Modelling the Wave Overtopping Flow over the Crest and the Landward Slope of Grass-Covered Flood Defences


Abstract
:1. Introduction
2. Measured Overtopping Variables
2.1. Data of the Field Tests
2.1.1. Vechtdijk
2.1.2. Millingen a/d Rijn
2.2. Model Input Variables
3. Model Setup
3.1. Model Specifications
3.1.1. Boundary Conditions
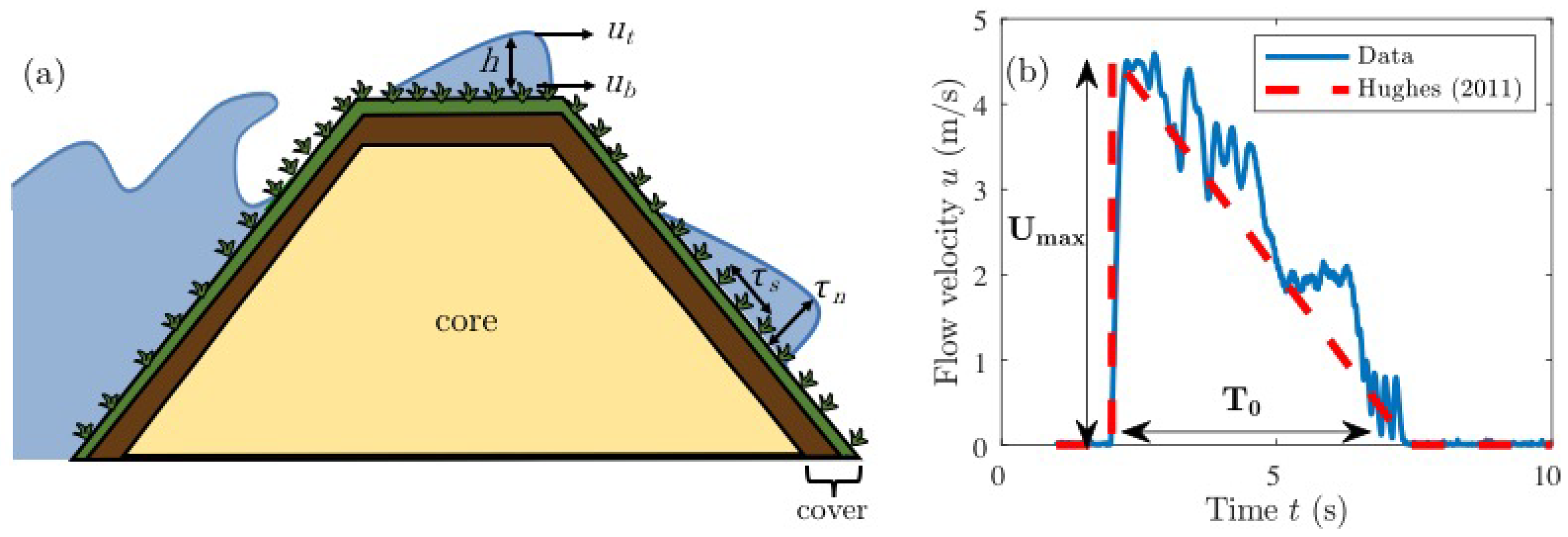
3.1.2. Model Output Variables
3.2. Calibration of the Roughness Height
3.3. Model Validation
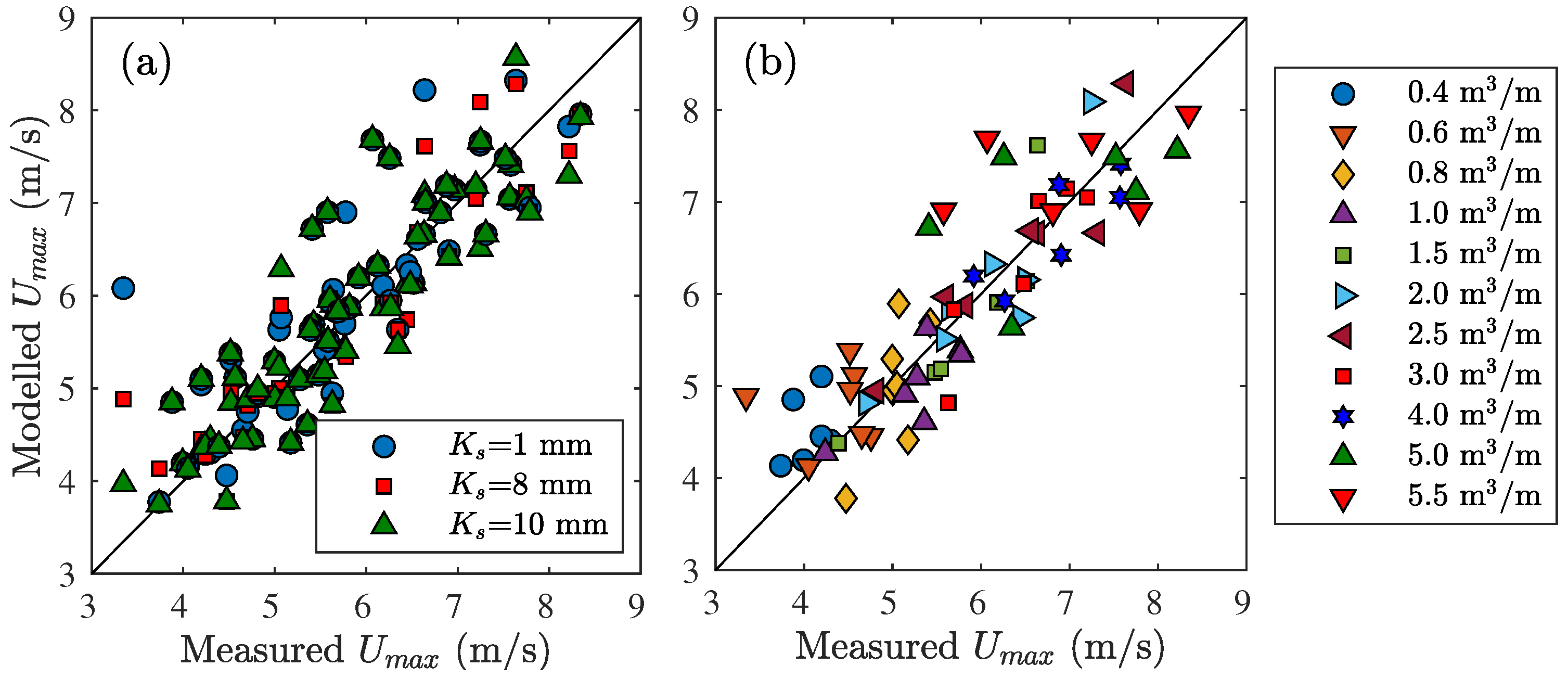
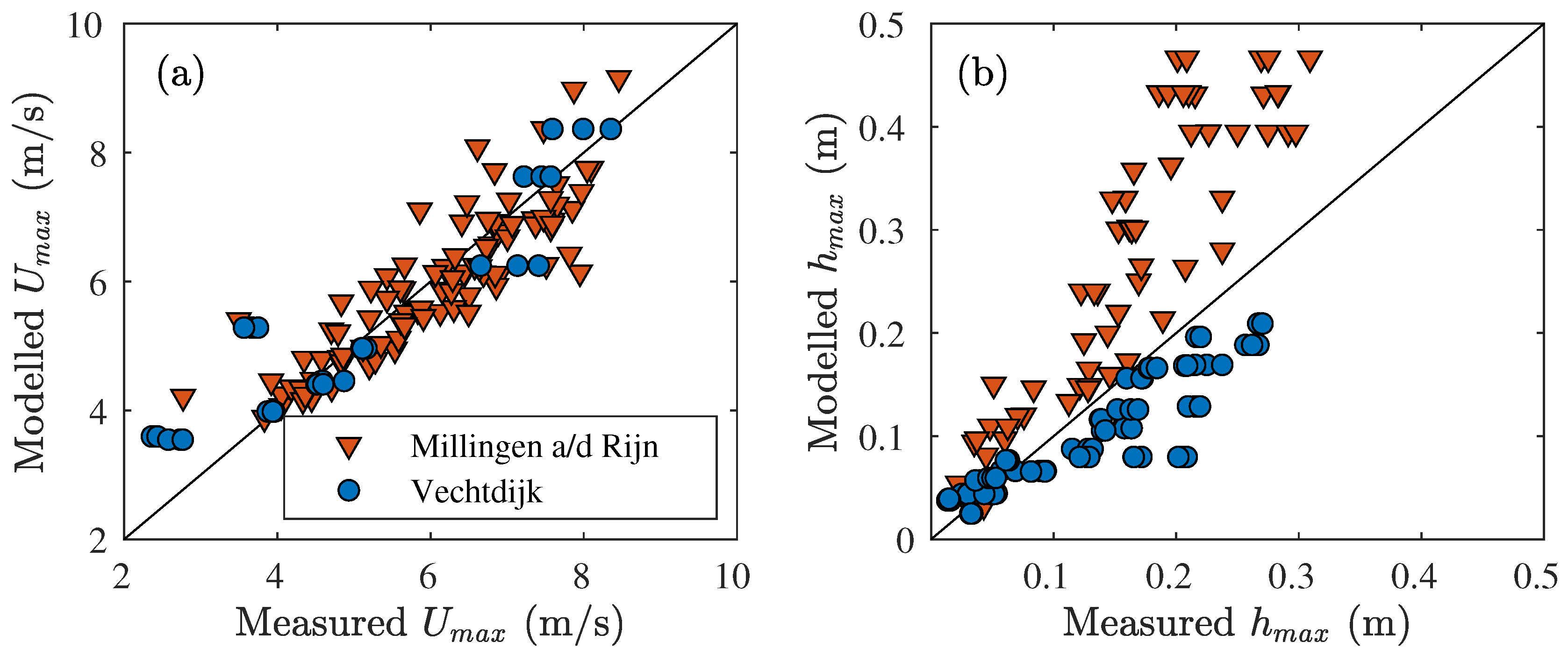
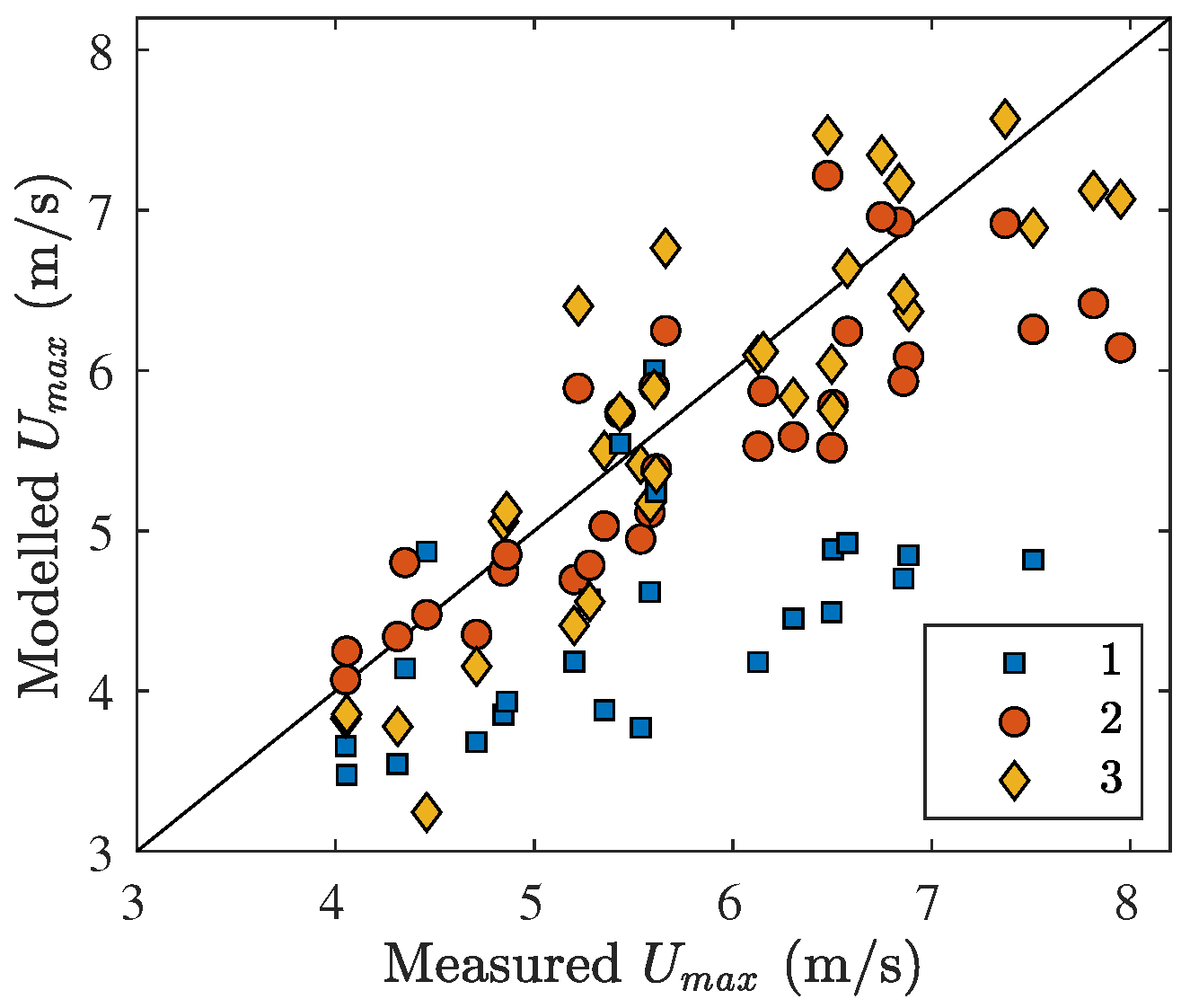
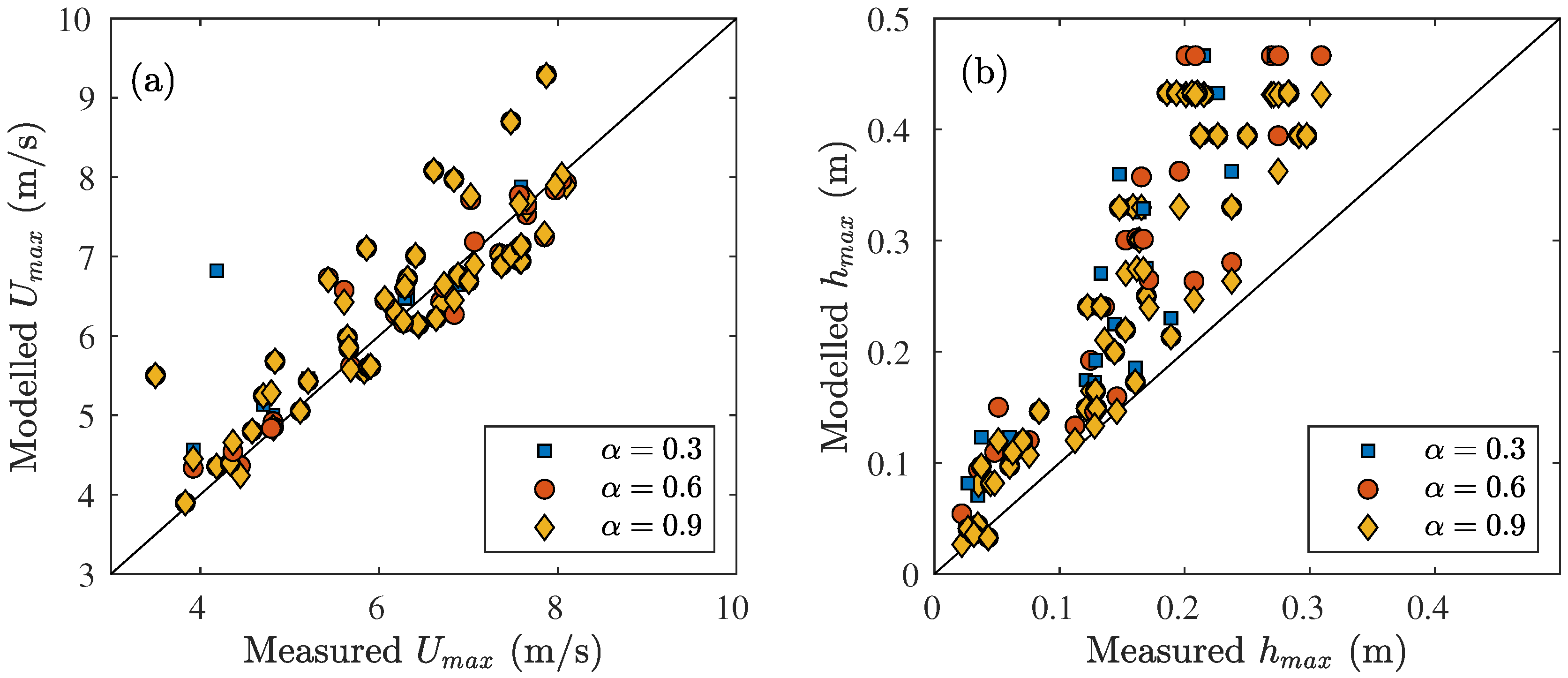
3.3.1. Maximum Flow Velocity and Layer Thickness
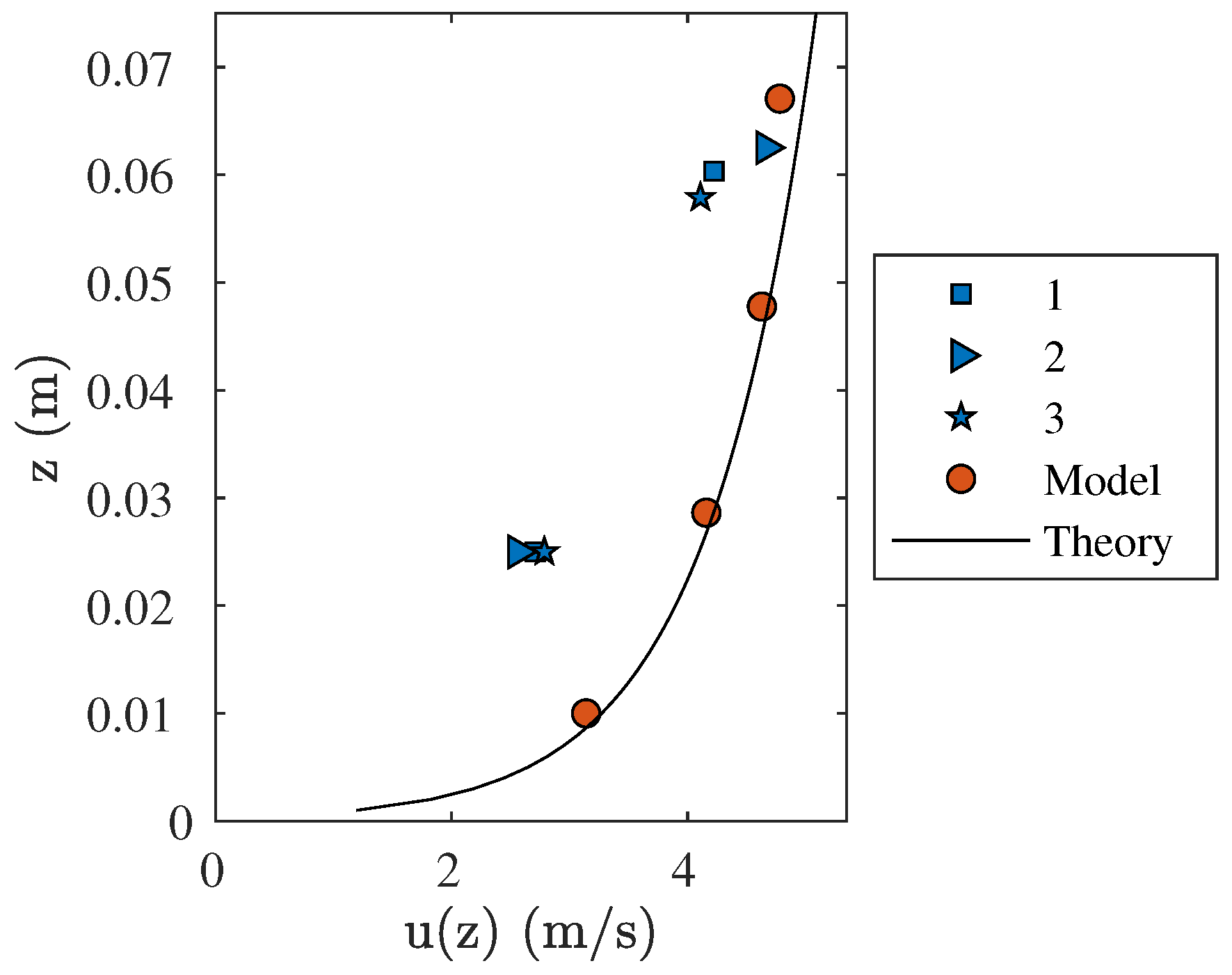
3.3.2. Vertical Flow Structure
3.3.3. Pressure
4. Results
4.1. Calibration of the Roughness Height
4.2. Validation of the Numerical Model
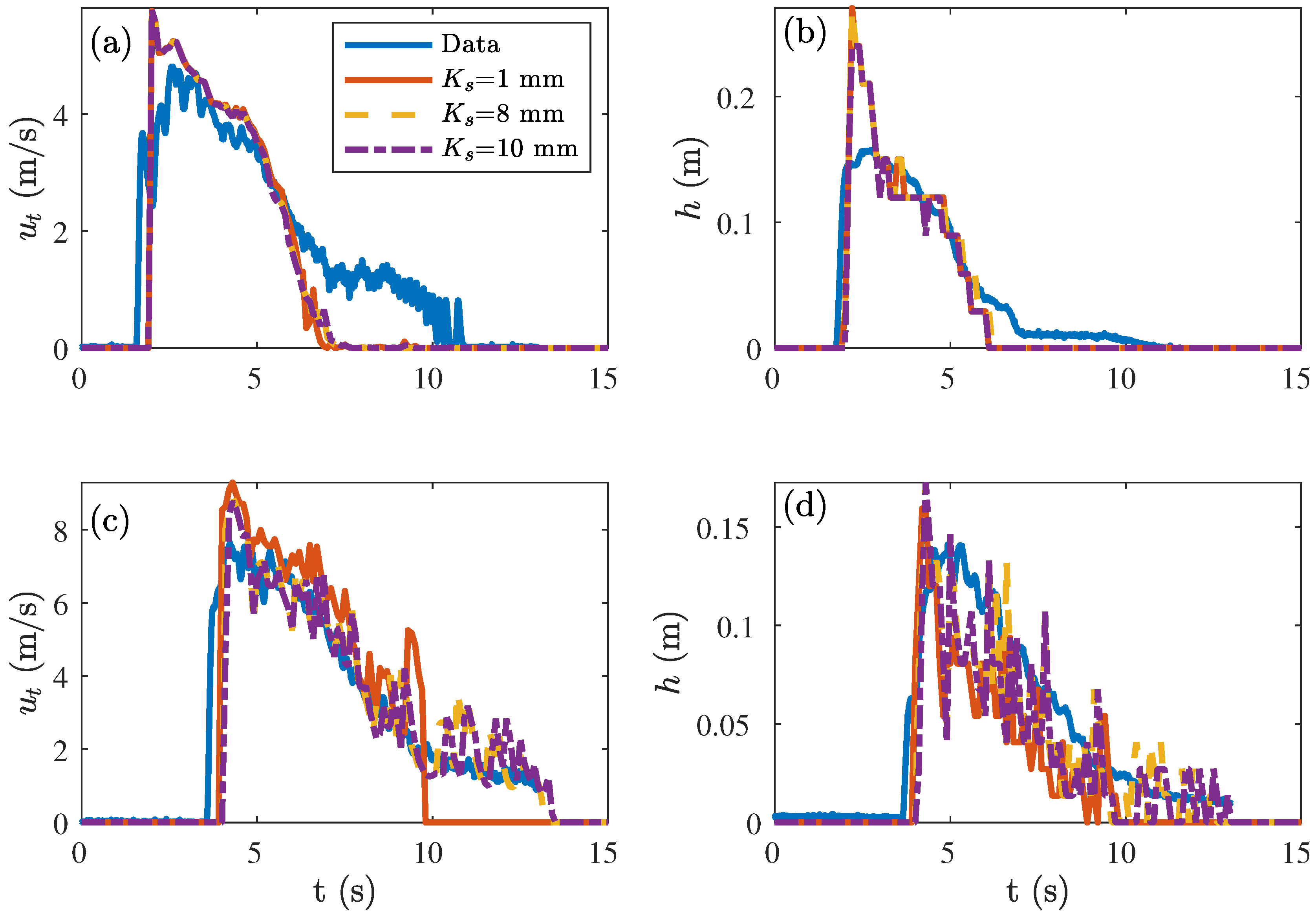
4.2.1. Flow Velocity and Layer Thickness
4.2.2. Vertical Flow Structure
4.2.3. Pressure
4.3. Model Output Potential for Hydraulic Forces during Overtopping
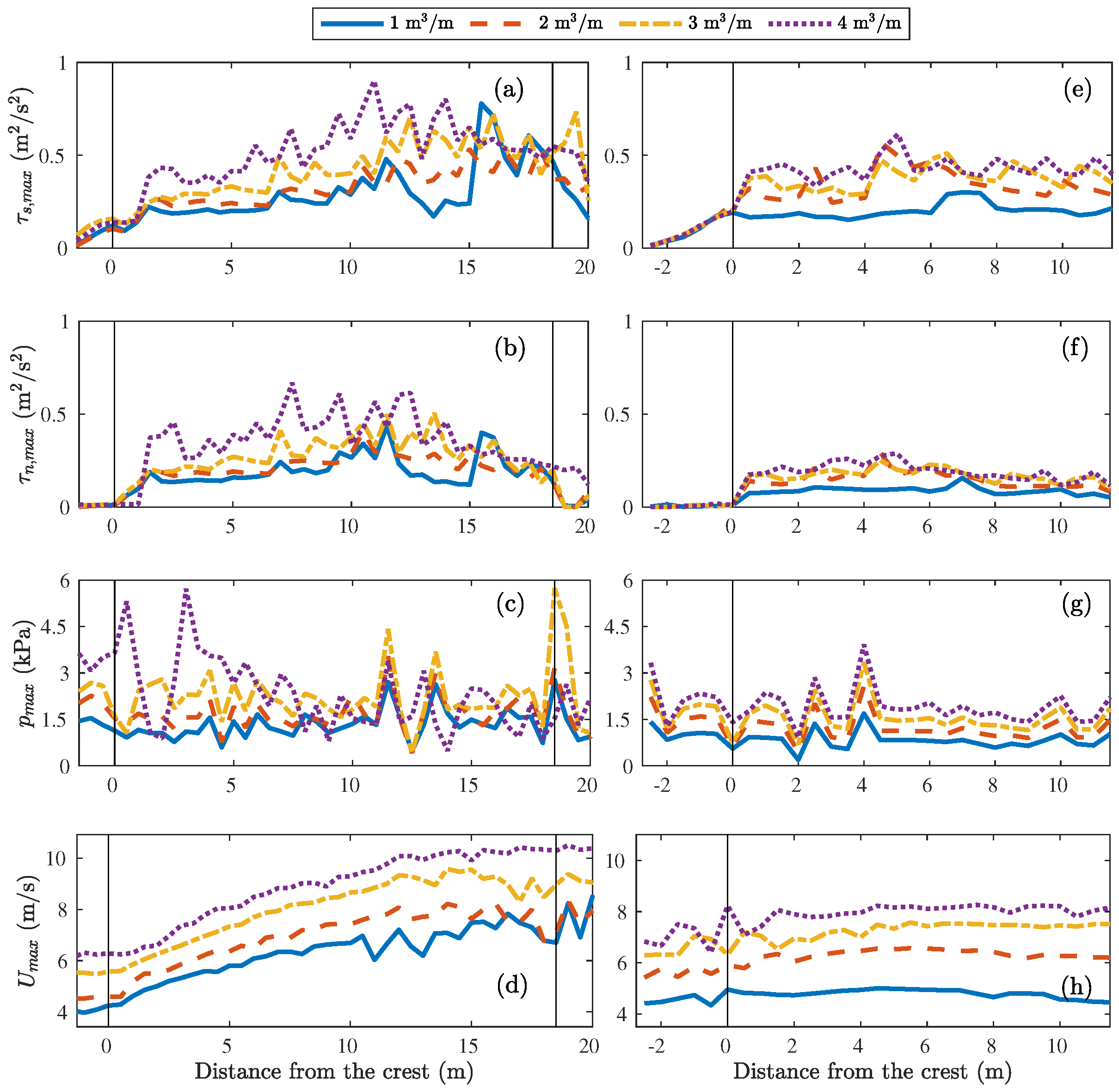
4.3.1. Flow Velocity
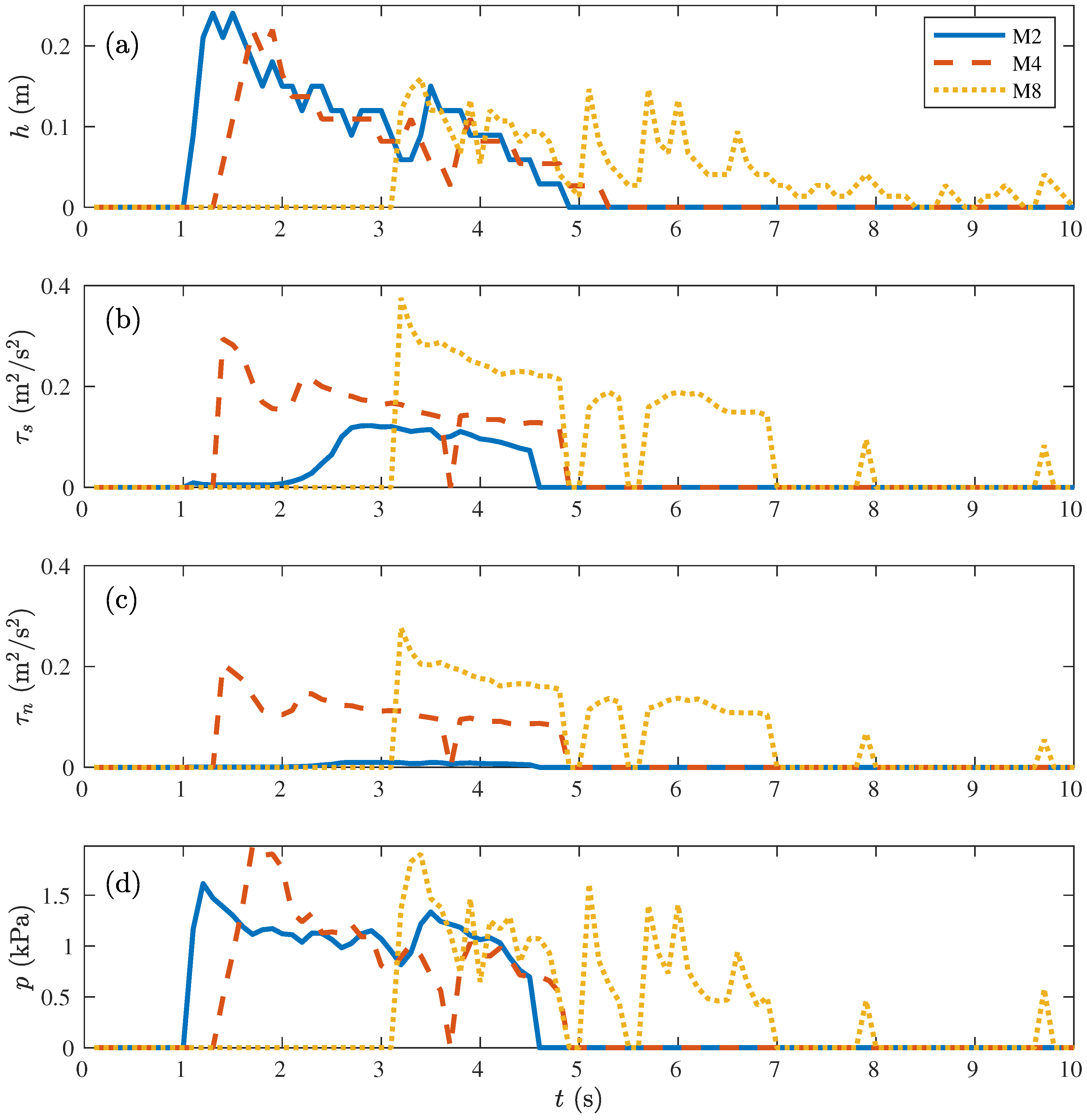
4.3.2. Shear and Normal Stress
4.3.3. Pressure on the Bed
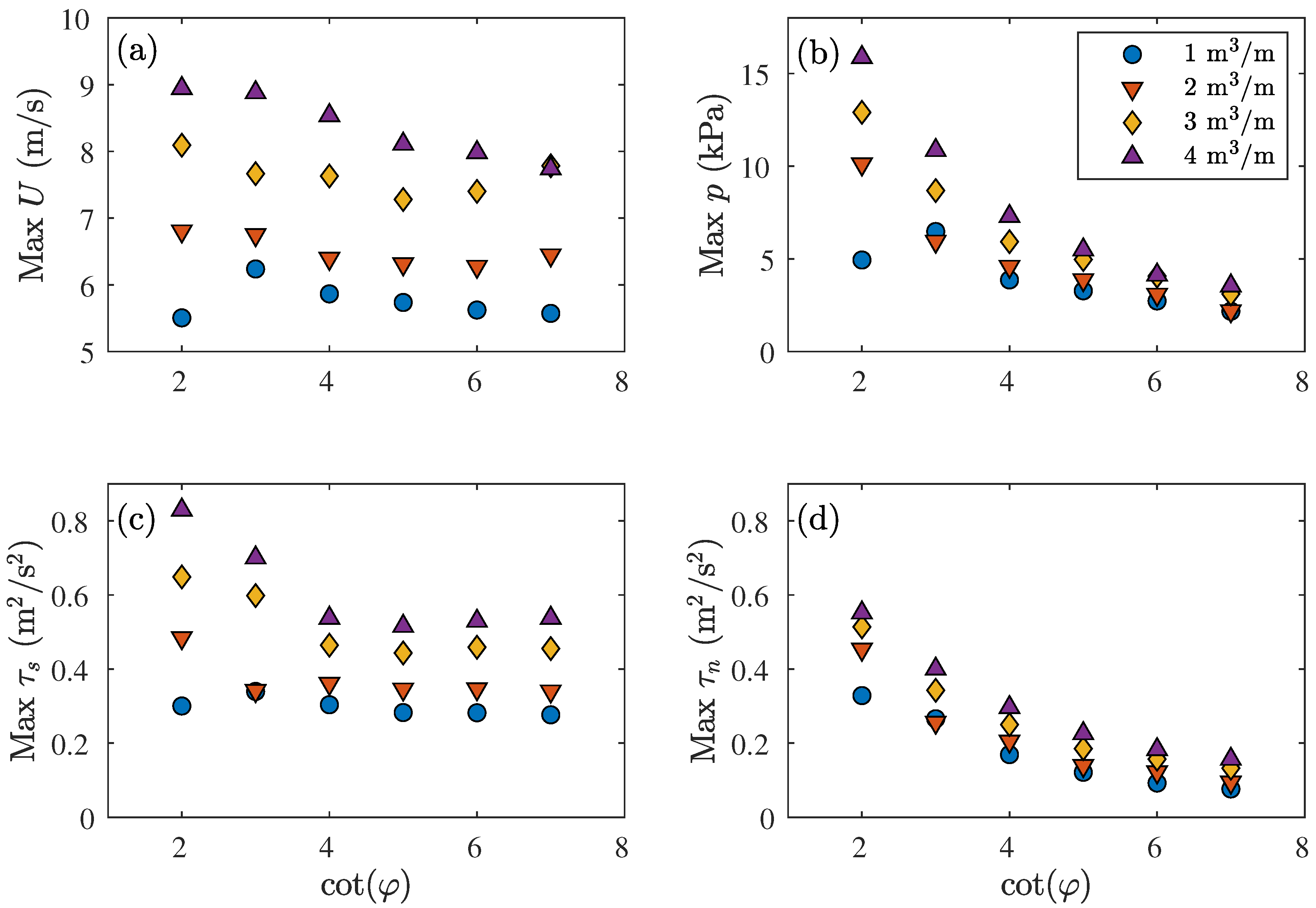
4.4. The Effect of the Slope Steepness
5. Discussion
5.1. Model Application and Limitation
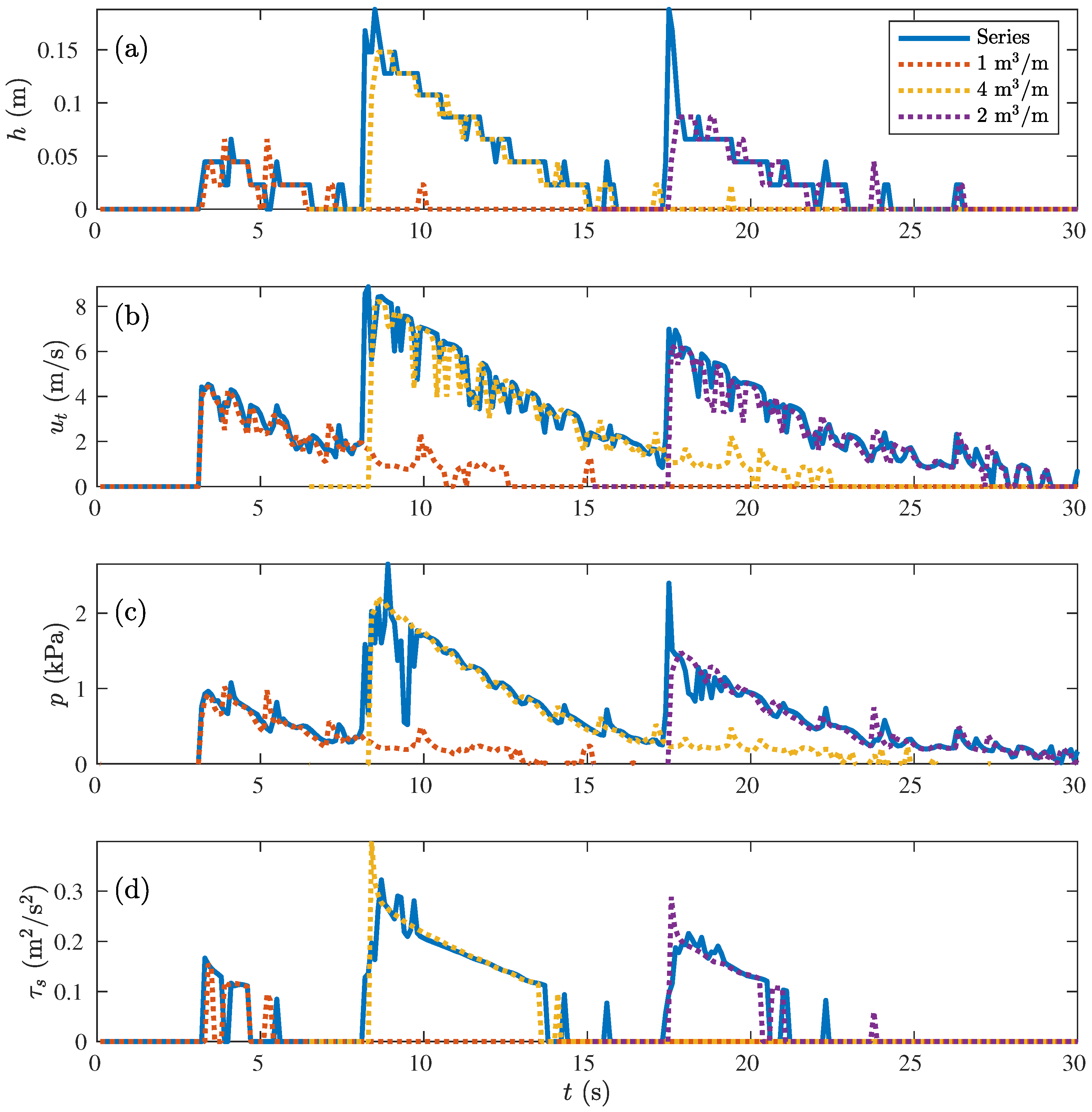
Individual Overtopping Volumes
5.2. Roughness Height
5.3. Comparison with Existing Modelling Approaches
5.4. Sensitivity of the Model Settings
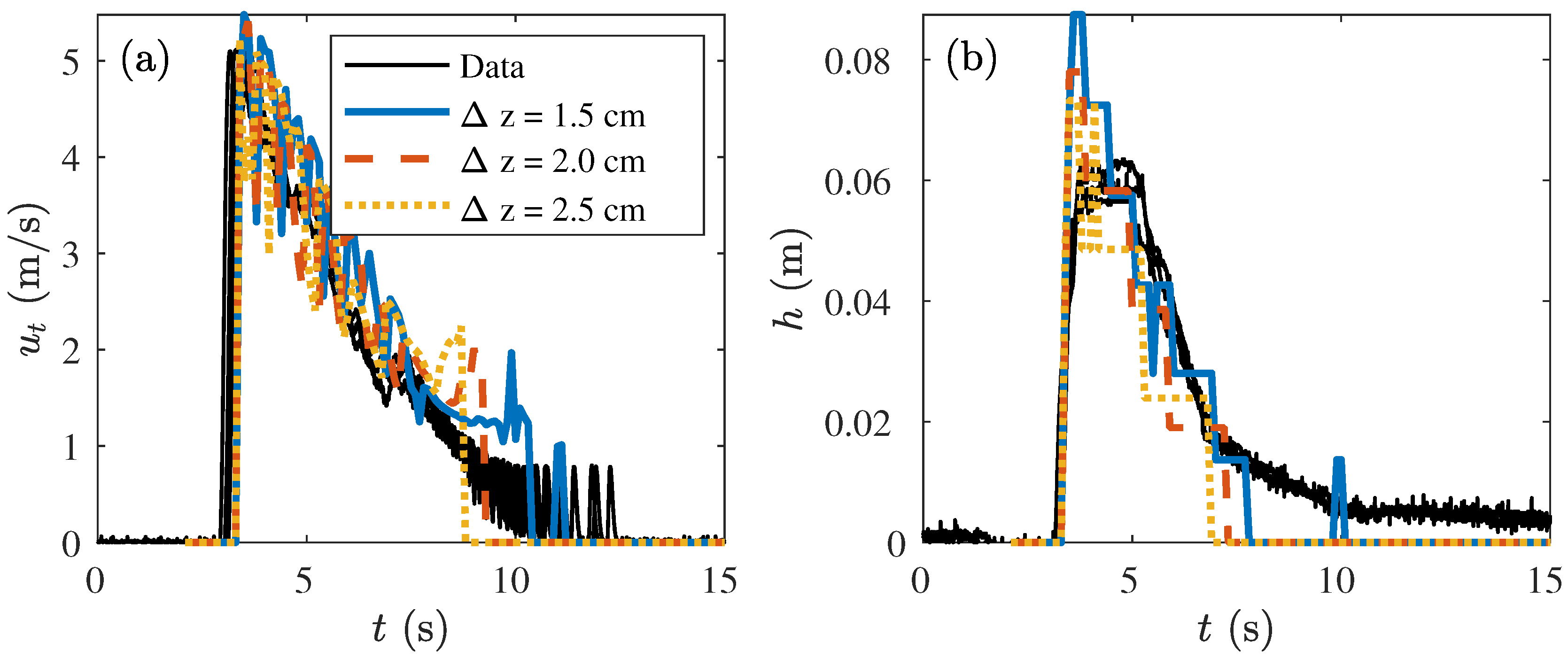
5.4.1. The Layer Thickness
5.4.2. The Near Bed Velocity
