Improved Joint Probabilistic Data Association (JPDA) Filter Using Motion Feature for Multiple Maneuvering Targets in Uncertain Tracking Situations


Abstract
:1. Introduction
2. Uncertain Models and Fusion of Measurements and Observed Angles
2.1. Uncertain Models of Measurements and Observed Angles
2.2. Analyzing the Influence of Clutters on Measurements and Observed Angles
2.3. Uncertain Fusion of Measurements and Observed Angles
3. Fuzzy Recursive Least Squares Filter (FRLSF)
4. Improved Joint Probabilistic Data Association-Fuzzy Recursive Least Squares Filter (IJPDA-FRLSF)
4.1. Calculating the Generalized Joint Association Probability
4.2. The propsed IJPDA-FRLSF
- Step 1. Initialize state and filter covariance of target for using Equations (26) and (27), and start the recursive formulas at time .
- Step 2. Compute predicted innovation on measurement using Equation (18).
- Step 3. Compute innovation covariance using Equation (19).
- Step 4. Compute gain matrix using Equation (20).
- Step 5. Reconstruct the generalized joint association probability using Equation (34).
- Step 6. Compute the fuzzy fading factor using Equation (21).
- Step 7. Update the target state and filter covariance by FRLSF using Equations (35) and (36)where is the local state estimate by FRLSF.
- Step 8. Repeat the steps 2–7 for the next iterations.
5. Experimental Results and Analysis
5.1. An Example of a Simulation Data Set: Two Crossing Targets
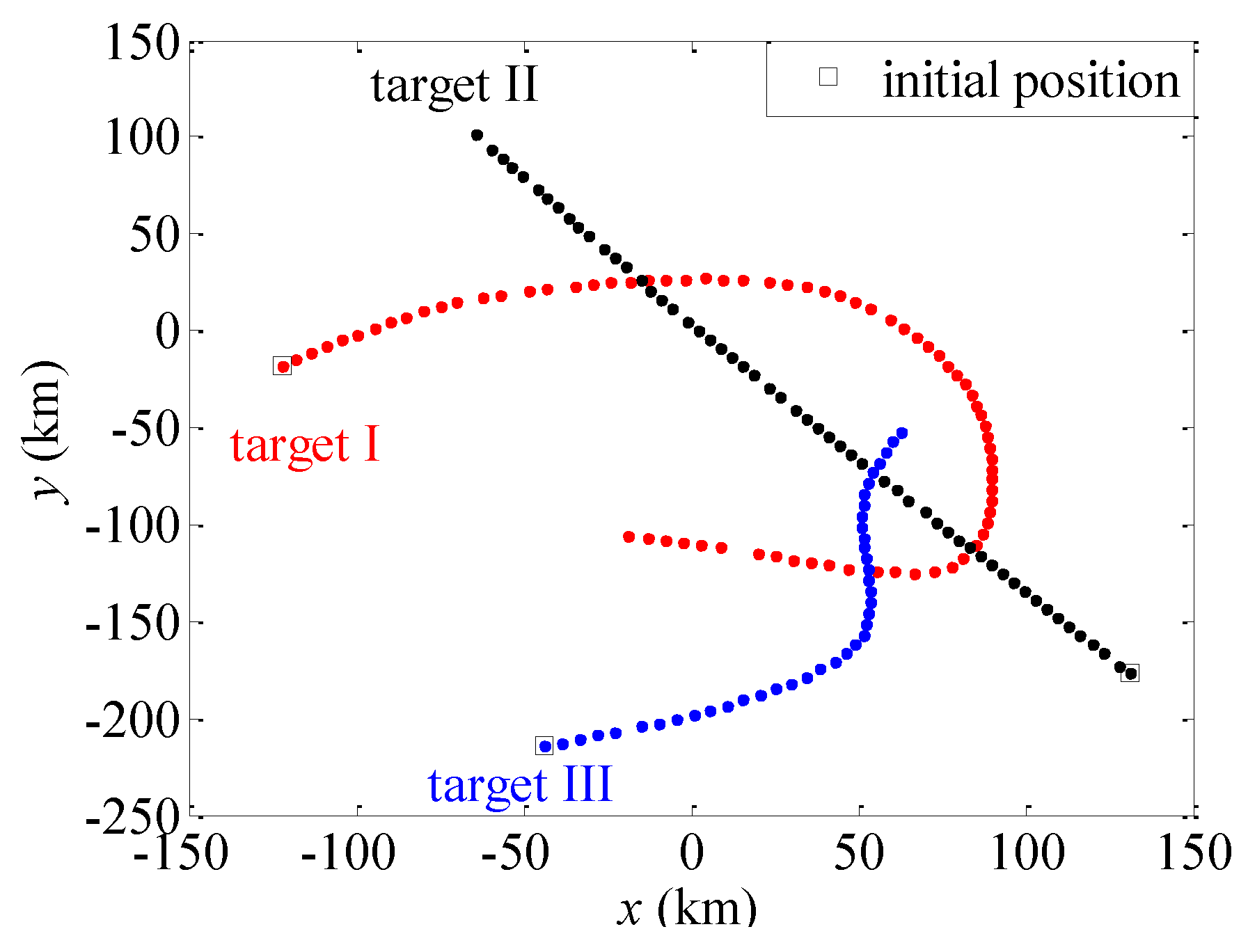
5.2. An Example of a Real Data Set: Three Crossing Targets
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking-Part III: Measurement models. In Proceedings of the Signal and Data Processing of Small Targets, San Diego, CA, USA, 29 July–3 August 2001; pp. 423–446. [Google Scholar]
- Qiu, C.; Zhang, Z.; Lu, H.; Luo, H. A survey of motion-based multitarget tracking methods. Prog. Electromagn. Res. B 2015, 62, 195–223. [Google Scholar] [CrossRef]
- Liggins, M.; Hall, D.; Llinas, J. Handbook of Multisensor Data Fusion: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Aziz, A.M. A new nearest-neighbor association approach based on fuzzy clustering. Aerosp. Sci. Technol. 2013, 26, 87–97. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Tse, E. Tracking in a cluttered environment with probabilistic data association. Automatica 1975, 11, 451–460. [Google Scholar] [CrossRef]
- Fortmann, T.; Bar-Shalom, Y.; Scheffe, M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE J. Ocean. Eng. 1983, 8, 173–184. [Google Scholar] [CrossRef]
- Aziz, A.M. A joint possibilistic data association technique for tracking multiple targets in a cluttered environment. Inf. Sci. 2014, 280, 239–260. [Google Scholar] [CrossRef]
- Wang, J.; Jin, Y.H.; Dong, H.C.; Quan, T.F. Research on data association with velocity-assisted information for radar targets. Syst. Eng. Electron. 2008, 30, 2333–2335. [Google Scholar]
