
Communication-Theoretic Model of Power Talk for a Single-Bus DC Microgrid



Abstract
:1. Introduction
2. Brief Overview of Microgrids’ Control
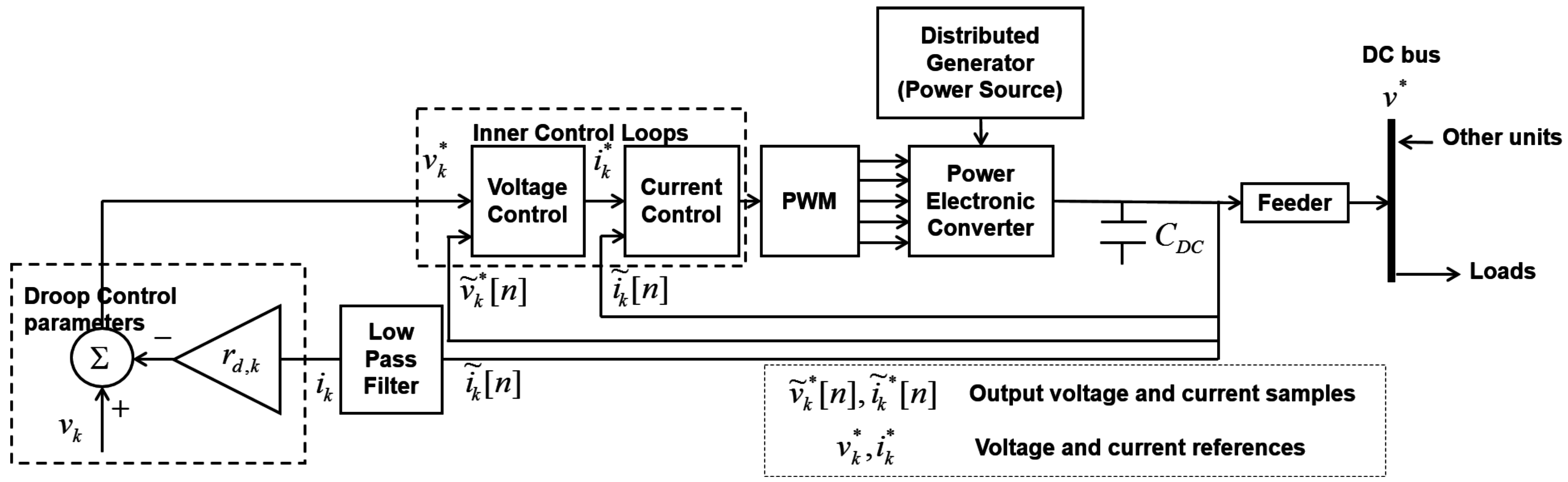
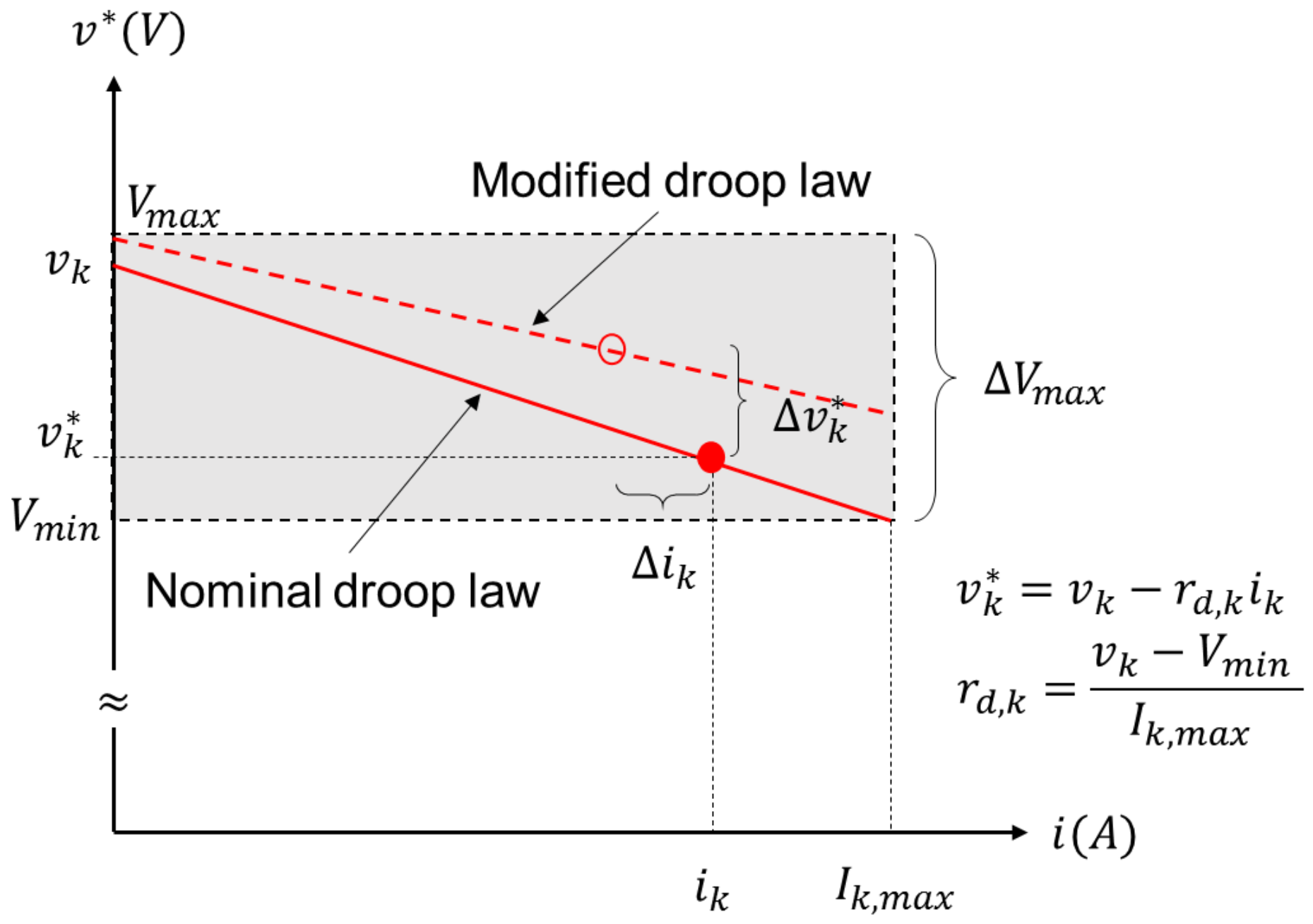
2.1. Control Architecture
2.2. Communications for Microgrid Control
2.3. How Power Talk Can Help
3. Power Talk in DC Microgrids
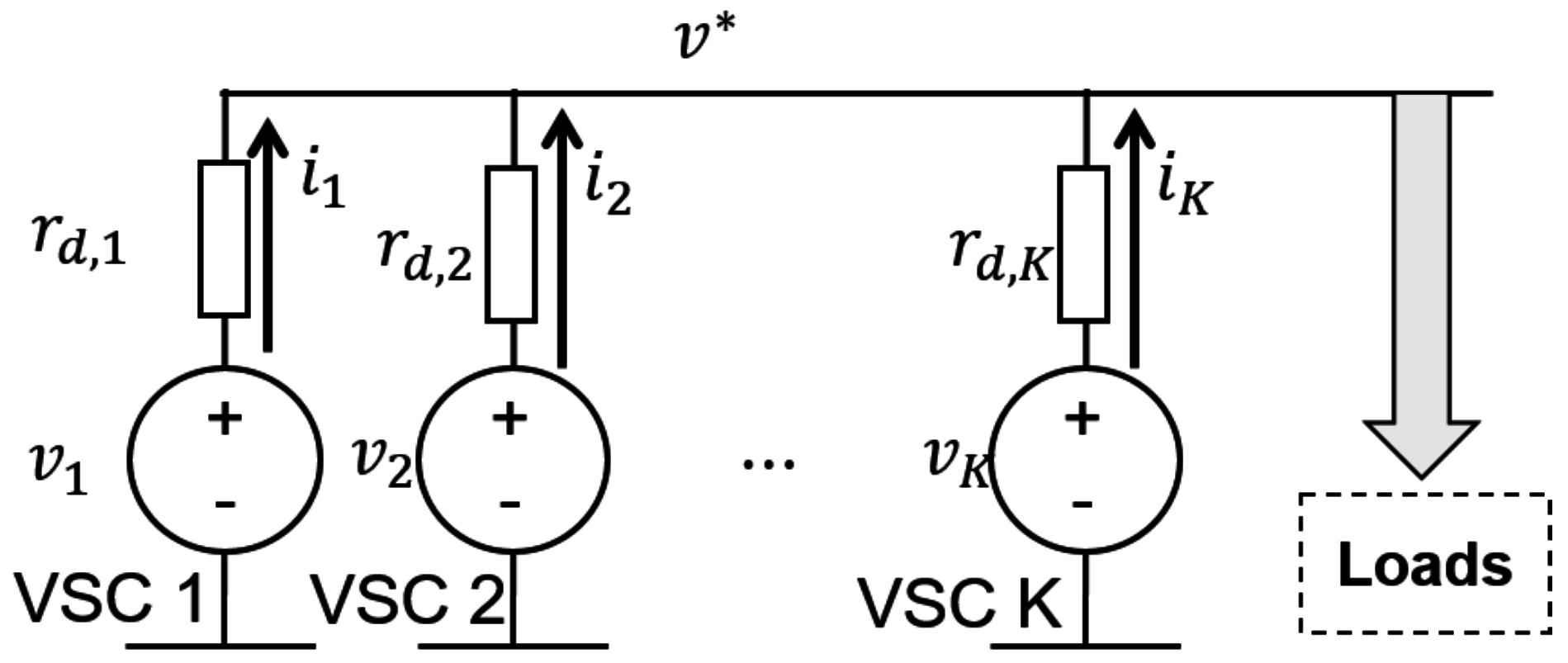
