A Toy Model for Torsorial Nature of Representations

Graduate School of Business Sciences, University of Tsukuba, Tokyo 112-0012, Japan
Information 2012, 3(4), 546-566; https://doi.org/10.3390/info3040546
Submission received: 29 June 2012
/
Revised: 17 September 2012
/
Accepted: 21 September 2012
/
Published: 9 October 2012
Abstract
:This paper presents a toy model for the representation related phenomena. It is the representation that is always referred to. The represented thing in itself is indeterminate existence at a fundamental level of understanding. In order to capture such property of representation, this paper provides a toy model using an algebraic structure: torsor. The toy model captures this baselessness of representation naturally, and can be used to describe various phenomena of representations. Adopting the torsor and focusing on the two-sidedness and the closure property of representation enables the toy model to express some consistency of representations.
1. Introduction
When a child finds a blot on the wall in an airport and the blot has a form like [P], the child may regard the blot as “pee”. But another child may regard the blot as “er”. And the other child may regard the blot as “rho”. One can think of a blot as a Latin letter, a Cyrillic letter, or a Greek letter. But what on earth are we talking about? The letter that one of the children found is different from the letters found by the other children. Can we say that we are talking about the same blot? It might just happen to be this simple case. But imagine a blot which has a more complex form such as a sequence of ideographs (Chinese characters or Kanji) or Arabic letters, and suppose that one does not have enough knowledge of the writing system of Chinese, Japanese or Arabic. When a child finds a part of the blot is similar to a certain letter, can one articulate the part from the blot with confidence?
We can say that these children have different views for the blot. And even the way articulating the world depends on the one’s view. That is to say, the blot may differ from child to child.
At a certain level of understanding, an Information Gathering and Utilizing System (abbreviated as IGUS) such as the children mentioned above can be considered to be an organizationally closed system. In cybernetics, a system is said to be organizationally closed if its internal processes produce its own organization, thus continuously rebuilding the system’s identity in a changing environment [1]. An IGUS as a closed information system must interpret the differences of the physical stimuli of the outer world into information for its own by utilizing the differences within itself, and incorporate the information into itself [2]. In other words, an IGUS actively projects its internal view to obtain the information of the outer world. The view is projected on the outer world to articulate and interpret events in the outer world from the IGUS’s standpoint. Thus what we (as IGUSes) deal with are always interpretations, i.e., representations, of the outer world through one’s own view. The world itself or thing in itself cannot be directly dealt with or referred to.
Some researchers say that information, or more specifically, representation, should be regarded as something resides in between. To take some instances, Bateson [3] says that “information is··· difference which makes difference,” and Heylighen [1] says that “a representation··· constitutes an interface, it stands in between Mind and Nature, in between subject and object, in between Self and World.” Bateson gives a vague expression, while Heylighen illustrates what are adjoining the representation.
However, thinking carefully from a certain standpoint, that is, the standpoint of the present paper, this is found to bring us some difficulty. Mind and Nature, subject and object, Self and World, all of them are representations (for an IGUS) themselves. Each of them also stands in between something. We (as IGUSes) always talk only about something in between what we cannot directly refer to. It is a common difficulty, part of which can easily confirmed by casting a glance at tautologous definitions on a dictionary. To make matters worse, these representations are carved out of the world from different points of view, even when we are talking about superficially an identical thing.
In this paper, a toy model using an algebraic structure, namely, torsor, is introduced to describe and investigate an aspect of such representations. Toy model here means a simple mathematical model that reflects simplified but essential properties of target phenomena. It is used to illustrate a mechanism in order to make the phenomena easier to visualize and investigate. This research constructs the toy model by establishing a connection between the properties of representation and the structure of the algebra. By using the torsor, the toy model aims to describe naturally the representation related phenomena incorporating the “betweenness” of representation.
The structure of this paper is as follows: Section 2 reviews two important concepts in this study: the betweenness of representation and the closure. In Section 3, the algebraic structure used in our toy model, namely, torsor, is introduced. The toy model is described in Section 4. Section 5 exemplifies the toy model by several cases which are simple, but may have broad scope. Section 6 concludes this paper.
2. Representation as Janus-Faced Closure
Several studies capture information in ternary relations. In semiology, the central notions are Signe-Signifiant-Signifié (Sign-Signifier-Signified), and in semiotics, they are Sign/Representamen- Object-Interpretant. As briefly quoted in the Introduction 1, in systems theoretic study of cognitive science, Heylighen [1] says that:
a representation belongs neither to the realm of matter, of outside objects, of things-in-themselves, nor to the realm of pure mind or Platonic Ideas: it constitutes an interface, it stands in between Mind and Nature, in between subject and object, in between Self and World. (Emphasis added by the author of this paper)
In these studies, a representation (which is almost equivalent to a sign in this paper) is placed between something within an IGUS and (what corresponds to) something in the outer world.
To fix the terms and make the concept of representation discussed in this study clearer, an ontology of representation is presented next in Section 2.1.
