
Research on Abrasive Particle Target Detection and Feature Extraction for Marine Lubricating Oil

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Oil Abrasive Grain Dataset Construction
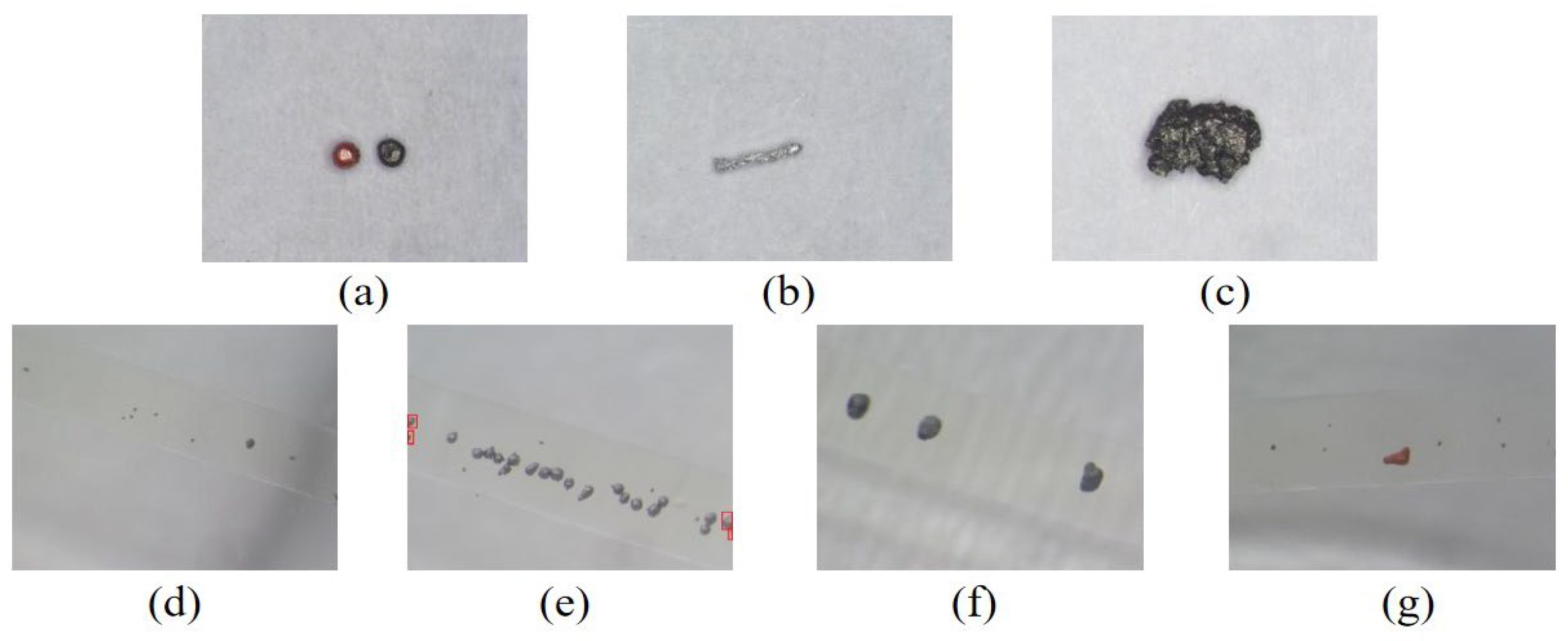
2.1.1. Image Classification Based on Abrasive Particle Shape
2.1.2. Creation of Abrasive Particle Image Dataset
2.2. Constructing a Yolov5-Based WDD Target Detection Model
2.2.1. Network Lightweighting
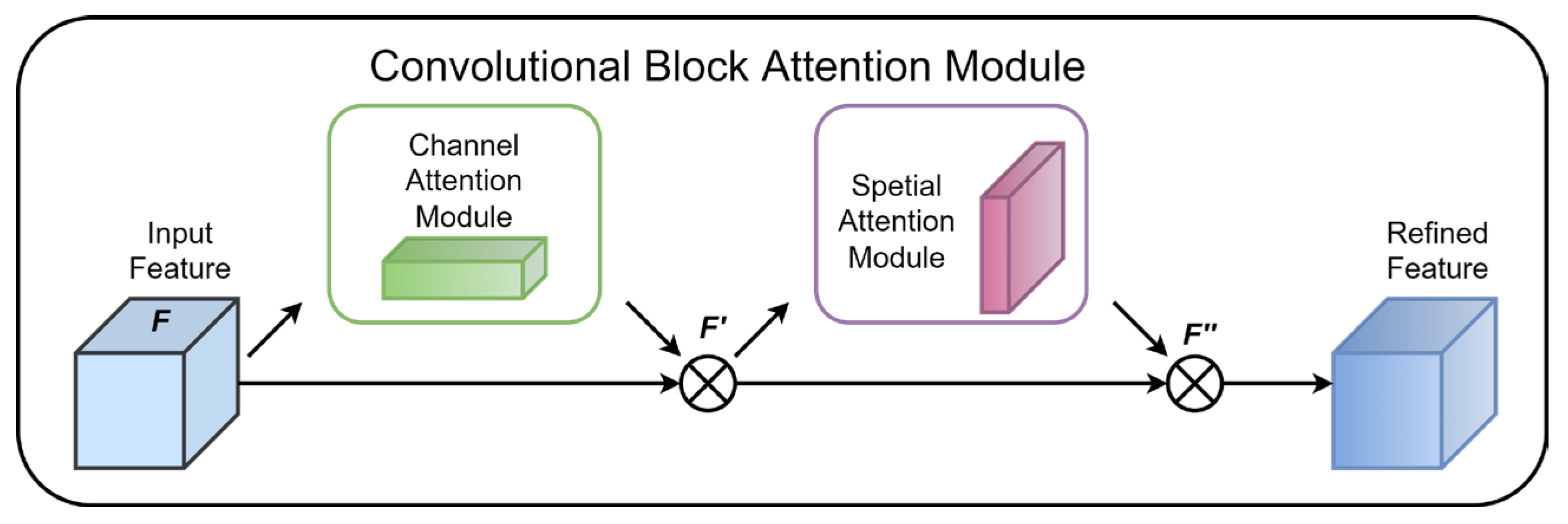
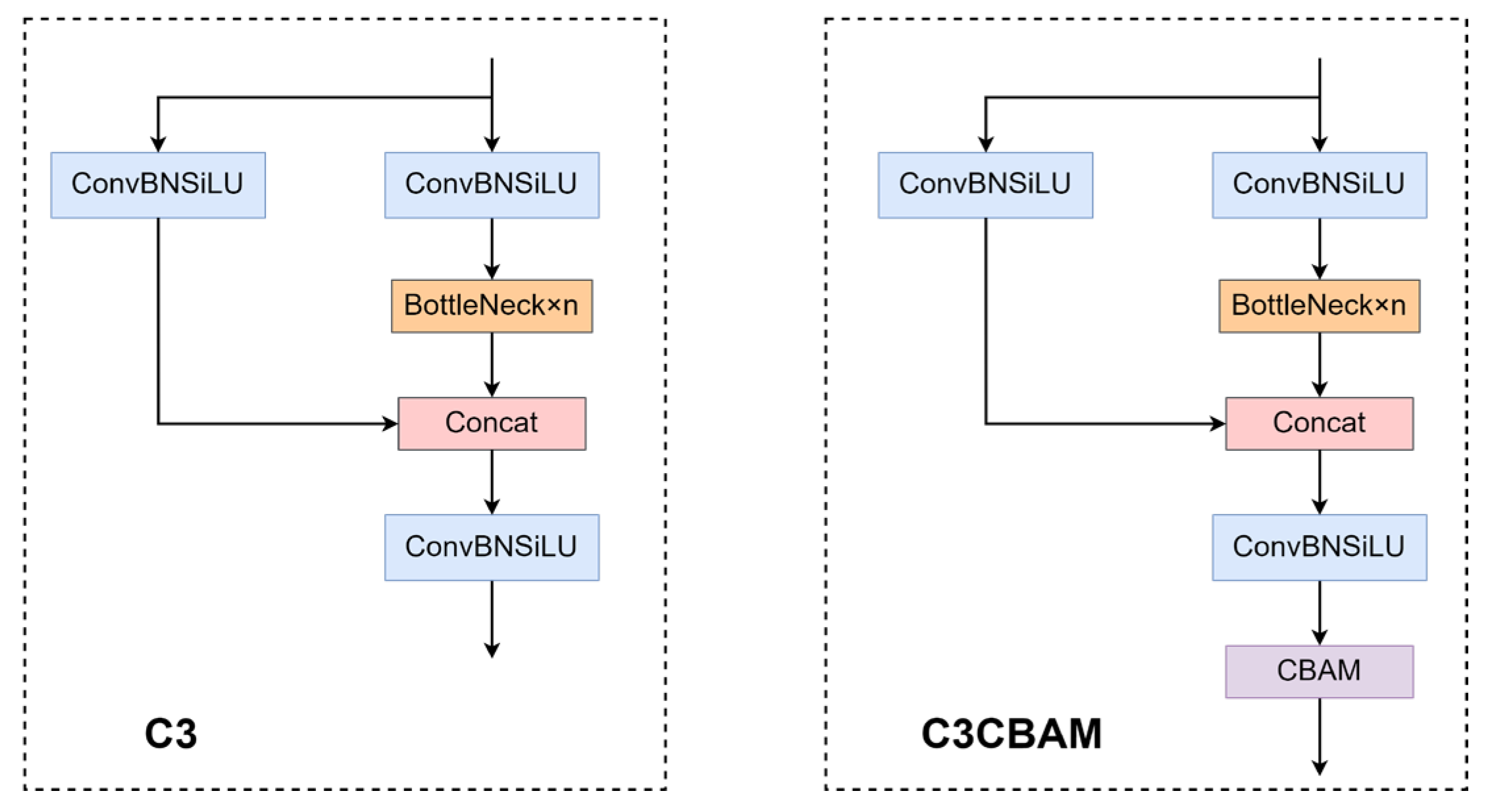
2.2.2. Enhancing the Attention Mechanism of the Model
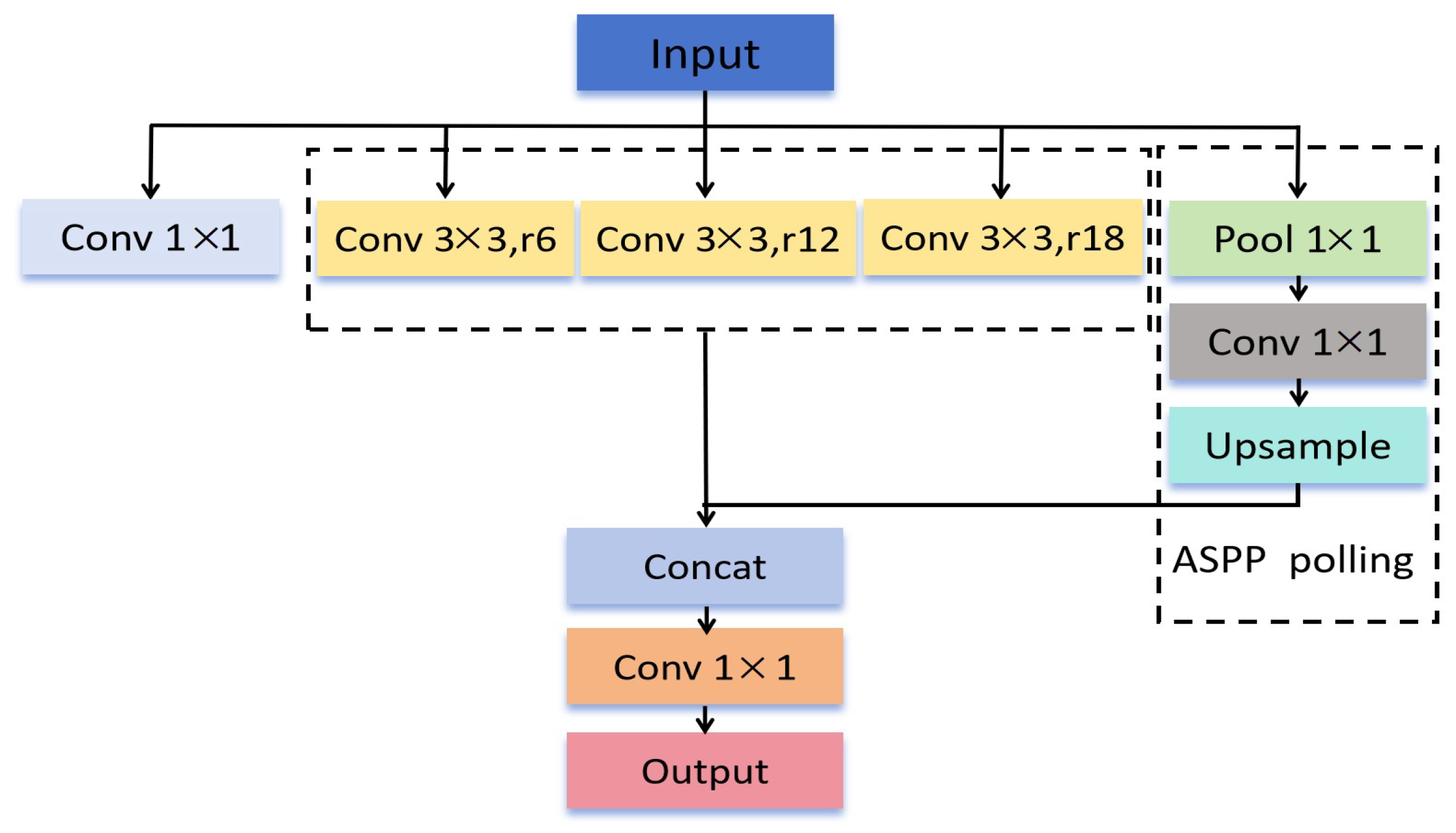
2.2.3. Increase the Model Receptive Field
2.2.4. WDD Target Detection Model Based on YOLOv5
3. Results
3.1. Model Hyper-Parameter Settings
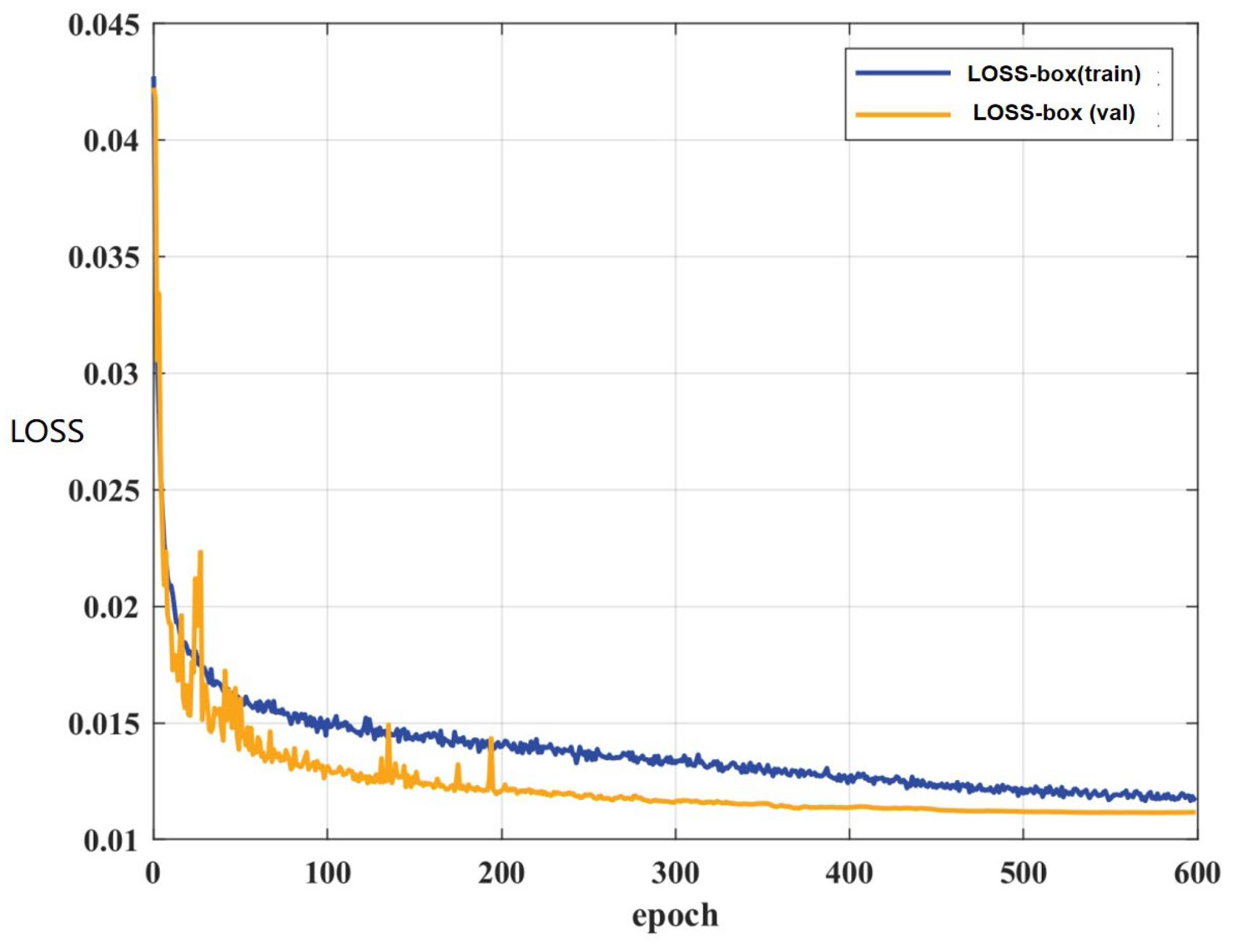
3.2. Model Loss Function
3.3. The Evaluation Index
3.4. WDD Model Performance
3.4.1. Model PR Curve
3.4.2. Comparative Analysis of Model Feature Diagram
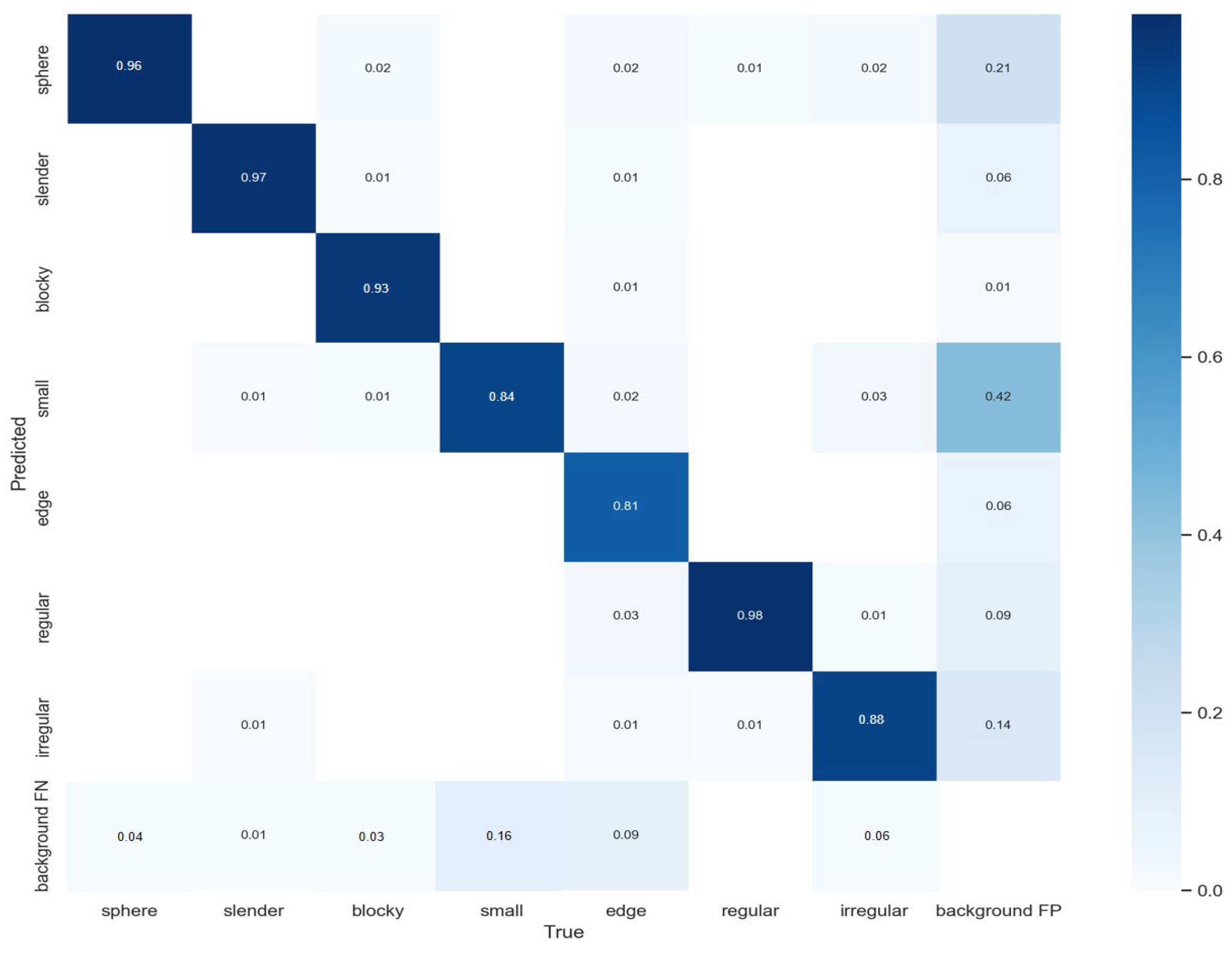
3.4.3. Comparison of Confusion Matrix
3.4.4. Comparison of WDD Model with Other Algorithms
3.4.5. Ablation Experiment
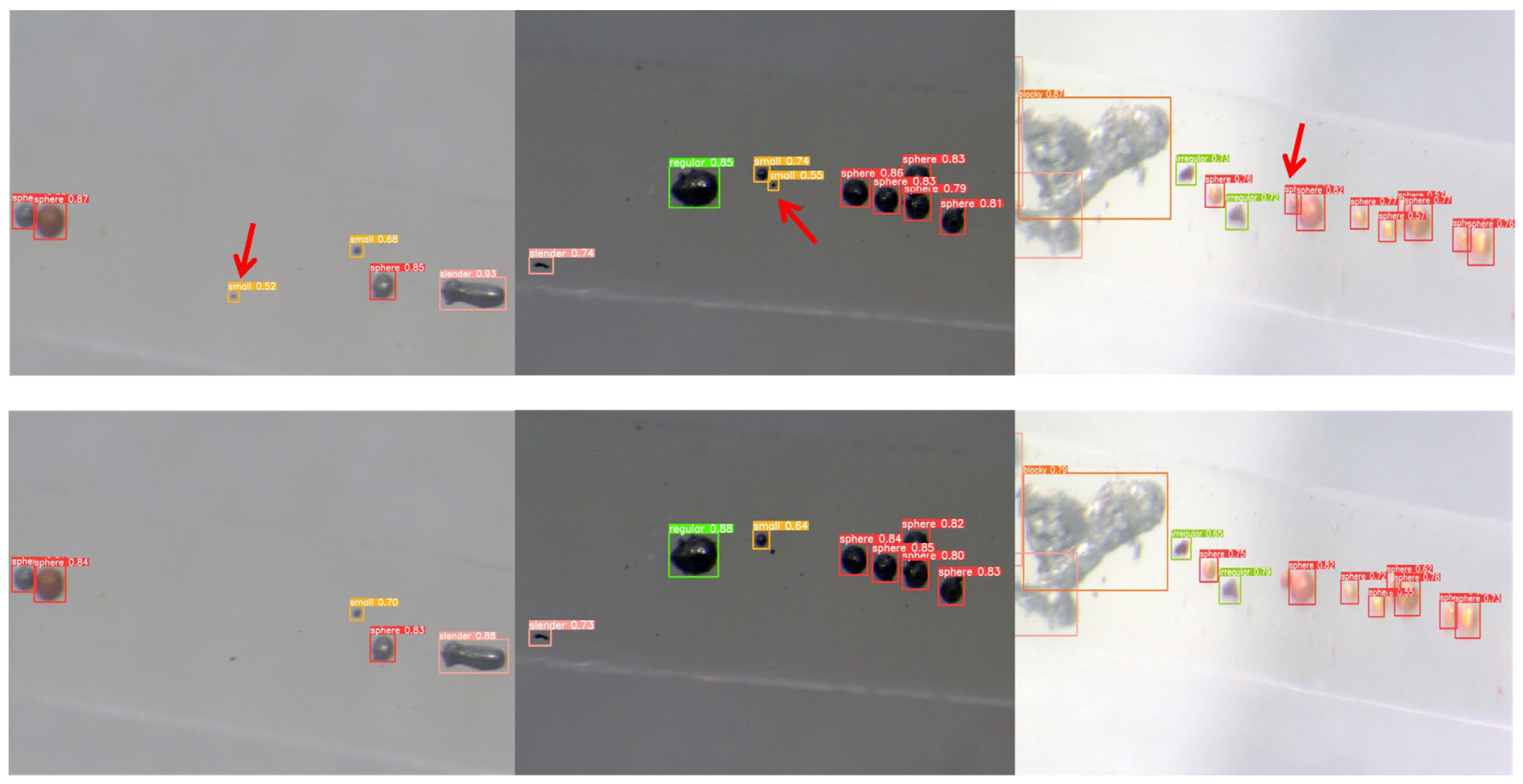
3.4.6. Compared with YOLOv5s Visualization Results
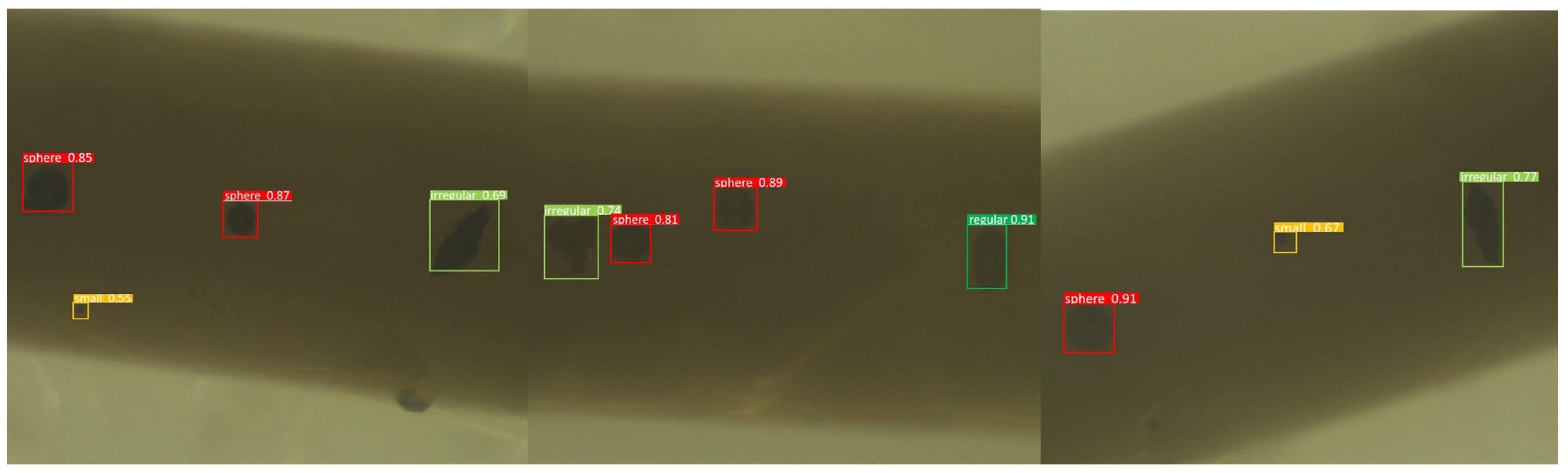
3.4.7. Analysis of the Detection Effect of Real Marine Lubricating Oil Particles
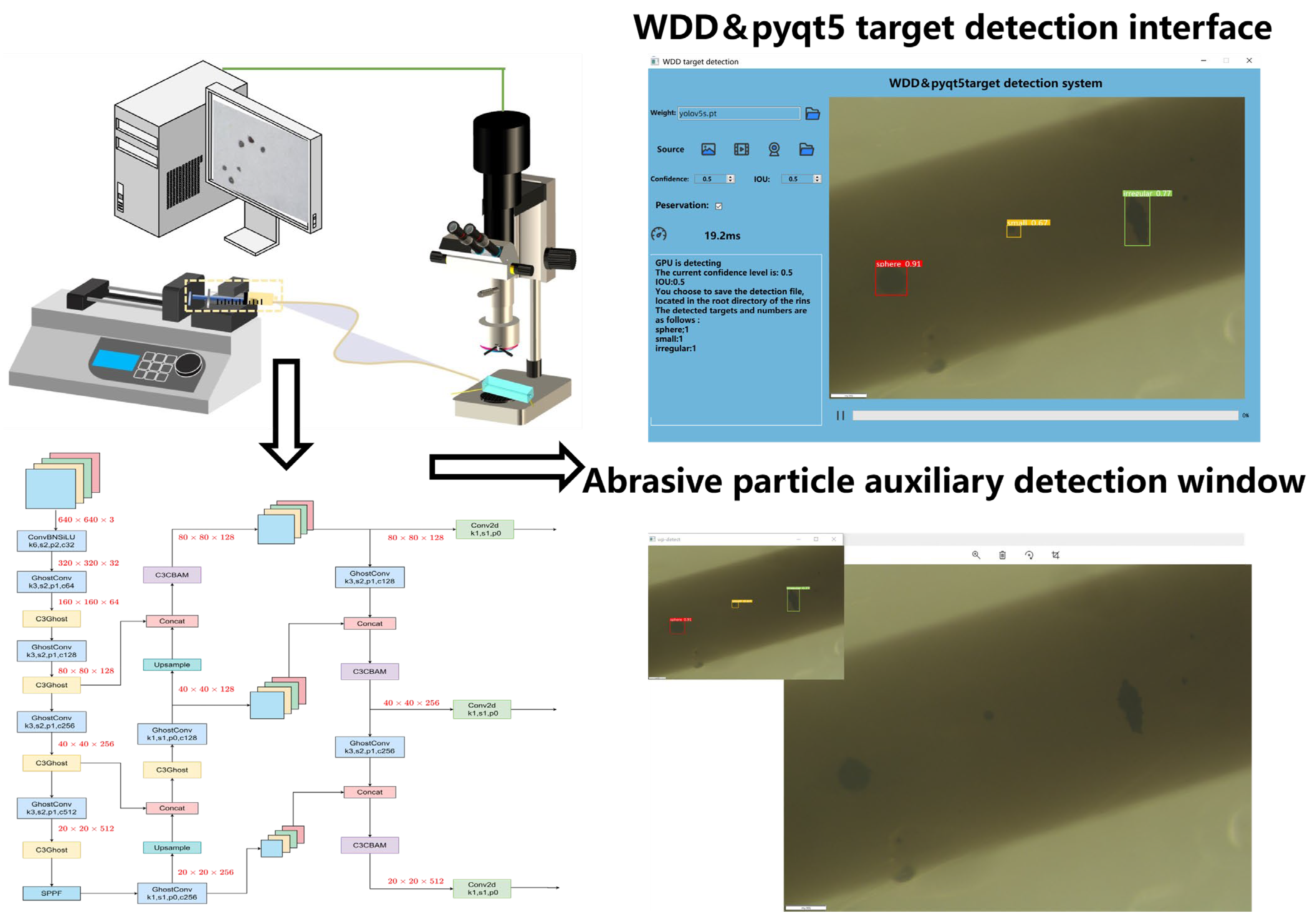