3.1. Preliminaries and Assumptions
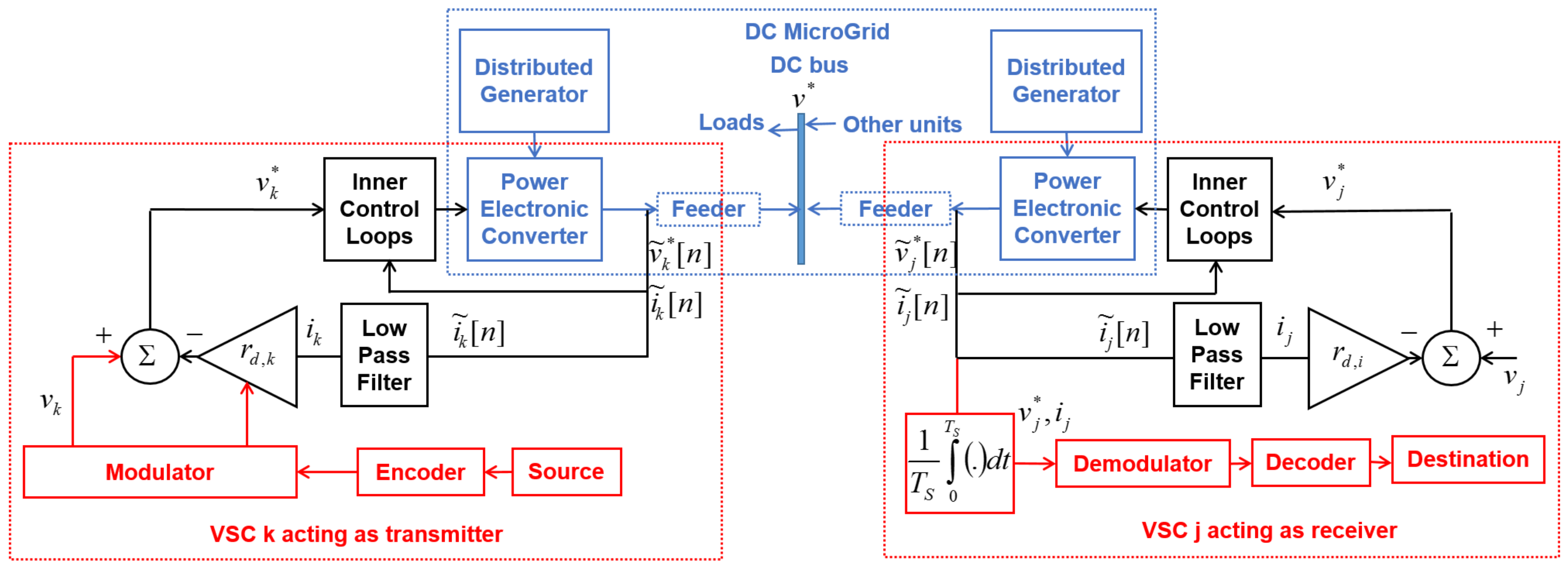
3.2. All-to-All Power Talk: Time Division Multiple Access
3.2.1. Input Symbols
3.2.2. Output Symbols
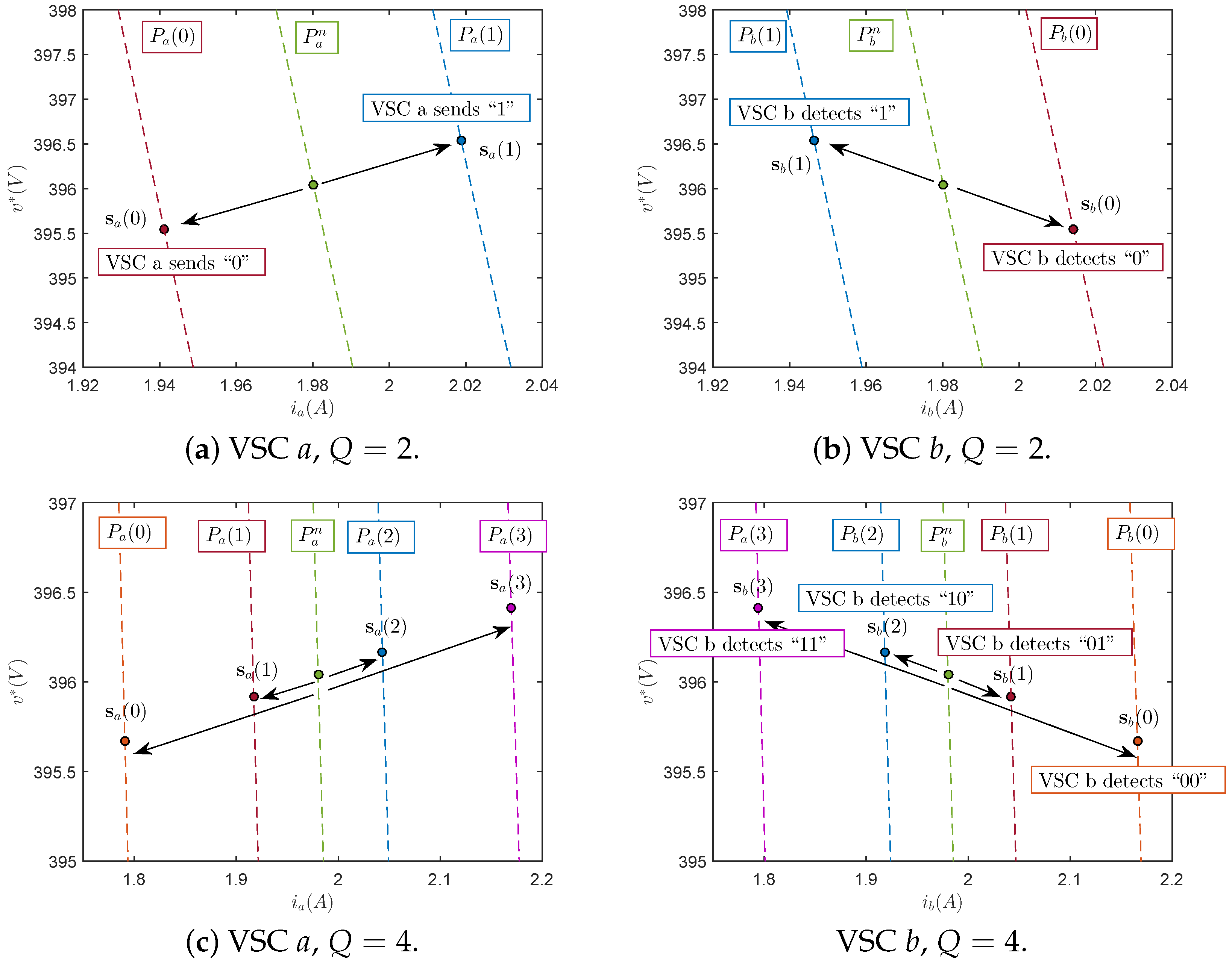
- The described communication protocol requires prior knowledge of all possible points in the detection space of VSC j. As the detailed configuration of the MG is not known a priori, these values have to