
Performance Assessment of NAMI DANCE in Tsunami Evolution and Currents Using a Benchmark Problem


Abstract
:
1. Introduction
2. Materials and Methods
2.1. The Numerical Model: NAMI DANCE
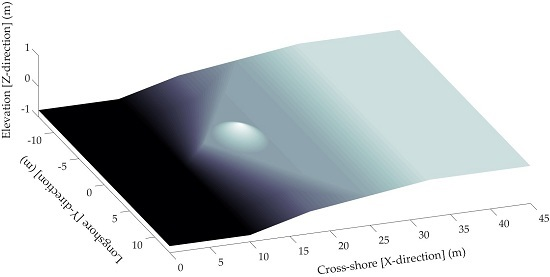
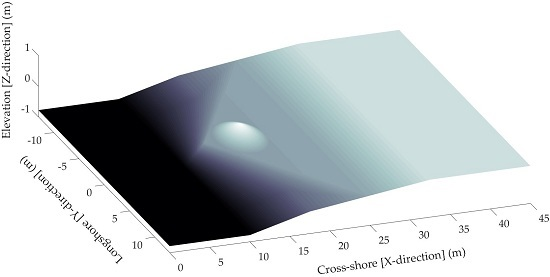
2.2. The Benchmark Problem
3. Results
3.1. Free Surface Elevation Time Series
3.2. Velocity Time Series
3.3. Performance Assessment of the Model
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Lynett, P.J.; Borrero, J.C.; Weiss, R.; Son, S.; Greer, D.; Renteria, W. Observations and modeling of tsunami-induced currents in ports and harbors. EPSL 2012, 327, 68–74. [Google Scholar]
- Madsen, P.A.; Fuhrman, D.R.; Schaffer, H.A. On the solitary wave paradigm for tsunamis. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- NTHMP Mapping & Modeling Benchmarking Workshop: Tsunami Currents. Benchmark #5. Available online: http://coastal.usc.edu/currents_workshop/problems/prob5.html (accessed on 2 August 2016).
- Onat, Y.; Yalciner, A.C. Initial stage of database development for tsunami warning system along Turkish coasts. Ocean Eng. 2013, 74, 141–154. [Google Scholar] [CrossRef]
- Kian, R.; Yalciner, A.C.; Aytore, B.; Zaytsev, A. Wave Amplification and Resonance in Enclosed Basins; A Case Study in Haydarpasa Port of Istanbul. In Proceedings of the 2015 IEEE/OES Eleventh Current, Waves and Turbulence Measurement, St. Petersburg, VA, USA, 2–6 March 2015; Volume 11, pp. 1–7.
- Patel, V.M.; Dholakia, M.B.; Singh, A.P. Emergency preparedness in the case of Makran tsunami: A case study on tsunami risk visualization for the western parts of Gujarat, India. Geomat. Nat. Hazards Risk 2016, 7, 826–842. [Google Scholar] [CrossRef]
- Yalciner, A.C.; Pelinovsky, E.; Zaytsev, A.; Kurkin, A.; Ozer, C.; Karakus, H.; Ozyurt, G. Modeling and visualization of tsunamis: Mediterranean examples. In Tsunami and Nonlinear Waves, 1st ed.; Kundu, A., Ed.; Springer: Berlin, Germany, 2007; pp. 273–283. [Google Scholar]
- Synolakis, C.E.; Bernard, E.N.; Titov, V.; Kanoglu, U.; Gonzalez, F. Validation and verification of tsunami numerical models. PAGEOPH 2008, 165, 2197–2228. [Google Scholar] [CrossRef]
- Yalciner, A.C.; Zaytsev, A.; Kanoglu, U.; Velioglu, D.; Dogan, G.G.; Kian, R.; Sharghivand, N.; Aytore, B. NTHMP Mapping and Modeling Benchmarking Workshop: Tsunami Currents. Available online: http://coastal.usc.edu/currents_workshop/presentations/Yalciner.pdf (accessed on 2 August 2016).
- Ozer, C.; Yalciner, A.C. Sensitivity study of hydrodynamic parameters during numerical simulations of tsunami inundation. PAGEOPH 2011, 168, 2083–2095. [Google Scholar]
- Sozdinler, C.O.; Yalciner, A.C.; Zaytsev, A. Investigation of tsunami hydrodynamic parameters in inundation zones with different structural layouts. PAGEOPH 2014, 172, 931–952. [Google Scholar] [CrossRef]
- Sozdinler, C.O.; Yalciner, A.C.; Zaytsev, A.; Suppasri, A.; Imamura, F. Investigation of hydrodynamic parameters and the effects of breakwaters during the 2011 Great East Japan Tsunami in Kamaishi Bay. PAGEOPH 2015, 172, 3473–3491. [Google Scholar] [CrossRef]
- Velioglu, D.; Kian, R.; Yalciner, A.C.; Zaytsev, A. Validation and Performance Comparison of Numerical Codes for Tsunami Inundation. In Proceedings of the 2015 American Geophysical Union Fall Meeting, San Francisco, CA, USA, 14–18 December 2015.
