1. Introduction
Efforts to enhance ship performance are intensifying as environmental regulations for ships become more stringent. To estimate ship performance in general, the resistance required for a ship to advance at a constant speed is measured, and the effective horsepower (EHP) is calculated in the calm water condition. On the other hand, Vinayak et al. [
1] showed that there are various sea conditions by a real seaway through worldwide oceanic wind and wave data on the ECMWF website. It was pointed out that a large difference occurred by comparing the travel time and fuel consumption according to sea conditions in the same vessel.
Real-world maritime operations contend with unpredictable environmental conditions like waves and wind, with waves having the most pronounced impact, particularly due to the dense seawater in which ships operate. Studies on estimating the added resistance caused by waves have been conducted for a long time. In particular, added resistance has been estimated through empirical formulae [
2,
3,
4,
5], model experiments [
6,
7,
8,
9,
10,
11,
12,
13], and numerical analysis [
14,
15,
16,
17,
18,
19,
20] so far.
Experimental methods for estimating added resistance can be divided according to the degrees of freedom (DOFs). The DOFs are limited by the experimental facilities and the complexity of the data obtained. Most captive models are rail-type models with a long test tank called a towing tank, and the ship advances without a heading angle. A 2-DOFs experiment is generally performed with the heave and pitch movements as the DOFs.
Sadat-Hosseini et al. [
10] compared the resistance performance obtained when the DOF for the surge is given at different experimental institutions. The effect of the surge was insignificant, and the effect of the heave and pitch on the change in resistance was considered large. Hino et al. [
21] compared the resistance and motion with a fixed surge and free surge at various experimental institutions. The effect of the surge was insignificant, and the damping effect of the spring installed to consider the surge could affect the resistance results.
Recent studies have considered the conditions of having a heading angle, such as in bow-quartering or beam sea conditions. Islam et al. [
17] compared the heave and pitch RAOs according to the DOFs under oblique regular wave conditions using a KVLCC2 hull. Through a computational fluid dynamics (CFD) computation, 2 DOFs (with free heave and pitch), 3 DOFs with added roll, and 5 DOFs with only sway restraints were considered. As the DOFs increased, the effect of the roll increased, and the heave and pitch RAOs were relatively low.
Mousavi et al. [
19] estimated the added resistance performance in irregular oblique waves through CFD for a DTMB 5415. Using the STAR-CCM+ DFBI model, the 4-DOFs conditions of free surge, roll, pitch, and heave were considered. As the heading angle became farther from head sea conditions, the roll motion results of strip theory and CFD showed a difference. Mikkelsen et al. [
20] applied 4 DOFs to the KCS hull, which was the same as in the study by Mousavi et al. [
19]. Using CFD, the added resistance and motion RAOs were systematically compared for waves entering at an angle of 45 degrees from head sea conditions to following sea conditions. In addition, each result was compared, considering various wavelength ratio conditions. They pointed out discrepancies from the experimental results under the same conditions due to experimental uncertainty.
When considering the oblique waves, the difference in the motion RAOs by DOF was confirmed through prior studies. Otherwise, it is relatively easy to constrain the DOFs in numerical analysis, but it is difficult to constrain the DOFs selectively in experiments. Therefore, experimental studies considering 6-DOF conditions have been conducted. One method is applying a soft-mooring system such as a spring to tow the hull. The spring restores the surge, sway, and yaw motion, which are non-restoring motions. Seo et al. [
13] applied a spring system to a KVLCC2 in the ocean engineering basin in the Korea Research Institute of Ships and Ocean Engineering (KRISO). Force was measured in the bow and stern with load cells, and tension was also measured as a force in a tension meter. When measuring added resistance, long-period resistance and motion occur from the spring, which means the post-processing of the result is necessary. As a result, a polar diagram of added resistance according to the wave directions is created by comparing potential method results. Similarly, as a numerical study, Cho et al. [
22] estimated the added resistance performance in bow-quartering sea conditions using the soft-mooring system. The artificial spring was implemented as an external force on the hull dynamic fluid body interaction (DFBI), which restore the non-restoring forces. The 6-DOF results are compared with those of the 2-DOF and show the difference in the roll RAOs.
In addition to the added resistance, Dai et al. [
23] compared the self-propulsion factors in oblique waves using the added resistance results for the KVLCC2 hull. The propeller revolution, thrust, and torque at the self-propulsion point were determined by calculating the towing force in the oblique wave. Overall, the self-propulsion factor in waves tended to be lower than that in calm water.
Uharek and Hochbaum [
16] conducted an experiment in oblique wave conditions with a twin-screw passenger ship for Meyer Werft. The test site was the Technische Universitat Berlin (TUB) and Hamburg Ship Model Basin (HSVA). The surge and sway forces and yaw moment were compared between cases in which all movements were fixed and spring systems in which all movements were free. In addition, the experimental results were compared with computation results from the in-house CFD code (Neptuno).
Another method is a free-running test that maintains a self-propulsion state through propellers and rudder control. The model ship maintains directional stability through the rudder, and the propeller’s rotation rate is adjusted to maintain the desired speed. Since the free-running test causes changes in the stern pressure and flow due to the propeller rotation, the added resistance should be calculated while considering the propeller’s suction effect [
11]. Similarly, Yoo et al. [
12] conducted experiments through free running on an LNG carrier with twin skegs, and the resistance and motion were compared with 3-DOF CFD. The wave conditions considered were irregular wave conditions. Overall, the experiment and CFD showed similar tendencies, and it was pointed out that the added resistance estimated using the spectral method was relatively low. In the case of motion, the surge wave slightly drifted due to the difference in the thrust system.
In this study, the three methods described above were implemented by CFD computation. First, with the captive model, the 2- and 3-DOF computations were performed with the heave, pitch, and roll (for the 3-DOF) free. For the soft-mooring system, the 6-DOF calculation was performed by numerically modeling a spring on the bow and stern, similar to Seo et al. [
13]. A free-running model was then implemented using a virtual disk for the propeller performance. By implementing proportional integral derivative (PID) control in CFD, the propeller rotation speed and rudder angle were controlled.
Using these three methods, the added resistance coefficient and motion RAOs were compared with the three different heading angles (i.e., 180, 150, and 120 degrees). In the case of 6 DOFs, the y-direction force and yaw moment of the hull were compared. To compare the flow characteristics around the hull according to the wave direction, the streamlines passing around the hull and nominal wake were compared using the condition of . The streamlines were compared in the flow close to the propeller hub and the flow far away. In the case of the nominal wake, the change according to the time-series average and the encounter period was compared.
2. Numerical Conditions
2.1. Governing Equations and Numerical Schemes
For the CFD computation, the governing equations were the unsteady Reynolds-averaged Navier–Stokes (URANS) equations, which model the Reynolds stress term in the Navier–Stokes (N–S) equation with the assumption of incompressible inviscid flow except near walls. Commercial CFD software, STAR-CCM+ 15.06 version, was used to solve the URANS equations.