3.4.8. Architecture of the System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Han, W.B.; Mu, X.T.; Liu, Y.; Wang, X.; Zhang, H.P. A Critical Review of on-Line Oil Wear Debris Particle Detection Sensors. J. Mar. Sci. Eng. 2023, 11, 236. [Google Scholar] [CrossRef]
- Bai, C.Z.; Kan, X.M.; Yang, Y.; Yu, S.; Xu, Z.W. Dual-channel Metal Debris Signal Differential Detection Based on Frequency Division Multiplexing. IEEE Sens. J. 2024, 24, 3361551. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Zhang, B.; Fei, Y.; He, Y.; Li, P.; Xu, M. On the Sparse Gradient Denoising Optimization of Neural Network Models for Rolling Bearing Fault Diagnosis Illustrated by a Ship Propulsion System. J. Mar. Sci. Eng. 2022, 10, 1376. [Google Scholar] [CrossRef]
- Wang, X.Y.; Wang, C.Y.; Liu, H.L.; Zhang, H.P.; Bai, C.Z. An Adversarial Single-Domain Generalization Network for Fault Diagnosis of Wind Turbine Gearboxes. J. Mar. Sci. Eng. 2023, 11, 2384. [Google Scholar] [CrossRef]
- Shirmohammadi, S.; Ferrero, A. Camera as the instrument: The rising trend of vision based measurement. IEEE Instru Meas Mag. 2014, 17, 41–47. [Google Scholar] [CrossRef]
- Lin, C.; Chen, W.; Zhou, H.F. Multi-Visual Feature Saliency Detection for Sea-Surface Targets through Improved Sea-Sky-Line Detection. J. Mar. Sci. Eng. 2020, 8, 8100799. [Google Scholar] [CrossRef]
