
A Novel Positional Calibration Method for an Underwater Acoustic Beacon Array Based on the Equivalent Virtual Long Baseline Positioning Model


Abstract
1. Introduction
2. Model of EVLBL
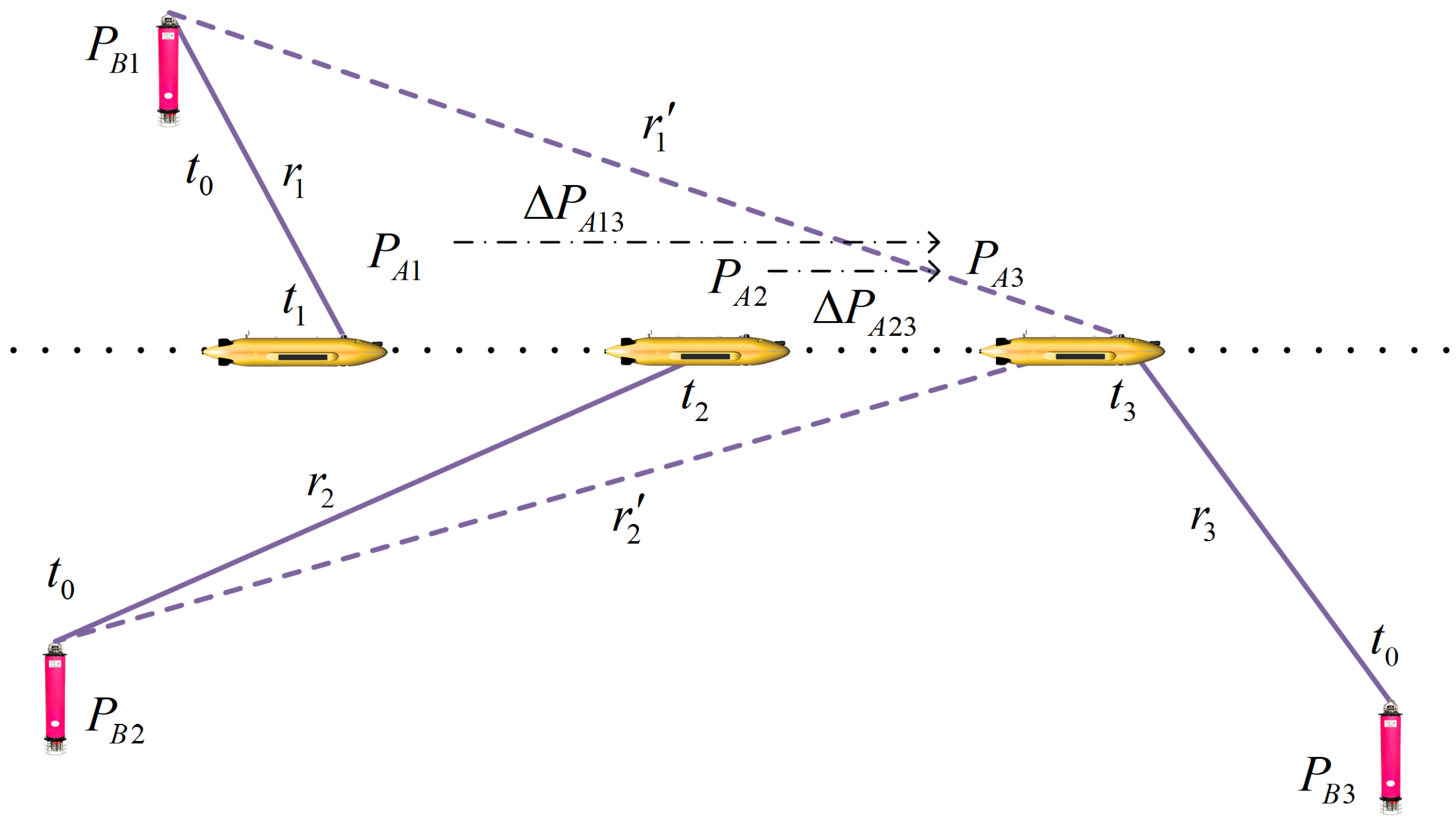
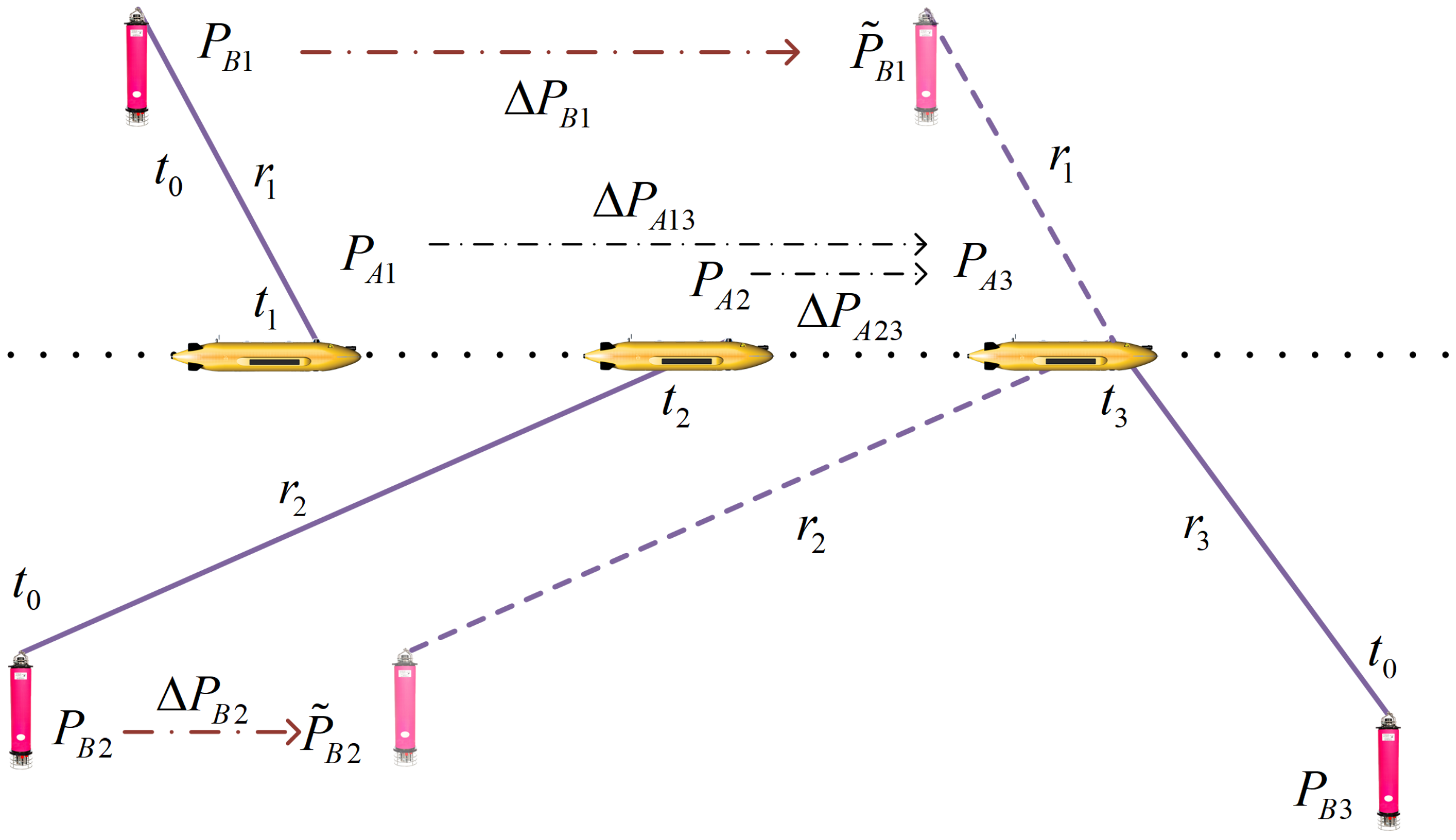
2.1. Analysis of LBL Positioning Errors Caused by AUV Motion
2.2. EVLBL Positioning Model Based on Dead Reckoning