The URANS equation can be written in tensor form in Cartesian co-ordinates as shown in Equation (1). It includes the Reynolds stress term (
), which is a nonlinear term and required to determine. One way to round this out is to use turbulence models, which obtain the unknown values by assuming or implementing the empirical equations. In this study, the realizable k–ϵ (RKE) model has been chosen as the turbulence model; this model can construct a relatively coarse grid near a wall, and the wall Y+ was distributed between 30 and 60. The RKE turbulence tends to be stable in the residual of the calculation and results in a fast convergence. Moreover, wave dissipation can be minimized in the calculation domain by using
and
for the turbulent dissipation rate (k) value and turbulent kinetic energy (
), respectively.
where
is the three-dimensional velocity vector (
= 1,2) in the x and y directions. The flow variables are decomposed into the mean component (
) and the fluctuating component (
).
,
,
, and
are the static pressure, time, density, and kinematic viscosity, respectively. To track the movement of the vessel, a dynamic fluid body interaction (DFBI) model was used.
A pressure-based segregated algorithm was used to solve the pressure or pressure correction equation derived by the continuity and motion equations. The pressure-based segregated algorithm converges to a numerical solution through iterative calculations. This algorithm stores the discretized equation over time and applies it to the properties of the fluid. The discretized governing equation is applied to each control volume as Equation (2):
where
is the control volume,
is the density,
t is the time,
represents the transport of a scalar property,
v is velocity,
is the surface area of the control volume,
is the diffusion coefficient, and
is the source terms, special forms of the partial differential equations for mass, momentum, energy, and species.
The above equation converges as in Equation (3), and it is necessary to determine the convex term . Since the convex term affects the stability and accuracy of the analysis, it is necessary to select an appropriate technique. In this study, the second-order upwind (SOU) technique was used as a convection term. In addition, the hybrid Gauss–least squares method was applied as a gradient method to determine the center and face center values of the grid. And the venkatakrishnan limiter was used to limit the inter-lattice interference. For the diffusion term, the central difference method was used, and the semi-implicit method (SIMPLE), which obtains the pressure field by mass conservation of the coupling between velocity and pressure, was used. In the analysis, the under-relaxation factors of velocity and pressure of 0.6 and 0.4, respectively, were used.
The volume of fluid (VOF) wave model was used to capture the free surface. The VOF method is a method of expressing the fraction value of the fluid phase to be implemented between 0 and 1 in a cell. Moreover, a VOF wave scheme following the fifth-order Stokes theory was used to generate regular and irregular waves. To reduce the dissipation of the generated waves, a second-order temporal discretization scheme was applied. A time step corresponding to 1/400 of the regular wave encounter period was used.
2.2. Geometry
In this study, the main ship was an S-VLCC tanker, which was designed by Samsung Heavy Industries, as shown in
Figure 1. The details of the model ship and propeller are listed in
Table 1. A 1/68-scale model was chosen, which is the same scale as in the SSPA experiment [
11].
As the target propeller, the KP458 KVLCC2 propeller was used. In the co-ordinate system for computation, the x-axis was positive from the stern to the bow, the y-axis goes in the positive direction to the port side, and the z-axis is the opposite direction of gravity. The origin of the co-ordinate system was set as the stern, and the free surface was realized at the point where the z-axis is 0. A wave travels in the negative x-direction.
2.3. Simulation Cases
The CFD cases are shown in
Table 2. In the head sea conditions, 2 DOFs (with free heave and pitch) and the free-running method were considered. Under a heading angle of 150 degrees, all cases using 3 DOFs (with free heave, roll, and pitch), soft mooring, and free running were compared. Since the captive model is affected by waves coming from the side, the roll motion was also considered. Finally, in the case of a heading angle of 120 degrees, the captive model was excluded. A total of five conditions (
) were considered for wave conditions from short to long waves, and the wave steepness (
was set to 0.02 for short waves and 0.01 for long waves.
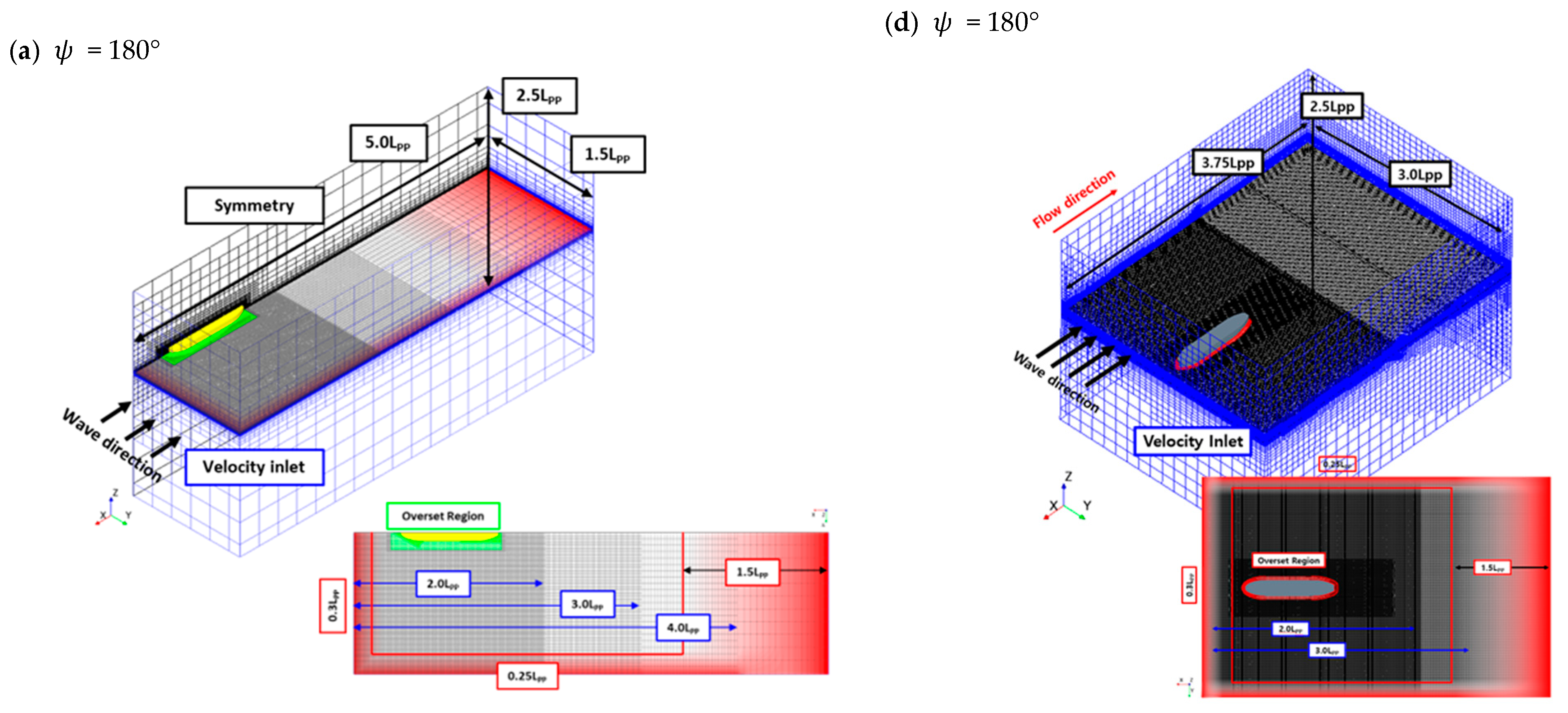
2.4. Computational Domain and Boundary Conditions
Three grid systems were used to evaluate the added resistance in oblique waves. First, in calm water and head sea (
) conditions, calculations were performed using a captive model and soft-mooring system in half-breadth conditions, as shown in
Figure 2a. The distance from the hull to the inflow boundary was 0.5
, which is intended to minimize wave dissipation. A length of 3.5
was applied, including the grid damping area in the downstream area of the hull to prevent wave reflection. The length to the side and bottom boundary was 1.5
, and the length to the top was 1
.