- Tuhtan, J.A.; Nag, S.; Kruusmaa, M. Underwater bioinspired sensing: New opportunities to improve environmental monitoring. IEEE Instru. Meas. Mag. 2020, 23, 30–36. [Google Scholar] [CrossRef]
- Kaushik, A.; Singh, P.; Kumar, H. Experimental comparison of unbonded, agglutinated and sintered SiC-based magnetic abrasive particles in magnetic abrasive finishing process. J. Magn. Magn. Mater. 2023, 587, 171294. [Google Scholar] [CrossRef]
- Beigmoradi, S. Investigation of the ability of low-frequency acoustic energy for polishing of the CK60 steel using a hybrid FE/BE/DEM approach. Comput. Part. Mech. 2022, 9, 1337–1349. [Google Scholar] [CrossRef]
- Deng, H.; Wang, G.; Li, Q.; Sun, Q.Z. Transmissive Single-Pixel Microscopic Imaging through Scattering Media. Sensors 2021, 21, 2721. [Google Scholar] [CrossRef]
- Zhang, Q.; Sun, L.; Chen, J.; Zhou, M.; Hu, M.; Wen, Y. Speeded-Up Robust Features-based image mosaic method for large-scale microscopic hyperspectral pathological imaging. Meas. Sci. Technol. 2021, 32, 035503. [Google Scholar] [CrossRef]
- Zhao, H.; Ke, Z.; Chen, N.; Wang, S.; Gong, X. A new deep learning method for image deblurring in optical microscopic systems. J. Biopkotonics 2020, 13, 201960147. [Google Scholar] [CrossRef]