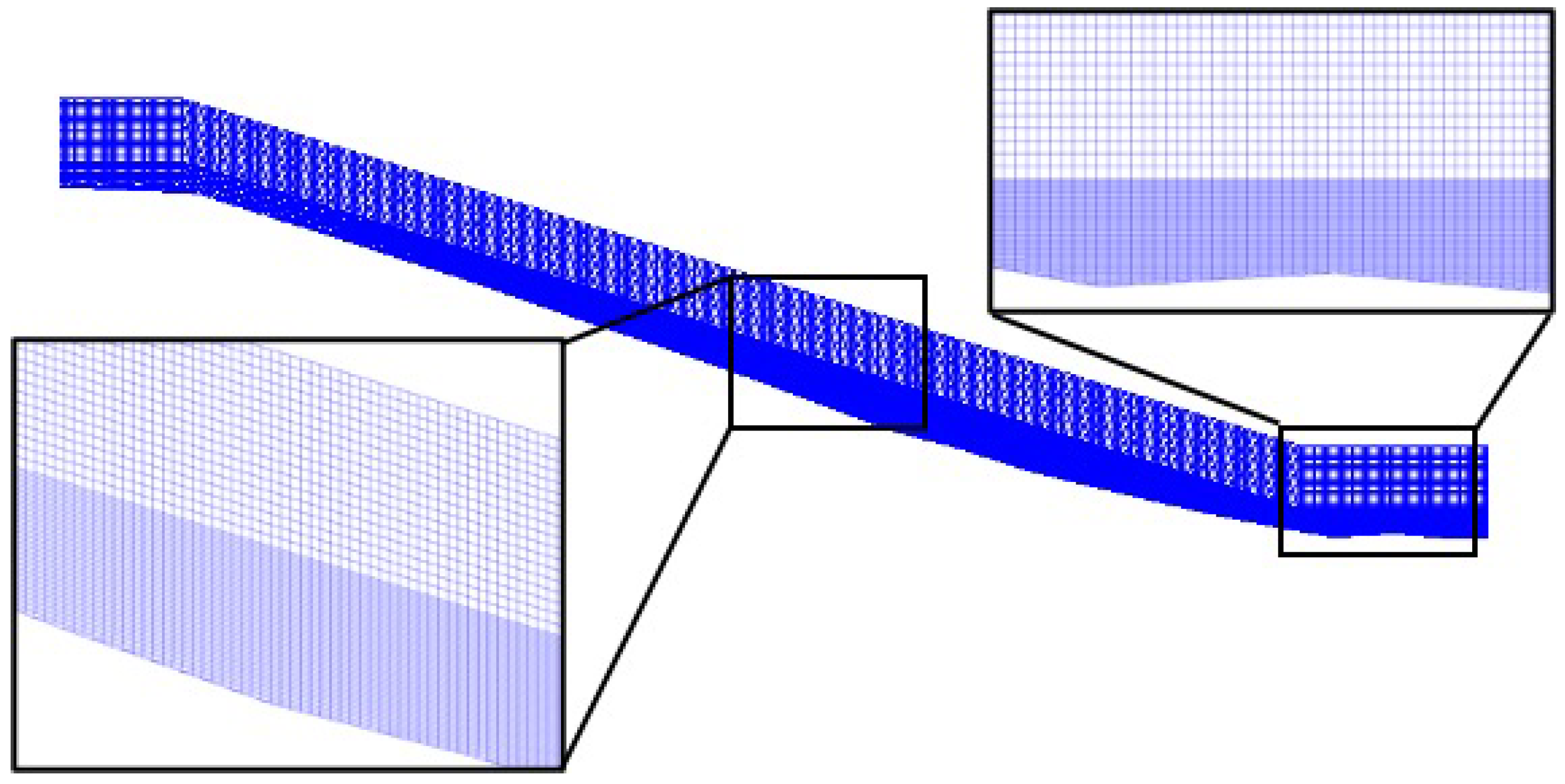
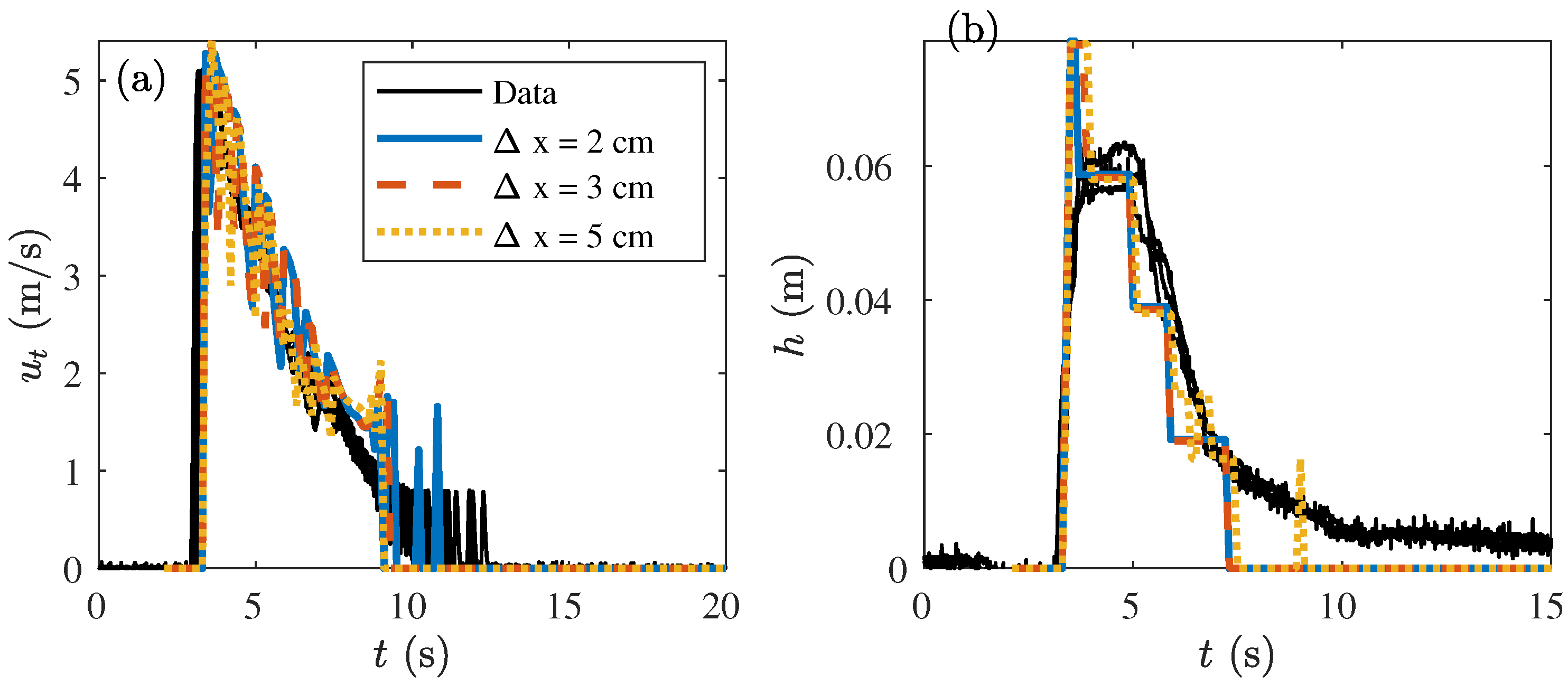
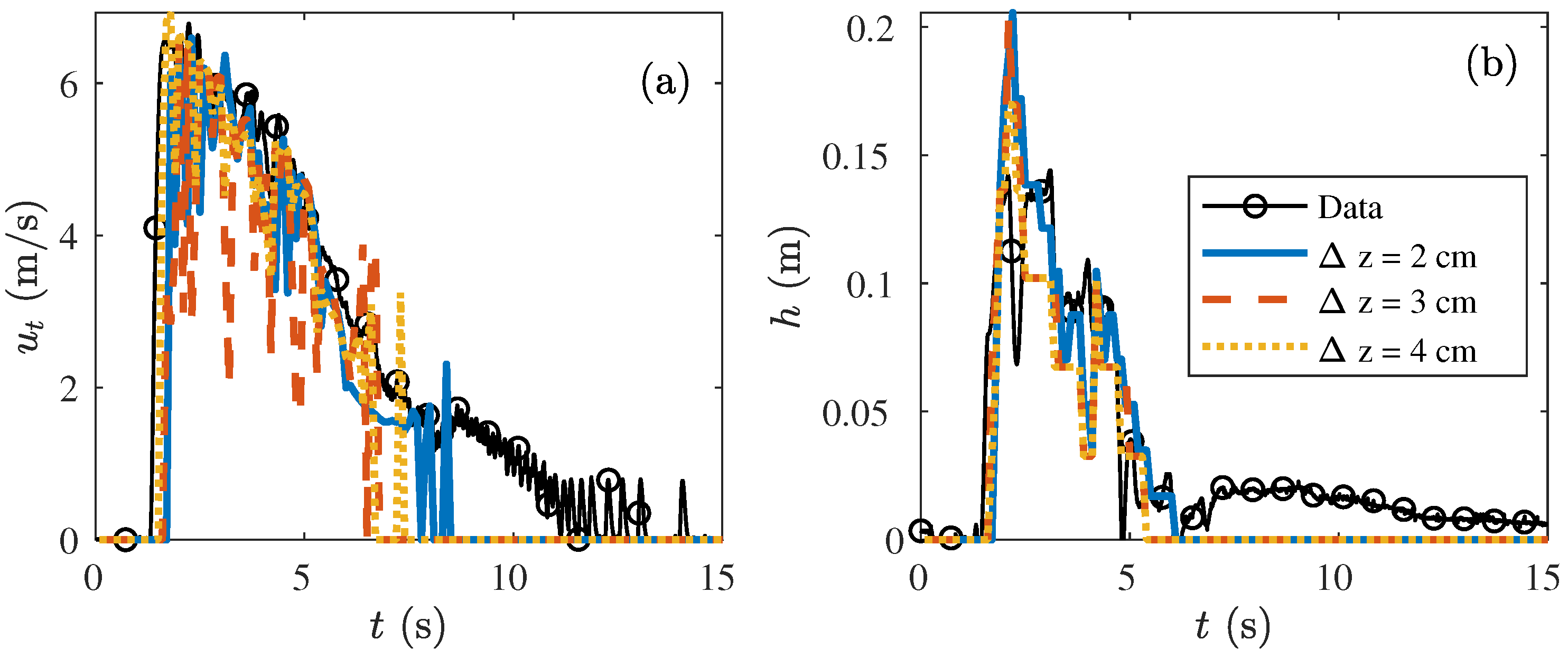
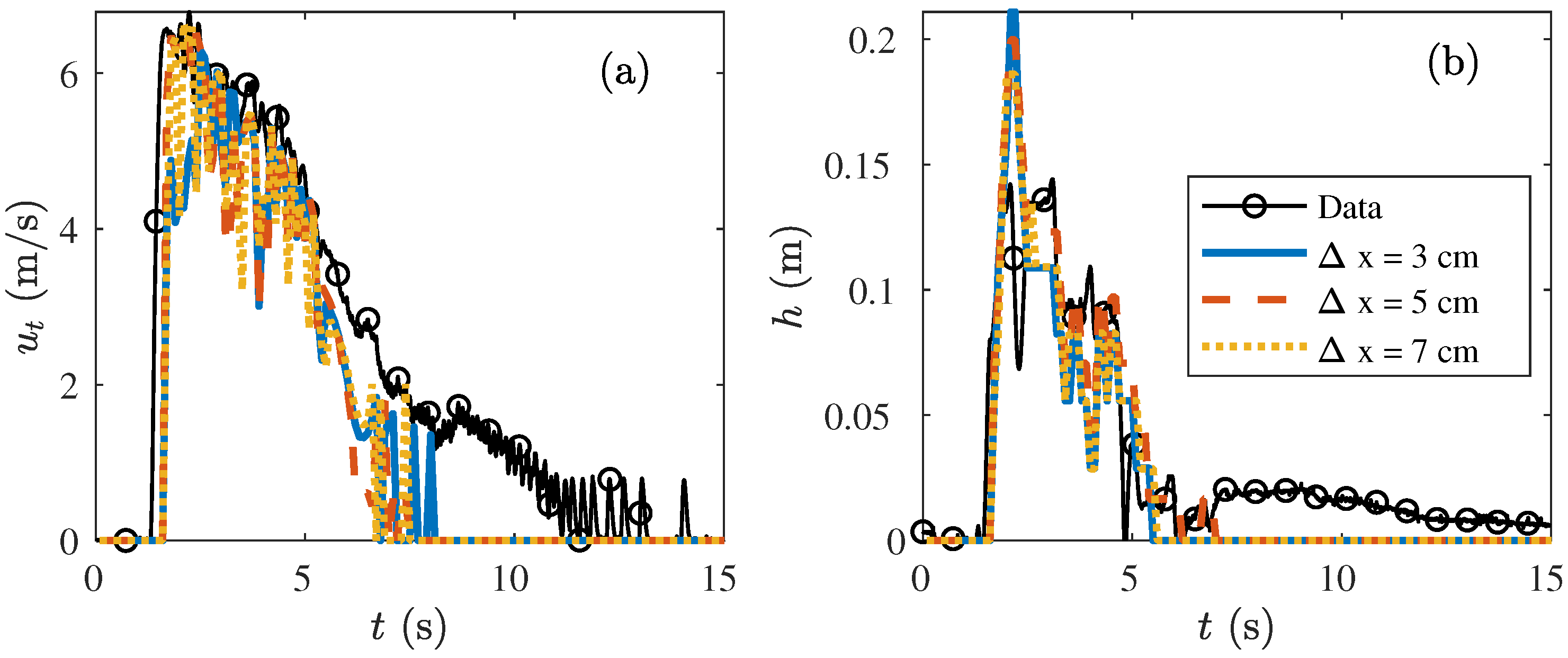
5.4.3. The Effect of the Grid Size
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. The Effect on Slope Steepness on the Hydraulic Load

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Increase from m/m to m/m | Increase from to | |
|---|---|---|
| Flow Velocity | 42% | 13% |
| Pressure | 84% | 168% |
| Shear Stress | 106% | 21% |
| Normal Stress | 53% | 225% |
Appendix B. Figures to Support the Sensitivity Analysis





References
- Van der Meer, J.W.; Allsop, N.W.H.; Bruce, T.; De Rouck, J.; Kortenhaus, A.; Pullen, T.; Schüttrumpf, H.; Troch, P.; Zanuttigh, B. Manual on Wave Overtopping of Sea Defences and Related Structures. An oVertopping Manual Largely Based on European Research, But for wOrldwide Application; Technical Report; EurOtop: London, UK, 2018; Available online: www.overtopping-manual.com (accessed on 28 February 2019).
- Hoffmans, G.J.C.M. The Influence of Turbulence on Soil Erosion; Eburon Uitgeverij BV: Utrecht, The Netherlands, 2012. [Google Scholar]
- Hughes, S.A. Adaptation of the Levee Erosional Equivalence Method for the Hurricane Storm Damage Risk Reduction System (HSDRRS); Technical Report; U.S. Army Corps of Engineers: New Orleans, LA, USA, 2011. [Google Scholar]
- Van der Meer, J.W. Erosion Strength of Inner Slopes of Dikes Against Wave Overtopping. Preliminary Conclusions after Two Years of Testing with the Wave Overtopping Simulator; Summary Report; Van der Meer Consulting: Akkrum, The Netherlands, 2008. [Google Scholar]