To eliminate the effect of reflected waves in the numerical analysis domain, a wave-forcing condition was adopted at the inlet, outlet, and both sides, where the velocity inlet boundary conditions were applied. In the wave-forcing zone, we applied 0.3 to the inlet and both sides, and 1.5 to the outlet, to minimize the influence of waves reflected from the domain boundaries. For the boundary conditions, a velocity inlet condition was applied to the inlet, side (far from hull), outlet, and top and bottom. A symmetry condition was adopted on the side plane with the hull. A no-slip wall condition was applied to the hull.
In the case of the bow-quartering wave conditions (
=150° and 120°), the full domain was applied with a symmetrical half-width domain, and a velocity inlet condition was applied as shown in
Figure 2b,c. A trimmed mesh was used, which had the advantage in realizing the height of a wave. Approximately 2.6 million grid elements were used for the half domain, and approximately 6.2 million grid elements were used for the full domain. The numbers of grid elements in the overset region were 1.5 million and 3.1 million. To consider both the long- and short-wave regions, 120 grid elements per wavelength and 20 grid elements per wave height were applied at
= 1.0 and
= 0.01.
The part marked with red is the wave-forcing area and was applied differently according to each boundary surface. The forcing boundary condition applies a theoretical wave to the boundary surface and minimizes the dissipation of the wave in the desired area by applying the transport equation in the input length. A forcing length of 0.3 was applied to the inlet, 0.25 applied to the side, and 1.5 applied to the outlet.
An adaptive mesh refinement (AMR) grid system was used for free-running calculations as shown in
Figure 2d–f. The AMR grid can be adjusted so that the cell size becomes fine along the free surface based on the VOF, and the generated waves are accurately implemented without modifying the grid according to the wave conditions. Through a series of tests, the optimal parameters used for the AMR grid were determined as a transition width of 10 and a free-surface maximum refinement level of 4.
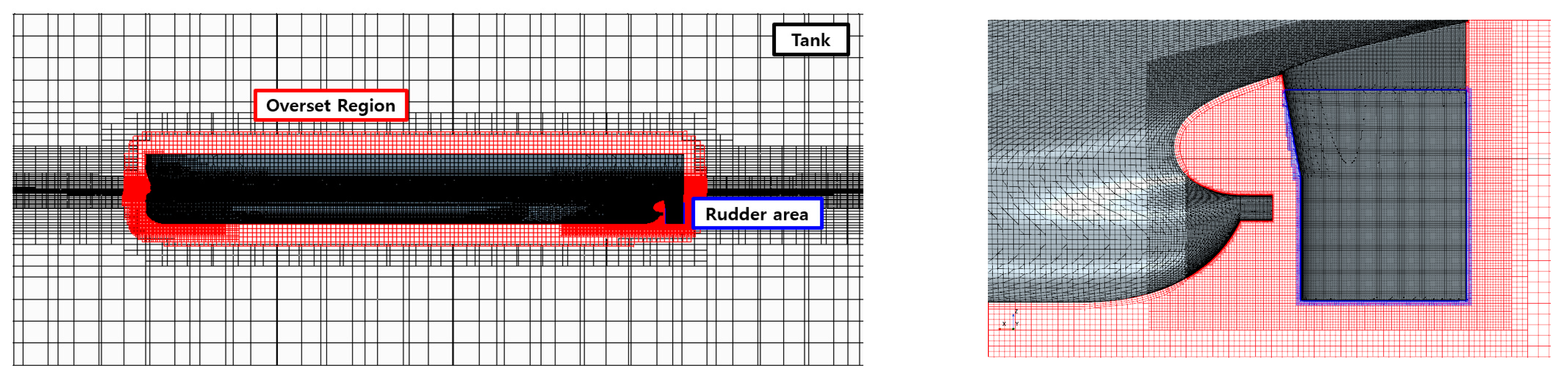
When using the AMR grid system, it is recommended to select an overset area that is a specific length away from the hull surface as shown in
Figure 3, and the rudder area is applied as another overset grid system within the overset area to enable rotation. An oblique wave was considered as a method of rotating the ship for each heading angle in the same size domain. The domain was reduced by 0.75
in the longitudinal direction and 0.3
in the side direction compared to the fixed grid described above. Similarly, the wave-forcing area was set in the same way as in the fixed grid.
2.5. Soft Spring System
To apply the 6 DOFs without steering gear, the ship needs a means to regain non-restoring motions such as surge, sway, and yaw. In this study, a soft-mooring system was used, and a method of attaching two springs each to the bow and stern according to the height of the KG was chosen [
13]. A spring can be implemented by defining a spring constant and location in STAR-CCM+. The force by the spring acts as an external force on the hull defined in DFBI. According to ITTC [
24], when selecting the spring constant, it is recommended that the natural period of the spring be more than six times the wave generation period of the longest wave condition to be considered.
The spring’s natural period can be calculated by Equation (4):
where
is the natural period of the spring,
is the mass of the ship,
is the added mass of the ship, and
is the spring constant [
25]. In this study, a spring constant of 100 N/m with a sufficiently long natural period was selected.
Figure 4 shows the soft spring system attached to the vessel and structure of springs in the numerical simulation.
2.6. Free-Running Model Test
A free-running model was adopted to implement 6 DOFs. For free running, the rudder and propeller rotation rate should be controlled to keep the same heading angle and self-propulsion state, respectively. A virtual disk was applied to mimic the propeller performance. The performance of the virtual disk of a KP458 propeller was verified through a POW test and showed similar results to the NMRI experimental results as shown in
Figure 5 [
26].
The target vessel of this study was an S-VLCC, but we tested whether free running can be implemented through STAR-CCM+ through a KVLCC2 hull. The type of rudder used was a horn-type rudder, as shown in
Figure 6a. It was divided into a moving part (marked in red in
Figure 6b) that can move to the port side and starboard side along the rudder axis, and a fixed part connected to the hull. The rotational speed of the rudder was limited to a maximum of 2.32 degrees/s on a full-scale basis, and the rudder can be rotated up to a maximum of 35 degrees.
PID control was used to adjust the aforementioned two variables. PID control was utilized in STAR-CCM+ by using the result for every iteration, which can be tracked using a field function, reported, and monitored. The PID gain value needed to be selected to adjust the propeller rotation rate and rudder angle. There are theoretical methods for selecting the PID gain value such as the Ziegler–Nichols method, but, in this study, the gain value was selected through a case study. As shown in
Table 3, we tried to select a case with low vibration while converging quickly, which depends on the PID gain values. A total of seven propeller rotation rates were tested, from Propeller-V1 to V7, and a total of 11 cases were tested to adjust the rudder angle.