- Zhai, L.; Ma, X.; Shao, Y.; Zhong, G. Metric and strong metric dimension in commuting graphs of finite groups. Commun. Algebra. 2023, 51, 1000–1010. [Google Scholar] [CrossRef]
- Wang, H.; Liu, M.L.; He, H. Magneto telluric inversion based on BP neural network optimized by genetic algorithm. Chin. J. Geophys. 2018, 61, 1563–1575. [Google Scholar]
- Zhao, S.K.; Chen, B.; Wang, H.; Luo, Z.Y.; Zhang, T. A Feed-Forward Neural Network for Increasing the Hopfield-Network Storage Capacity. Int. J. Neural. Syst. 2022, 32, 2250027. [Google Scholar] [CrossRef]
- Bediaga, I.; Mendizabal, X.; Etxaiz, I.; Munoa, J. An Integrated System for Machine Tool Spindle Head Ball Bearing Fault Detection and Diagnosis. IEEE Instru. Meas. Mag. 2013, 16, 42–47. [Google Scholar] [CrossRef]
- Wang, S.Y.; Fu, X.Y.; Zhao, Y.; Wang, H. Modification of CFAR Algorithm for Oil Spill Detection from SAR Data. Intell. Autom. Soft. Co. 2015, 21, 163–174. [Google Scholar] [CrossRef]
- Li, B.; Xu, J.; Pan, X.X.; Chen, R. Preliminary Investigation on Marine Radar Oil Spill Monitoring Method Using YOLO Model. J. Mar. Sci. Eng. 2023, 11, 670. [Google Scholar] [CrossRef]
- Wang, H.P.; Wan, X.; Yuan, R.J. Rapid Detection of Extra Virgin Olive Oil Based on Supercontinuum Spectroscopy. Spectrosc. Spect. Anal. 2020, 40, 1251–1256. [Google Scholar]
- Wang, Y.H.; Lai, J.Y.; Lo, Y.C.; Lin, P.C. An Image-Based Data-Driven Model for Texture Inspection of Ground Workpieces. Sensors 2022, 22, 5192. [Google Scholar] [CrossRef]