3. Overall Calibration Method for Acoustic Beacon Array
3.1. Calibration Method Based on Trajectory Deviations
3.2. Implementation of Beacon Calibration Method Based on PSO
| Algorithm 1 Calibration method of acoustic beacon array based on PSO. |
|
4. Simulation
4.1. Conditions for the Simulation
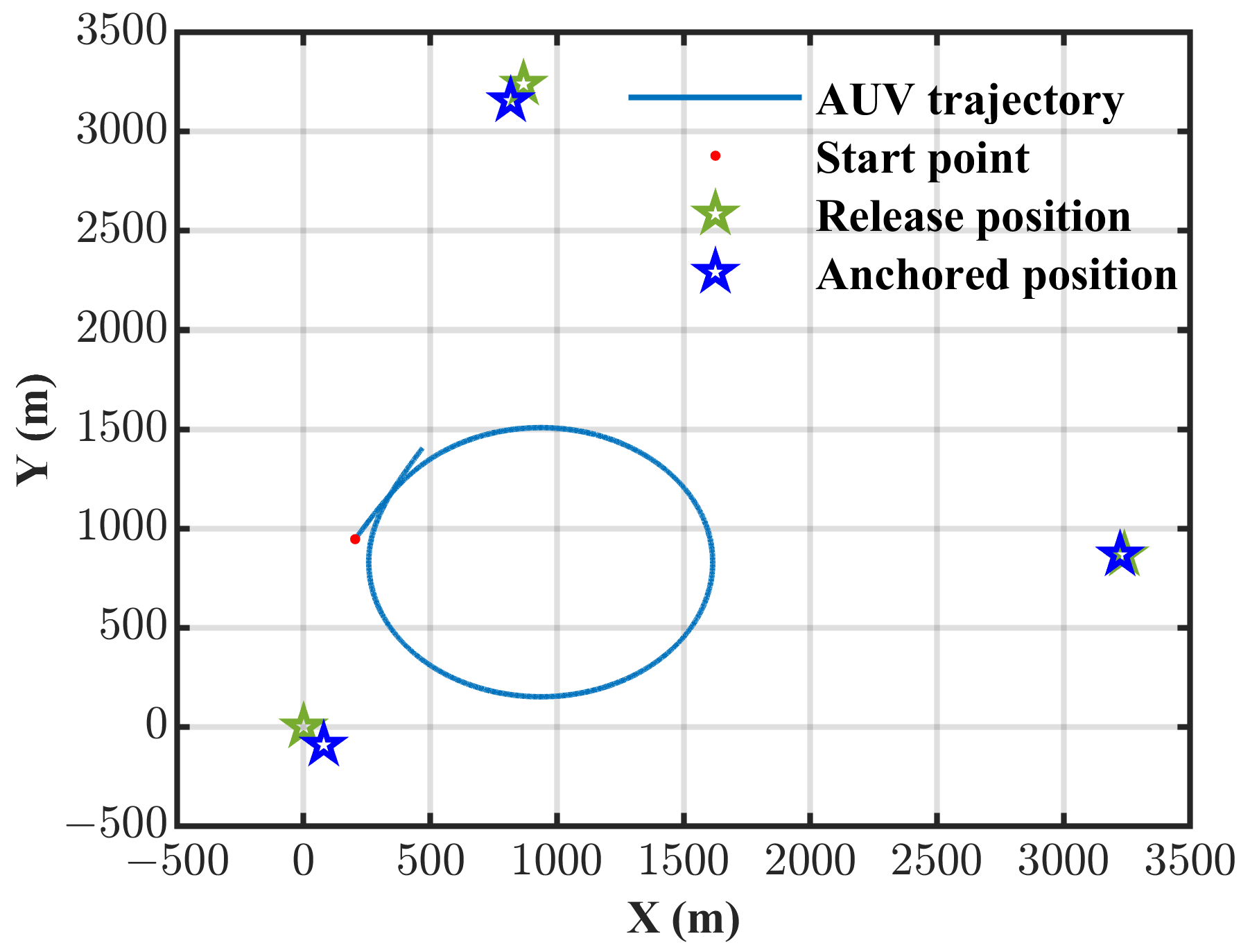
- The distribution of the underwater acoustic beacons within the array is depicted in Figure 5. The green stars represent the release positions of the beacons, indicating the coordinates where the beacons were deployed on the water surface. The blue stars indicate the anchored positions of the beacons, representing their actual locations on the seabed after being influenced by factors such as water currents. The specific positions are detailed in Table 1.