be learned, e.g., in a predefined training phase, during which each VSC constructs the detection space. This is analogous to the case of channel estimation in a standard communication system where a linear relation between the input and the output can be postulated. Power talk does not use such a relation; instead, in the training phase, each unit learns each possible output in the detection space and identifies which input combination causes the respective inputs.
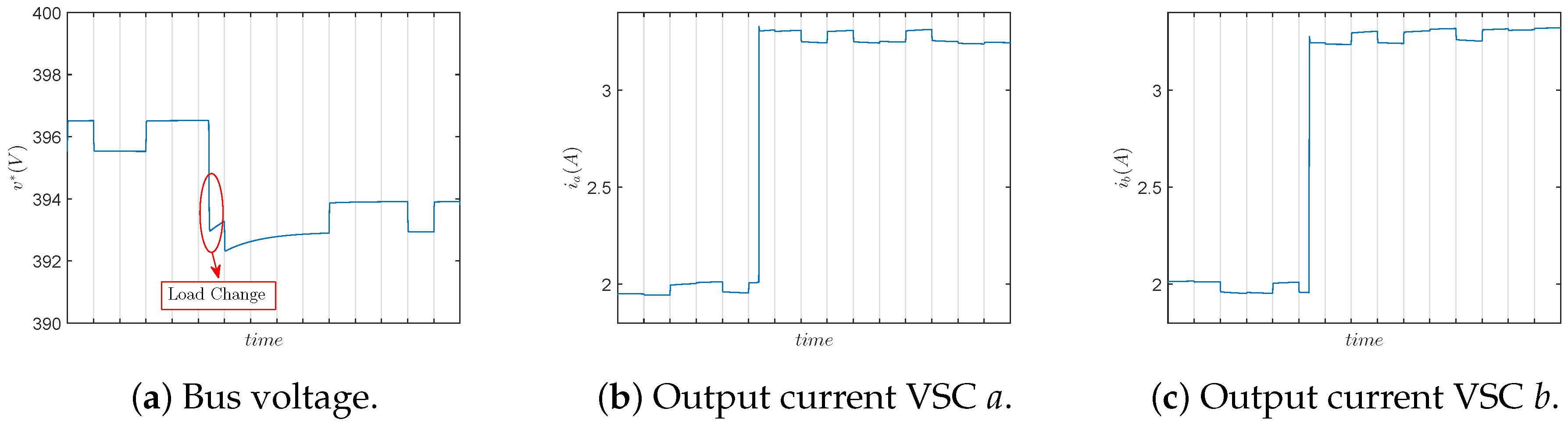
- The output power of a VSC can also vary as a result of the load change, which happens arbitrarily and randomly. In particular, the current values of the loads can be seen as determining the state of the system or the state of the communication channel. Whenever they change, the structure of the detection space also changes, leading to incorrect decisions at the receivers if the detection space prior to change is still used. A strategy to deal with random state variations is to periodically repeat the training phase or to provide a mechanism that tracks the state changes and re-initiates the training phase whenever a change is detected. Section 5 outlines possible strategies to deal with this challenge.