- Aguilar-López, J.P.; Warmink, J.J.; Bomers, A.; Schielen, R.M.J.; Hulscher, S.J. Failure of grass covered flood defences with roads on top due to wave overtopping: A probabilistic assessment method. J. Mar. Sci. Eng. 2018, 6, 74. [Google Scholar] [CrossRef] [Green Version]
- Bomers, A.; Aguilar-López, J.P.; Warmink, J.J.; Hulscher, S.J. Modelling effects of an asphalt road at a dike crest on dike cover erosion onset during wave overtopping. Nat. Hazards 2018, 93, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Van der Meer, J.W.; Hardeman, B.; Steendam, G.J.; Schüttrumpf, H.; Verheij, H. Flow depths and velocities at crest and landward slope of a dike, in theory and with the wave overtopping simulator. Coast. Eng. Proc. 2010, 1, 10. [Google Scholar] [CrossRef] [Green Version]
- Van Gent, M.R.A. Low-Exceedance Wave Overtopping Events: Estimates of Wave Overtopping Parameters at the Crest and Landward Side of Dikes; Delft Cluster: Delft, The Netherlands, 2002. [Google Scholar] [CrossRef] [Green Version]
- Schüttrumpf, H.; Oumeraci, H. Layer thicknesses and velocities of wave overtopping flow at seadikes. Coast. Eng. 2005, 52, 473–495. [Google Scholar] [CrossRef]
- Hughes, S.A.; Thornton, C.I.; Van der Meer, J.W.; Scholl, B.N. Improvements in Describing Wave Overtopping Processes. Coast. Eng. Proc. 2012, 1, 35. [Google Scholar] [CrossRef]
- Van Damme, M. Distributions for wave overtopping parameters for stress strength analyses on flood embankments. Coast. Eng. 2016, 116, 195–206. [Google Scholar] [CrossRef] [Green Version]