- Tang, H.S.; Ren, Y.; Zhang, X.L. Tribological performance of MoS2 coating on slipper pair in axial piston pump. J. Cent. South Univ. 2020, 27, 1515–1529. [Google Scholar] [CrossRef]
- Somaweera, H.; Estlack, Z.; Devadhasan, J.P.; Kim, J. Characterization and Optimization of Isotachophoresis Parameters for Pacific Blue Succinimidyl Ester Dye on a PDMS Microfluidic Chip. Micromachines 2020, 11, 951. [Google Scholar] [CrossRef]
- Khoshboresh, M.; Hasanlou, M. Improving hyperspectral sub-pixel target detection in multiple target signatures using a revised replacement signal model. Eur. J. Remote. Sens. 2020, 53, 316–330. [Google Scholar] [CrossRef]
- Jiang, Y.H.; Dong, L.L.; Chen, Y.; Xu, W.H. An Infrared Small Target Detection Algorithm Based on Peak Aggregation and Gaussian Discrimination. IEEE. Access. 2020, 8, 106214–106225. [Google Scholar] [CrossRef]
- Abdelhamid, A.; Alotaibi, S.R.; Mousa, A. Deep learning-based prototyping of android GUI from hand-drawn mockups. IET. Software 2020, 14, 816–824. [Google Scholar] [CrossRef]
- Ren, P.M.; Wang, L.; Fang, W.; Song, S.L.; Djahel, S. A novel squeeze YOLO-based real-time people counting approach. Int. J. Bio-Inspir. Com. 2020, 16, 94–101. [Google Scholar] [CrossRef]