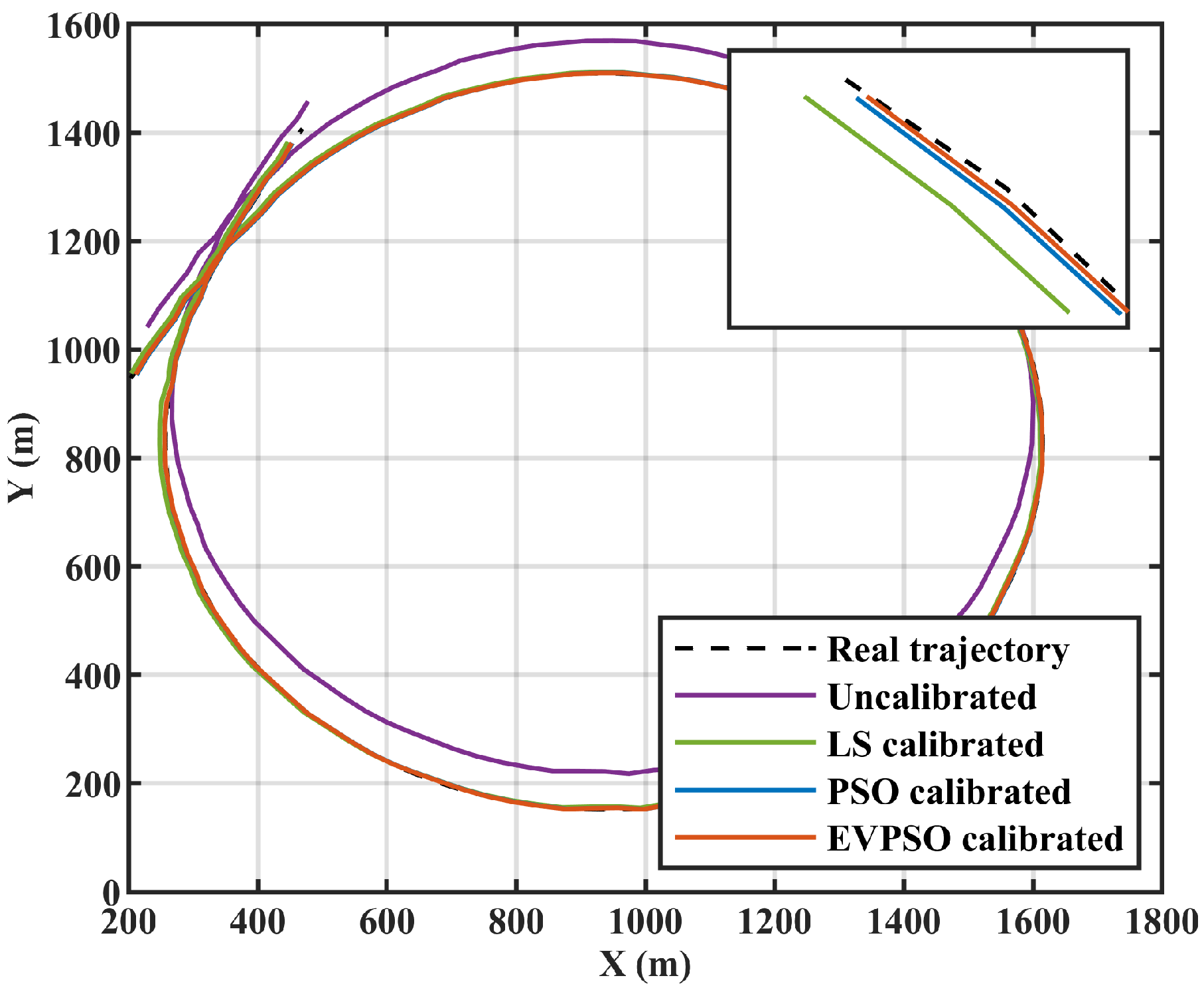
- The simulated trajectory of the AUV is illustrated in Figure 5. The trajectory began from and then underwent a continuous spiral descent motion lasting for 1200 s at a constant speed. Throughout the entire process, the AUV completed a clockwise rotation of 360.0 degrees to simulate the motion state in a real ocean environment.