- Li, Z.; Chen, S.; Leung, H.; Bosse, E. Joint data association, registration, and fusion using EM-KF. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 496–507. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Zhang, Z.; Li, S.; Zhou, J. Joint tracking of performance model parameters and system behavior using a multiple-model Kalman Filter. IEICE Trans. Inf. Syst. 2013, 96, 1309–1322. [Google Scholar] [CrossRef]
- Zhu, Y.M. Efficient recursive state estimator for dynamic systems without knowledge of noise covariances. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 102–114. [Google Scholar] [CrossRef]
- Li, L.Q.; Xie, W.X.; Liu, Z.X. A novel quadrature particle filtering based on fuzzy c-means clustering. Knowl.-Based Syst. 2016, 106, 105–115. [Google Scholar]
- Kim, D.S.; Song, T.L.; Mušicki, D. Highest probability data association for multi-target particle filtering with nonlinear measurements. IEICE Trans. Commun. 2013, 96, 281–290. [Google Scholar] [CrossRef]
- Foo, P.H. Combining the interacting multiple model method with particle filters for manoeuvring target tracking with a multistatic radar system. IET Radar Sonar Navig. 2011, 5, 697–706. [Google Scholar] [CrossRef]
- Ning, Q.; Yan, S.; Liu, L.; Guo, B. Study on multiple maneuvering targets tracking based on JPDA algorithm. J. Meas. Sci. Instrum. 2016, 7, 30–34. [Google Scholar]
- Wang, L.X. A Course in Fuzzy Systems; Prentice-Hall Press: Upper Saddle River, NY, USA, 1999. [Google Scholar]
- Li, L.; Ji, H.; G, X. Maximum entropy fuzzy clustering with application to real-time target tracking. Signal Process. 2006, 86, 3432–3447. [Google Scholar]
- Li, L.Q.; Xie, W.X. Intuitionistic fuzzy joint probabilistic data association filter and its application to multitarget tracking. Signal Process. 2014, 96, 433–444. [Google Scholar]
- Fan, E.; Xie, W.X.; Liu, Z.X. Maneuvering target tracking using fuzzy logic-based recursive least squares filter. EURASIP J. Adv. Signal Process. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- Zhai, D.; Lu, A.Y.; Dong, J.; Zhang, Q. Adaptive fuzzy tracking control for a class of switched uncertain nonlinear systems: an adaptive state-dependent switching law method. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 2282–2291. [Google Scholar] [CrossRef]
- Li, X.; Fan, E.; Shen, S.; Hu, K.; Li, P. Fuzzy probabilistic data association filter and its application to single maneuvering target. EURASIP J. Adv. Signal Process. 2016, 2016, 1–13. [Google Scholar] [CrossRef]
- Fan, E.; Xie, W.; Liu, Z.; Li, P. Combining generalized JPDA and FRLS filter for tracking multiple maneuvering targets. In Proceedings of the IEEE 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 239–245. [Google Scholar]
