comparing the upper right matrix with the lower left, the symmetry is high, with only the
-
comparison showing large differences, which have to be addressed by adjusting the colormap. The
-
element shows the difference between the direction of travel of the blades and therefore the swirl of the slipstream. The off-diagonal components
and
and their counterparts in the lower left matrix on the other hand stress exactly the regions, which are also emphasized in the rest of the investigation, meaning there is a clear connection between the noise sources and the visualization by means of Lighthill stresses.
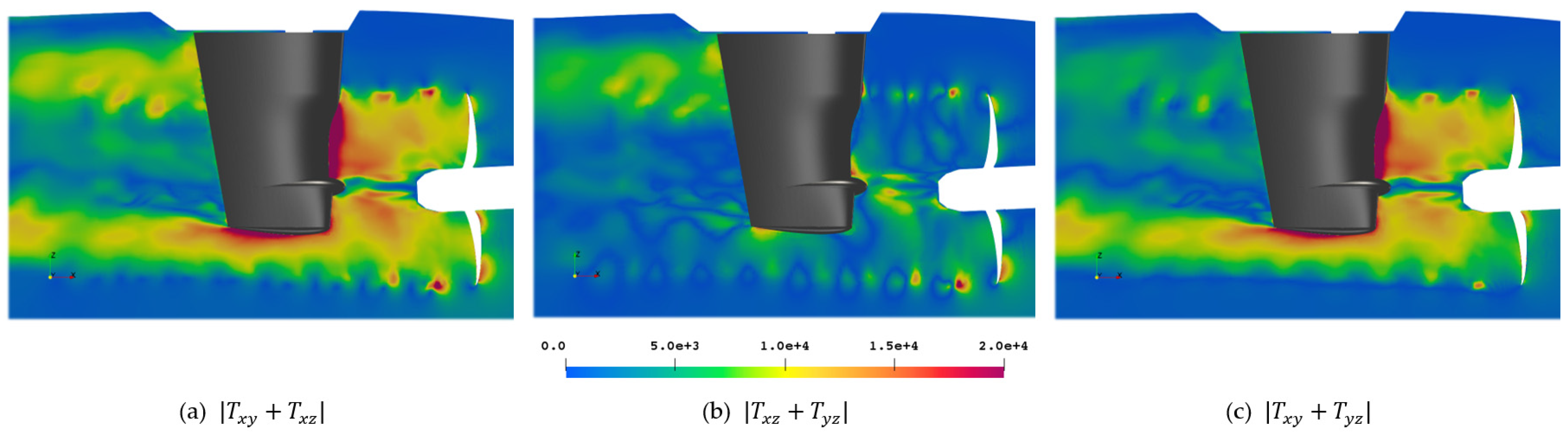
Again, the various combinations of the off-diagonal elements of this matrix are given in
Figure 24, which give rise to the expected positions of noise sources. In (a) propeller slipstream and rudder interaction are most prominent. In (b) the propeller tip appears to form a swirl structure upstream, indicating its influence on noise generation. The other highlighted regions are agreeing well with the regions obtained from the Proudman acoustic sources and the statistical moment isosurfaces. This effect can be seen behind the rudder around the 12 o’clock propeller position in
Figure 24b, which appears for all three methods.
Figure 24c is similar to
Figure 24a with a focus on propeller slipstream and rudder interaction.