- Van Bergeijk, V.M.; Warmink, J.J.; Van Gent, M.R.; Hulscher, S.J. An analytical model of wave overtopping flow velocities on dike crests and landward slopes. Coast. Eng. 2019, 149, 28–38. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Hofland, B.; Altomare, C.; Suzuki, T.; Uijttewaal, W. Forces on a vertical wall on a dike crest due to overtopping flow. Coast. Eng. 2015, 95, 94–104. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, G.; Hu, J.; Chen, X.; Yang, W.; Tao, A.; Zheng, J. Experimental study on mechanism of sea-dike failure due to wave overtopping. Appl. Ocean Res. 2017, 68, 171–181. [Google Scholar] [CrossRef]
- Ponsioen, L.; van Damme, M.; Hofland, B.; Peeters, P. Relating grass failure on the landside slope to wave overtopping induced excess normal stresses. Coast. Eng. 2019, 148, 49–56. [Google Scholar] [CrossRef]
- Lara, J.L.; Higuera, P.; Maza, M.M.; Del Jesus, M.; Losada, I.J.I.J.; Barajas, G. Forces induced on a vertical breakwater by incident oblique waves. Coast. Eng. Proc. 2012, 1, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Altomare, C.; Crespo, A.J.C.; Rogers, B.D.; Dominguez, J.M.; Gironella, X.; Gómez-Gesteira, M. Numerical modelling of armour block sea breakwater with smoothed particle hydrodynamics. Comput. Struct. 2014, 130, 34–45. [Google Scholar] [CrossRef]
- Palma, G.; Formentin, S.M.; Zanuttigh, B.; Contestabile, P.; Vicinanza, D. Numerical simulations of the hydraulic performance of a breakwater-integrated overtopping wave energy converter. J. Mar. Sci. Eng. 2019, 7, 38. [Google Scholar] [CrossRef] [Green Version]