- Gu, X.; Wang, H.T.; Wang, L.F.; Wang, Y.; Chen, R.B.; Pan, C.H. Fusing multiple features for object tracking based on uncertainty measurement. Acta Autom. Sin. 2011, 37, 550–559. [Google Scholar]
- Qi, W.J.; Zhang, P.; Deng, Z.L. Robust sequential covariance intersection fusion Kalman filtering over multi-agent sensor networks with measurement delays and uncertain noise variances. Acta Autom. Sin. 2014, 40, 2632–2642. [Google Scholar] [CrossRef]
- Blom, H.A.; Bloem, E.A. Combining IMM and JPDA for tracking multiple maneuvering targets in clutter. In Proceedings of the 5th International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002; pp. 705–712. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target I | Target II | ||
|---|---|---|---|
| Periods | Time | Periods | Time |
| constant velocity (CV) | 14 s | constant velocity (CV) | 14 s |
| constant turn (CT) | 1 s | constant turn (CT) | 1 s |
| constant acceleration (CA) | 14 s | constant acceleration (CA) | 14 s |
| constant turn (CT) | 1 s | constant turn (CT) | 1 s |
| constant velocity (CV) | 5 s | constant velocity (CV) | 6 s |
| Filter | CV | CT | CA | CT | CV |
|---|---|---|---|---|---|
| IJPDA-FRLSF | 21.5 | 22.0 | 22.1 | 22.5 | 22.0 |
| IMM-JPDAF(II) | 14.8 | 13.3 | 32.0 | 37.3 | 37.0 |
| IMM-JPDAF(IIIA) | 17.5 | 16.9 | 26.2 | 35.3 | 25.0 |
| IMM-JPDAF(IIIB) | 22.7 | 23.5 | 35.3 | 47.2 | 38.5 |
| Filter | CV | CT | CA | CT | CV |
|---|---|---|---|---|---|
| IJPDA-FRLSF | 22.1 | 21.9 | 22.1 | 22.6 | 21.8 |
| IMM-JPDAF(II) | 15.0 | 15.0 | 30.9 | 36.8 | 37.2 |
| IMM-JPDAF(IIIA) | 16.5 | 15.9 | 24.6 | 32.4 | 24.8 |
| IMM-JPDAF(IIIB) | 23.7 | 23.4 | 36.0 | 46.5 | 38.1 |
| Filter | CV | CT | CA | Total |
|---|---|---|---|---|
| IJPDA-FRLSF | mean | good | good | fair |
| IMM-JPDAF(II) | good | mean | mean | mean |
| IMM-JPDAF(IIIA) | fair | fair | fair | good |
| IMM-JPDAF(IIIB) | poor | poor | poor | poor |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, E.; Xie, W.; Pei, J.; Hu, K.; Li, X.; Podpečan, V. Improved Joint Probabilistic Data Association (JPDA) Filter Using Motion Feature for Multiple Maneuvering Targets in Uncertain Tracking Situations. Information 2018, 9, 322. https://doi.org/10.3390/info9120322
Fan E, Xie W, Pei J, Hu K, Li X, Podpečan V. Improved Joint Probabilistic Data Association (JPDA) Filter Using Motion Feature for Multiple Maneuvering Targets in Uncertain Tracking Situations. Information. 2018; 9(12):322. https://doi.org/10.3390/info9120322
Chicago/Turabian StyleFan, En, Weixin Xie, Jihong Pei, Keli Hu, Xiaobin Li, and Vid Podpečan. 2018. "Improved Joint Probabilistic Data Association (JPDA) Filter Using Motion Feature for Multiple Maneuvering Targets in Uncertain Tracking Situations" Information 9, no. 12: 322. https://doi.org/10.3390/info9120322