- Liu, J.H.; Wang, C.Y.; Su, H.; Du, B.; Tao, D.C. Multistage GAN for Fabric Defect Detection. IEEE. Trans. Image. Process. 2020, 29, 3388–3400. [Google Scholar] [CrossRef]
- Aguerre, N.V.; Bajo, M.T.; Carlos, J. Dual mechanisms of cognitive control in mindful individuals. Psychol. Res. Psych. 2021, 85, 1909–1921. [Google Scholar] [CrossRef]
- Guan, X.Y.; Frenkel, S. Organizational support and employee thriving at work: Exploring the underlying mechanisms. Pers. Rev. 2021, 50, 935–953. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I. Semantic image segmentation with deep convolutional nets and fully connected CRFs. Computer. Sci. 2014, 4, 357–361. [Google Scholar]
- Ziengler, T.; Fritschie, M.; Kuhn, L. Efficient Smoothing of Dilated Convolutions for Image Segmentation. arXiv 2019, arXiv:1903.07992 . [Google Scholar]
- Shang, X.N.; Chen, Z.B.; Sun, G.D.; Yang, G.X. Data collection in sensor nets with heterogeneous duty cycles: Pursuit of efficient opportunity. Eurasip. J. Wirel. Commun. Netw. 2018, 4, 97. [Google Scholar] [CrossRef]
- Xu, X.Y.; Zhao, M.; Shi, P.X.; Ren, R.Q.; He, X.H. Crack Detection and Comparison Study Based on Faster R-CNN and Mask R-CNN. Sensors 2022, 22, 1215. [Google Scholar] [CrossRef] [PubMed]