Another important concept in this study is “closure”. Suppose that “everything is a representation”, then a simple thought on a representation mechanism requires the representation of representations, the representation of the representations of representations, ··· . That is, we need an infinite hierarchy of representations which consists of meta-representations, meta-meta-representations, and so on. This is not suitable for a fundamental mechanism of IGUS as a finite physical existence. To avoid this, we introduce the closure to stop this meta-representation hierarchy. Closure also provides a mechanism to extract a stable structure from the outer world that is evasive, indeterminate and hard to figure out directly. To form a closure, the interface nature (i.e., the betweenness) of the representation plays an essential role.
General definition of the closure is described in Section 2.2.
Summing up beforehand, in this paper, we consider a representation as what constitutes an interface that stands in between the outer world and the inner world of the IGUS under consideration. In the term of the ontology, the former corresponds to, or, can be regarded as, the Representational form, and the latter corresponds to the Proposition. They can be other representations, or, especially the former, can be substrata that are never directly referred to. (The term substratum is introduced in the next subsection.)
A solution for how to constitute a representation as an interface between substrata is provided by the closure. A representation can be considered to be a stable closure formed between indeterminate constituents, a part of outer world and the inner world of the IGUS.
2.1. Ontology of Representation
Mizoguchi [4] defines a conceptual model of representation (mainly for engineering purposes). Because the rough meaning of the terms used in this model such as class or part-of relation seem evident for our purpose, the precise definitions of the terms are omitted. Interested readers should consult [4].
A class representation is composed of two parts, form and content (as shown below).
- – Representation
- p/o "form":Representational form
- p/o "content":Proposition
where p/o stands for part-of relation/slot, ”form” is a slot name and ”:Representational form” is a class constraint the slot value has to satisfy. Its identity is inherited from the form, which is usually what people sense its existence. On the other hand, the content is the hidden part and it is a proposition that the author of the representation would like to convey through the representation.
Representational form has the conceptual structure shown below.
- – Representational form
- – Symbol sequence
- – Natural language
- – Spoken language
- – Written language
- – Artificial language
- – Musical symbol
- – Mathematical symbol, etc.
- – Image
- – Speech
Proposition is a content of a statement of the result of one’s recognition of every phenomenon that occurs in the real world. Events and Facts are Proposition and they are refined as follows:
- – Proposition
- – Design Proposition
- – Procedure
- – Music
- – Symbol
- – Specification
- – Product Proposition
- – Novel
- – Poem
- – Painting
It is important to clearly distinguish between a representation and a represented thing. Any representation is not embodied or realized unless it becomes a represented thing.
- – Represented thing
- – p/o "representation":Representation
- – p/o "medium":Representational medium
- – Representation medium
- – Physical thing
- – paper
- – canvas
- – Electronic thing
- – CD-ROM
- – etc.
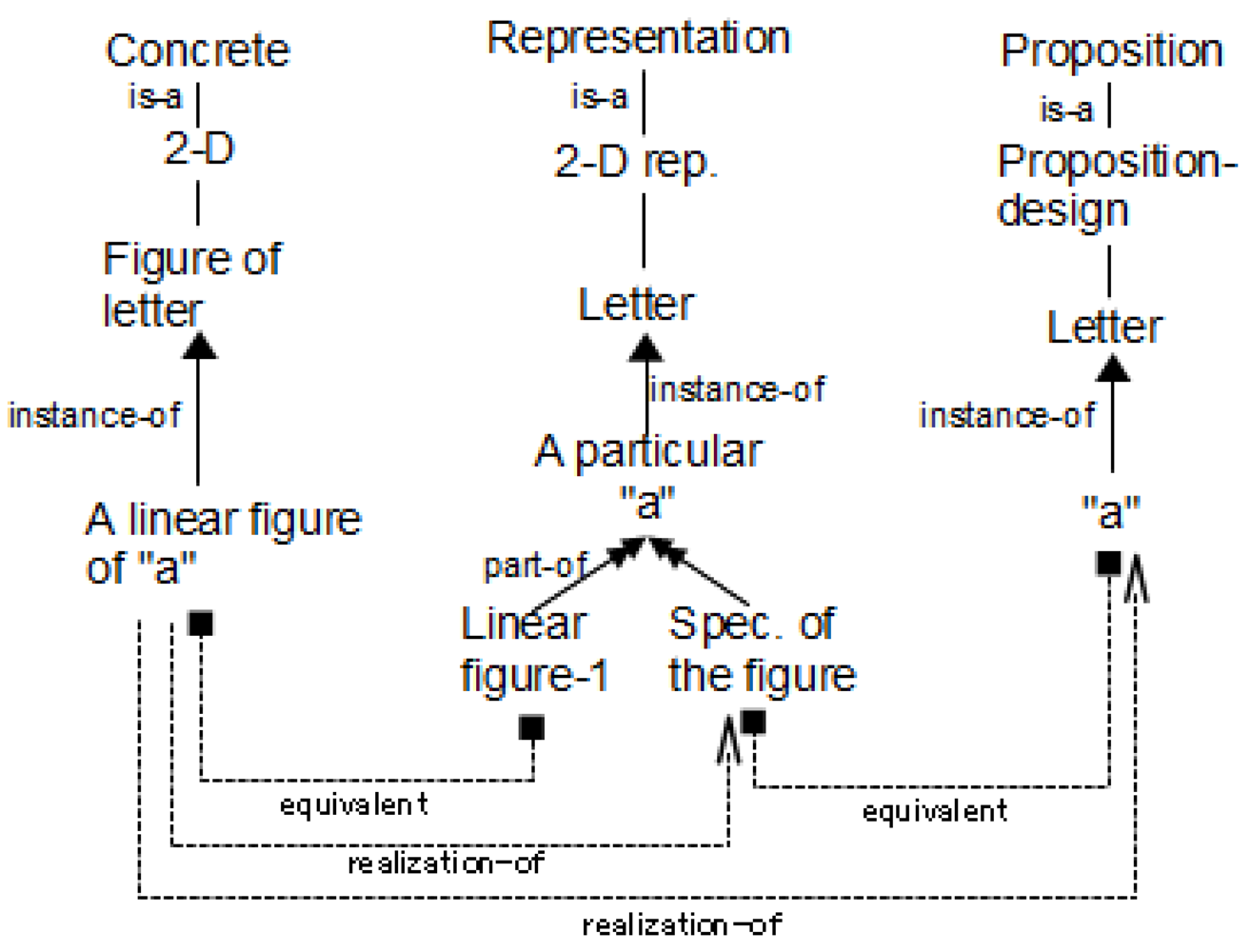
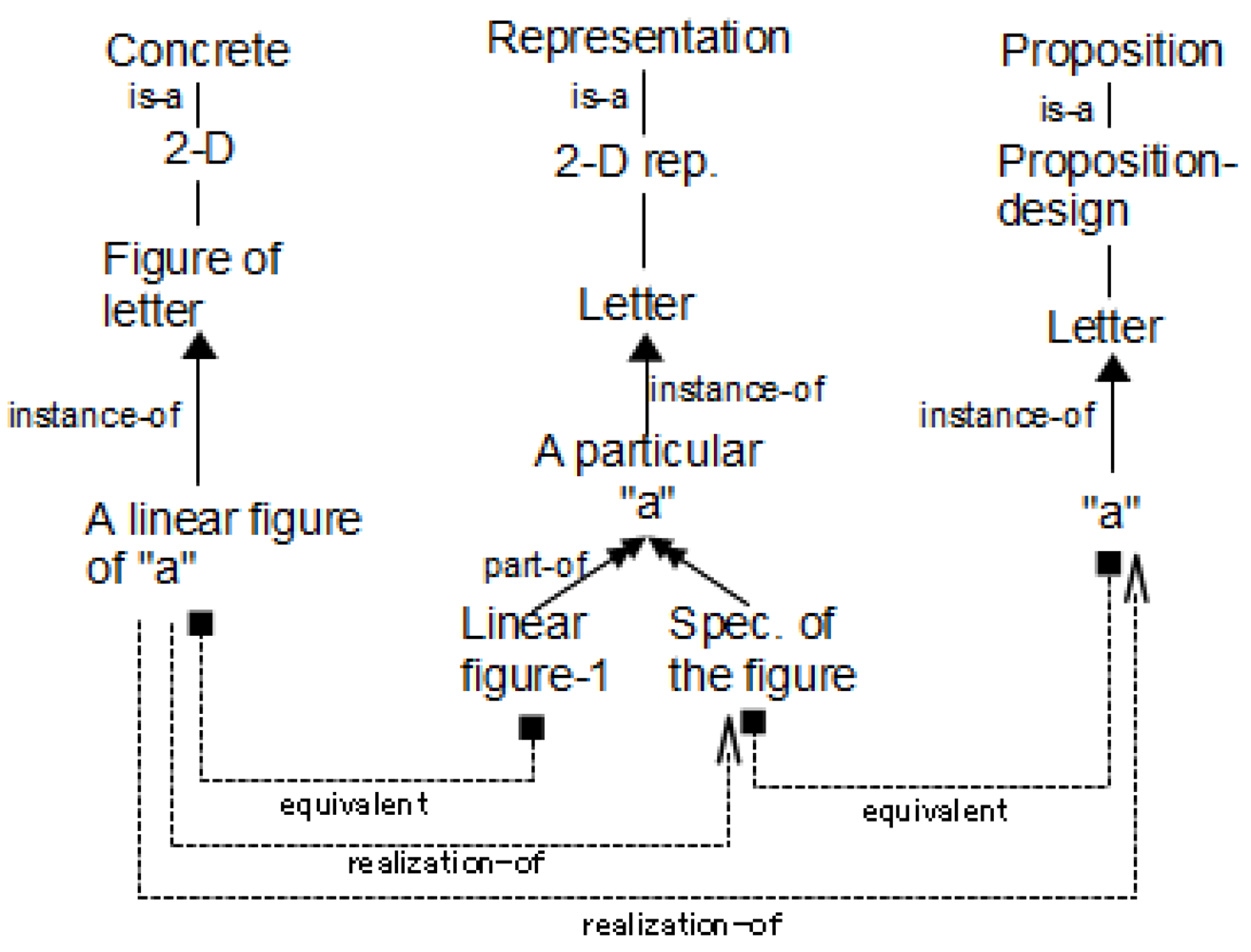
Figure 1 depicts an example of a model of a representation-the letter “a”- according to this ontology. (Excerpt with minor modifications from Figure 1 of [4])
Figure 1.
Ontology of “a”.
Since this ontology is mainly for engineering and is constructed from the standpoint that is rather too practical for our purpose, some modifications are required.
For the present study, the focal point of this ontology is that a representation is in between the Concrete, Represented thing and the Proposition, as depicted in Figure 1. From the standpoint of this paper, the Concrete, Represented thing in this ontology does not exist independently of the IGUS, and cannot be dealt by the IGUS directly. It is not even concrete in some sense. We use the word substratum instead of this Represented thing in the term of this ontology. The word substratum is used to imply the vague, indeterminate material of which something (= representation) is made and from which it derives its special qualities. A substratum might be a thing, but in general, it is a more vague and indeterminate “event”, i.e., a bunch of physical stimuli before being sensed by a certain IGUS.
The Propositions are what resides in an IGUS. In this paper, they are considered to be representations of the substrata as a part of the IGUS, or the substrata (in the IGUS) themselves. They are also not concrete against the impression of the word “proposition”.
Thus, from the standpoint of our study, the representation connects vague constituents. To be more precisely, as described next in Section 2.2, the action to represent can be considered to be an action to yield some stableness from the vague and indeterminate constituents of the representation. The Represented thing and the Proposition in the term of this ontology are, as it were, the result of a projection of this stable representation onto each of the original substrata.
2.2. Closure
The importance of the concept of “closure” is repeatedly emphasized in many fields such as the systems theory, cybernetics, and complex systems theories. (See [5,6], for example.)
Mathematical definition of the closure is as follows:
Definition. Closure is an operation C on sets, C : A → A∗, with the following properties:
- A ⊆ A∗ (monotonicity)
- (A∗)∗ = A∗ (idempotence)
- A ⊆ B ⇒ A∗ ⊆ B∗ (inclusion preservation)
A set A is called closed if A∗ = A. Intuitively, such a closure of a set means that somehow “missing elements” are added to it, until no more of them are needed.
In this paper, important is the case in which a closure is formed reciprocally, i.e., adjunctively by two sets. We formalize this using the Chu space [7]. (For the interpretation of Chu space in this subsection, the author has referred to the description in [8].)
Definition. A Chu space (X, S, R) consists of two sets X, S and a relation R between them. If an element x of X has the relation R with an element s of S, we write
![Information 03 00546 i001]()