4.3.3. Directivity
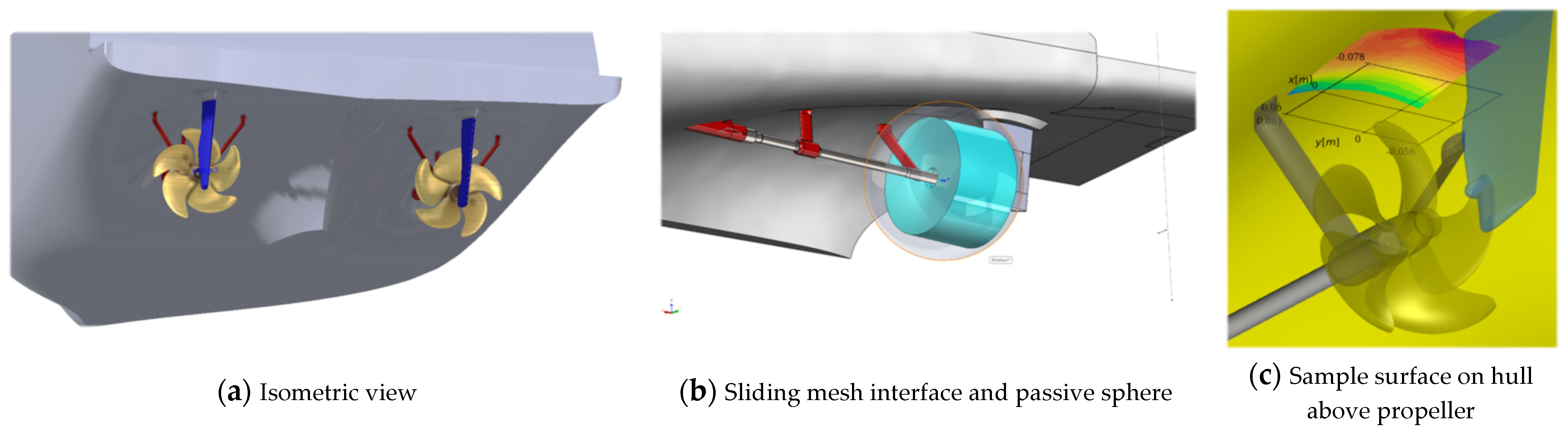
For the investigation of directivity, a passive 3D surface is constructed in the flow field. Since the propeller is the main source of noise, the origin of the coordinate systems used is located at the propeller, as in the simulation, and not at the centerline of the ship. As indicated in
Figure 25 a spherical surface is applied with the respective spherical coordinates from
and the positive axes directed to the bow and outwards. In the simulation, a half-model with a wall at the symmetry plane is considered.
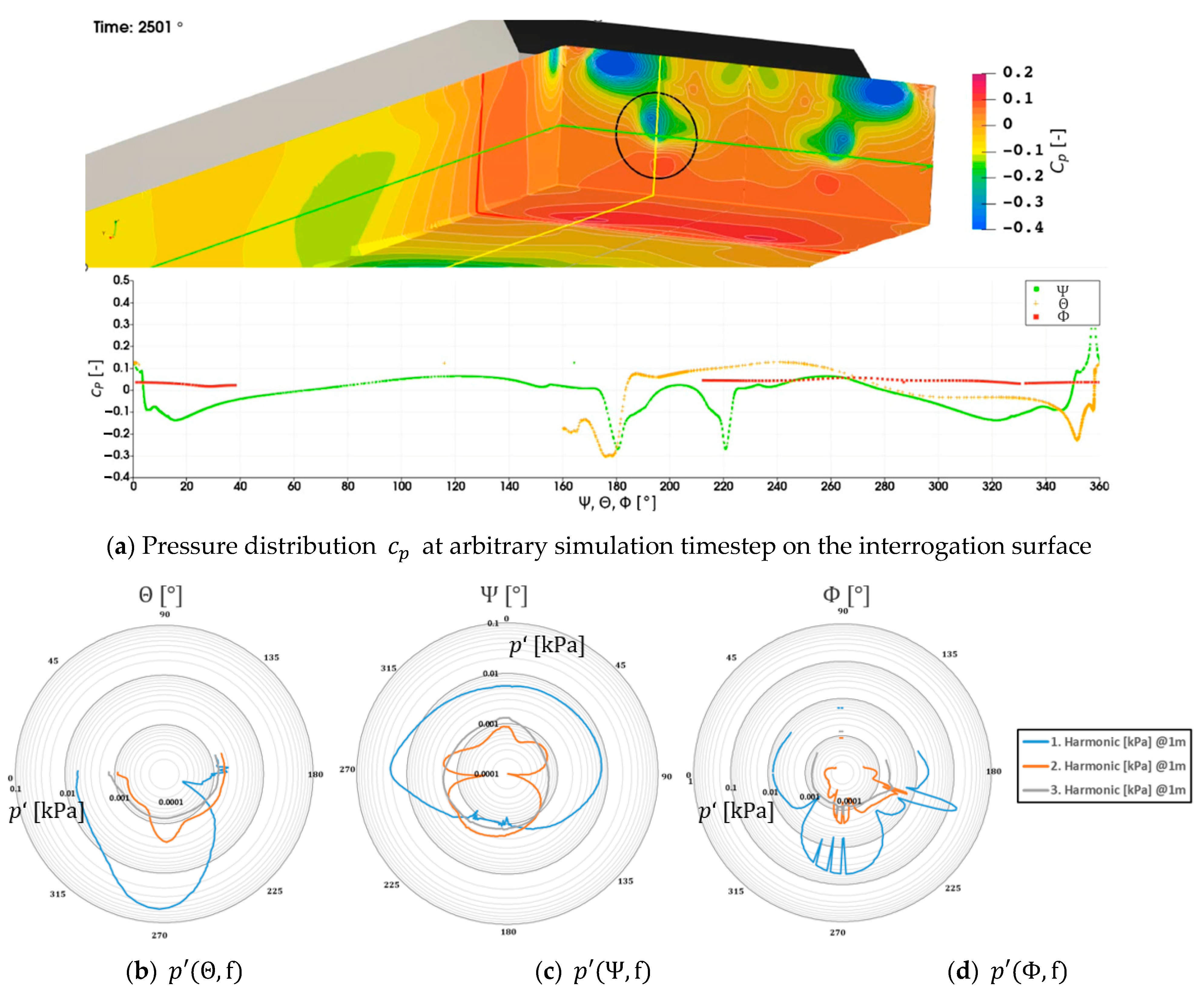
Figure 26a shows the passive spherical surface around the propeller, where the radius of that surface must be large enough to be completely outside the rotating mesh area in order to meet the stationary mesh requirements for post-processing in the frequency. The instantaneous time-variant pressure distribution at an arbitrary converged simulation timestep is visible on the surface and the instantaneous plots along the coordinate dimensions are shown below. The number of waves in the red line along the
dimension is commensurate with the number of blades and radiates along this dimension dynamically with time. It is noticeable that the pressure distribution does not create symmetrical waves, leading to an increased gradient in front of the leading edge and a decreased gradient behind the passing blade. Both
and
dimensions show clear directivity with a low pressure downstream of the propeller hub next to the rudder, with the waterline intersection creating more downstream pressure and the centerline parallel intersection leading to higher pressure towards the vessel. While this instantaneous pressure distribution is useful for understanding the flow field, only a frequency domain investigation obtained from this pressure data over five rotations with a frequency of
and evaluated at the blade passing frequencies provides a time-invariant representation of the emission characteristics. In
Figure 26b–d the information about the acoustic propagation along the dimensions is normalized to
. It has to be noted that the passive surface for the frequency domain analysis is intersected by the rudder and the hull due to technical limitations, which creates gaps in the polar plots that are only partially closed. For the centerline parallel intersection in
Figure 26b increased pressure pulses in the direction of the hull are visible for the first three investigated propeller harmonic frequencies, which is thought to be due to the hull reflections, however, with the wavelengths of
,
and
neither reflections at the hull nor the domain would be physical. Another possible reason could originate in the wakefield, which creates a deviation in the effective angle of attacks for the propeller in the regions close to the hull, usually lower, possibly leading to different emission characteristics. For the
direction in
Figure 26c, similar trends appear with the pressure pulses increased on the inwards side of the propeller for the first harmonic frequency. In addition, there is a high and strongly fluctuating downstream component in pressure pulses for all displayed frequencies. For
Figure 26d the pressure pulses are generally lower and isotropic for the first harmonic, while the higher harmonics show increased downward and downstream directivity. All harmonics have a very strong increase in pressure pulses at the intersection of the interrogation surface with the hull geometry.