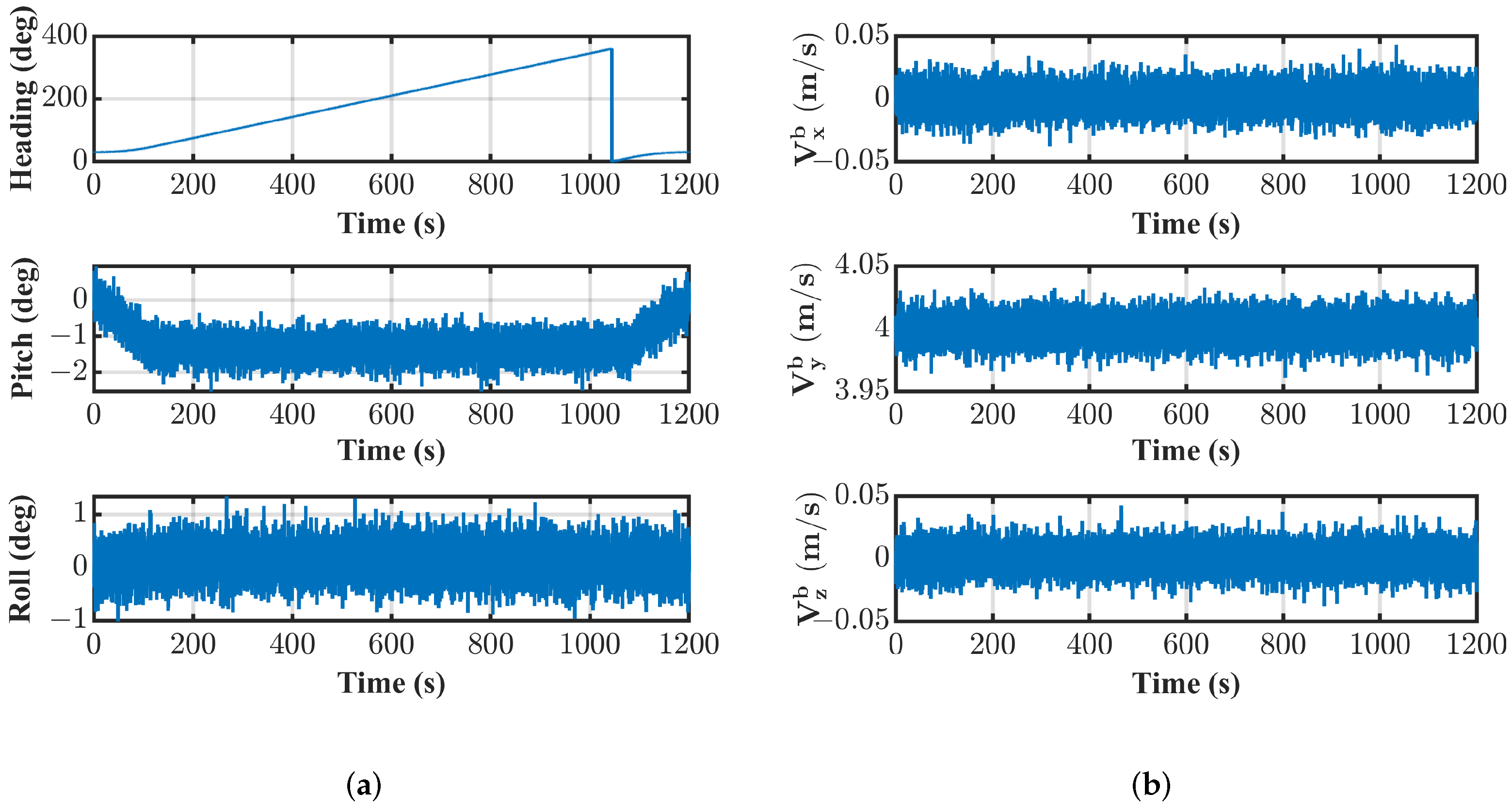
- The AUV travelled in a clockwise direction, with the heading angle increasing from 30.0 degrees at a constant angular velocity, completing one full rotation. The pitch angle decreased uniformly from 0 to around −1.5 degrees during the spiral descent process and remained constant, uniformly returning to 0 before the end of the trajectory. The roll angle fluctuated near 0 throughout. The specific attitude angle data are shown in Figure 6a.
- The forward velocity of the AUV maintained a constant speed of 4.00 m/s, while the right velocity and upward velocity remained near 0. Specific data are shown in Figure 6b.
- The measurement noise for each attitude angle of the compass was white noise with a standard deviation of 0.30°.
- The measurement noise for the velocity in each direction of the DVL was white noise with a standard deviation of 0.01 m/s.
- The ranging error of the underwater acoustic beacon was specified as 0.1% of the slant range, which was compounded with white noise with a standard deviation of 0.1 m.
4.2. Results and Discussion of the Simulation
5. Conclusions
- As the trajectory of the AUV diverged further from the center of the beacon array and its velocity increased, the errors in the conventional LBL positioning model correspondingly enlarged. The EVLBL positioning model introduced in this study mitigated the positional discrepancies that arose from AUV motion, thereby notably enhancing the accuracy of the localization.