Suppose that an IGUS has a Chu space within it. We assume that every element of X represents the IGUS’s experience and every element of S represents the nature or property of the experience. x ⊨ s is interpreted as representing the relation that a certain experience x has a certain property s. Then we can have the set of all the properties the IGUS remembers when it encounters a particular experience x:
![Information 03 00546 i002]() and the set of all the common properties for a collection Y of some experiences:
and the set of all the common properties for a collection Y of some experiences:
![Information 03 00546 i003]()


Similarly, for all experiences that have a particular property s in common, we can have the set of all such experiences as
![Information 03 00546 i004]()

For all the experiences that have all its properties in a collection T of some properties, we can also have the set of all such experiences as
![Information 03 00546 i005]()

Using the above sets, define two operations:
![Information 03 00546 i006]()
![Information 03 00546 i007]() and two composites:
and two composites:
![Information 03 00546 i008]()
![Information 03 00546 i009]() where PS and PX are the power set of S and X, respectively. Operations γµ and µγ are closure operators. If Y = Y∗, then Y is said to be closed. Similarly, if T = T∗, then T is also said to be closed. The closed experience set Y can be regarded as a stable articulation of experiences, and the closed property set can be regarded as stable composite idea.
where PS and PX are the power set of S and X, respectively. Operations γµ and µγ are closure operators. If Y = Y∗, then Y is said to be closed. Similarly, if T = T∗, then T is also said to be closed. The closed experience set Y can be regarded as a stable articulation of experiences, and the closed property set can be regarded as stable composite idea.




All the closed experience sets and all the closed property sets both have a structure called the complete lattice, and determine each other reciprocally (Galois correspondence). Some researchers call the pair of the closed experience set and the closed property set that determine each other in this structure as a formal concept [9].
Such a closure formed by two sets plays a significant role in our toy model. Representations can be considered to be, in a sense, a closure of its two constituents. This construction with two sets enables dynamic yielding of views and representations. But first, an algebraic structure, torsor is introduced.
3. Torsor
In abstract algebra, there exists a suitable structure to represent the above mentioned facets of representation, that is, a torsor. There are several equivalent versions, going under different names such as heap, groud, flock, herd, principal homogeneous space, abstract coset, pregroup or others. We use what seems to be the most suitable term, namely, torsor (the word torsor evidently seems to be originated from torso-something that is left unfinished). For a brief introduction including some history, the readers should refer to the appendix A of [10] and references cited therein.
Definition. A torsor (G, (·, ·, ·)) is a set G together with a ternary operation G× G× G → G;(x, y, z) → [xyz] satisfying the identities: for all x, y, z, u, v ∈ G
![Information 03 00546 i010]()
![Information 03 00546 i011]()


The set of isomorphisms between two isomorphic objects naturally forms a torsor, with the operation [fgh] = fg-1h (here juxtaposition denotes composition of functions). This torsor becomes a group once a particular isomorphism by which the two objects are to be identified is chosen.
Torsors are everywhere [11]. Here are some examples of the torsor.
Integers If x, y, z are integers, we can set [xyz] = x − y + z to produce a torsor.
Miscellaneous Energies, voltages, indefinite integrals, and many others are torsors (see [11]).
In this paper, the only derived property of the torsor to which we refer is the following.
Proposition 1. [xy[zuv]] = [ x[uzy] v]
4. Toy Model-Interpretation of Torsor
In this section, a toy model to describe a certain aspect of representations is built. More specifically, we build a model which describes some kinds of consistency of representations. The toy model is built by fixing the interpretation of the structure of a torsor into the words describing the target representation phenomenon. Because the structures of representation phenomena are not fully understood yet, the interpretation determining the toy model is defined in a rather vague manner, that is, by using the undefined but suggestive words. Precise interpretation must be given formally or informally in each study of a specific phenomenon. Some such examples are provided in the next section.
4.1. Interpretations of the Elements and Operation
Let us interpret each element of a torsor H as a representation, and the ternary operation [xyx] ∈ H as “the representation of a substratum which yields the representation zin the view of y, and the representation [xyx] is obtained in the view of x”, where the word substratum is used here to express the represented thing somewhat abstractly. Though this interpretation might seem to introduce two sorts, view and representation, it is not the case. The word view is simply a nickname of representation to suggest its role. It is used for understandability, and all the elements of a torsor are uniformly interpreted as representations of physical situation in the real physical world.
Dictionary definition of view is a mode or manner of looking at or regarding something. But, as can be seen later on, more active picture may be appropriate in this paper. A view actually yields a representation. A mechanism of this and the operational meaning of the word yield will be described in Section 4.4.
Note that there are two choices of the standpoint of views when using this toy model, namely, local standpoints and the transcendental standpoint. In principle, all the phenomena are local, closely associated with each, particular IGUS. Hence all the elements of the torsor implicitly have an index to represent the IGUS. This is on local standpoints. However, one (as an IGUS) can set all the views by one’s own view. This standpoint viewing the overall situation is called the transcendental standpoint. Appropriate standpoint depends on the case.
Also note that though the word substratum is used explicitly in above mentioned and following interpretations, the corresponding term does not exist in the formulae of torsor. This is one of the reasons to use the torsor. Because we usually regard representation as “re”-presentation of represented something, the descriptions of the interpretation in this section follow such a custom. However, the fact is, from the standpoint of this paper, that the represented, i.e., the substratum, which is the fundamental source of a representation, cannot be directly referred to. An IGUS must refer to the substratum only via its representation. Thus for the IGUS, the substratum is an unspecifiable existence. By using torsors, we can argue the matters of representations without directly referring to a raw event, “Ding an sich”, or a substratum which yields the representations.
4.2. Interpretation of the Identity Law
Recall that the identity law of the torsor is:
![Information 03 00546 i012]()

The first equation can be interpreted to mean that the representation of a substratum that yields the representation xin the view of ais x, and the representation [aax] is obtained in the view of a. To be short, the same view yields the same representation.
The second equation can be interpreted to mean that the representation of a substratum which yields the representation ain the view of ais x, and the representation [xaa] is obtained in the view of x. This means that there is (at least) a substratum that yields the representation itself for all representations (or views).
These interpretations of the identity law seem quite natural, as required properties of the representation phenomena.
4.3. Interpretation of the Para-associative Law
Recall that the para-associative law of the torsor is:
![Information 03 00546 i013]()