Figure 7a,b show the yaw angle and the rudder angle according to time, respectively, and the representative cases are plotted. As shown in
Figure 7a, there is a difference in the yaw angle’s convergence time depending on the gain value. Through the case study, the most stable convergence case was selected and applied to subsequent calculations. The gain values applied to PID control were
= 0.01,
= 1.0, and
= 5 × 10
−5 for the propeller’s rotation speed, and
= 0.02,
= 1.0, and
= 5.0 for the rudder angle.
2.7. Feasibility Test of Free Running Using KVLCC2
The feasibility of the added resistance computation in a wave was tested through the KVLCC2 at the design speed (
Fr = 0.142) through the free-running state. The method for implementing the free-running technique was described in detail in
Section 2.6. However, the propeller rotation speed should be adjusted to maintain the target ship speed during free running.
In this study, the point at which the average resistance and thrust are equal in waves was selected as the self-propulsion point. The resistance of the ship in the wave fluctuates with a large amplitude, as shown with the black solid line in
Figure 8a. To maintain the self-propulsion point, the propeller rotation speed should oscillate, which is practically impossible. Therefore, by tracking the average values of resistance and thrust, the point where the two average values are equal was set as the self-propulsion point. The propeller rotation rate converges as shown in
Figure 8b.
In the free-running state, the added resistance was estimated with Equation (5), which multiplies the difference between the average thrust value and the thrust in calm water by the thrust deduction factor.
As a reference study, using the KCS hull, [
27] Kim et al. (2021) compared the thrust deduction factor in calm water (
) and in wave conditions (
). Through CFD simulations, it was shown that the thrust deduction factor in waves tended to decrease. In particular, the decrease in the thrust deduction coefficient was the largest in the resonance region where the added resistance was the highest. Through this study, we compared the added resistance considering
.
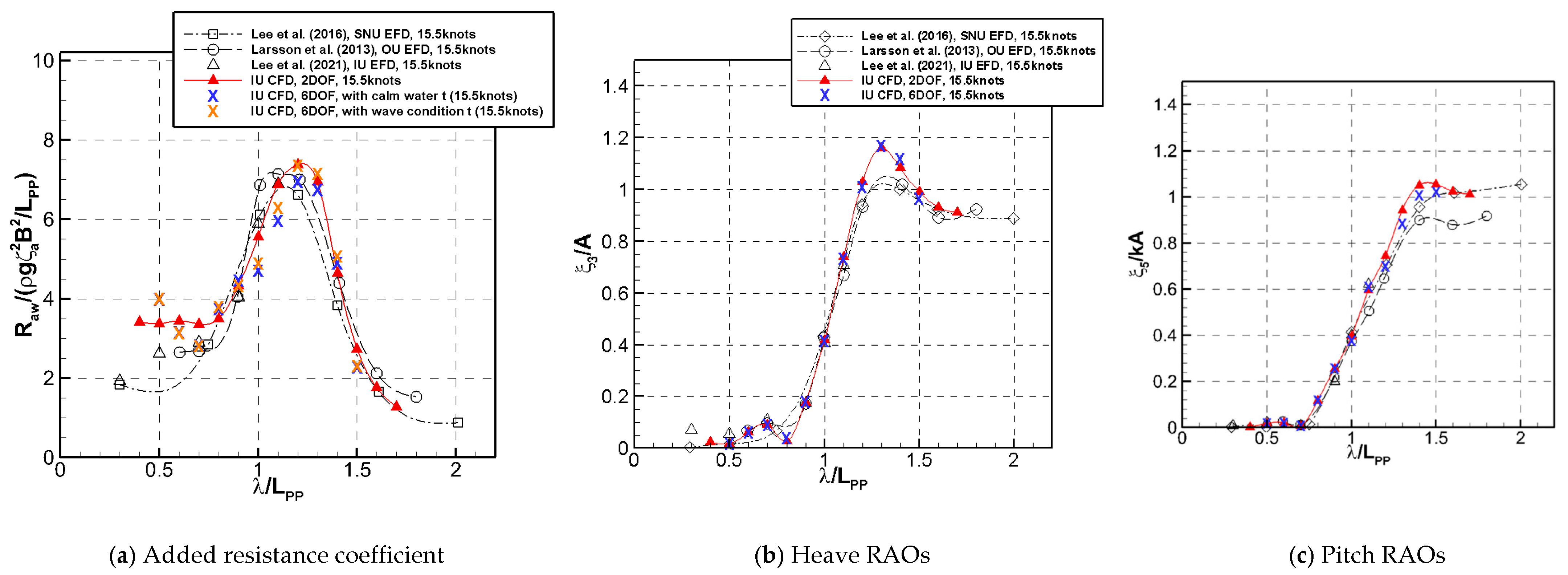
The added resistance coefficient in waves obtained through free running is shown in
Figure 9, which was compared with the 2-DOF captive model results (with free heave and pitch). For the captive model, the results from Seoul National University (SNU) [
28], Osaka University (OU) [
29], and the Inha University Towing Tank (IUTT) [
30] showed similar added resistance performance and motion RAOs. Therefore, the computation results are considered to follow the experimental results well. The added resistance coefficient in waves obtained in the free-running test showed similar results to the captive model, but, when
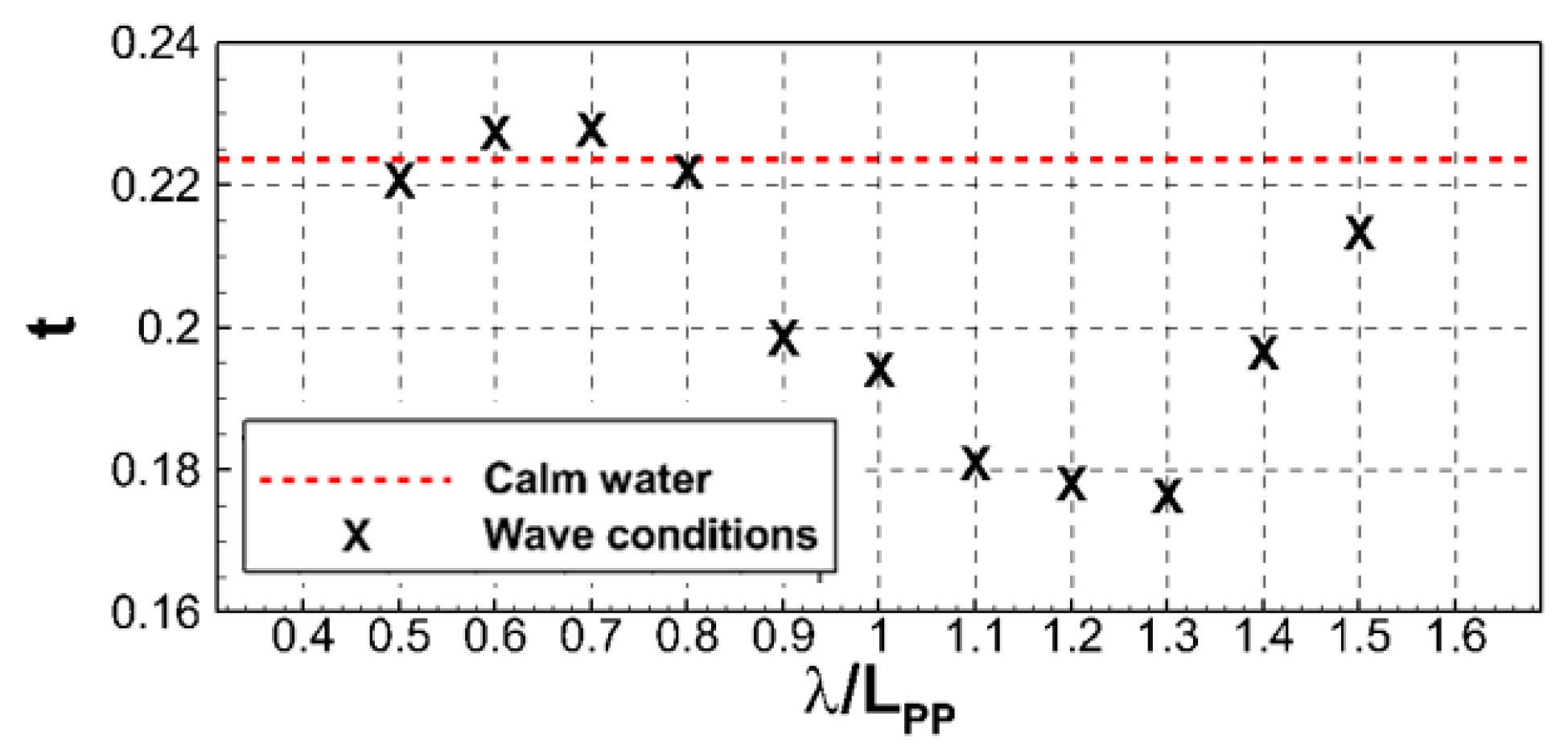
was used, the measured added resistance coefficient was relatively low at the resonance frequency. To examine this,
was compared as shown in
Figure 10.
Lee et al. [
30] compared the stern pressure in calm water and in a wave as a reason for the lower thrust deduction factor. They pointed out that the effect of the pressure change due to the suction of the propeller in the wave is reduced. They judged that the pressure of the stern part due to the movement of the hull during the wave changes regularly and is larger than the pressure changes due to the propeller.
Similarly, in this study, the change in the thrust deduction factor in free running was greatly reduced in the vicinity of the resonance frequency, where the propeller rotation rate is higher. The difference in the thrust deduction factor is not large compared to that in calm water at a short wavelength. As a result, it is reasonable to multiply the thrust difference by when calculating the added resistance coefficient in the wave with free-running conditions. In the case of using , the added resistance near the resonant frequency of the ship was estimated to be relatively low.