- Altomare, C.; Crespo, A.J.C.; Dominguez, J.M.; Gómez-Gesteira, M.; Suzuki, T.; Verwaest, T. Applicability of Smoothed Particle Hydrodynamics for estimation of sea wave impact on coastal structures. Coast. Eng. 2015, 96, 1–12. [Google Scholar] [CrossRef]
- Castellino, M.; Sammarco, P.; Romano, A.; Martinelli, L.; Ruol, P.; Franco, L.; De Girolamo, P. Large impulsive forces on recurved parapets under non-breaking waves. A numerical study. Coast. Eng. 2018, 136, 1–15. [Google Scholar] [CrossRef]
- Suzuki, T.; Altomare, C.; Verwaest, T.; Trouw, K.; Zijlema, M. Two-dimensional wave overtopping calculation over a dike in shallow foreshore by SWASH. In Proceedings of the 34th International Conference on Coastal Engineering, Seoul, Korea, 15–20 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, T.; Altomare, C.; Veale, W.; Verwaest, T.; Trouw, K.; Troch, P.; Zijlema, M. Efficient and robust wave overtopping estimation for impermeable coastal structures in shallow foreshores using SWASH. Coast. Eng. 2017, 122, 108–123. [Google Scholar] [CrossRef]
- Van der Meer, J.W.; Snijders, W.; Regeling, E. The wave overtopping simulator. Coast. Eng. 2006, 5, 4654–4666. [Google Scholar]
- Bakker, J.; Galema, A.; Mom, R.; Steendam, G. Factual Report: Overslagproef Vechtdijk; Technical Report; Infram: Maarn, The Netherlands, 2010. [Google Scholar]
- Van Hoven, A.; Verheij, H.; Hoffmans, G.; Van der Meer, J. Evaluation and Model Development: Grass Erosion Test at the Rhine Dike; Technical Report; Deltares: Delft, The Netherlands, 2013. [Google Scholar]