The verbatim interpretation of the requirement for the para-associative law is somewhat messy. This is also one of the reasons for using the language of algebra. Instead of analyzing in the words, we will use diagrams.
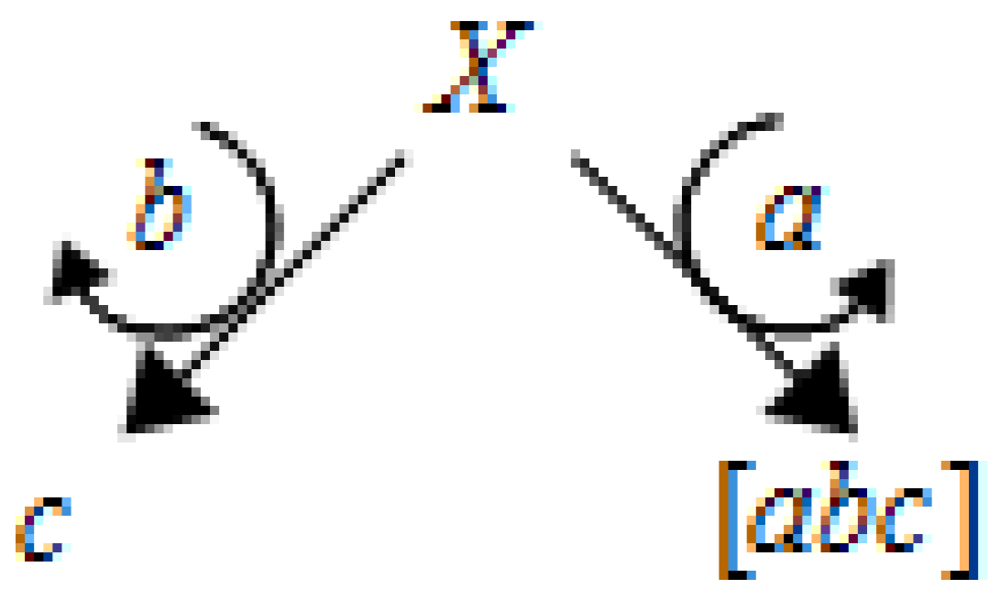
To begin with, the situation of [abc] is depicted as Figure 2, where b and a are views and X represents a substratum, i.e., the represented, that yields c and [abc]. Comparing with the definition of the interpretation of the ternary operation [abc]: the representation of a substratum which yields the representation cin the view of b, and the representation [abc] is obtained in the view of a, the meaning of the diagram seems clear. The diagram corresponds to the interpretation.
Figure 2.
Ternary operation of torsor.
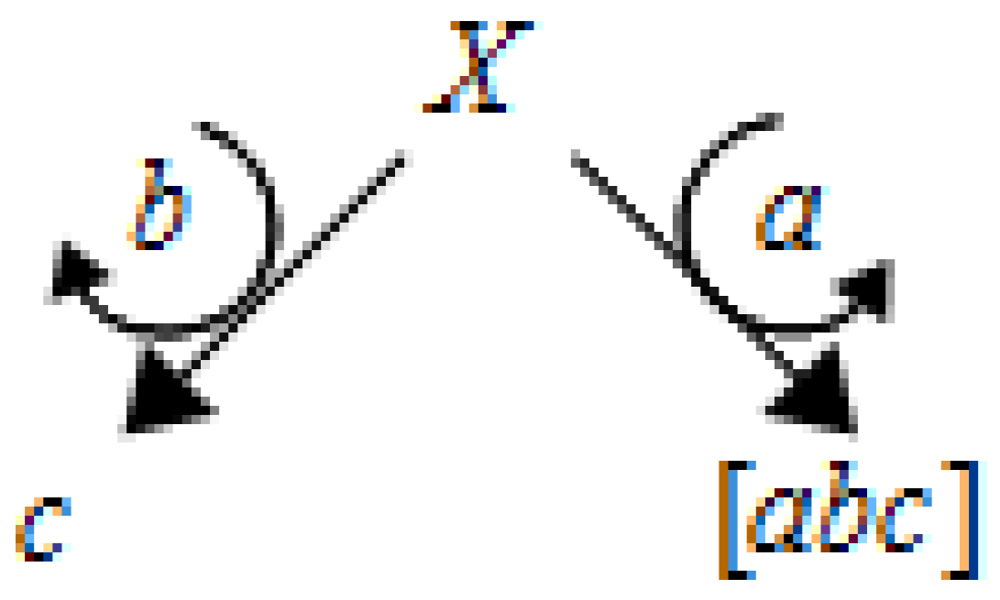
A formula form is also used with the figure form interchangeably. For the situation of Figure 2, we also write
![Information 03 00546 i014]()
![Information 03 00546 i015]()