2.8. Validation of Generated Regular Wave
A 3D wave test was performed to select CFD analysis conditions and parameters for the added resistance analysis. For the waves used for the 3D wave test,
and
were applied to the S-VLCC with a scale ratio of 68. In the fixed grid system, 100 cells per wavelength and 20 cells per wave height were generated. The domain used in the computation is shown in
Figure 11, and the area where the forcing conditions is applied is shown in
Figure 11. The total number of grid elements was about 3 million, and the variables used in the wave test were reviewed by classifying the time discretization method and inner iterations as shown in
Table 4.
The generated waves, according to the parameters, were compared at the bow position (FP), the middle of the hull (Mid), and the stern position AP. When second-order time discretization was applied through D1I1 and D2I1, the wave dissipation was smaller than that of first-order discretization. Ten inner iterations showed better results compared with a theoretical wave than when eight iterations were applied. Therefore, in this study, D2I2 conditions were applied for the added resistance computations. In addition, the wave amplitude generated through the AMR method at the same domain size was compared, and it was confirmed that the reliability of the generated wave was sufficient when using the same conditions as D2I2.
2.9. Convergence Test and Validation of S-VLCC Resistance Performance in Calm Water
A convergence test was conducted in calm water conditions to verify the calculations. Convergence was determined using the grid convergence index (GCI), which is based on the trend of outcomes from the refinement of the grid and time step [
31]. The convergence parameters, time step, and grid density were evaluated in three stages.
Table 5 shows the GCI of the resistance coefficients, sinkage, and trim.
First, computations were performed while changing the time step. The test was conducted by reducing the time step by 1/2 at 0.04 s, and the resistance, sinkage, and trim showed GCIs of 2.17, 4.07, and 0.87%, respectively. The computation results are sensitive to time step changes, and it was judged that the calculation sufficiently converged when the GCI value was less than 5%. The calculation was carried out based on the smallest time step of 0.01 s.
Next, a convergence test was conducted according to the density of the grid. The test was divided into a case using a fixed grid and a case using an AMR grid. Both grid systems showed a complete convergence of the calculations with a GCI index of less than 1%. In the finest condition, although the difference in the total number of grid elements of the two grids was about 0.8 million, the total computation time was similar. The AMR grid had a small number of grid elements, but it took more computation time until the grid converged, according to the free surface.
To validate the computation, the resistance performance in calm water was tested. The resistance coefficient, sinkage divided by the draft (
), and trim value were checked for differences from the experiment. As shown in
Table 6, a total resistance coefficient with less than 5% difference from the experiment was obtained. There was a slight difference from the experiment in the sinkage and trim values. Although there was a difference in the exact value due to the scale difference from the experiment, it was judged that the CFD result was sufficient to express resistance and motion.