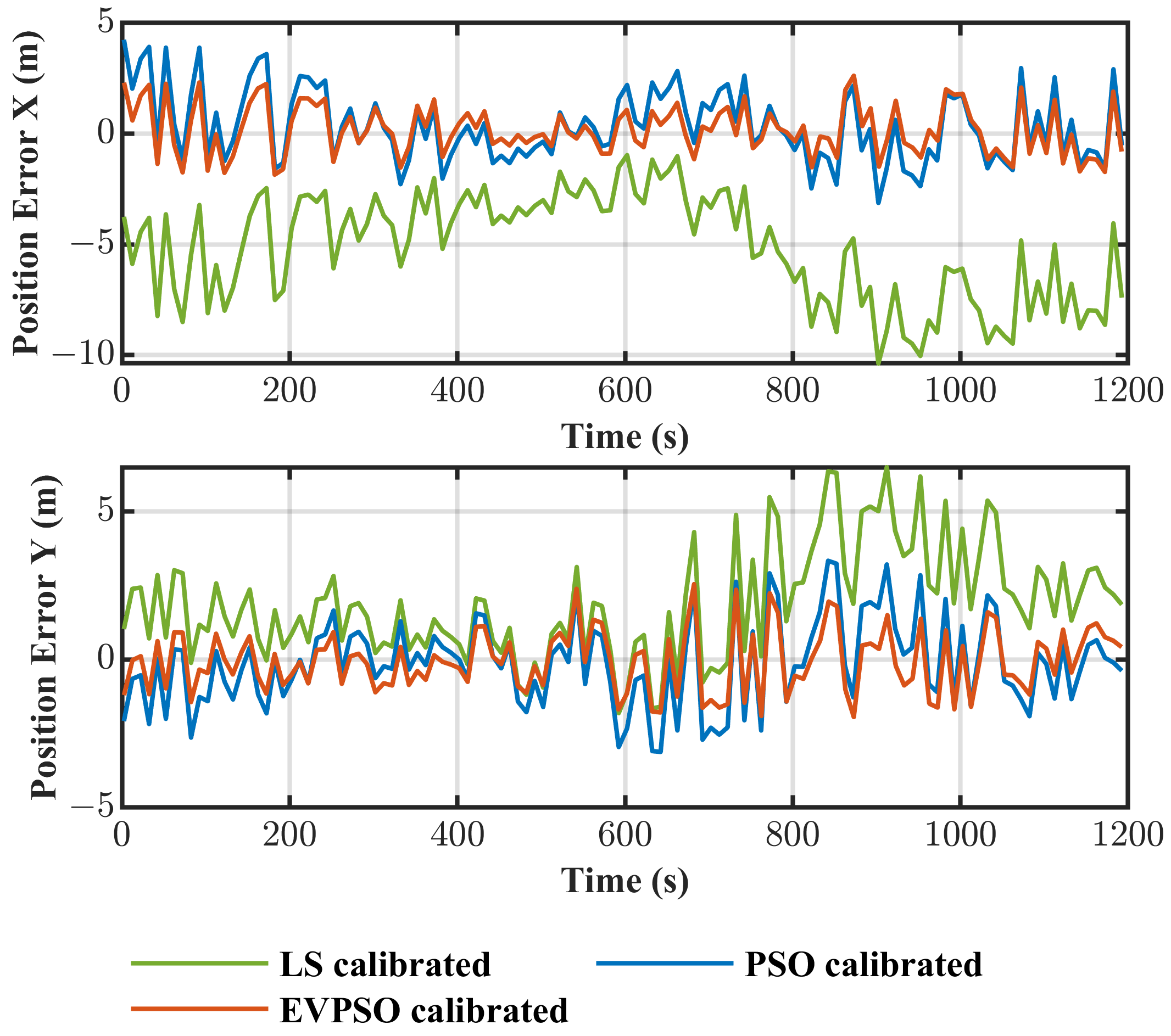
- Compared with the conventional LS method based on individual beacon data calibration, the proposed overall calibration method for beacon arrays based on the LBL trajectory overlap demonstrated significant advantages in terms of the calibration accuracy and stability. In the simulation experiments, the LS method exhibited large calibration errors for beacons distant from the AUV trajectory (up to 6.40 m). In contrast, the PSO algorithm demonstrated balanced calibration errors across all beacons, with the average error controlled around 3.00 m. This not only enhanced the calibration accuracy but also significantly improved the efficiency of the beacon calibration.
- When comparing the performances of various algorithms, the EVPSO algorithm exhibited a higher precision in the beacon array calibration, which was attributable to its comprehensive consideration of both the AUV’s motion and beacon position errors. The simulation experiments revealed that the calibration errors of the EVPSO algorithm for individual beacons were contained within 1.00 m, marking a notable enhancement in calibration accuracy compared with the PSO, which averaged around 3.00 m.