- Velioglu, D.; Kian, R.; Yalciner, A.C.; Zaytsev, A. Validation and Comparison of 2D and 3D Codes for Nearshore Motion of Long Waves Using Benchmark Problems. In Proceedings of the 2016 European Geosciences Union, Vienna, Austria, 17–22 April 2016.
- Dilmen, D.I.; Kemec, S.; Yalciner, A.C.; Düzgün, S.; Zaytsev, A. Development of a tsunami inundation map in detecting tsunami risk in Gulf of Fethiye, Turkey. PAGEOPH 2015, 172. [Google Scholar] [CrossRef]
- Heidarzadeh, M.; Krastel, S.; Yalciner, A.C. The state-of-the-art numerical tools for modeling landslide tsunamis: A short review. In Submarine Mass Movements and Their Consequences, 6th ed.; Sebastian, K., Jan-Hinrich, B., David, V., Michael, S., Christian, B., Roger, U., Jason, C., Katrin, H., Michael, S., Carl, B.H., Eds.; Springer: Bern, Switzerland, 2013; Volume 37, pp. 483–495. [Google Scholar]
- Yalciner, A.C.; Gülkan, P.; Dilmen, D. I.; Aytore, B.; Ayca, A.; Insel, I.; Zaytsev, A. Evaluation of tsunami scenarios for western Peloponnese, Greece. Boll. Geofis. Teor. Appl. 2014, 55, 485–500. [Google Scholar]
- Zahibo, N.; Pelinovsky, E.; Kurkin, A.; Kozelkov, A. Estimation of far-field tsunami potential for the Caribbean Coast based on numerical simulation. Sci. Tsunami Hazards 2003, 21, 202–222. [Google Scholar]
- Swigler, D.T. Laboratory Study Investigating the Three-dimensıonal Turbulence and Kinematic Properties Associated with a Breaking Solitary Wave. Master’s Thesis, Texas A&M University, College Station, TX, USA, August 2009. [Google Scholar]
- National Tsunami Hazard Mitigation Program. Proceedings and Results of the 2011 NTHMP Model Benchmarking Workshop. Available online: http://nws.weather.gov/nthmp/documents/nthmpWorkshopProcMerged.pdf (accessed on 21 July 2016).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Free Surface Elevation (FSE) | % NRMSE | % MAX |
|---|---|---|
| Gage 1 | 0.60 | 0.02 |
| Gage 2 | 7.30 | 19.30 |
| Gage 3 | 15.00 | 17.60 |
| Gage 4 | 2.60 | 2.60 |
| Gage 5 | 7.20 | 18.80 |
| Gage 6 | 8.70 | 8.20 |
| Gage 7 | 4.50 | 7.30 |
| Gage 8 | 5.00 | 6.80 |
| Horizontal Velocity | % NRMSE | % MAX |
|---|---|---|
| Gage 2, U | 8.25 | 18.90 |
| Gage 2, V | 16.00 | 27.90 |
| Gage 9, U | 10.75 | 15.00 |
| Gage 9, V | 16.00 | 28.60 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Velioglu, D.; Kian, R.; Yalciner, A.C.; Zaytsev, A. Performance Assessment of NAMI DANCE in Tsunami Evolution and Currents Using a Benchmark Problem. J. Mar. Sci. Eng. 2016, 4, 49. https://doi.org/10.3390/jmse4030049
Velioglu D, Kian R, Yalciner AC, Zaytsev A. Performance Assessment of NAMI DANCE in Tsunami Evolution and Currents Using a Benchmark Problem. Journal of Marine Science and Engineering. 2016; 4(3):49. https://doi.org/10.3390/jmse4030049
Chicago/Turabian StyleVelioglu, Deniz, Rozita Kian, Ahmet Cevdet Yalciner, and Andrey Zaytsev. 2016. "Performance Assessment of NAMI DANCE in Tsunami Evolution and Currents Using a Benchmark Problem" Journal of Marine Science and Engineering 4, no. 3: 49. https://doi.org/10.3390/jmse4030049