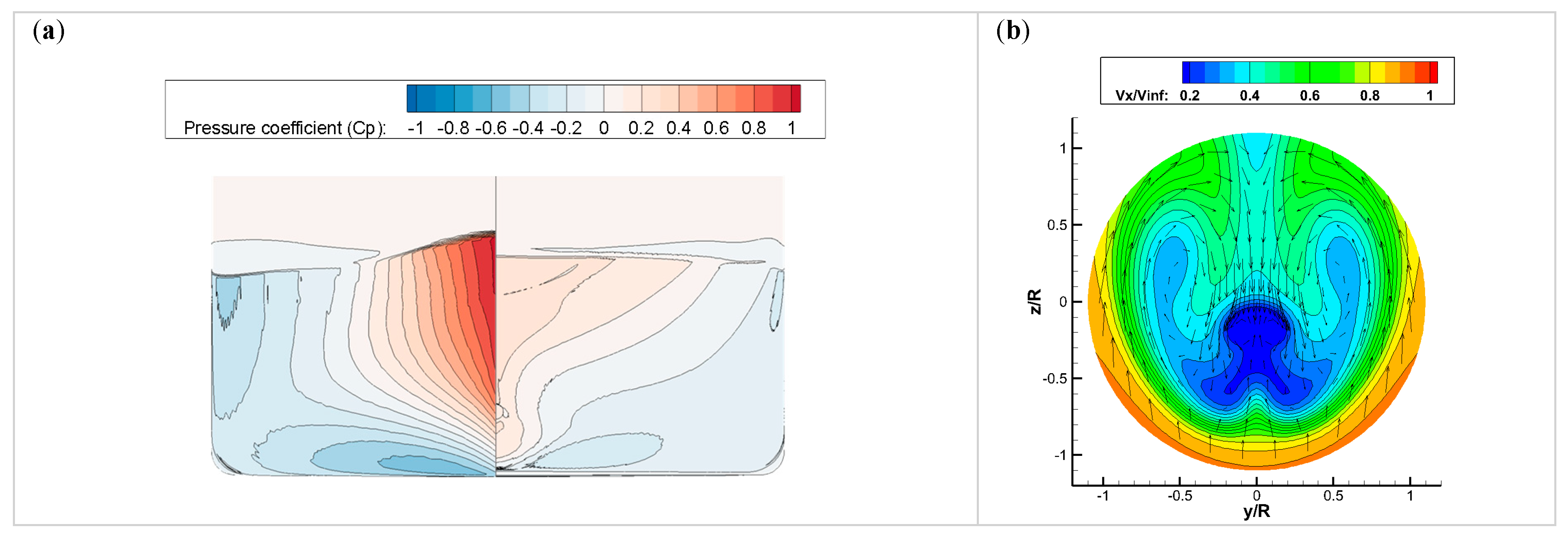
The dynamic pressure coefficient (
) and nominal wake in calm water are shown in
Figure 12. The
is calculated by Equation (6), where
is a pressure,
is a density,
is a water depth from free surface, and
is a velocity. High pressure was observed at the bow part, and, since there was no bulbous bow, the pressure tended to gradually decrease around the center of the hull. Pressure recovery was shown in the stern part and showed the pressure distribution of a general tanker. In the nominal wake distribution in the propeller plane, a distinct hook shape vortex was seen with a blunt stern shape, as shown in
Figure 12b.
4. Conclusions
This study analyzed the added resistance performance of ships in various wave conditions according to constraint conditions through CFD. The target ship’s added resistance coefficient and motion RAOs were compared using a 2-DOF captive model (with free heave and pitch) and a 3-DOF model (with free heave, roll, and pitch). Moreover, a soft spring system and free-running model were applied to simulate 6-DOF conditions. A 6-DOF soft-mooring system was simulated through spring coupling in the DFBI body.
When calculating the added resistance through the free-running model, it was verified through two hulls that the added resistance showed a similar trend compared to the experiment in head sea conditions. On the other hand, both hulls showed a difference in the value of added resistance according to the thrust deduction factor used. It was assumed that the thrust deduction in waves was similar to that of calm water, but, under the conditions of high wave height and high added resistance, a difference in the thrust deduction compared to calm water can be shown due to the increase in the number of propeller revolutions. The difference was relatively insignificant under the condition of a wave steepness of 0.01, but, when using a higher wave steepness, it is necessary to consider the change of the thrust deduction factor in wave conditions.