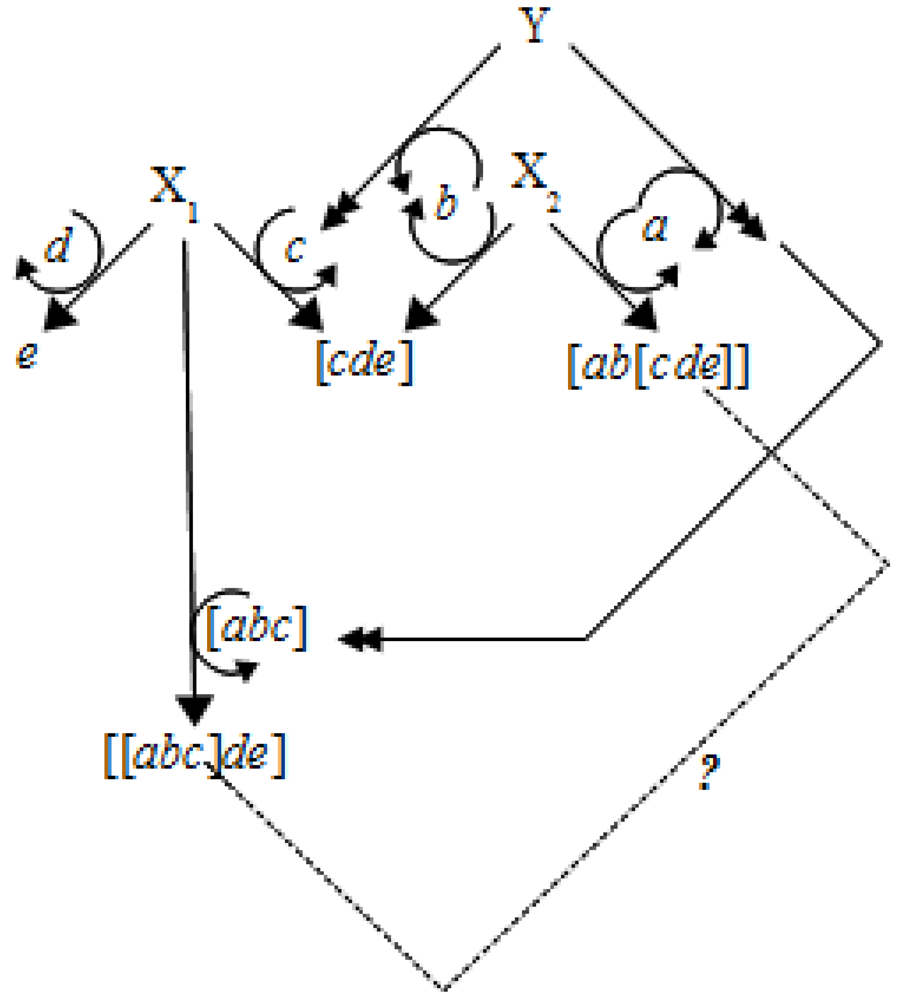
Using this diagram, the situation of the para-associative law can be depicted as in Figure 3. where X1 and X2 are the substrata again, and Y is also the substratum. X1 and X2 yield representations, but Y yields views. The view c is Y in the view of b, and the view [abc] is Y in the view of a. The point here is the representation [cde] is yielded in the view of c and in the view of b simultaneously. Starting from that point, we will trace how this diagram is built. From the transcendental standpoint, it is easy to understand.
Figure 3.
Para-associative law.
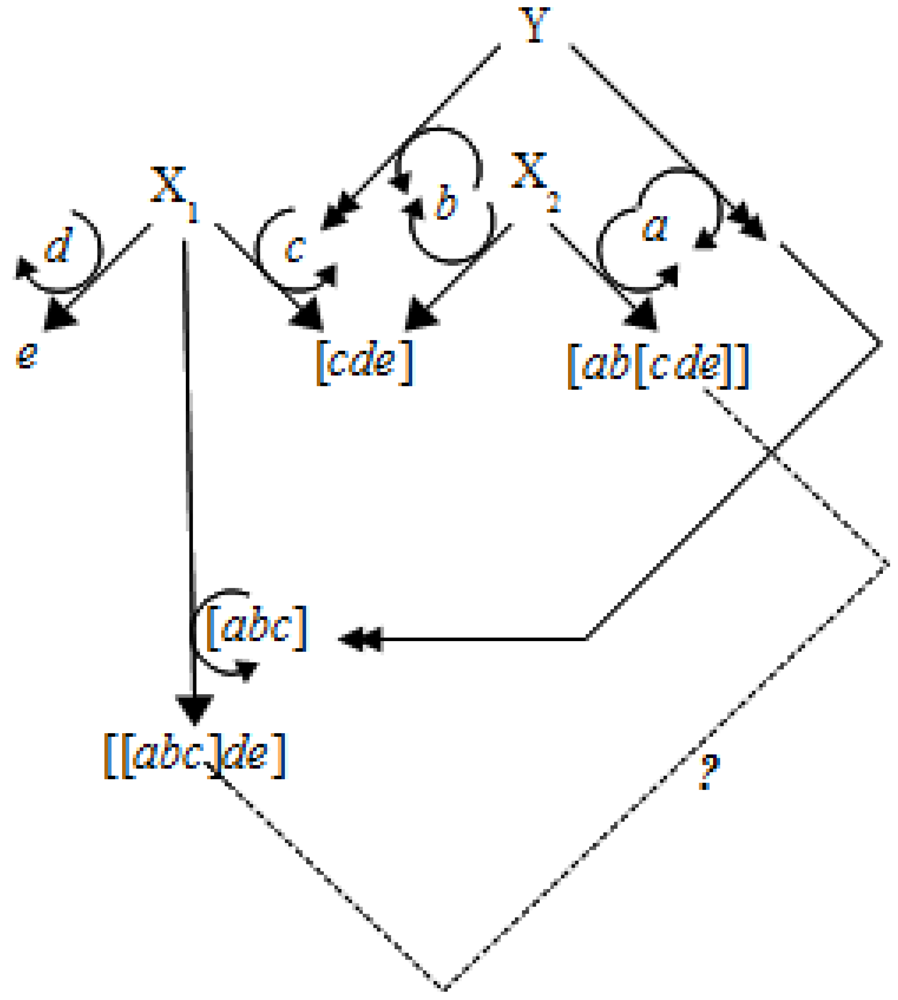
In our interpretation, for the existence of [ab[cde]], there must exist a substratum X2 that yields both of [ab[cde]] and [cde].
![Information 03 00546 i016]()
![Information 03 00546 i017]()


But [cde] itself is what is define by
![Information 03 00546 i018]()
![Information 03 00546 i019]() thus [cde] can be yielded by the substratum X1 other than X2. So, more precisely, the situation is: for given (a, )b, c, d, e ∈ H,
thus [cde] can be yielded by the substratum X1 other than X2. So, more precisely, the situation is: for given (a, )b, c, d, e ∈ H,
![Information 03 00546 i020]()
![Information 03 00546 i021]() and
and
![Information 03 00546 i022]()





Thus there must be a restriction for c and b to make the Equation (22) hold.
The coexistence of the views c and b requires the existence of the substratum Y , which yields c in the view of b, because (since there is no other assumption on the existence of the view that may yield the view c and b) the coexistence of c and b means that the representation c can be yielded by some substratum (Y ) in the view of b (and some other substratum yields b in the view c). With the existence of the substratum Y, [abc] can be yielded in the view of a.
Then, in the view of [abc], we can have [[abc]de] from the substratum X1. The diagram is completed.
Thus the para-associative law can be considered as a requirement for some kind of consistency among representations.
Naturally enough, it is not evident whether the reality conforms the para-associative law. Whether the law holds or not may depend on the case. When the law does not hold, it may be an indication that the representations may lack some consistencies. In that case, a representation used by an IGUS may be incomprehensible by another IGUS. To investigate such a matter on this toy model is expected to reveal some essential properties of the representation.
4.4. Role of the Closure
To make the above mentioned interpretations attainable, the concept of closure described in Section 2.2 plays a significant role in this toy model. It provides a mechanism to yield a new representation from a pair of representations or a pair of a substratum and a representation. Especially, it enables yielding views without a meta-representation hierarchy.
As demonstrated previously in Section 4.3, in our interpretation, we must have some mechanism to make the following hold
![Information 03 00546 i023]()
![Information 03 00546 i024]()
![Information 03 00546 i025]()



The view b yields both a representation [cde] and a view c. Though the substrata used are different, they are constituents only used to explain the interpretation and not the elements in the torsor, i.e., the toy model. Our basic assumption is that all the constituents of the model are representation. Hence we must have a mechanism that can be understood in the language of representation.
Closure reviewed in Section 2.2 can provide such a mechanism. Recall that, as reviewed in Section 2.1, any representation has two constituents. In accordance with this, a representation is considered to be a closure originated from two substrata, each of which vague and indeterminate. By forming the representation, these substrata become indirectly accessible for an IGUS by referring to the representation.
This two constituent construction enables representations to yield another representation uniformly, that is, irrespective of view or representation. It is done by the process like the genetic recombination: one of the constituents separates from the other constituents, then, it links with another substratum (or a constituent of another representation), and finally, this new pair yields another stable representation by forming a closure. A view, namely, a representation which reflects something internal to an IGUS, is considered to be yielded by such a view ing process.
Thus, we can regard the interpretation of the toy model as valid by making the two assumptions:
- the representation as a closure formed by two constituents
- the above mentioned yielding process
4.5. Summary: How to Use the Toy Model
Following all the construction of the toy model mentioned above, we summarize here the steps to use it.
- Identify representations to examine, and assume that they satisfy the axioms of the torsor;
- identify the two constituents of the representations which form a closure;
- fix the meaning of the equality in the algebra;
- compare algebraic consequences with the reality of the phenomena.
The step three requires some notes. The equality in the torsor, such as the Equation (22), may be often too strong as a condition for the relation of representations, if it is interpreted literally as identity. In many cases, weaker condition (for instance, some equivalence relation) may be more appropriate. Thus we should select and fix the appropriate equality relation.
5. Examples
In this section, we exemplify the toy model by three elementary but suggestive cases.
5.1. Substitution Cipher-Group Operation
The substitution cipher is exemplified as the first case. Because substitutions or permutations form a group (an algebraic structure in mathematics), as already mentioned, it is evident that they also form a torsor by defining [xyz] = xy-1z [12]. However, this case is explicitly written down here to clarify what we do.
Suppose that the set H is a collection of all the character strings, each of which consisting of different letters in L. For instance, suppose that the set L = {1, 2, 3, 4, 5}, then H = {12345, 12354,..., 54321}, which has 5! = 120 elements. A substitution cipher, i.e., permutation, is often represented by Cauchy’s two-line notation, one lists the elements of L in the first row, and for each one its image under the permutation below it in the second row. For instance, a particular permutation of the set {1, 2, 3, 4, 5} can be written as: σ = ![Information 03 00546 i051]() . Suppose that we fix the first row of this notation as 12345. Then one can represent a particular permutation only by a string, e.g., 32514 for above σ . In other words, we consider H is isomorphic to the permutation S5 of five elements.
. Suppose that we fix the first row of this notation as 12345. Then one can represent a particular permutation only by a string, e.g., 32514 for above σ . In other words, we consider H is isomorphic to the permutation S5 of five elements.
 . Suppose that we fix the first row of this notation as 12345. Then one can represent a particular permutation only by a string, e.g., 32514 for above σ . In other words, we consider H is isomorphic to the permutation S5 of five elements.
. Suppose that we fix the first row of this notation as 12345. Then one can represent a particular permutation only by a string, e.g., 32514 for above σ . In other words, we consider H is isomorphic to the permutation S5 of five elements. Let us verify the para-associative law by a particular example. Suppose that b = 13524, c = 52413, d = 32541, e = 14523. We write a = a1a2a3a4a5. As for [cde], because e is yielded in the view of d, the substratum (which can be explicitly represented in this case) is ![Information 03 00546 i051]() -114523. Then
-114523. Then
![Information 03 00546 i026]() then
then
![Information 03 00546 i027]() In the same manner,
In the same manner,
![Information 03 00546 i028]() then,
then,
![Information 03 00546 i029]()
-114523. Then 