- By comparing the RMSE of the LBL system after the beacon array was calibrated using various methods, it became evident that the EVPSO algorithm, with an RMSE of approximately 1.00 m, significantly outperformed both the PSO algorithm (RMSE ≈ 1.50 m) and the LS algorithm (RMSE > 5.00 m). This outcome reinforced the validity and precision of the overall calibration method for underwater beacon arrays proposed in this paper, which was based on the EVLBL positioning model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aiello, G. Marine Geological Studies of the Bay of Naples (Southern Tyrrhenian Sea, Italy): Revised Applications of the Seismo-Stratigraphic Concepts and Evolving Technologies to a Late Quaternary Volcanic Area. J. Mar. Sci. Eng. 2024, 12, 416. [Google Scholar] [CrossRef]
- Su, P.; Lin, L.; Lv, Y.; Liang, J.; Sun, Y.; Zhang, W.; He, H.; Yan, B.; Ji, Z.; Wang, L.; et al. Potential and distribution of natural gas hydrate resources in the South China Sea. J. Mar. Sci. Eng. 2022, 10, 1364. [Google Scholar] [CrossRef]
- Wang, M.; Pang, S.; Jin, K.; Liang, X.; Wang, H.; Yi, H. Construction and experimental verification research of a magnetic detection system for submarine pipelines based on a two-part towed platform. J. Ocean. Eng. Sci. 2023, 8, 169–180. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, X.; Shen, Z. YOLO-Submarine Cable: An improved YOLO-V3 network for object detection on submarine cable images. J. Mar. Sci. Eng. 2022, 10, 1143. [Google Scholar] [CrossRef]
- Pham, D.A.; Han, S.H. Design of combined neural network and fuzzy logic controller for marine rescue drone trajectory-tracking. J. Mar. Sci. Eng. 2022, 10, 1716. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2013, 39, 131–149. [Google Scholar] [CrossRef]
- Zhang, G.; Yi, G.; Xie, Y.; Wang, S.; Wei, Z. Calibration method of DVL based on position observation information. Measurement 2024, 226, 113819. [Google Scholar] [CrossRef]
- Zhang, T.; Shi, H.; Chen, L.; Li, Y.; Tong, J. AUV positioning method based on tightly coupled SINS/LBL for underwater acoustic multipath propagation. Sensors 2016, 16, 357. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Qin, H.D.; Zhu, Z.B. Underwater Localization of AUVs in Motion Using Two-way Travel Time Measurements With Unknown Sound Velocity. IEEE Trans. Veh. Technol. 2023, 72, 11358–11373. [Google Scholar] [CrossRef]
- Cao, J.; Zheng, C.; Sun, D.; Zhang, D. Travel time processing for LBL positioning system. In Proceedings of the 2016 IEEE/OES China Ocean Acoustics (COA), Harbin, China, 9–11 January 2016; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Wang, C.; Du, P.; Wang, Z.; Wang, Z. An Underwater Acoustic Network Positioning Method Based on Spatial-Temporal Self-Calibration. Sensors 2022, 22, 5571. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Guo, J.; Hou, H. Calibration Algorithm of Underwater Navigation System Based on Multi-orthogonal Signals. In Proceedings of the 2018 International Conference on Image and Graphics Processing, Hong Kong, China, 24–26 February 2018; pp. 176–179. [Google Scholar]
- Zhang, L.; Zhang, T. A robust calibration method for the underwater transponder position based on Gauss-Newton iteration algorithm. In Proceedings of the 2019 7th International Conference on Control, Mechatronics and Automation (ICCMA), Delft, The Netherlands, 6–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 448–453. [Google Scholar]
- Zhang, T.; Zhang, L.; Shin, H.S. A novel and robust calibration method for the underwater transponder position. IEEE Trans. Instrum. Meas. 2020, 70, 9500512. [Google Scholar] [CrossRef]
- Tomczak, A.; Stępień, G.; Abramowski, T.; Bejger, A. Subsea wellhead spud-in marking and as-built position estimation method based on ultra-short baseline acoustic positioning. Measurement 2022, 195, 111155. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Yang, D.; Xu, X. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles. IEEE Trans. Veh. Technol. 2020, 69, 3740–3747. [Google Scholar] [CrossRef]