- van der Meer, J.W.; Verheij, H.J.; Hoven, A.; van Hoffmans, G.J.C.M. SBW (Sterkte en Belastingen Waterkeren) Golfoverslag en Sterkte Grasbekleding—Fase 4D: Evaluatie Vechtdijk; Technical Report; Deltares: Delft, The Netherlands, 2010. [Google Scholar]
- Hoffmans, G. Erosiebestendigheid Overgangen—Validatie Engineering Tools; Technical report; Deltares: Delft, The Netherlands, 2014. [Google Scholar]
- Hughes, S.A.; Thornton, C.I. Estimation of time-varying discharge and cumulative volume in individual overtopping waves. Coast. Eng. 2016, 117, 191–204. [Google Scholar] [CrossRef]
- Verhagen, H.J.; Van der Meer, J.W. Design, Construction, Calibration and the Use of the Wave Overtopping Simulator; Technical Report; ComCoast-Infram: Delft, The Netherlands, 2007. [Google Scholar]
- OpenCFD Ltd. OpenFOAM User Guide; OpenCFD Ltd.: Paris, France, 2019. [Google Scholar]
- Roenby, J.; Bredmose, H.; Jasak, H. A computational method for sharp interface advection. R. Soc. Open Sci. 2016, 3, 160405. [Google Scholar] [CrossRef] [Green Version]
- Molines, J.; Bayón, A.; Gómez-Martín, M.E.; Medina, J.R. Numerical study of wave forces on crown walls of mound breakwaters with parapets. J. Mar. Sci. Eng. 2020, 8, 276. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Nikuradse, J. Laws of Flow in Rough Pipes; Technical report; National Advisory Committee for Aeronautics: Washington, DC, USA, 1950. [CrossRef]
- Von Kármán, T. Mechanische änlichkeit und turbulenz. In Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen, Mathematisch-Physikalische Klasse; Weidmannsche Buchh.: Berlin, Germany, 1930; pp. 58–76. [Google Scholar]