Therefore, [ab[cde]] = [[abc]de], as expected. Thus the axiom of torsor holds for this substitution cipher (and substitution ciphers in general).
The property of the torsor, Proposition 1, [ab[cde]] = [ a[dcb] e] holds naturally as follows:
![Information 03 00546 i030]() hence
hence
![Information 03 00546 i031]()


5.2. Multiple Views for the Real World
To investigate formally, we assume the situation modeled by a Chu space (Section 2.2), namely, the formal context in the FCA [9]. A formal concept in FCA links a set of objects and a set of attributes. It can be regarded as a representation in which the objects and attributes correspond to the Representational form and Proposition, respectively.
In the situation where there are multiple IGUSes, their stable articulations of experiences and stable composite ideas, namely, formal concepts, naturally differ for every IGUS. In other words, all IGUSes have different views for the world. These multiple views for the real world may yield different formal concepts and their (inclusion) structures. But this incommensurability is overcome to some extent in the actual world. For instance, if two of the structure of formal concepts yielded from different views are isomorphic (though the isomorphism is rather strong condition), one can say that these two views are compatible. The representations based on the compatible views are also compatible, and the compatible representation is comprehensible by each IGUS not having the original view but having a compatible view.
5.2.1. Known Facts on FCA
First, some related concepts and results on FCA [9] are summarized.
Definition 1. A formal context ![Information 03 00546 i052]() = (G, M, I) consists of two sets G and M and a relation I between G and M. The elements of G are called the formal objects and the element of M are called the formal attributes of the context. When an object g is in the relation I with an attribute m, we write g ⊨ m or (g, m) ∈ I and read it as “the object ghas the attribute m”.
= (G, M, I) consists of two sets G and M and a relation I between G and M. The elements of G are called the formal objects and the element of M are called the formal attributes of the context. When an object g is in the relation I with an attribute m, we write g ⊨ m or (g, m) ∈ I and read it as “the object ghas the attribute m”.
 = (G, M, I) consists of two sets G and M and a relation I between G and M. The elements of G are called the formal objects and the element of M are called the formal attributes of the context. When an object g is in the relation I with an attribute m, we write g ⊨ m or (g, m) ∈ I and read it as “the object ghas the attribute m”.
= (G, M, I) consists of two sets G and M and a relation I between G and M. The elements of G are called the formal objects and the element of M are called the formal attributes of the context. When an object g is in the relation I with an attribute m, we write g ⊨ m or (g, m) ∈ I and read it as “the object ghas the attribute m”. In the above and following definitions, the word “formal” is often omitted where it is obvious.
Definition 2. For a set A ⊆ G of objects we defi ne
![Information 03 00546 i032]() (the set of attributes common to the objects in A). Correspondingly, for a set B ⊆ M of attributes we define
(the set of attributes common to the objects in A). Correspondingly, for a set B ⊆ M of attributes we define
![Information 03 00546 i033]() (the set of objects which have all attributes in B).
(the set of objects which have all attributes in B).


Definition 3. A formal concept of the context (G, M, I) is a pair (A, B) with A ⊆ G, B ⊆ M, µ( A) = B and γ( B) = A. We call A the extent and B the intent of the concept (A, B). ![Information 03 00546 i053]() (G, M, I) denotes the set of all concepts of the context (G, M, I).
(G, M, I) denotes the set of all concepts of the context (G, M, I).
 (G, M, I) denotes the set of all concepts of the context (G, M, I).
(G, M, I) denotes the set of all concepts of the context (G, M, I). The two operators µ and γ form a Galois connection between the power-set lattices of G and M. Hence we obtain two closure systems on G and M, which are dually isomorphic to each other.
We consider a part of the whole context.
Definition 4. If (G, M, I) is a formal context and if H ⊆ G and N ⊆ M, then (H, N, I ∩ H × N) is called a subcontext of (G, M, I).
Subcontexts that have some compatibility are important.
Definition 5. A subcontext (H, N, I ∩ H × N) is called compatible if the pair ( A ∩ H, B ∩ N) is a concept of the subcontext for every concept (A, B) ∈ B(G, M, I).
In the case of finite contexts, the compatible subcontexts can be identified by means of the arrow-relations.
Definition 6. If (G, M, I) is a context, g ∈ G an object, and m ∈ M an attribute, we write
![Information 03 00546 i034]()
![Information 03 00546 i035]()


Thus, g ↙ m holds if and only if g does not have the attribute m, but m is contained in the intent of every proper subconcept of (γµ({g}),µ({g})).
Definition 7. A subcontext (H, N, I ∩ H × N) of a clarified context (G, M, I) is arrow-closed if the following holds: h ↗ m and h ∈ H together imply m ∈ N, and g ↙ n and n ∈ N together imply g ∈ H.
The next proposition holds.
Proposition 2. Every compatible subcontext is arrow-closed. Every arrow-closed subcontext of a finite context is compatible.
5.2.2. A Model
Using known facts mentioned above, a multiple views situation is modeled by the toy model.
In this model, we interpret the equality in the formulae of the torsor as the compatibility of the formal concept structure, i.e., the compatibility of corresponding formal context. This interpretation is legitimate because if the contexts behind the formal concept structure are compatible, then the structures are isomorphic as for the common concepts. Thus IGUSes which have different views can agree on the identification of concepts.
For a given formal context C = (G, M, I), an operation ![Information 03 00546 i054]() : G → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset H0 of the formal object G. Similarly, an operation
: G → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset H0 of the formal object G. Similarly, an operation ![Information 03 00546 i055]() : M → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset N0 of the formal attribute M. These operations, combined with projection, are defined for later convenience:
: M → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset N0 of the formal attribute M. These operations, combined with projection, are defined for later convenience:
![Information 03 00546 i036]()
![Information 03 00546 i037]()
 : G → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset H0 of the formal object G. Similarly, an operation
: G → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset H0 of the formal object G. Similarly, an operation  : M → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset N0 of the formal attribute M. These operations, combined with projection, are defined for later convenience:
: M → G × M is defined as extracting the minimum arrow-closed subcontext containing any specified subset N0 of the formal attribute M. These operations, combined with projection, are defined for later convenience: 

The view πH0 generated with any specified subset H0 of the formal object G is defined as
![Information 03 00546 i038]()
![Information 03 00546 i039]()


Similarly, the view ρN0 generated with any specified subset N0 of the formal attribute M is defined as
![Information 03 00546 i040]()
![Information 03 00546 i041]()