A similar analysis is conducted for the rectangular cuboid spanning the complete propeller-hull configuration by mirroring the result at the vessel centerline in
Figure 27, which makes the assumption of a monopole point source for adjusting the pressure pulse distance information somewhat questionable. The instantaneous pressure information in
Figure 27a with the three intersections along the coordinate dimensions shown in
Figure 25 and the propeller diameter projection indicated in black at the aftward side of the cuboid does not show large variations along the surface except for the areas in the propeller wake, visible for the waterline and centerline intersections at
. Downstream of the hull above the black circle is a negative pressure area exceeding the values behind the propeller. This does not indicate a larger contribution to emitted noise, as it is only a time snapshot, however, it indicates that the actual wave pattern might deviate strongly from the assumed flat surface, which could have a significant impact on noise propagation.
A more informative insight into the emission characteristics is given by the frequency domain pressure pulses, which due to the distance to the origin have very low values overall, nevertheless, a quantitative comparison is possible. In the polar plots, the left side is the starboard side and care must be taken as the center of the coordinate system is still at the propeller and not midship, which distorts the polar plots slightly in the right half. Starting with
Figure 27b along the center line midplane through the origin, the emissions to the bow and downward are larger than to the aft for the first harmonic frequency, which is most likely a result of the scaling to
by the assumption of a point source. The higher frequencies show a more uniform directional distribution, with the second harmonic increasing in a downward direction. For the waterline parallel intersection in
Figure 27c again the first harmonic is increased in bow direction and shows some fluctuations at the two propeller slipstream intersections at
and
. For the second harmonic, the emission to the sides of the propeller is very low, creating a distinct directivity towards the aft and the bow, with the first slightly deformed towards the sides. The third harmonic on the other hand has a uniform shape stretching slightly along the direction of travel. In
Figure 27d the framewise intersection emission characteristic is given with the first harmonic emitting strongly to the sides and downwards. The peak at
is most likely a result of the scaling to
and the shifted coordinate system through the propeller. The second harmonic shows a similar emission with lower values. The third harmonic on the other hand experiences again an isotropic characteristic. Overall, it is unclear if the absolute values are meaningful with the applied scaling method, however, the emission characteristics give valuable insight into the acoustic interaction between the vessel hull and propulsor.
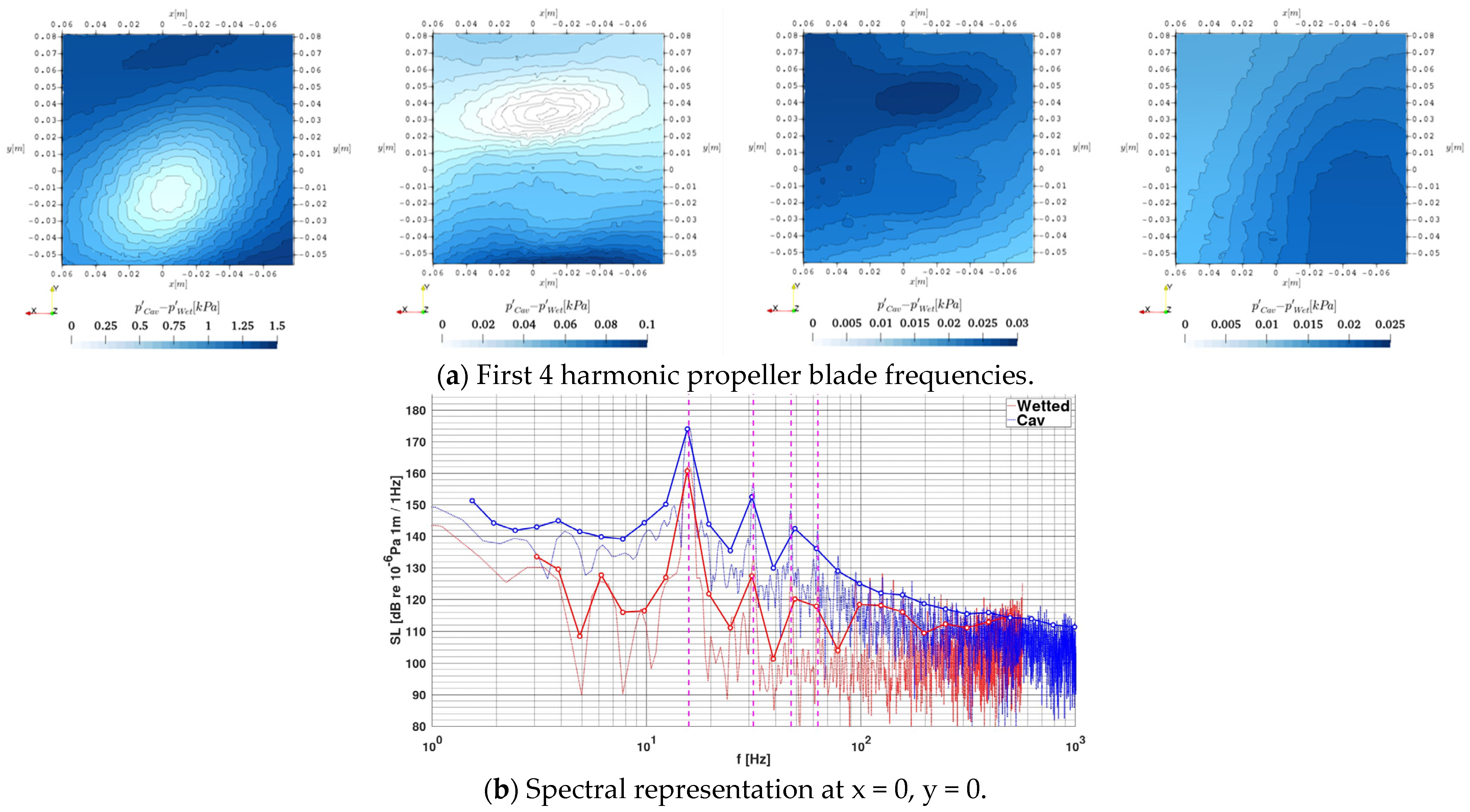
Besides the amplitude information, the phases are of interest in the far-field emissions, if the interaction with other noise sources or reflections from the environment is part of the problem. In