- Scheres, B.; Schüttrumpf, H.; Felder, S. Flow Resistance and Energy Dissipation in Supercritical Air-Water Flows Down Vegetated Chutes. Water Resour. Res. 2020, 56, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Scheres, B.; Schüttrumpf, H. Enhancing the ecological value of sea dikes. Water 2019, 11, 1617. [Google Scholar] [CrossRef] [Green Version]
- Van Bergeijk, V.M.; Warmink, J.J.; Frankena, M.; Hulscher, S.J. Modelling Dike Cover Erosion by Overtopping Waves: The Effects of Transitions. In Coastal Structures 2019; Goseberg, N., Schlurmann, T., Eds.; Bundesanstalt für Wasserbau: Karlsruhe, Germany, 2019; pp. 1097–1106. [Google Scholar] [CrossRef]
- Bakker, J.; Melis, R.; Mom, R. Factual Report: Overslagproeven Rivierenland; Technical Report; Infram: Maarn, The Netherlands, 2013. [Google Scholar]
- Chow, V. Open-Channel Hydraulics; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1959. [Google Scholar] [CrossRef]
- Dean, R.G.; Rosati, J.D.; Walton, T.L.; Edge, B.L. Erosional equivalences of levees: Steady and intermittent wave overtopping. Ocean Eng. 2010, 37, 104–113. [Google Scholar] [CrossRef]
- Steendam, G.J.; Van Hoven, A.; Van der Meer, J.W.; Hoffmans, G. Wave Overtopping Simulator tests on transitions and obstacles at grass covered slopes of dikes. Coast. Eng. 2014, 1, 79. [Google Scholar] [CrossRef] [Green Version]















| Experiment | Volumes (m/m) | Waves | |||
|---|---|---|---|---|---|
| Vechtdijk | V1, V2, V3, V4, V5 | V3, V5 | V3 | 0.2, 0.4, 0.6, 0.8, 1.0, 2.0, 3.0, 4.0 | 24 |
| Millingen | M1, M2, M4, M6, M8 | M1, M2, M4, M6, M8 | M3, M5, M7 | 0.4, 0.6, 0.8, 1.0, 1.5, 2.0, 2.5, 3.0, 4.0, 5.0, 5.5 | 28 |