They satisfies the following formulas: πH ◦ πH = πH , ρN> ◦ ρN = ρN , hence each of them is a kind of projection.
Each element of the model is associated with any subset H0 of G or N0 of M. But as a view, it works as πH0 or ρN0 , that is, it induces an arrow-closed subcontext including the associated subset.
We can have canonical correspondence between the view defined above and the formal context (G, M, I) and the set of formal concepts ![Information 03 00546 i053]() (G, M, I). Hence by corresponding a set of formal concepts with representation, we can handle the view and the representation uniformly. Formal contexts brought by these views are arrow-closed subcontexts, hence they are comptible with the original context C = (G, M, I). On these assumptions, the axioms of the torsor are automatically satisfied.
(G, M, I). Hence by corresponding a set of formal concepts with representation, we can handle the view and the representation uniformly. Formal contexts brought by these views are arrow-closed subcontexts, hence they are comptible with the original context C = (G, M, I). On these assumptions, the axioms of the torsor are automatically satisfied.
(G, M, I). Hence by corresponding a set of formal concepts with representation, we can handle the view and the representation uniformly. Formal contexts brought by these views are arrow-closed subcontexts, hence they are comptible with the original context C = (G, M, I). On these assumptions, the axioms of the torsor are automatically satisfied. 5.2.3. A Concrete Example
Suppose that we have a context C = (G, M, I), where G = {g1,g2,g3,g4}, M = {m1, m2, m3, m4, m5} and I is defined by the Table 1 (Figure 3.2 of [9]).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m1 | m2 | m3 | m4 | m5 | |
|---|---|---|---|---|---|
| g1 | x | x | |||
| g2 | x | x | x | x | |
| g3 | x | x | |||
| g4 | x | x | x |
We adopt the transcendental view for simplicity. In other words, the context C is assumed to be global.
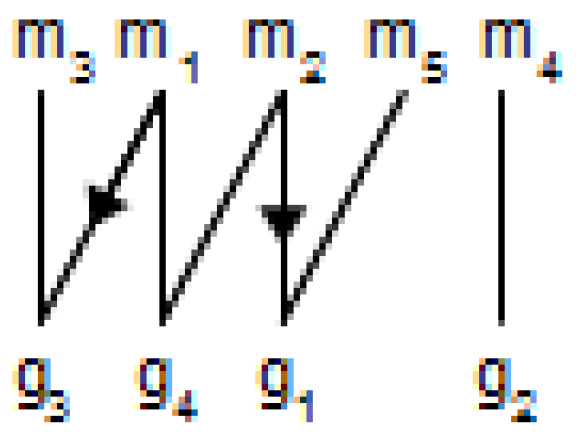
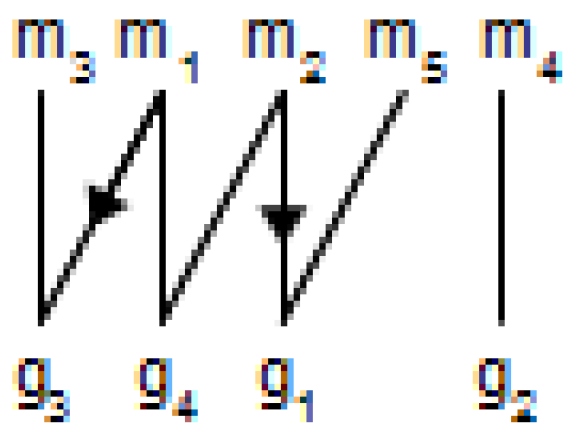
The arrow-closed subcontext can be easily obtained from the graph of arrows (Figure 4) drawn by
Definition 6. For example, if we start with a subset {m2}, by chasing the links and collecting all the reachable elements, we have
![Information 03 00546 i046]() as the arrow-closed subcontext. Note that in the Figure 4, the links m2 to g1 and m1 to g3 are unidirectional, and the others are bidirectional. Thus if we start with a subset {g1}, the arrow-closed subset induced by the subset is ({g1}, {m5},I ∩{g1}×{m5}).
as the arrow-closed subcontext. Note that in the Figure 4, the links m2 to g1 and m1 to g3 are unidirectional, and the others are bidirectional. Thus if we start with a subset {g1}, the arrow-closed subset induced by the subset is ({g1}, {m5},I ∩{g1}×{m5}).

Figure 4.
The graph of arrows.
| Element | a | b | c | d | e |
|---|---|---|---|---|---|
| H0 | {g4} | {g1,g2,g3} | - | {g1,g2} | |
| N0 | - | - | {m3,m5} | - | |
| H | {g1,g3,g4} | {g1g2g3} | {g1g3} | {g1g2} | Obtained from d |
| N | {m1,m2m3,m5} | {m3,m4m5} | {m3,m5} | {m4,m5} | Obtained from d |
Then, what is the interpretation of [cde]? Since the context C is assumed to be global, it can be regarded as the substratum for all representations. Thus e is obtained by applying ρ{g1,g2} to C. Asa result, e is a formal concept lattice of subcontext:
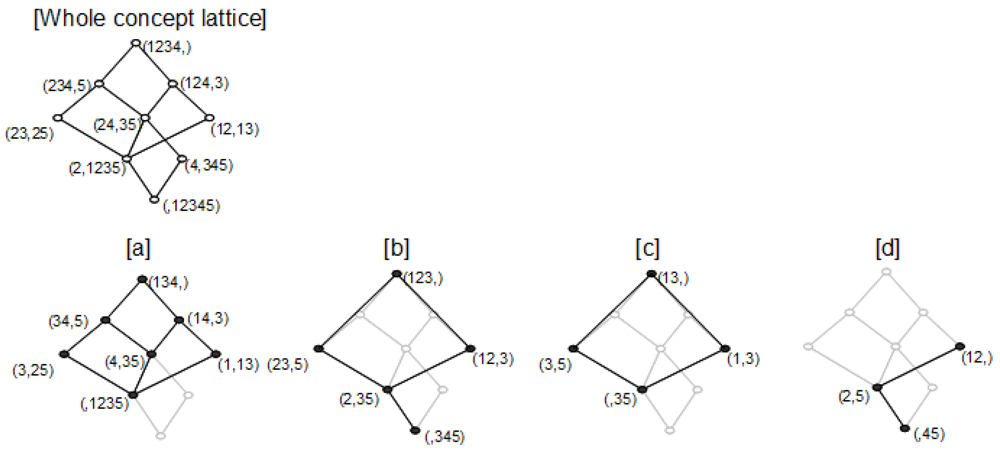
![Information 03 00546 i047]() (It is a chain of {g1,g2} and {g2} and ∅. See Figure 5d.) Recall that there is a canonical correspondence between the view and the formal context and the set of formal concepts.
(It is a chain of {g1,g2} and {g2} and ∅. See Figure 5d.) Recall that there is a canonical correspondence between the view and the formal context and the set of formal concepts.

In the same way, a formal concept lattice of subcontext in the view of c is:
![Information 03 00546 i048]() (It is an anti-chain of {g1} and {g3}. See Figure 5c.) It corresponds to [cde].
(It is an anti-chain of {g1} and {g3}. See Figure 5c.) It corresponds to [cde].

Figure 5.
Concept lattices for full and subcontexts.

The context(= substratum)C in the view of b is also the formal concept lattice of subcontext:
![Information 03 00546 i049]() (See Figure 5b.) This lattice embeds the lattice of [cde], thus “modulo” irrelevant elements, the Equation (22) holds.
(See Figure 5b.) This lattice embeds the lattice of [cde], thus “modulo” irrelevant elements, the Equation (22) holds.

The context in the view of a is the formal concept lattice of subcontext:
![Information 03 00546 i050]() This is a seven element lattice of {∅, {g1}, {g3}, {g4}, {g1,g4}, {g3,g4}, {g1,g3,g4}} (see Figure 5a). This corresponds to [ab[cde]].
This is a seven element lattice of {∅, {g1}, {g3}, {g4}, {g1,g4}, {g3,g4}, {g1,g3,g4}} (see Figure 5a). This corresponds to [ab[cde]].