Figure 28 the complex phase angle from Equation (17) is plotted as a contour on the sphere presented in
Figure 26 and shown isometrically from the upstream direction with the shaftline and from the downstream direction with the vessel and the rudder for the first four propeller blade harmonics
, respectively. As proposed before the rudder and skeg act as reflection boundaries that detune the phase, when comparing inwards and outwards directed emissions, which is particularly visible for the higher harmonics with a phase difference of around
between inwards and outwards directed sound. For the first harmonic the area on the sphere is slightly smaller with only the upwards-directed surfaces on the inwards side showing the phase shift, while otherwise the emission features a uniform phase. The tip vortex radii intersection in the downstream direction at
is distinct for all harmonics, with the higher harmonics increasing the effect radially.
In
Figure 29 the complex phase angle with the Fourier-transformed time series obtained by Equation (16) is given on the same rectangular box used in
Figure 27 to show the directivity of the phase information to the sea floor, the outside of the vessel and the aft direction, with the transparent propeller-hull combination indicated for orientation. The achieved value range is small with respect to the maximum possible range from
, indicating a predominantly monopole-like source behavior of the propeller-hull combination. However, there are interesting patterns visible that require detailed analysis. In the view from below the upwards and downward directions of the blades directly below the propeller are visible, see
Figure 29c. That is in line with the results presented in
Figure 7 on the hull, and in addition a detuning of the phases around
due to the reflections by the rudder in combination with the skeg of the hull on the inwards side and the half field on the right of the plane
are clearly identifiable. A distinct phase shift of
is visible running across the control surface from the bottom of the rudder to the shaft brackets to the hull along the origin, where the propeller is located, which causes mainly a disparate outward emission to the region in front of the propeller and behind it. In the aft view the detuning by the contained region between the rudder and the skeg of the hull by comparing the half-planes with respect to
is again visible. In addition, the turbulent slipstream of the propeller-rudder combination produces a range of phases with a difference of maximum
, which again considering the complete possible value range of the complex phase angle is surprisingly small, however, the chaotic nature of the turbulent mixing is visible in the phases of the sound source representation on the passive surface as well. Comparing this slipstream appearance with the one on the spheres from
Figure 28, which intersects mid-rudder and shows a high degree of order, it is clear that the interaction of the propeller slipstream with the rudder creates this chaotic phase emission characteristic downstream.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}