In terms of the added resistance coefficient, the difference in estimated values was not large according to the DOFs. In a bow-quartering sea, as the heading angle of the ship decreased, the peak wavelength of the added resistance moved to a shorter wavelength, and the magnitude decreased. On the other hand, the added resistance in the free-running condition was lower than with the soft-mooring system. To analyze the cause of the difference, the y-force and z-moment on the hull were compared. The amplitude of fluctuations according to the time series was similar, but the time-averaged y-force and z-moment occurred when soft mooring was used. In addition, the yaw and sway occurred along with force, which is considered to be one of the causes of increased added resistance.
The influence of the heave and pitch motions according to the DOFs (3 DOF and 6 DOF) with a 150-degree heading angle was insignificant. However, in the case of the roll motion, the 3-DOF (with free heave, roll, and pitch) model overestimated the roll motion more than the 6-DOF model. A corresponding trend was also found between the soft-mooring system and free running at the heading angle of 120 degrees. The roll motion is sensitive to the DOFs and depend on the case where the sway and yaw are constrained or interfered with by a spring. Therefore, to accurately estimate the motion response in the oblique waves, a computation should consider the 6-DOF motion of the ship.
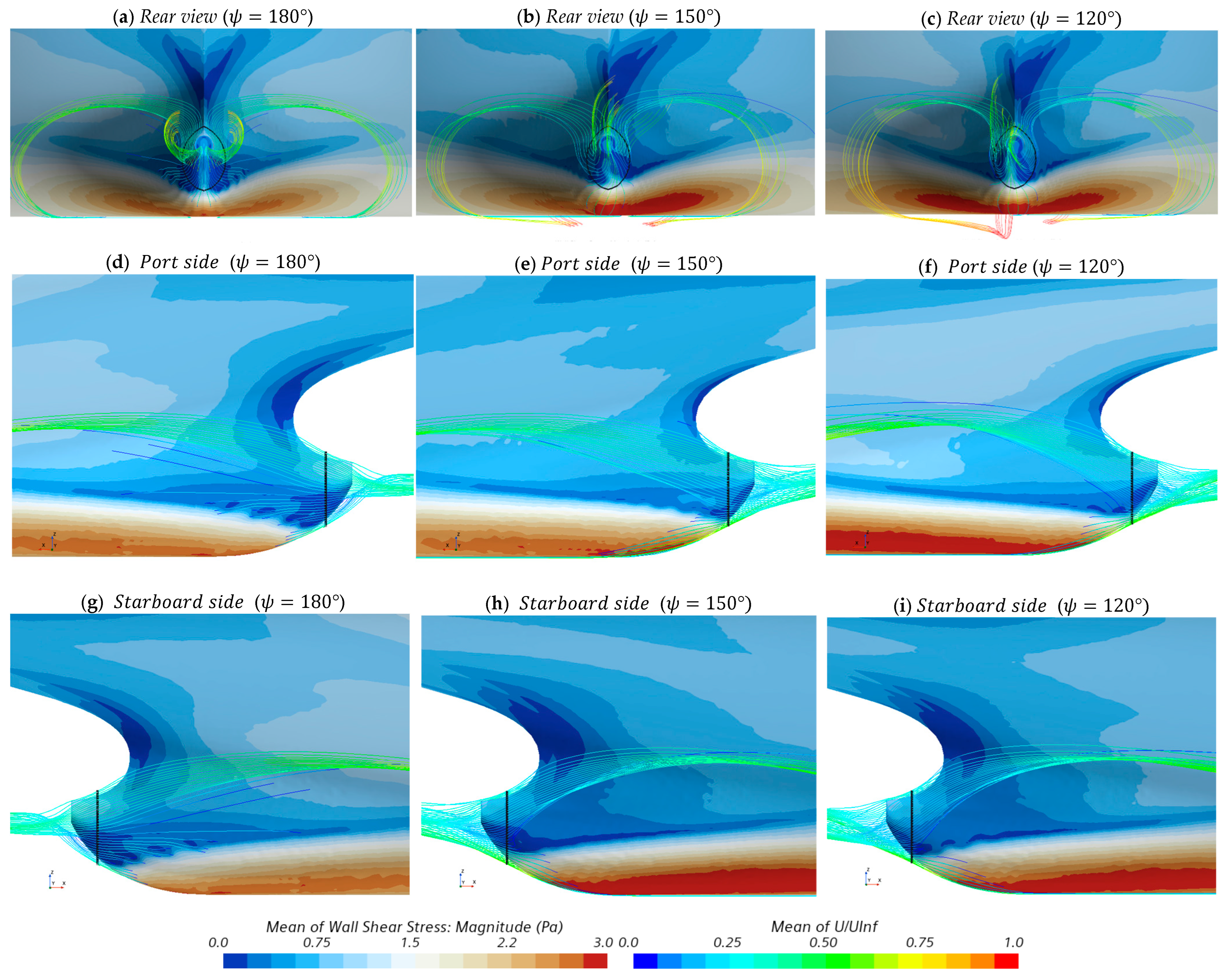
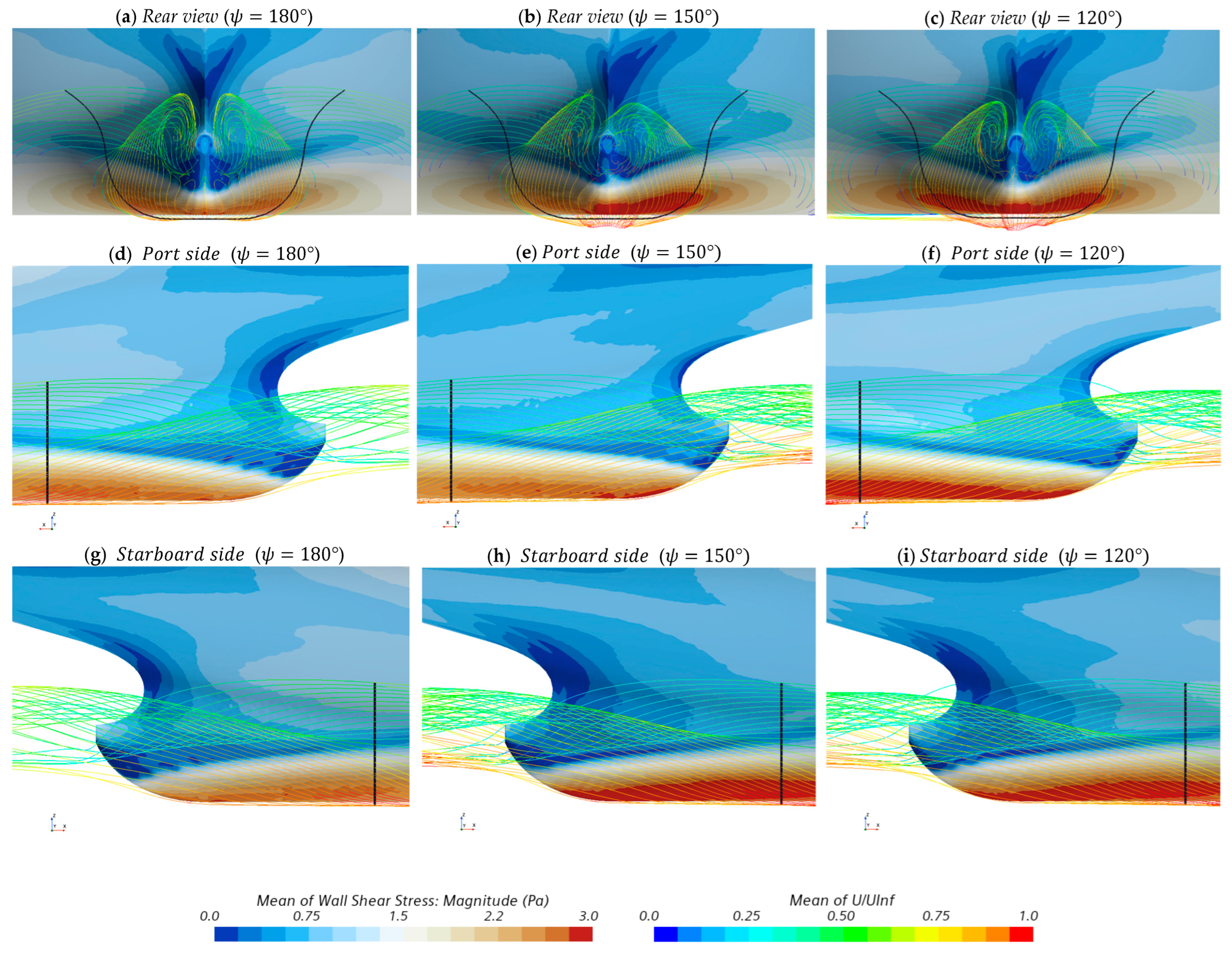
When using the soft-mooring system, it is possible to observe the flow around the hull that occurs along the wave direction. In this study, the streamlines and nominal wake for each heading angle were compared under the condition of a wavelength ratio of 0.1. The streamline passing from the AP position passes the upper part of the wake plane and flows past the hollow of the stern. In the bow-quartering sea condition, the distribution of streamlines on the left and right changes asymmetrically, and the flow on the port side becomes relatively fast, bringing the streamline distribution closer to the keel line. On the other hand, the streamline passing was generally distributed in the wake plane, and the flow past the lower part of the hull was predominant. In particular, it was estimated that the flow was the fastest due to the high shear stress at the heading angle of 120 degrees.