Similarly, since [abc] is yielded by the view a, the induced formal concept lattice [abc] must be embedded into the lattice of a (Figure 5a). Also, the formal concept lattice [[abc]de] induced by [abc] must be embedded into the lattice of [ a]-that is, in the [ab[cde]]. Hence, the axiom [ab[cde]] = [[abc]de] holds “modulo” irrelevant elements, as expected,
Note that although the context C is assumed to be global for simplicity in this section, this is not mandatory. As can be understood from above procedures, a context as a substratum can omit the irrelevant objects or attributes to the views applied to the substratum.
The property of the torsor, Proposition 1, [ a[dcb] e] = [ab[cde]], can verified in the same manner.
5.3. Letter Recognition
The use of the toy model is not necessarily restricted to mathematically concrete models. It can be used for more abstract situations.
Let us consider the case described in Section 1. A child see a blot as the letter “pee”, another child as “er” and the other child “rho”. One part of the situation can be described as what is a letter “rho” in the view of G is regarded as “pee” in the view of E. Thus, in the term of the toy model,
![Information 03 00546 i042]()

Another part of the situation can be described as what is a letter “pee” in the view of E' is regarded as “er” in the view of R. In the term of the toy model,
![Information 03 00546 i043]() therefore, in combination with the previous equation,
therefore, in combination with the previous equation,
![Information 03 00546 i044]()


In these equations, G is a Greek letter-related view, E, E' (not necessarily different) are English or Latin letter-related views, R is a Cyrillic letter-related view, and <rho>, <pee>, <er> are (possibly, utterance-related) representations.
In the axiom of the toy model,
![Information 03 00546 i045]() must be hold. Let us consider what it means in this situation.
must be hold. Let us consider what it means in this situation.

The point is the term [RE'E] in the right hand of the equation. It must be considered to be a view for what is a letter “rho” in the view of G. This term is interpreted as the representation of a substratum that yields the representation E in the view of E', and the representation [RE'E] is obtained in the view of R. Extremely roughly speaking, since the view [RE'E] is something obtained in the view of R,a Cyrillic letter-related view, [RE' E] might be also a Cyrillic letter-related view, and hence [[RE' E] G(rho)] = (er). But a closer examination is required.
In fact, the construction of the toy model provides an insight. In the construction, all representations and views consists of two constituents. One is concrete, belonging to the outer world, and the other is belonging to the inner world of the IGUS. The constituents of the views like G, E,E ' ,R can be considered to be something like a space of topological configurations of the blots and something like a space of (to be) written languages. The space of topological configurations of the blots is articulated enough to represent letters of a language, in accordance with an articulation of the space of differences required to represent utterances of a language. The latter spaces naturally vary from language to language, and both of the spaces vary from IGUS to IGUS. As can be known, the criteria for allowable forms of a certain letter in a certain language may slightly vary from person to person.
Thus the view [RE' E] can be understood to be constructed as a closure of a space of topological configuration of blots and a space of (to be) written Russian language, and the former space also yields a view E together with a space originated in E' .
Needless to say, this is one of the possibilities. More studies in the linguistics and other related fields are required for clearer understanding. However, investigations using the toy model in this study must be helpful in such a case.
6. Conclusions
In this paper, an algebraic toy model for representation is developed. By using torsor as the algebraic structure of the model, one can avoid directly mentioning the represented thing, which is unrealistic at a fundamental level of understanding.
This paper presents how to interpret a representation phenomenon to the algebraic structure of the model. The correspondence relations of the elements, the two-sidedness of representation and the closure concept play significant roles in the construction of the toy model. Through the examples, it is shown that the axioms of torsor tend to hold and correspond to some consistency requirement for the representation.
The mathematical formulation of the toy model presented in this paper is naturally not definitive. As is mentioned in Section 3, the torsorial concept has been formulated in various equivalent forms. In addition to them, even in mathematically more foundational levels, one may replace the set theory, which is the base of the formulation of the closure and torsorial concept in the toy model in the present paper, with the language of category theory, the named sets, or the like. (An instance of categorically-oriented articles discussing torsors is [13]. Regarding the named sets, the readers should refer to the appendix A of [14] and references therein. Chu spaces, which are used in Section 2.2, also are described in the same appendix as a special case of named sets.) Each of such formulations has its own value for a toy model of representation phenomena. The point of the present study is that the representation has a torsorial nature. Toy models in various formulations may also be used to describe phenomena of representations. There is much room to be investigated for formulating richer structures suitable for individual representation phenomenon to be modeled.
This study is exploratory in nature. There must be many representation phenomena that cannot be described in this model, and the algebraic consequences of the model are not widely explored yet. However, it seems that this model can be expected to capture some essential properties of the representation and have values for studying the representation phenomena. The value of this toy model depends on valuable applications for various studies. Although the application of this model might be restricted to theoretical settings, there will be many potential application fields of this toy model. Body languages or gestures often cause problems that originate from the two-sidedness of representation-one gesture may have multiple meanings that can be determined by the each witness. Cross-cultural or intercultural communications may suffer from similar problems. To study on these problems, the toy model may be of help. The model may also be applicable to the study of information exchanges between animals, such as ants or bees, when the researcher tries to describe the researcher’s-human’s-view explicitly. Besides these fields in which representation problems come to the fore, studies of our daily information exchanges, such as information theory, linguistics, communication theories, studies of man-machine interfaces, etc., may be able to utilize the toy model, when they deal with semantical something. The author expects that future studies will utilize this toy model and improve the model along the same line by refining the model, finding more suitable mathematical structure, and other ways.
References
- Heylighen, F. Representation and Change. A Metarepresentational Framework for the Foundations of Physical and Cognitive Science; Communication & Cognition: Ghent, Belgium, 1990. [Google Scholar]
- Yoshitake, M.; Saruwatari, Y. Extensional information articulation from the universe. Information 2012. [Google Scholar]
- Bateson, G. Steps to an Ecology of Mind: Collected Essays in Anthropology, Psychiatry, Evolution, and Epistemology; University of Chicago Press: Chicago, IL, USA, 1972. [Google Scholar]
- Mizoguchi, R. Tutorial on ontological engineering-Part 3: Advanced course of ontological engineering. New Gener. Comput. 2004, 22, 193–220. [Google Scholar] [CrossRef]
- Ashby, W.R. An Introduction to Cybernetics; Chapman & Hall: London, UK, 1957. [Google Scholar]
- Heylighen, F. Self-organization, emergence and the architecture of complexity. In Proceedings of the 1st European Conference on System Science, Paris, France, 1989; pp. 23–32.
- Pratt, V. Chu spaces: Course notes for the School in Category Theory and Applications. 1999. Available online: http://boole.stanford.edu/pub/coimbra.pdf (accessed on 22 June 2012).
- Tsujishita, T. Mathematics: Science of Complex Systems and Modern Thought; Seidosha: Tokyo, Japan, 1998; pp. 75–225. [Google Scholar]
- Ganter, B.; Wille, R. Formal Concept Analysis : Mathematical Foundations; Springer-Verlag: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Bertram, W.; Kinyon, M. Associative geometries I: Torsors, linear relations and grassmannians. J. Lie Theory 2010, 20, 215–252. [Google Scholar]
- Baez, J. Torsors Made Easy. 2009. Available online: http://math.ucr.edu/home/baez/torsors.html (accessed on 22 June 2012).
- Certaine, J. The ternary operation (abc) = ab-1c of a group. Bull. Am. Math. Soc. 1943, 49, 869–877. [Google Scholar] [CrossRef]
- Booker, T.; Street, R. Torsors, herds and flocks. J. Algebra 2011, 330, 346–374. [Google Scholar] [CrossRef]
- Burgin, M. Theory of Information: Fundamentality,Diversity and Unification; World Scientific: Singapore, 2010. [Google Scholar]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
MDPI and ACS Style
Yoshitake, M. A Toy Model for Torsorial Nature of Representations. Information 2012, 3, 546-566. https://doi.org/10.3390/info3040546
AMA Style
Yoshitake M. A Toy Model for Torsorial Nature of Representations. Information. 2012; 3(4):546-566. https://doi.org/10.3390/info3040546
Chicago/Turabian StyleYoshitake, Makoto. 2012. "A Toy Model for Torsorial Nature of Representations" Information 3, no. 4: 546-566. https://doi.org/10.3390/info3040546