- Deng, L.X.; Li, H.; Liu, H.; Gu, J. A lightweight YOLOv3 algorithm used for safety helmet detection. Sci. Rep. 2022, 12, 10981. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Chen, J.; Huang, Z.; Yuan, H.; Li, P. Improved YOLOv7-Based Algorithm for Detecting Foreign Objects on the Roof of a Subway Vehicle. Sensors 2023, 23, 9440. [Google Scholar] [CrossRef]
- Li, S.; Huang, H.; Meng, X.; Wang, M. A Glove-Wearing Detection Algorithm Based on Improved YOLOv8. Sensors 2023, 23, 9906. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyper-Parameter | Depth Multiple | Width Multiple | Initial Learning Rate | Final Learning Rate | Learning Momentum | Weight Decay |
|---|---|---|---|---|---|---|
| Value | 0.33 | 0.50 | 0.00334 | 0.15135 | 0.74832 | 0.00025 |
| Detection | Backbone | mAP0.5 | mAP0.5:0.95 | FPS |
|---|---|---|---|---|
| Faster R-CNN | ResNet50 | 0.883 | 0.475 | 13 |
| YOLOv3 | Darknet53 | 0.869 | 0.546 | 31 |
| YOLOv5s | CSPDarknet53 | 0.864 | 0.538 | 57 |
| YOLOv5m | CSPDarknet53 | 0.875 | 0.553 | 44 |
| YOLOv7 | CSPDarknet53 | 0.903 | 0.545 | 34 |
| YOLOv8s | CSPDarknet53 | 0.882 | 0.558 | 53 |
| WDD | Improved CSPDarknet53 | 0.912 | 0.564 | 55 |
| Detection | P | R | mAP 0.5 | FPS |
| YOLOv5s | 0.918 | 0.942 | 0.864 | 57 |
| +Ghost | 0.921 | 0.938 | 0.835 | 61 |
| +CBAM | 0.939 | 0.962 | 0.866 | 53 |
| +ASPP | 0.945 | 0.954 | 0.891 | 49 |
| +Ghost&CBAM | 0.943 | 0.967 | 0.887 | 58 |
| +Ghost&ASSP | 0.941 | 0.953 | 0.885 | 56 |
| +CBAM&ASSP | 0.962 | 0.971 | 0.905 | 47 |