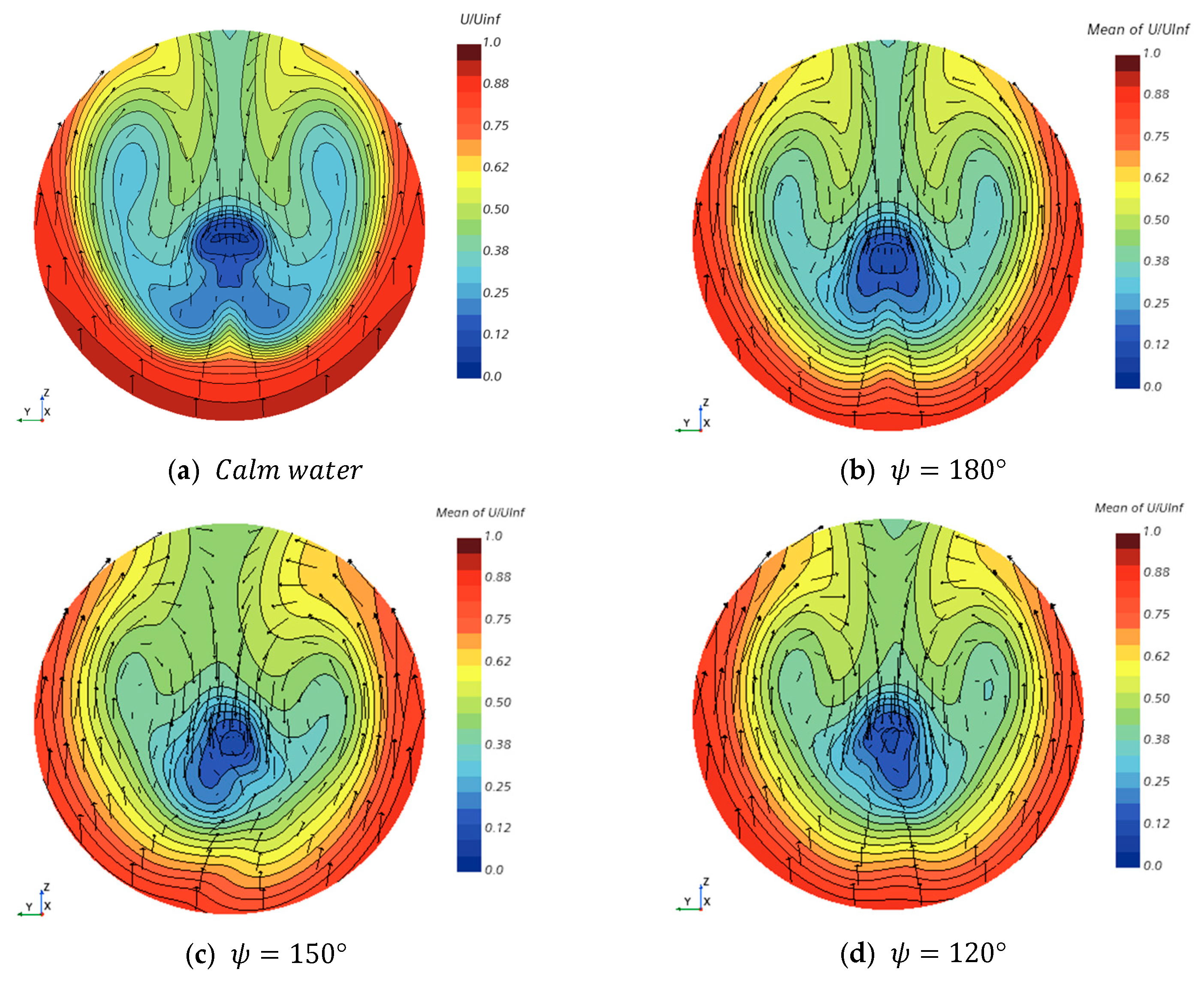
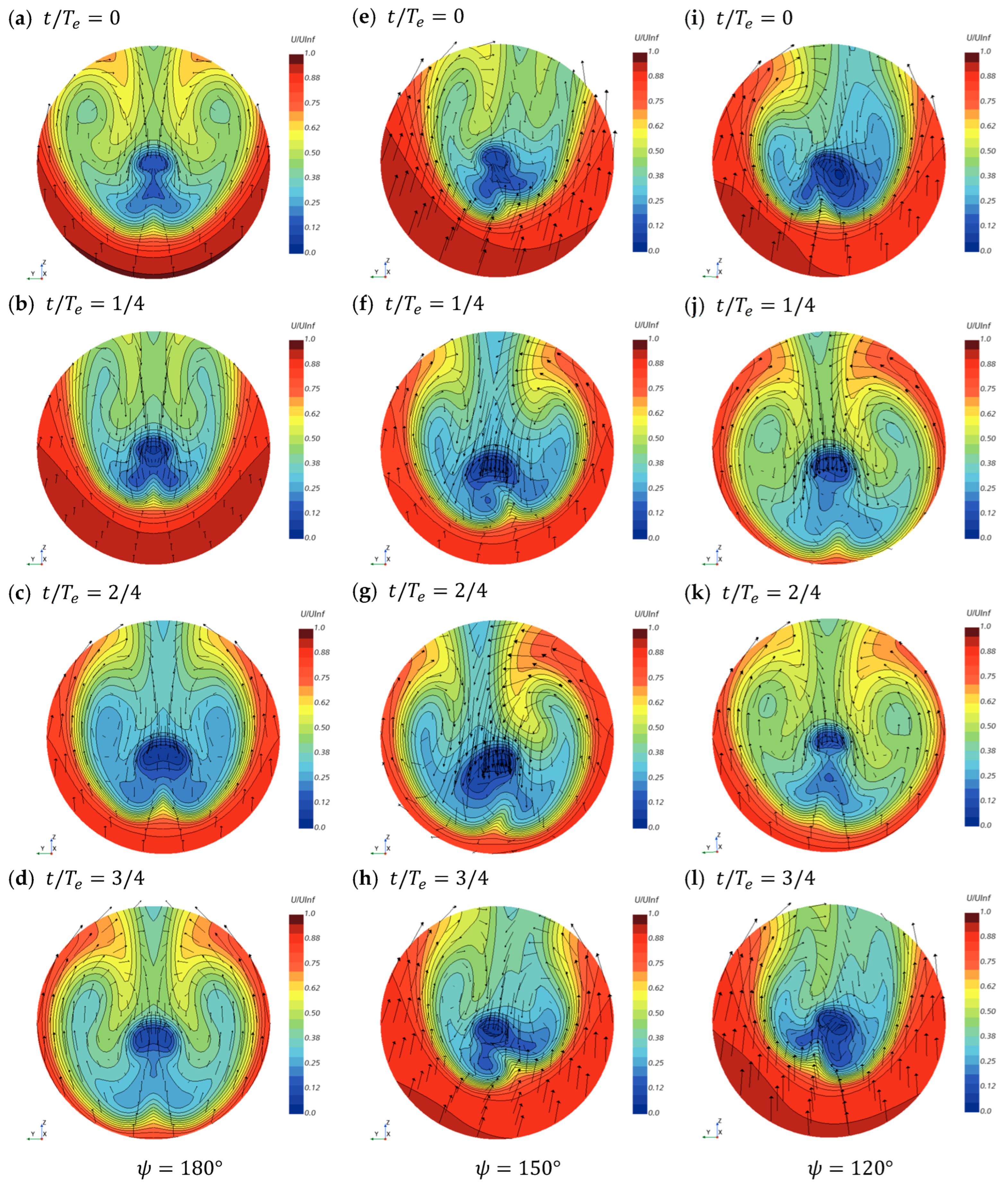
The mean nominal wake flow velocity increased in oblique wave conditions. The asymmetry of the nominal wake was greatest at a heading angle of 150 degrees. The effective wake was difficult to estimate due to the combined effects of the faster axial velocity and the increase in the propeller’s rotational speed. In addition, when comparing the nominal wake distribution for each wave cycle, the wake change for each encounter wave period was large. The main cause of the wake change was the movement of the ship, and the change was most rapid at the heading angle of 150 degrees, where the movement was the largest.
Through this study, it was confirmed that the 6-DOF implementation method used in the experiment can be reproduced through CFD. Through the simulations, there are differences in the added resistance performance and motion response depending on the constraint conditions and test method. In addition, it was shown that the flow distribution around the hull can change significantly in an oblique wave. For future study, the plan is to observe the added resistance performance using a captive model, a soft-mooring system, and free-running conditions for the same vessel. The flow distribution will be compared under more wave conditions, and we will observe changes in the self-propulsion factors and the number of propeller revolutions during free running. Finally, an irregular wave condition will also be tested.

 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}