- Da-xiong, J.; Yi-ping, L.; Liu, J. Seafloor transponder calibration using improved perpendiculars intersection. Appl. Ocean. Res. 2010, 32, 261–266. [Google Scholar]
- Zhang, J.; Han, Y.; Zheng, C.; Sun, D. Underwater target localization using long baseline positioning system. Appl. Acoust. 2016, 111, 129–134. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, X. A Local Area Segmentation Algorithm for the Underwater Transponder Calibration. In Proceedings of the 2022 7th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 18–20 November 2022; IEEE: Piscataway, NJ, USA, 2019; pp. 345–349. [Google Scholar]
- Zhang, H.; Xu, X.; Zhang, T.; Wang, D.; Zhou, S.; Zhong, M. Improved Salp Swarm Algorithm for the Calibration of the Underwater Transponder. IEEE Trans. Instrum. Meas. 2023, 72, 8503310. [Google Scholar] [CrossRef]
- Yan, Z.; Deng, C.; Li, B.; Zhou, J. Novel particle swarm optimization and its application in calibrating the underwater transponder coordinates. Math. Probl. Eng. 2014, 2014, 672412. [Google Scholar] [CrossRef]
- Li, D.; Ji, D.; Lin, Y.; Liu, J. Mechanism analysis on large calibration errors of seabottom beacon how to improve navigation peformace. In Proceedings of the 2016 Sixth International Conference on Information Science and Technology (ICIST), Dalian, China, 6–8 May 2016; IEEE: Piscataway, NJ, USA, 2019; pp. 157–162. [Google Scholar]
- Wang, Y.; Xu, C.; Xu, H.; Zhao, H.; Liu, J. An integrated navigation algorithm for AUV based on pseudo-range measurements and error estimation. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; IEEE: Piscataway, NJ, USA, 2019; pp. 1625–1630. [Google Scholar]
- Real, M.; Vial, P.; Palomeras, N.; Carreras, M. Underwater Acoustic Localization using pose-graph SLAM. In Proceedings of the OCEANS 2023-Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Zhang, T.; Wang, Z.; Li, Y.; Tong, J. A passive acoustic positioning algorithm based on virtual long baseline matrix window. J. Navig. 2019, 72, 193–206. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Beacon 1 | Beacon 2 | Beacon 3 |
|---|---|---|---|
| Release point | (0.00, 0.00, 0.00) | (3239.81, 868.11, 0.00) | (868.11, 3239.81, 0.00) |
| Anchored point | (79.36, −91.52, −1018.97) | (3223.05, 867.79, −1000.26) | (817.26, 3156.09, −1008.66) |
| Algorithm | (m) | (m) | (m) | (m) | (m) | (m) |
|---|---|---|---|---|---|---|
| Setpoint | 79.36/0.00 | −91.52/0.00 | 3223.05/0.00 | 867.79/−0.00 | 817.22/0.00 | 3156.09/0.00 |
| LS | 80.01/0.66 | −91.43/0.09 | 3216.65/−6.40 | 867.77/−0.02 | 820.15/2.93 | 3156.98/0.89 |
| PSO | 76.52/−2.84 | −89.32/2.20 | 3223.49/0.45 | 870.29/2.50 | 813.60/−3.61 | 3156.09/0.01 |
| EVPSO | 79.66/0.30 | −92.22/−0.71 | 3223.42/0.38 | 866.94/−0.86 | 816.88/−0.34 | 3156.29/0.20 |
| Algorithm | (m) | (m) |
|---|---|---|
| Uncalibrated | 17.81 | 67.83 |
| LS | 5.71 | 2.61 |
| PSO | 1.65 | 1.46 |
| EVPSO | 1.14 | 1.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Yi, G.; Wei, Z.; Xie, Y.; Qi, Z. A Novel Positional Calibration Method for an Underwater Acoustic Beacon Array Based on the Equivalent Virtual Long Baseline Positioning Model. J. Mar. Sci. Eng. 2024, 12, 825. https://doi.org/10.3390/jmse12050825
Zhang G, Yi G, Wei Z, Xie Y, Qi Z. A Novel Positional Calibration Method for an Underwater Acoustic Beacon Array Based on the Equivalent Virtual Long Baseline Positioning Model. Journal of Marine Science and Engineering. 2024; 12(5):825. https://doi.org/10.3390/jmse12050825
Chicago/Turabian StyleZhang, Ge, Guoxing Yi, Zhennan Wei, Yangguang Xie, and Ziyang Qi. 2024. "A Novel Positional Calibration Method for an Underwater Acoustic Beacon Array Based on the Equivalent Virtual Long Baseline Positioning Model" Journal of Marine Science and Engineering 12, no. 5: 825. https://doi.org/10.3390/jmse12050825
APA StyleZhang, G., Yi, G., Wei, Z., Xie, Y., & Qi, Z. (2024). A Novel Positional Calibration Method for an Underwater Acoustic Beacon Array Based on the Equivalent Virtual Long Baseline Positioning Model. Journal of Marine Science and Engineering, 12(5), 825. https://doi.org/10.3390/jmse12050825