| (mm) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| E (-) | 0.134 | 0.144 | 0.140 | 0.123 | 0.115 | 0.113 | 0.130 | 0.106 | 0.114 | 0.113 |
| (mm) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.92 | 0.88 | 0.88 | 0.88 | 0.90 | 0.87 | 0.89 | 0.96 | 0.86 | 0.87 | |
| 0.38 | 0.60 | 0.68 | 0.53 | 0.44 | 0.41 | 0.43 | 0.51 | 0.60 | 0.65 | |
| 0.86 | 0.82 | 0.81 | 0.81 | 0.82 | 1.05 | 0.89 | 0.91 | 0.92 | 1.09 |
| Profile | (cm) | (cm) | Time (min) | (m/s) |
|---|---|---|---|---|
| Vechtdijk 1 m/m m/s | 3.0 | 2.0 | 17.4 | 5.41 |
| 3.0 | 1.5 | 23.3 | 5.44 | |
| 3.0 | 2.5 | 9.0 | 5.19 | |
| 2.0 | 2.0 | 32.3 | 5.50 | |
| 5.0 | 2.0 | 5.3 | 5.37 | |
| Millingen a/d Rijn 2.5 m/m m/s | 5.0 | 3.0 | 13.5 | 6.52 |
| 5.0 | 2.0 | 18.2 | 6.59 | |
| 5.0 | 4.0 | 13.0 | 6.93 | |
| 3.0 | 3.0 | 20.0 | 6.29 | |
| 7.0 | 3.0 | 5.2 | 6.64 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
van Bergeijk, V.M.; Warmink, J.J.; Hulscher, S.J.M.H. Modelling the Wave Overtopping Flow over the Crest and the Landward Slope of Grass-Covered Flood Defences. J. Mar. Sci. Eng. 2020, 8, 489. https://doi.org/10.3390/jmse8070489
van Bergeijk VM, Warmink JJ, Hulscher SJMH. Modelling the Wave Overtopping Flow over the Crest and the Landward Slope of Grass-Covered Flood Defences. Journal of Marine Science and Engineering. 2020; 8(7):489. https://doi.org/10.3390/jmse8070489
Chicago/Turabian Stylevan Bergeijk, Vera M., Jord J. Warmink, and Suzanne J. M. H. Hulscher. 2020. "Modelling the Wave Overtopping Flow over the Crest and the Landward Slope of Grass-Covered Flood Defences" Journal of Marine Science and Engineering 8, no. 7: 489. https://doi.org/10.3390/jmse8070489