4. Constraining Power Talk
4.1. The Signaling Space
4.2. The Detection Space
5. Dealing with Random Load Changes
6. Performance Evaluation
7. On the General Power Talk Channel Model
8. Conclusions and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lasseter, R. Microgrids. In Proceedings of the IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; pp. 305–308.
- Hatziargyriou, N. Microgrids: Architectures and Control; Wiley-IEEE Press: New York, NY, USA, 2014. [Google Scholar]
- Bush, S.F. Smart Grid: Communication-Enabled Intelligence for the Electric Power Grid; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]
- Yan, Y.; Qian, Y.; Sharif, H.; Tipper, D. A survey on smart grid communication infrastructures: Motivations, requirements and challenges. IEEE Commun. Surveys Tutor. 2013, 15, 15–20. [Google Scholar] [CrossRef]
- Galli, S.; Scaglione, A.; Wang, Z. For the grid and through the grid: The role of power line communications in the smart grid. IEEE Proc. 2011, 99, 998–1027. [Google Scholar] [CrossRef]
- Guerrero, J.; Vasquez, J.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Guerrero, J.; Chandorkar, M.; Lee, T.; Loh, P. Advanced control architectures for intelligent microgrids; part i: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Jin, C.; Wang, P.; Xiao, J.; Tang, Y.; Choo, F.H. Implementation of hierarchical control in DC microgrids. IEEE Trans. Ind. Electron. 2014, 68, 4032–4042. [Google Scholar] [CrossRef]
- Schonberger, J.; Duke, R.; Round, S. DC-bus signaling: A distributed control strategy for a hybrid renewable nanogrid. IEEE Trans. Ind. Electron. 2006, 53, 1453–1460. [Google Scholar] [CrossRef]
- Chen, D.; Xu, L.; Yao, L. DC voltage variation based autonomous control of DC microgrids. IEEE Trans. Power Deliv. 2013, 28, 637–648. [Google Scholar] [CrossRef]
- Vandoorn, T.; Renders, B.; Degroote, L.; Meersman, B.; Vandevelde, L. Active load control in islanded microgrids based on the grid voltage. IEEE Trans. Smart Grid 2011, 2, 139–151. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, L.; Xing, Y.; Guerrero, J. A distributed control strategy based on DC bus signaling for modular photovoltaic generation systems with battery energy storage. IEEE Trans. Power Electron. 2011, 26, 3032–3045. [Google Scholar] [CrossRef]
- Angjelichinoski, M.; Stefanovic, C.; Popovski, P.; Liu, H.; Loh, P.; Blaabjerg, F. Power talk: How to modulate data over a DC micro grid bus using power electronics. In Proceedings of the 6th IEEE International Conference on Smart Grid Communications (SmartGridComm 2015), Miami, FL, USA, 2–5 November 2015.