| +Ghost&CBAM&ASSP | 0.965 | 0.978 | 0.912 | 55 |
| Class | P | R | mAP 0.5 |
|---|---|---|---|
| Spherical particle | 0.976 | 0.968 | 0.973 |
| Strip particle | 0.907 | 0.935 | 0.904 |
| Block particle | 0.919 | 0.942 | 0.902 |
| Tiny particle | 0.834 | 0.714 | 0.801 |
| Edge particle | 0.905 | 0.905 | 0.916 |
| Elliptical particle | 0.941 | 0.934 | 0.939 |
| Irregular particle | 0.788 | 0.878 | 0.768 |
| All classes | 0.906 | 0.903 | 0.898 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, C.; Ding, J.; Zhang, H.; Xu, Z.; Liu, H.; Li, W.; Li, G.; Wei, Y.; Wang, J. Research on Abrasive Particle Target Detection and Feature Extraction for Marine Lubricating Oil. J. Mar. Sci. Eng. 2024, 12, 677. https://doi.org/10.3390/jmse12040677
Bai C, Ding J, Zhang H, Xu Z, Liu H, Li W, Li G, Wei Y, Wang J. Research on Abrasive Particle Target Detection and Feature Extraction for Marine Lubricating Oil. Journal of Marine Science and Engineering. 2024; 12(4):677. https://doi.org/10.3390/jmse12040677
Chicago/Turabian StyleBai, Chenzhao, Jiaqi Ding, Hongpeng Zhang, Zhiwei Xu, Hanlin Liu, Wei Li, Guobin Li, Yi Wei, and Jizhe Wang. 2024. "Research on Abrasive Particle Target Detection and Feature Extraction for Marine Lubricating Oil" Journal of Marine Science and Engineering 12, no. 4: 677. https://doi.org/10.3390/jmse12040677