- Angjelichinoski, M.; Stefanovic, C.; Popovski, P.; Blaabjerg, F. Power talk in DC micro grids: Constellation design and error probability performance. 2015; arXiv:1507.02598. [Google Scholar]
- Pogaku, N.; Prodanovic, M.; Green, T. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Mohamed, Y.-R.; El-Saadany, E. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Chen, Z.; Kjaer, S. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar] [CrossRef]
- Dragicevic, T.; Guerrero, J.; Vasquez, J.; Skrlec, D. Supervisory control of an adaptive-droop regulated DC microgrid with battery management capability. IEEE Trans. Power Electron. 2014, 29, 695–706. [Google Scholar] [CrossRef]
- Giannakis, G.; Kekatos, V.; Gatsis, N.; Kim, S.-J.; Zhu, H.; Wollenberg, B. Monitoring and Optimization for Power Grids: A Signal Processing Perspective. IEEE Signal Process. Mag. 2013, 30, 107–128. [Google Scholar] [CrossRef]
- Liang, H.; Choi, B.J.; Abdrabou, A.; Zhuang, W.; Shen, X. Decentralized Economic Dispatch in Microgrids via Heterogeneous Wireless Networks. IEEE J. Sel. Areas Commun. 2012, 30, 1061–1074. [Google Scholar] [CrossRef]
- Sangswang, A.; Nwankpa, C. Effects of switching-time uncertainties on pulsewidth-modulated power converters: Modeling and analysis. IEEE Trans. Circuits Syst. I 2003, 50, 1006–1012. [Google Scholar] [CrossRef]
- Cobreces, S.; Bueno, E.; Pizarro, D.; Rodriguez, F.; Huerta, F. Grid impedance monitoring system for distributed power generation electronic interfaces. IEEE Trans. Instrum. Meas. 2009, 58, 3112–3121. [Google Scholar] [CrossRef]
- Midya, P.; Krein, P. Noise properties of pulse-width modulated power converters: Open-loop effects. IEEE Trans. Power Electron. 2000, 15, 1134–1143. [Google Scholar] [CrossRef]
- Mazumder, S.; Nayfeh, A.; Boroyevich, D. Theoretical and experimental investigation of the fast- and slow-scale instabilities of a DC-DC converter. IEEE Trans. Power Electron. 2001, 16, 201–216. [Google Scholar] [CrossRef]
- Cavallini, A.; Montanari, G.; Cacciari, M. Stochastic evaluation of harmonics at network buses. IEEE Trans. Power Deliv. 1995, 10, 1606–1613. [Google Scholar] [CrossRef]
- Sangswang, A.; Nwankpa, C. Random noise in switching DC-DC converter: Verification and analysis. In Proceedings of the 2003 IEEE International Symposium on Circuits and Systems (ISCAS 2003), Bangkok, Thailand, 25–28 May 2003.
- Sanchez, S.; Molinas, M. Large signal stability analysis at the common coupling point of a DC microgrid: A grid impedance estimation approach based on a recursive method. IEEE Trans. Energy Convers. 2015, 30, 122–131. [Google Scholar] [CrossRef]
- Kay, S. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | |
| Symbols | Meaning |
| Electrical Parameters | |
| Bus voltage level | |
| Output current of unit k | |
| Output power of unit k | |
| Reference voltage of the droop control | |
| Virtual resistance of the droop control | |
| Resistive part of the load | |
| Constant power part of the load | |
| Power Talk-related Parameters | |
| Symbol slot duration | |
| The bit combination sent bu unit k | |
| Power talk symbol representing | |
| The Hamming weight of | |
| Power talk symbol received by unit j | |
| Signaling space | |
| Constraint space | |
| Relative power deviation of unit j when unit k transmits | |
| η, μ | Transmission, reception rate |
| Abbreviations | |
| Smart grid | SG |
| Direct current, alternate current | DC, AC |
| Microgrid | MG |
| Distributed energy resource | DER |
| Distributed generator | DG |
| Energy storage system | ESS |
| Time division multiple access | TDMA |
| Voltage source converter | VSC |
| Current source converter | CSC |
| Piecewise Linear Electrical Circuit Simulation | PLECS |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angjelichinoski, M.; Stefanović, Č.; Popovski, P.; Blaabjerg, F. Communication-Theoretic Model of Power Talk for a Single-Bus DC Microgrid. Information 2016, 7, 18. https://doi.org/10.3390/info7010018
Angjelichinoski M, Stefanović Č, Popovski P, Blaabjerg F. Communication-Theoretic Model of Power Talk for a Single-Bus DC Microgrid. Information. 2016; 7(1):18. https://doi.org/10.3390/info7010018
Chicago/Turabian StyleAngjelichinoski, Marko, Čedomir Stefanović, Petar Popovski, and Frede Blaabjerg. 2016. "Communication-Theoretic Model of Power Talk for a Single-Bus DC Microgrid" Information 7, no. 1: 18. https://doi.org/10.3390/info7010018
APA StyleAngjelichinoski, M., Stefanović, Č., Popovski, P., & Blaabjerg, F. (2016). Communication-Theoretic Model of Power Talk for a Single-Bus DC Microgrid. Information, 7(1), 18. https://doi.org/10.3390/info7010018